Hallo miteinander
Ich habe schon vor einiger Zeit wegen eines Projektes hier nachgefragt,
habe die Sache aber dann, weil zu kompliziert, verworfen.
Mein Leidensdruck erhöht sich aber in einer Geschwindigkeit, die mich
dazu zwingt, die Sache wieder aufzunehmen.
Ich bin gehbehindert, sitze also in einem Rollstuhl. Für Draußen habe
ich einen elektrischen und der erfordert bei der Steuerung enorm viel
Konzentration. Ich möchte das ‚Handling‘ daher etwas auslagern
(Sprachsteuerung, Autopilot?) und möchte daher folgende Modifikation
vornehmen.
Ich hatte die Sicherheitsaspekte bei meinen ersten Gedanken einfach
unterschätzt. Jetzt habe ich mir folgendes ausgedacht.
Der Hersteller meines Rollstuhls kann mir leider nicht mehr helfen. Die
Mitarbeiter, die das Ding irgendwann entwickelten sind schon alle tot
oder nicht mehr in der Firma. Es handelt sich um ein CAN-Bus gesteuertes
Gerät mit einem HAL-Joystick (grob gesagt).
——————
Ich möchte die Ausgaben des Joysticks von einem ESP32 simulieren lassen.
Meine Frage:
Habe ich hier vielleicht einen Denkfehler?
Vorgehen:
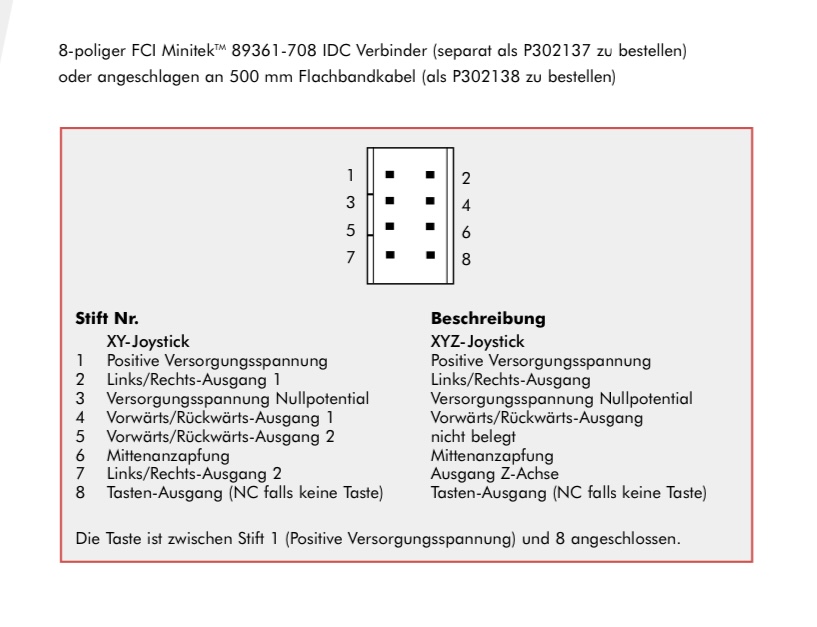
Es gibt einen Kippschalter, der die Versorgungsspannung entweder zum
Joystick oder zum ESP lenkt. Nach dem Umschalten zum ESP schaltet ein
Relais (Dauer 2 Sekunden) und legt die Mittenanzapfung Pin 6 (2,5V) auf
die Pins: 2, 4, 5, 7. Das bedeutet einfach Nullstellung des Joysticks.
Nach den 2 Sekunden fällt das Relais wieder ab und der ESP, der
zwischenzeitlich gestartet hat, übernimmt. (Legt also erstmal auch (über
PWM) 2,5V an 2, 4, 5, 7. Jetzt passiert programmgesteuert irgendwas
(Randsteinverfolgung, Sprachgesteuertes???). Stimmt ja so, oder:
Spannungen unter 2,5 Volt an 2, 7 lenkt nach links und Spannungen
darüber (bis 5V) lenken nach Rechts. Das Gleiche Spiel an den Pins 4, 5
für Vor/Zurück.
Am ESP32 wird ein Watchdog programmiert, der bei der kleinsten
Unregelmäßigkeit (ESP hängt sich auf oder so) einen Neustart verursacht.
Nach dem Neustart schaltet sofort das Relais wieder und simuliert
dadurch die Joystick-Nullstellung. Danach übernimmt wieder der ESP.
