Hallo Zusammen, für ein Roboter Arm Lern-Projekt würde ich gerne 4 12V DC Bürsten Getriebemotoren verbauen. Die Bezugsquelle des Motors ist https://www.robotshop.com/eu/en/12v-dc-motor-251rpm-encoder.html Der Motor hat einen Hall Encoder. Für Arduino finde ich Controller die 4 Motoren gleichzeitig ansteuern können allerdings für Schritt-Motoren bei CNC Projekten. Nach was müsste ich bitte suchen um einen passenden Controller zu finden für diese Motoren? Wird es auch Controller geben die den Encoder unterstützen oder müsste ich eher nach separate Bords dafür suchen? Die Leistung des Motors ist übrigens 12V 7A. Auf der gleichen Seite habe ich einen single Motor-Driver gefunden der passen könnte. Allerdings hat er keinen Anschluss für den Encoder. https://www.robotshop.com/eu/en/cytron-10a-dc-motor-driver-arduino-shield.html Das Gebiet ist noch neu für mich. Wie ist das Konzept generell: Gibt es Controller mit integrierte oder aufsteckbare Motor-Driver haben? Und wie ist es mit den Encoder, müssen diese auf dem Motor-Driver sein oder auf dem Controller? Nach was müsste ich bitte suchen damit ich mich darüber belesen kann? Gruß Kostas
Ich würde erstmal damit anfangen. https://maker.pro/arduino/tutorial/how-to-use-a-hall-effect-sensor-with-arduino Dann würde ich damit weitermachen https://www.aeq-web.com/arduino-mosfet-h-bruecke-dc-motor-steuern-mit-drehrichtung-und-geschwindigkeit-vierquadrantensteller/ Dann hast du einen einstieg. Gruß Bernd
Hallo Bernd, vielen lieben Dank für die Links. Die werde ich mir durchlesen und sicherlich danach einen besseren Überblick bekommen was Sache ist. Nur als Hinweis, ich habe nicht vor die Boards selbst zu bauen da mir die entsprechenden Kenntnisse fehlen. Ich muss also auf fertige Module zurückgreifen. Gruß KOstas
Angehängte Dateien:
Hallo Kostas Die wirst du günstig nicht finden. Das sind dann Servo Leistungsteile für den Industriebereich wobei nicht mit den billigen Hall Encodern gearbeitet wird. Diese geben dir im Betrieb eine durchgereichte aufgearbeitete Stellung des Rotors durch die du weiter verarbeiten musst und werden z.B.durch +-0-10V je nach Drehrichtung und Geschwindigkeit gesteuert. PS Kennst du Linuxcnc?. Das kann wohl auch Roboter und 6 Achsen
Angehängte Dateien:
-

2022-07-14_153102.png
210 KB
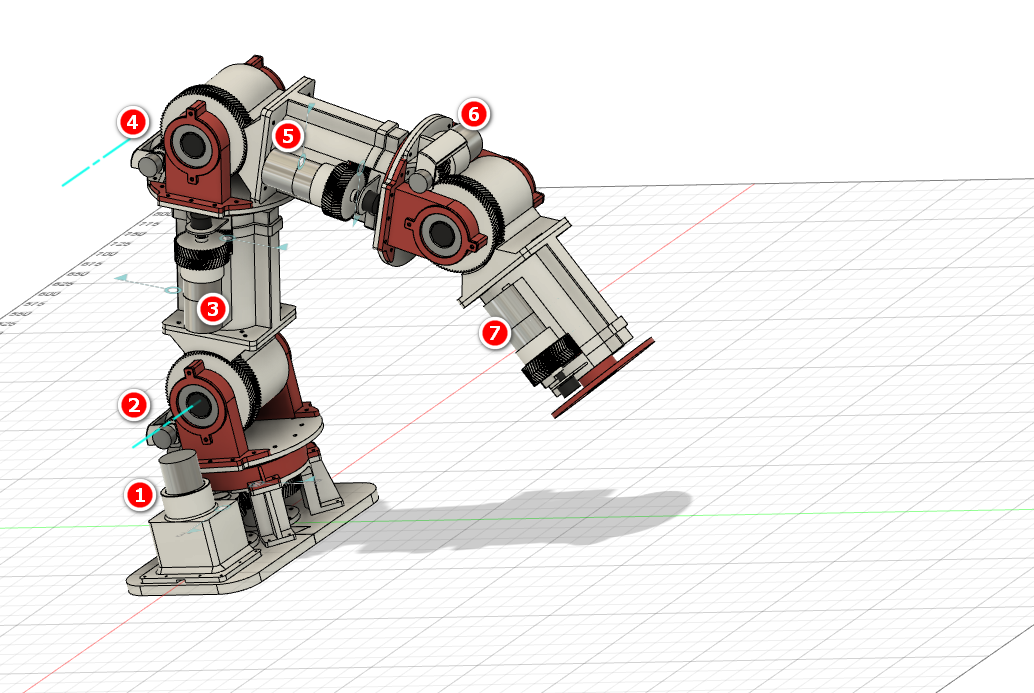
