Hallo Zusammen, in meinem Schulprojekt möchte ich einen alten Roboter mit 6 DC-Motoren über Analog-Ausgangsklemmen von Beckhoff in der Geschwindigkeit regeln können. Dafür habe ich folgende Boards gekauft: https://www.amazon.de/gp/product/B07F6YJC2S/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1 Meine Ausgangsklemmen von Beckhoff sind diese hier: https://www.beckhoff.com/de-de/produkte/i-o/busklemmen/kl4xxx-analog-ausgang/kl4002.html Das Problem ist, dass ich nicht genau weiß wie ich das Poti auf den Controllern gegen das 0-10V Signal von den Beckhoff Klemmen "tauschen" soll. Da ich eher der Programmierer bin, bin ich mit dieser Aufgabe leider etwas überfordert. Wenn mir einer einen Tipp geben könnte wäre ich da sehr dankbar. MfG, Teebow
Malte S. schrieb: > Dafür habe ich folgende Boards gekauft: > https://www.amazon.de/gp/product/B07F6YJC2S/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1 Ungeeignet, die haben keinen 0-10V Eingang. Und Regler sind es auch nicht.
> Ungeeignet, die haben keinen 0-10V Eingang. Und Regler sind es auch > nicht. Ich habe leider noch kein Board mit 0-10V Eingang gefunden, deswegen wollte ich ja das Poti irgendwie ersetzen.
Malte S. schrieb: >> Ungeeignet, die haben keinen 0-10V Eingang. Und Regler sind es > auch >> nicht. > > Ich habe leider noch kein Board mit 0-10V Eingang gefunden, deswegen > wollte ich ja das Poti irgendwie ersetzen. Das stellst du dir zu einfach vor.
Malte S. schrieb: > Ich habe leider noch kein Board mit 0-10V Eingang gefunden, deswegen > wollte ich ja das Poti irgendwie ersetzen. Aber nicht mit dieser Schaltung. Das ist ein NE555 mit variabler PWM durch zwei antiparallele Dioden und dem Poti. Da ist nix mit Steuerspannung. Schaltung sieht etwa so aus: https://www.elektronik-kompendium.de/public/schaerer/pwm555.htm Bild 3 triffts.
Es gibt elektronische Potis, aber die werden digital angesteuert. https://www.mouser.de/c/semiconductors/integrated-circuits-ics/digital-potentiometer-ics/ (2200 Typen) Und Motor-Potis https://www.reichelt.de/schiebepotentiometer-mono-5-kohm-linear-rs60n11m9-lin5k-p73883.html?&trstct=pol_2&nbc=1 drehen bzw. schieben nur mit dem Motor am Poti,solange Spannung anliegt. Da ist der Drehwinkel nicht mit der Spannung verknüpft.
Angehängte Dateien:
-

PWM_Modulator.png
52 KB
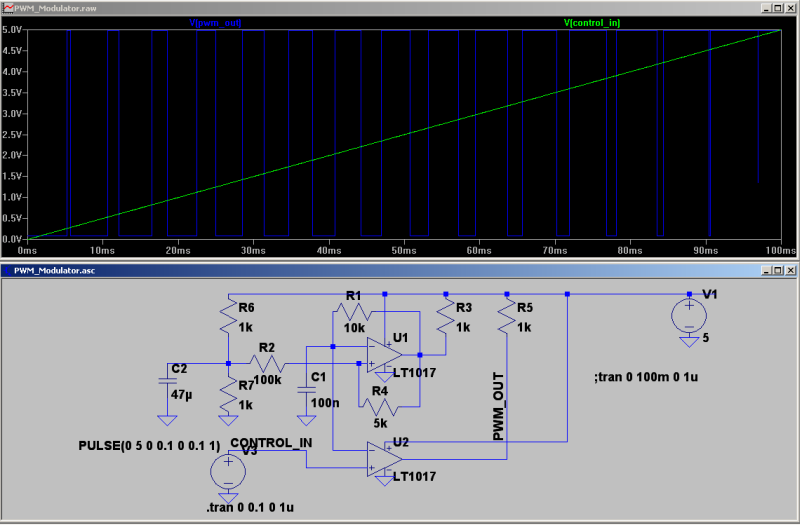
Ich vermute, du suchst den klassischen PWM Modulator aus Dreieckgenerator und Komparator. Habe ich vor langer Zeit mal in LTSpice gebastelt, siehe Anhang.
Matthias S. schrieb: > Ich vermute, du suchst den klassischen PWM Modulator aus > Dreieckgenerator und Komparator. Habe ich vor langer Zeit mal in LTSpice > gebastelt, siehe Anhang. Er sucht wohl ehr ein fertiges Modul.