Ich lasse das Ding auch pfeifen, damit ich rasch den Kippschalter zum
Joystick hin schalten kann, wenn nötig.
————————-
Das ist sicher kein Serientaugliches Prinzip aber ich möchte das auf
Strecken, die ungefährlich sind nutzen um mir die Gegend anzuschauen und
mich nicht auf die permanente, mikrometergenaue Steuerung des Joysticks
konzentrieren müssen.
******** Ich höre schon schimpfende Stimmen. Dazu möchte ich sagen: Ich
leben nicht in einer Großstadt sondern am Land. Viel Natur, einsame
(elendslange, hauptsächlich gerade) Spazierwege überall.
Es würde mich sehr freuen, wenn Jemand einen Blick auf mein Vorhaben
werfen würde. Es geht mehr darum zu erfahren, ob ich das Prinzip
technisch verstanden hab‘. Punkto Sicherheit werden mir selbst gewiss
noch einige Sachen einfallen. Tipps dazu suche ich also weniger, als
Bestätigungen für mein technisches Vorgehen. Bin ja unbedarft in solchen
Sachen und ein HAL-Joystick ist, aus dieser Sicht zumindest, völlig neu
in meiner Welt.
Ich bedanke mich herzlich für kreative, sachliche Antworten und
Beteiligungen.
Vielen Dank
Emanuel
Wenn der Joystick wirklich so überempfindlich ist, lohnt es sich, über
eine Dehnung des Bereiches um die Nullstellung nachzudenken. Dann lässt
er sich im unteren Geschwindigkeitsbereich und bei leichten Kurven
feinfühliger steuern.
Sprachsteuerung und Autopilot wirst du nicht hinkriegen, weil da enorm
viel Sensorinput und KI nötig wird.
Ist es sicher dass der Joystick Schalter hat, oder ist es, wie ich eher
erwarten würde, ein analoger Joystick?
Der E-Rolli eines Freundes vor 25Jahre hatte bereits einen analogen
Joystick.
Gruß
Anselm
Anselm schrieb:> Ist es sicher dass der Joystick Schalter hat, oder ist es, wie ich eher> erwarten würde, ein analoger Joystick?
Im Titel steht etwas von Hall ...
Vielen Dank für die Antworten
@Andreas:
Ja in den CAN-Bus rein denken, kommt mir jetzt sehr aufwändig vor.
Leider gibt es vom Hersteller keine Informationen mehr.
@Mathias:
Ja, Anpassungen dieser Art habe ich schon probiert. Leider konnte ich
keine befriedigende Lösung finden. - Wegen der Sensoren: Mein Telefon
(obwohl schon mind. 3 Jahre alt) hat so viele Sensoren und einen so
tollen Prozessor (hat mehr Kerne, als ich Finger an einer Hand). Hat
eine Kamera, die den Randstein filmen und auch irgendwie erkennen kann.
Bei Allem gilt natürlich: Beim geringsten Zweifel: HALT/STOP. Es geht
aber auch nicht um wahnsinnige Geschwindigkeiten und die Szene spielt
(falls überhaupt irgendwann) in freier Natur.
@Anselm:
Es hat einen Hall - Joystick. Also magnetisch (hatte es falsch
formuliert). Den Schalter werde erst ich einbauen.