Dieses Modul hat einen 0-5V Eingang, für 0-10V also nur ein Spannungsteiler nötig. https://www.ebay.de/itm/112869818416
> Er sucht wohl ehr ein fertiges Modul. Das wäre nätürlich am einfachsten. Aber wenn ich eine Schaltung hätte, könnte ich einen Kollegen fragen ob der das für mich Löten kann etc. Matthias S. schrieb: > Ich vermute, du suchst den klassischen PWM Modulator aus > Dreieckgenerator und Komparator. Habe ich vor langer Zeit mal in LTSpice > gebastelt, siehe Anhang. Kann ich bei dem Schaltbild rechts die 0-10V anschließen?
>6 DC-Motoren das ist schon eine Menge Es gibt Treiber-Module für DC-Motoren https://eckstein-shop.de/Pololu-Mortoren-Treiber das wäre die typische Ansteuerung, aber das sind dann eben 6 Stück davon und irgendein Arduino oder Raspberry Pi zur Ansteuerung.
Malte S. schrieb: > Kann ich bei dem Schaltbild rechts die 0-10V anschließen? Nee, besser links unten bei Control_In. Das ist ein 0-5V Eingang, ist aber mit einem Spannungsteiler leicht anzupassen. Der OpAmp ist ein Rail-to-Rail Typ, Versorgung mit 5V. Aber es wurde ja auch schon ein fertiges Exemplar mit Polwender gepostet.
Matthias S. schrieb: > Nee, besser links unten bei Control_In. Ja. Hätte ich auch sehen müssen... ^^ Christoph db1uq K. schrieb: > das ist schon eine Menge > und irgendein Arduino oder Raspberry Pi zur Ansteuerung. Ich darf es nicht über Arduino machen. Vorgabe ist Beckhoff leider.
Früher hätte man vielleicht mit der Gleichspannung eine Glühbirne betrieben, die einen Fotowiderstand beleuchtet. Aber seit Glühbirnen und cadmiumhaltige Fotowiderstände selten geworden sind, ist das auch veraltet. Außerdem ändert der Fotowiderstand seinen Wert sehr nichtlinear von mehreren Megaohm bis vielleicht 50 Ohm herunter. Umpolen kann man so auch nicht. Irgendeine H-Brücke wie der L298 könnte mit der Gleichspannung angesteuert werden, da gibt es auch Module. Die kann auch umpolen, um die Drehrichtung zu ändern. Wird allerdigs heiß, wenn sie DC ausgibt statt PWM. https://eckstein-shop.de/L298NSchrittmotorendstufeHBrC3BCckeDCStepperMotorTreiberDriverModul nein ,der kann nur PWM, aber es gibt sicher andere H-Brücken https://www.st.com/en/motor-drivers/l298.html
Christoph db1uq K. schrieb: > Irgendeine H-Brücke wie der L298 könnte mit der Gleichspannung > angesteuert werden, da gibt es auch Module. Die kann auch umpolen, um > die Drehrichtung zu ändern. Wird allerdigs heiß, wenn sie DC ausgibt > statt PWM. > https://eckstein-shop.de/L298NSchrittmotorendstufeHBrC3BCckeDCStepperMotorTreiberDriverModul > > nein ,der kann nur PWM, aber es gibt sicher andere H-Brücken > https://www.st.com/en/motor-drivers/l298.html Dann werde ich mich wohl weiter umgucken müssen. Danke an alle für eure Ideen etc.
https://www.st.com/content/ccc/resource/sales_and_marketing/promotional_material/brochure/bf/aa/d0/60/38/83/43/74/Brochure_Motor_Control.pdf/files/Brochure_Motor_Control.pdf/jcr:content/translations/en.Brochure_Motor_Control.pdf Alles was mit DC angesteuert wird ist analog, hat also viel Verlustwärme. Für den Roboter wäre PWM die richtige Methode, aber die ist digital.
Kenn mich im Beckhoff-Umfeld nicht aus obs da was passendes gibt, aber die potis könnte man ja zur Not mit Modellbauservos "ansteuern".
Malte S. schrieb: > alten Roboter mit 6 DC-Motoren Kannst du bitte etwas mehr erzaehlen uber der Robot (fotos?). Wie grosz ist er, welche Motoren werden benutzt ? Musz da keine positionsruckmeldung benutzt werden ? Patrick aus die Niederlaende
Mein preisgünstigster Vorschlag; Glühlämpchen und Fotowiderstand an dem NE555-Modul, dazu ein Relais 2*um mit Schalttransistor als Polwendeschalter. Solange der Beckhoff negative Spannung abgibt bleibt das Relais abgefallen, für positive Spannung schaltet es die Motorrichtung um. Aber ein DC-Motor am Roboter ohne irgendeine Positionsrückmeldung kann ja nur ein Spielzeug werden.
Christoph db1uq K. schrieb: > Mein preisgünstigster Vorschlag; Glühlämpchen und Fotowiderstand > an dem > NE555-Modul, dazu ein Relais 2*um mit Schalttransistor als > Polwendeschalter. Solange der Beckhoff negative Spannung abgibt bleibt > das Relais abgefallen, für positive Spannung schaltet es die > Motorrichtung um. > Mal gucken ob ich das durch bekomme :D > Aber ein DC-Motor am Roboter ohne irgendeine Positionsrückmeldung kann > ja nur ein Spielzeug werden. Die Positionsgeber sind alle schon erfolgreich angeschlossen und geben auch vernünftige Werte. ^^
Fotowiderstände sind wirklich selten geworden, früher gab es den LDR03 und LDR07 https://cdn-reichelt.de/documents/datenblatt/A300/101020014_03.pdf auf der dritten Seite sind noch ein paar aus China, einer davon ist hier verbaut: https://www.reichelt.de/arduino-grove-lichtsensor-gl5528-grv-light-sens-p191152.html?&trstct=pos_66&nbc=1 Conrad hat noch ein paar Typen https://www.conrad.de/de/f/fotowiderstand-ldr-3035789.html Conrad-Nr. 1762911 hat aber einen etwas hohen Widerstand 27-60 kOhm bei 10 Lux Nr. 1762890 hat 700 Ohm bei hundert Fußkerzen ("ftc") was auch immer das bedeutet. https://de.wikipedia.org/wiki/Foot-candle 1 fc = 1 ftc = 1 lm/ft2 = 10,76391 lx also 100 ftc= 1000 Lux, beide stammen vom selben Hersteller in USA. Kann der seine Produkte nicht gleich angeben?
Patrick C. schrieb: > Kannst du bitte etwas mehr erzaehlen uber der Robot (fotos?). > Wie grosz ist er, welche Motoren werden benutzt ? > Musz da keine positionsruckmeldung benutzt werden ? Es ist ein Mitsubishi Movemaster EX RV-M1. Die Motoren werden alle mit 24V betrieben und haben eine Stromaufnahme von max. 3A. Die Positionsgeber sind auf der Motorwelle mit drauf, also unabhängig vom Motor. Das läuft aber alles.
Ich habe folgendes Bauteil gefunden: https://www.analog.com/en/products/ltc6992-1.html Damit kann ich wenigstens 0-1V benutzen. Der Rest meiner Analogen Ausgangskarte ist dann zwar verschwendet aber ist dann so... Ich weiß nur nicht wo ich den LTC6992 "dazwischen klemmen" muss...
H. H. schrieb: > Dieses Modul hat einen 0-5V Eingang, für 0-10V also nur ein > Spannungsteiler nötig. > > https://www.ebay.de/itm/112869818416 Das habe ich jetzt erst gesehen. Das ist ja quasi genau das was ich brauche, leider mit einer zu großen Lieferzeit ^^
https://web.archive.org/web/20100414140249/www.roboex.com/rv-m1.PDF Das Handbuch zum Roboter. Hier verlinkt: https://retrocomputing.stackexchange.com/questions/11532/what-kind-of-cable-do-i-need-to-connect-a-movemaster-ex-rv-m1-robotic-arm-to-a-p noch ein paar Bilder https://github.com/Springwald/Movemaster-RV-M1-Library https://learn-cnc.com/robot-arm-part-1-mitsubishi-movemaster-rv-m1-setup/ Normalerweise wurde er über serielle oder parallele Schnittstelle angesteuert, mit ASCII-Befehlen. Ist das alles abgeschaltet und jetzt direkt angesteuert?