——————————————
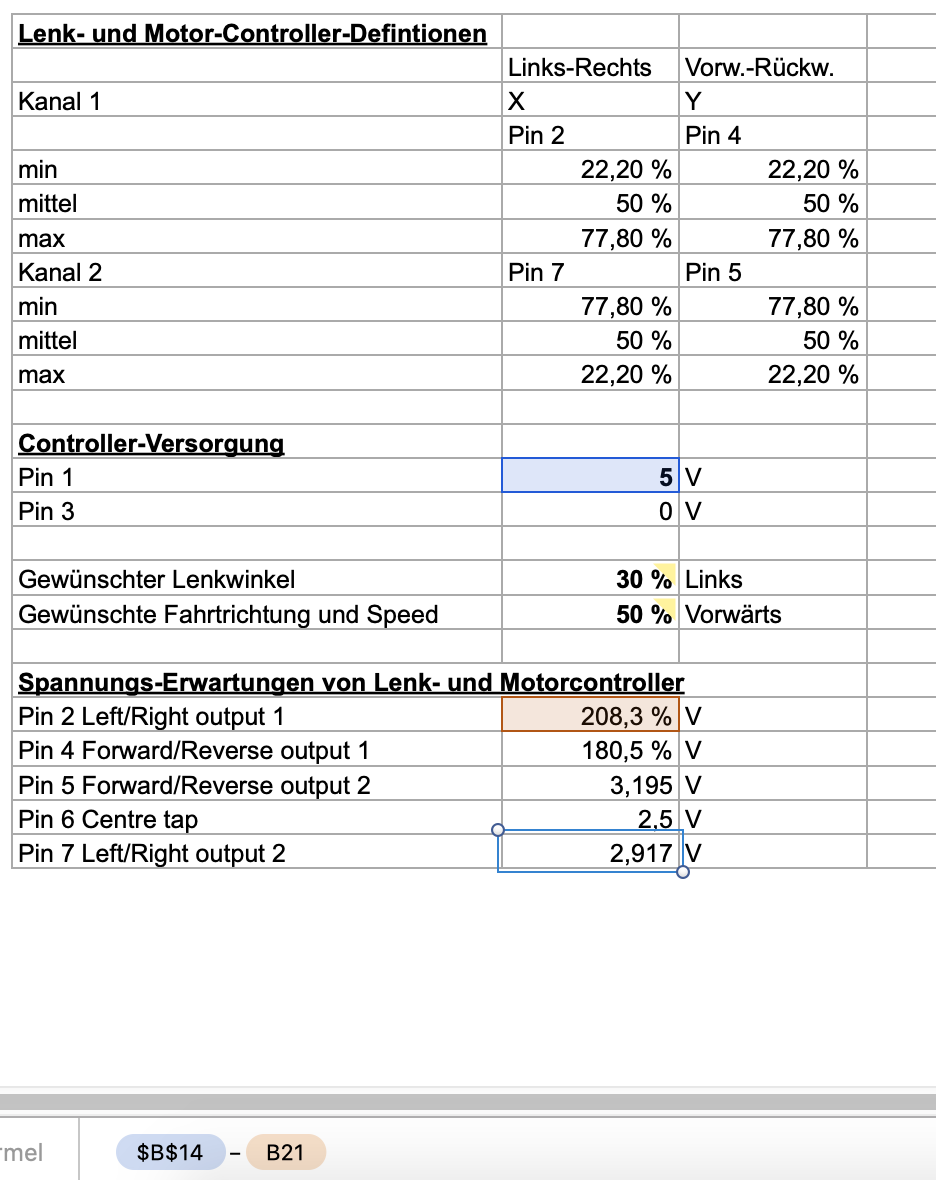
Ich habe nachgesehen: Ich habe hier vor etwa einem Jahr angefragt. Da
gab es jemanden, der echt so nett war, dass er mir ein Excel zukommen
ließ. Das ist so derartig kompliziert, dass ich es bis heute nicht
verstehe. Besonders eben der Ausdruck: (siehe angehängtes Foto) 5
- 208,3% = 2,917 (mein Sohn hat mir eben erklärt: 208,3% wird als 2,083
gerechnet (irgendwie verstehe ich dann doch). Ich muß also an PIN2 2,083
Volt anlegen. Wenn der nette Mensch, der mir das damals geschickt hat,
noch heute in dem Forum ‚wandelt‘, dann würde ich ihn gerne um
Bestätigung meiner Annahme bitten.
——————————-
Danke jedenfalls, für die Mühen
Emanuel
Emanuel schrieb:> Ich bin gehbehindert, sitze also in einem Rollstuhl. Für Draußen habe> ich einen elektrischen und der erfordert bei der Steuerung enorm viel> Konzentration.
Was bedeutet das GENAU? Was braucht bei so einer Steuerung "enorm viel
Konzentration"? Da gibt es doch nur vorwärts, rückwärts links/rechts?
Ist die Steuerung zu empfindlich? Zu hakelig? Zu schnell?
> Ich möchte das ‚Handling‘ daher etwas auslagern> (Sprachsteuerung, Autopilot?)
Träumerei. Sowas braucht ein Kaliber an Know How und
Entwikclungsaufwand, das du nicht mal ansatzweise leisten kannst.
> und möchte daher folgende Modifikation> vornehmen.
Naja, deine Vorstellung ist etwas naiv. Relais braucht man da eher
nicht.
>Am ESP32 wird ein Watchdog programmiert, der bei der kleinsten>Unregelmäßigkeit (ESP hängt sich auf oder so) einen Neustart verursacht.>Nach dem Neustart schaltet sofort das Relais wieder und simuliert>dadurch die Joystick-Nullstellung. Danach übernimmt wieder der ESP.