Das Handbuch und die Bilder kenne ich schon. Das Problem ist, dass die Originale Steuerung vom Roboter kaputt (gemacht wurde?) ist. Ich weiß leider nicht was damit geschehen ist. Unser Lehrer möchte das wir irgendwie die Motoren mit unseren Beckhoff Klemmen ansteuern. (Arduino und Rasberry sind ausgeschlossen)
Angehängte Dateien:
-

Robot-247.png
31 KB -

Robot-248.png
33 KB -

Robot-249.png
27 KB -

Robot-250.png
32 KB
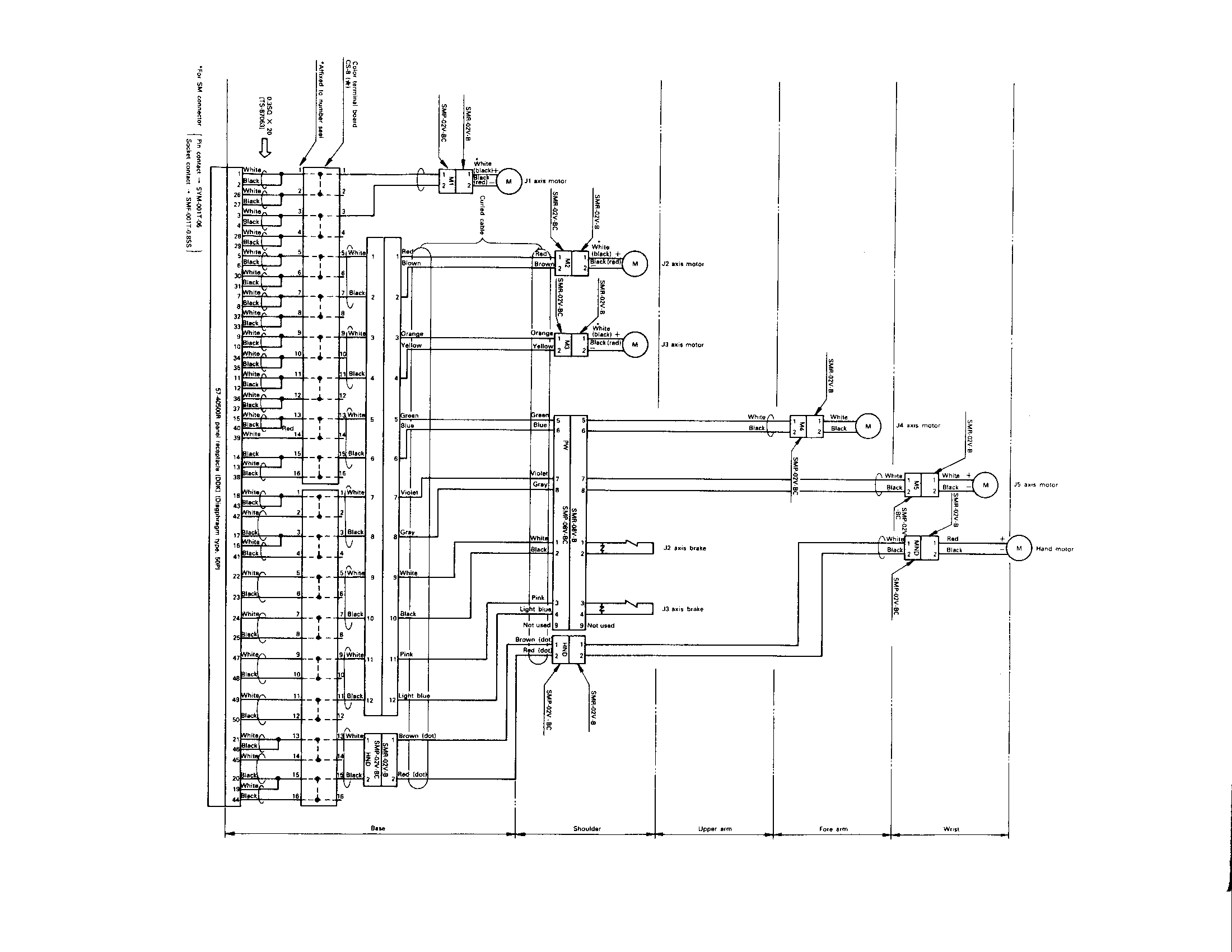
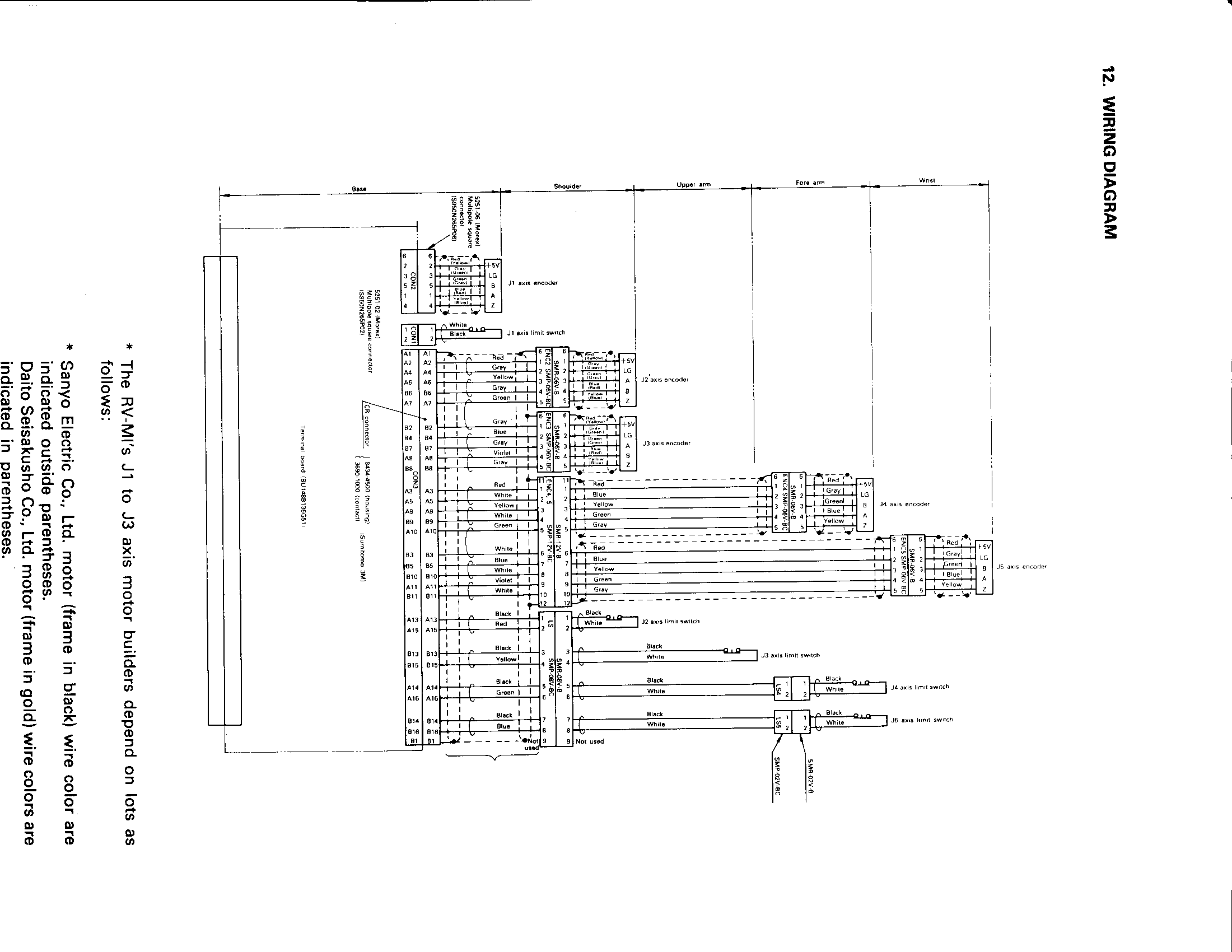
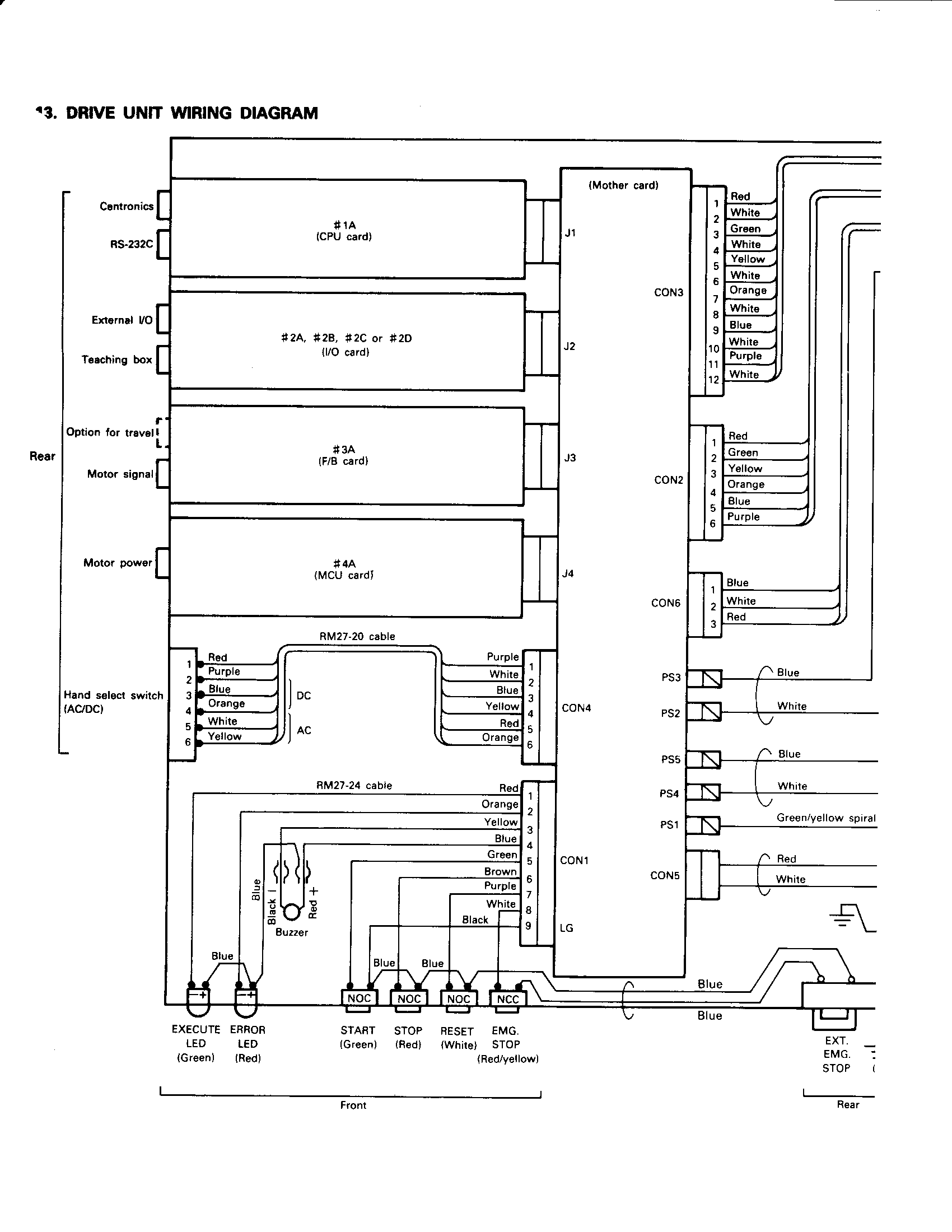

Wieviel von der alten Elektronik ist überhaupt noch funktionsfähig? Aus dem Handbuch die vier Seiten mit Schaltplänen habe ich aus dem PDF extrahiert. Die Motoren und