Naja, du gehst schon mit einer Murkseinstellung an die Sache ran. wenn
gleich das keine Raketentechnologie ist, kriegt man sowas schon so
stabil hin, daß ein Watchdog eher überflüssig ist.
>Ich lasse das Ding auch pfeifen, damit ich rasch den Kippschalter zum>Joystick hin schalten kann, wenn nötig.
Hä?
Man kann hier schon einiges machen. Sei es, den Joystick handhabbarer
und weniger hakelig/empfindlich zu machen oder einen einfachen
"Autopilot", er einfach eine konstante Geschwindigkeit bei
Geradeausfahrt macht. Ein Controller kann dabei helfen, wenn gleich so
ein ESP dafür massiv überdimensioniert ist. Aber was solls, ist egal,
ist nur ein Einzelstück und das Ding kostet nix.
Wenn ich die Schnittstelle richtig verstehe, braucht man nur 2 DACs,
welche 0-5V ausgeben, wobei halt 2,5V die Mittelstellung ist. Die
Intelligenz im Controller übersetzt zwischen dem echten Joystick und dem
Interface + noch ein paar Schalter für Autopilot etc.
Alles in Allem ist das nicht so schwer. Der Hauptaufwand wird beim
Testen und Anpassen liegen, damit das rauskommt, was du brauchst und was
ergonomisch ist.
Emanuel schrieb:> Hat> eine Kamera, die den Randstein filmen und auch irgendwie erkennen kann.
Das kann sicher sein, aber du kommst an diese Daten nicht ran, genauso
wenig wie an die Gesichtererkennung der Kamera oder ihren Autofocus.
NVidia arbeitet seit vielen Jahren an Autopiloten für autonomes Fahren,
aber die Boards dafür sind immer noch so gross wie ein Mini-ATX und
verbrauchen richtig Strom. Dazu kommen Umgebungssensoren aller Art und
Menge.
Schon ein einfacher Tempomat erfordert, das du die Geschwindigkeit des
Rolli misst und das rückkoppelst auf die Joystick Y-Achse. Und er muss
sich abschalten, sobald du am Joystick eingreifst.
Emanuel schrieb:> Ich möchte die Ausgaben des Joysticks von einem ESP32 simulieren lassen.
Aha.
> Es gibt einen Kippschalter, der die Versorgungsspannung entweder zum> Joystick oder zum ESP lenkt. Nach dem Umschalten zum ESP schaltet ein> Relais (Dauer 2 Sekunden) und legt die Mittenanzapfung Pin 6 (2,5V) auf> die Pins: 2, 4, 5, 7. Das bedeutet einfach Nullstellung des Joysticks.> Nach den 2 Sekunden fällt das Relais wieder ab und der ESP, der> zwischenzeitlich gestartet hat, übernimmt. (Legt also erstmal auch (über> PWM) 2,5V an 2, 4, 5, 7. Jetzt passiert programmgesteuert irgendwas> (Randsteinverfolgung, Sprachgesteuertes???). Stimmt ja so, oder:> Spannungen unter 2,5 Volt an 2, 7 lenkt nach links und Spannungen> darüber (bis 5V) lenken nach Rechts. Das Gleiche Spiel an den Pins 4, 5> für Vor/Zurück.
Die Kanäle für links/rechts und für vor/zurück laufen gegensinnig, aus
Sicherheitsgründen. Wenn Du auf Pin 2 2.5+1V gibst, musst Du auf 4
2.5-1V geben, damit die Steuerung das akzeptiert. So habe ich die
Beschreibung verstanden.
Versorgungsspannungen schalten ist ungünstig. Praktisch jeder digitaler
Schaltkreis verträgt an seinen Eingängen nur Signale von VSS(GND) bis
VDD(Versorgungsspannung), wenn es nicht ganz ausdrücklich anders im
Datenblatt drinsteht. Wenn Du die Versorgung abschaltest, müssen alle
Eingänge auf 0V sein. Ist doof.
> Am ESP32 wird ein Watchdog programmiert
Programmieren ist doof. Bei einem Sicherheitsfeature willst Du das in
Hardware machen. z.B. damit:
https://assets.nexperia.com/documents/data-sheet/74LVC1G123.pdf
Der schaltet seinen Ausgang für eine begrenzte Zeit (!, durch ein
R-C-Glied festgelegt) ein, wenn er einen Pegelwechsel am Eingang sieht.
Wenn der ausbleibt, schaltet er nach der konfigurierten Zeit ab, und
zwar zuverlässig und ohne das was programmiert werden muss oder kann.
Das kann man dann auch nicht umgehen.
Für die Ausgabe der Analogwerte wäre das eine Möglichkeit:
https://www.microchip.com/en-us/product/MCP48FVB24
Zum Umschalten zwischen Joystick und Deinem ESP wäre das hier geeignet:
https://www.analog.com/media/en/technical-documentation/data-sheets/ADG888.pdf
Dieser Chip ist ein Umschalter für 4 analoge Signale. Relais können mit
der Zeit Probleme bei geringen Strömen haben, die wollen oft einen
MinimalStrom auf den Kontakten haben, um Oxidschichten "freizubrennen".
Und zu Deinem ESP32: Für richtige Robotik-Projekte mit Sprachsteuerung
oder Kameraauswertung usw ist der viel zu schwach. Da nimmt man eher das
hier:
https://www.nvidia.com/de-de/autonomous-machines/embedded-systems/jetson-xavier-nx/
Da werkeln dann 6 ARM64 Kerne, eine dicke GPU und ein KI-Beschleuniger.
Das braucht man dann auch für solche Projekte.
Solltest Du jetzt meine Vorschläge nicht verstehen, hast Du eindeutig zu
wenig Know-How für Dein Projekt.
fchk
Vielen Dank an alle.
Vielen herzlichen Dank besonders an Frank K. (fchk).
Jetzt fliegt es auf: Mir fehlt es deutlich an Know-How.
War, bevor meine Krankheit das Arbeiten verhinderte, Programmierer.
Werde das wohl besser lieber sein lassen. Ich dachte mir gestern bei
einer Spazierfahrt: Das Ding funktioniert ja superzuverlässig. Seit über
10 Jahren schon. Ich sollte mit meinen Stümpergedanken und Lösungen
nicht herumwurschteln. Es geht ja um kein Kinderspiel dabei. Wenn ich,
wie ich es gerne tu‘, durch den Wald und auf den angrenzenden Berg fahr‘
sollte das Gerät nicht versagen. Ich kann nämlich nicht einfach
aufstehen und zu Fuß nach Hause gehen. Kann dann nur darauf hoffen,
Telefonempfang zu haben. Wenn nicht, dann fressen mich wohl die Wölfe
oder Bären, die es hier wirklich gibt.- Egal.
Einen Superprozessor hätte ich nicht gebraucht. Die Spracherkennung, den
Kompass, die Wegaufzeichnung, die Darstellung auf einer Landkarte, hätte
ich meinem Telefon überlassen. Es hätte einfach den Vor/Zurück-Wert bzw.
Links/Rechts-Wert an den ESP geschickt (Bluetooth). Das wäre die
einfachste Übung. Der ESP bräuchte nur die richtigen Spannungen an die
richtigen PINs legen. Aber auch da dachte ich zu blauäugig und es
leuchtet mir ein, was Frank K. (fchk) sagt: Die Versorgungsspannung
modulieren und als Signale verwenden wollen ist wohl
überdurchschnittlich dumm. Der DAC, der verlinkt wurde könnte das sicher
ernsthafter. Aber in den muß ich mich erst hinein denken.
Die Lösung: Nix machen. Nur kurze Strecken fahren. Nix herumbasteln. Zu
Hause sitzen und RTL schauen. ‚Deutschland sucht den Superstar‘ oder
(was sah ich da letztlich im Fernsehprogramm) ‚Tinderreisen‘.
Fazit: Ich gebe auf. Schade drum. Vielleicht geht es mir in einem Jahr
wieder derart auf die Nerven, dass mein Verlangen nach einer Lösung
wieder aufflammt.
Eine Fertige Lösung, die man kaufen kann, gibt es ja zumindest
ansatzweise meinen Vorstellungen entsprechend.
Das Nachfolgemodell von meinem ‚Renneisen‘ verfügt über eine R-Net
Steuerung und da kann man von Drittanbietern zumindest eine
Spurhalteeinheit anhängen. Supersauteuer (egal) aber für mich bietet es
zu wenig Einflußmöglichkeiten. „Das muß doch viel einfacher und besser
gehen!“ denke ich mir da.
Na jedenfalls: Vielen Dank für Eure Zeit, Eure Gedanken und Vorschläge.
Bin jetzt zumindest etwas schlauer geworden.
Liebe grüße aus Kärnten
Emanuel
 IMG_4777.jpg
(110 KB)
IMG_4777.jpg
(110 KB)