Encoder sind elektrisch nicht irgendwie verbunden, und liegen auf unterschiedlichen Steckern. Läßt sich das Original nicht mehr retten?
Angehängte Dateien:
-

Robot-022.png
32 KB -

Robot-025.png
30 KB
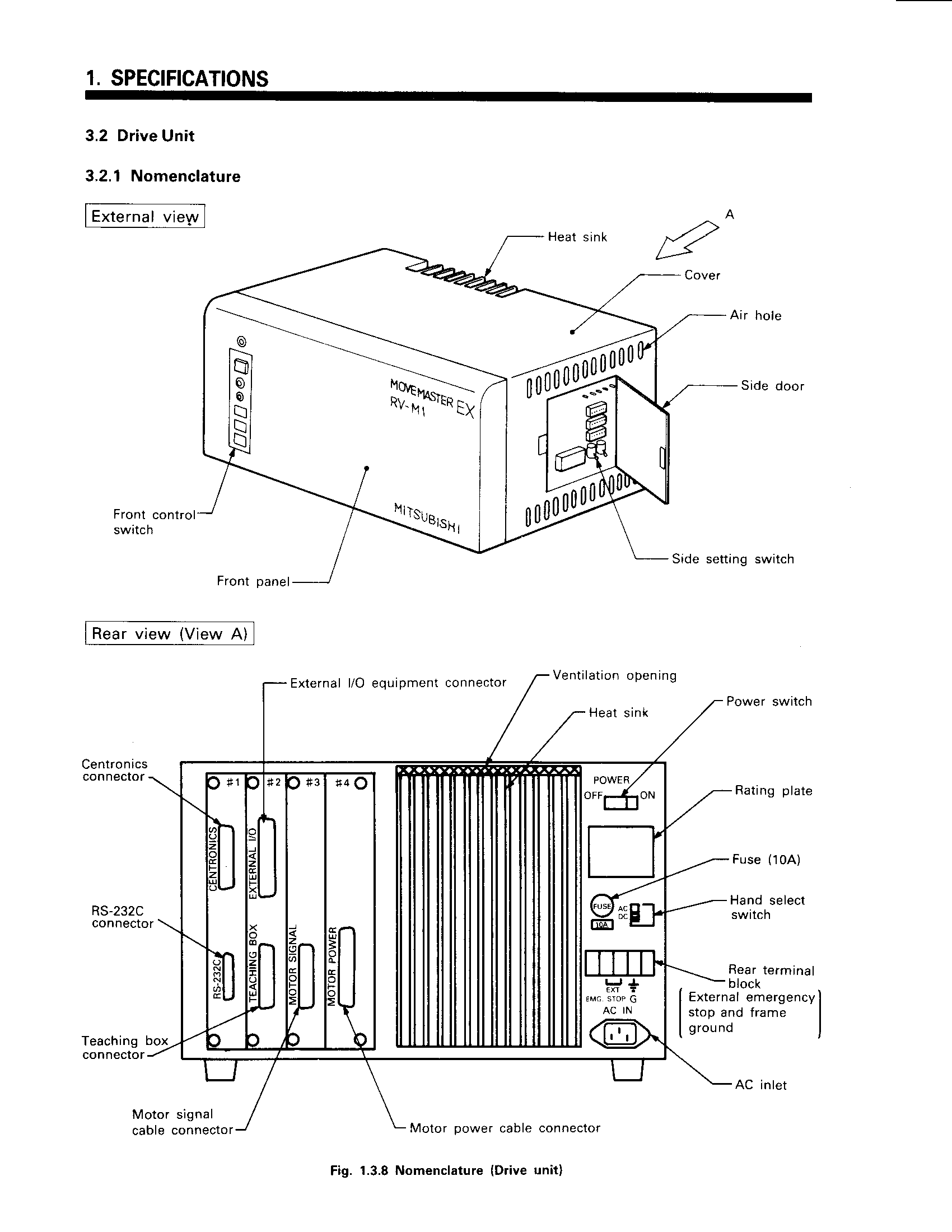
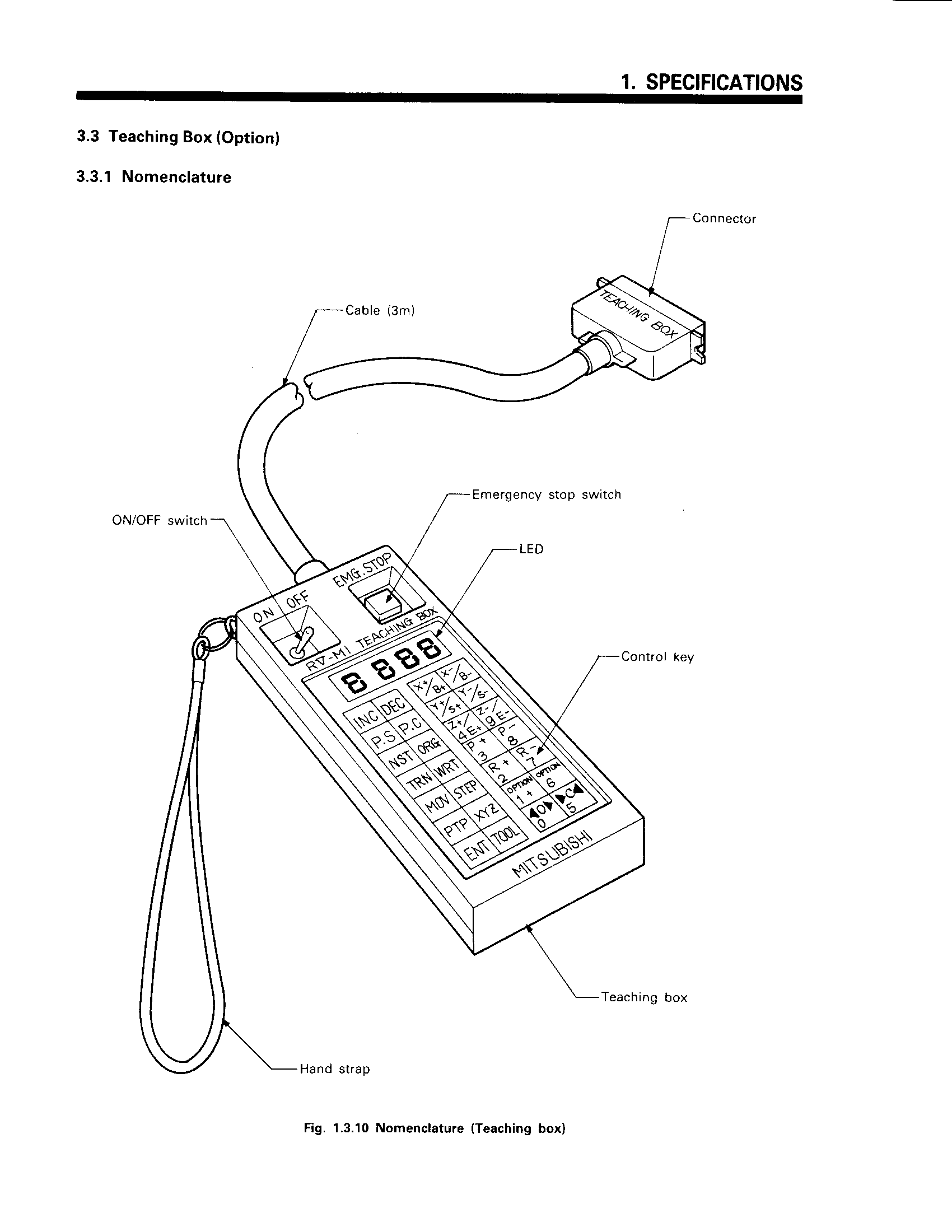
Die Elektronik war in einem Gehäuse untergebracht, dazu gab es noch die optinale Teaching box. So ein DC-Motor läuft weiter solange Spannung ansteht. Fünf Endschalter sollen wenigstens das schlimmste verhindern, sind die schon in der neuen Schaltung benutzt? Ein Roboter darf auch keine Überschwinger machen, also muss die Software aus den Positionssignalen wissen, wann sie rechtzeitig abbremsen muss. Ein sehr ambitioniertes Projekt.
Christoph db1uq K. schrieb: > Wieviel von der alten Elektronik ist überhaupt noch funktionsfähig? Die wurde weg geworfen... Warum auch immer... Das Projekt soll auch gar nicht sooo doll druchdacht werden. Es reicht völlig aus wenn man die Motoren simpel abschaltet. Zumal an den Achsen Bremsen sind (die können ganz einfach angesteuert werden mit einem 24V Signal). Also wenn ich dem Motor und der Bremse die Spannung wegnehme, dann hält er schon rechtzeitig an. Und die Positionsberechnung soll auch seeeehr Simpel gehalten werden. Keine inverse Kinematik. Ganz einfacher Ist- und Sollwert Vergleich. Es ist "nur" ein Techniker-Projekt für zwischendurch. Es gibt ne kleine Note und das wars :D Aber wenn wir nichts zustande bringen wird es halt ne 6 :D
Christoph db1uq K. schrieb: > So ein DC-Motor läuft weiter solange Spannung ansteht. Fünf Endschalter > sollen wenigstens das schlimmste verhindern, sind die schon in der neuen > Schaltung benutzt? Damit der Roboter nicht zu weit fährt habe ich im Programm großzügige Software Endschalter programmiert. Dann kann er noch ein bisschen nachlaufen, wobei das bei unseren Tests nie passiert ist.
Das heißt auch die Netzteile sind weg? Alles neu machen. Immer weg mit dem alten Glump. Die Beckhoff-Elektronik liefert positive und negative Gleichspannungen. Die Motoren brauchen auch beide Polaritäten für vorwärts und Rückwärtslauf. Die PWM-Schaltung dazwischen, egal ob NE555 oder der LTC6992, kann aber erst mal nur schneller und langsamer drehen lassen. Daher mein Vorschlag mit dem Relais zum Umpolen. Oder eben irgendeine H-Brückenschaltung.
Die PWM Controller (welche ja leider ungeeignet sind) können ja die Drehrichtung ändern. Ich muss jetzt nur noch das Analoge Signal umwandeln. Oder einen geeigneten Controller finden ^^ Wenn ich einen Controller mit nur einer Richtung bekomme, dann mache ich das vermutlich über Relais oder Transistoren.
Angehängte Dateien:
-

AaNtS.png
12 KB
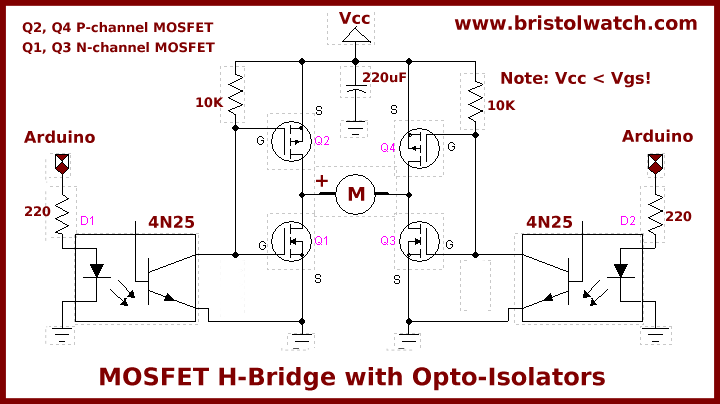
Ich muss das Thema nochmal aufgreifen. Ich hoffe es ließt noch jemand mit. Ich habe bei Amazon jetzt folgendes Board 6x gekauft: https://www.amazon.de/gp/product/B00LODGSYO/ref=ppx_yo_dt_b_asin_title_o04_s00?ie=UTF8&psc=1 Dort habe ich das Poti abgeschnitten und gehe mit meinen 0-10V auf Eingänge (also natürlich stelle ich nicht mehr als 5V ein). Das Funktioniert einwandfrei. Genau so wie ich es mir vorgestellt habe. Aber wie ihr bestimmt schon erkannt habt, kann ich die Drehrichtung nicht einstellen. Deshalb habe ich mir folgende H-Brücken Schaltung im Internet rausgesucht, die nur ein bisschen angepasst werden muss (siehe Bild). Der Plan war, mit der Variablen Spannung die vom "Amazon" Board kommt auf die H-Brücke zu gehen. Meine Fragen wären: Brauche ich Schutzdioden für die Mosfets (wird häufig erwähnt)? Reicht es wenn ich die "Opto Isolators" gegen normale Transistoren tausche und einen Widerstand davor schalte der von meinen 24V Digitalausgang der Beckhoff Klemme 23,3V aufhält (die Spannung ist ja vermutlich abhängig vom Transistor). Und brauche ich diesen Kondensator der ganz oben im Bild zu sehen ist?
Beitrag #7019267 wurde von einem Moderator gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.