Hallo Bernd, oh, das hört sich nicht gut an. Sind Schrittmotoren besser geeignet? Zumindest habe ich dafür komplette Bausätze gesehen mit 4 Motoren. Die Motoren passen allerdings von der Bauform nicht so gut für das Projekt. https://de.banggood.com/TWO-TREES-CNC-Shield-+-UNO-R3-Board-+4x-A4988-Stepper-Motor-Driver-+4x-4401-Stepper-Motor-Kit-for-3D-Printer-p-1510212.html?utm_source=googleshopping&utm_medium=cpc_organic&gmcCountry=DE&utm_content=minha&utm_campaign=aceng-pmax-deg-de-pc¤cy=EUR&cur_warehouse=CN&createTmp=1&utm_source=googleshopping&utm_medium=cpc_eu&utm_content=dcr&utm_campaign=aceng-ssc-deg-all-0928&ad_id=&gclid=CjwKCAjw_b6WBhAQEiwAp4HyIJhKzv8b8eh68PWkcyjAvLPvZqR0iTSugtNbaEAA1ZANZwMNodBujRoCFfoQAvD_BwE [Edit] Im Bild ist ein Roboterarm als open source Projekt mit 7 Achsen zu sehen. Auf dieser Basis möchte ich eine Version mit 4 Achsen konstruieren Die 4-Kantigen Schrittmotoren würden hierzu nicht passen, außer ich würde das Design komplett anders umsetzen. Gruß Kostas
Kostas V. schrieb: > Wie ist das Konzept generell: Gibt es > Controller mit integrierte oder aufsteckbare Motor-Driver haben? > Und wie ist es mit den Encoder, müssen diese auf dem Motor-Driver sein > oder auf dem Controller? Klar, in der Welt der Elektronik ist alles steckbar. Wie bei Lego. Aufstecken und loslegen. Und die lib zaubert sich her schreibt den ganzen Code für dich. Und jetzt aufwachen. Ohne Skill gehts halt nicht.
Hallo Cyblord, ich kann absolut nachvollziehen was du meinst und du hast sicherlich recht. Mein Schwerpunkt ist allerdings nicht die Steuerung sondern die Mechanik. Wenn ich allerdings einen passenden Bausatz finde mit Motoren die für mein Projekt geeignet sind und den Passenden Controller und Motortreiber für Arduino oder Rasperry Pi wäre das natürlich wirklich perfekt. Das alles im Hobby Bereich! Gruß Kostas
Kostas V. schrieb: > Auf der gleichen Seite habe ich einen single Motor-Driver gefunden der > passen könnte. Allerdings hat er keinen Anschluss für den Encoder. Für den Encoder brauchst du nur zwei digitale Eingänge direkt am Mikrocontroller. Dein Händler hat im Angebot ein PDF verlinkt, wo er zeigt, wie man in anschließt: https://www.robotshop.com/media/files/pdf2/074-rb-dfr-444.pdf Falls du noch nach anderen Motortreiber Ausschau halten möchtest, benutze alternativ zu "Motor Driver" auch das Suchwort "H-Brücke" bzw. H-Bridge". Manche enthalten Zähler mit "Direction" und Step" Eingängen, die wäre nicht geeignet. Du brauchst welche, die das Signal vom Mikrocontroller lediglich "dumm" verstärken und ansonsten 1:1 an den Motor weiter reichen. Denke daran, dass der Motor beim Anlaufen die vollen 7A aufnimmt. Dein Treiber muss das zumindest für ein paar Sekunden aushalten.
Kostas V. schrieb: > ich kann absolut nachvollziehen was du meinst und du hast sicherlich > recht. Wahrscheinlich. Ich habe nämlich erschreckend oft recht. Ist ein Fluch. > Mein Schwerpunkt ist allerdings nicht die Steuerung sondern die > Mechanik. Mag sein. Nur für einen Roboterarm, braucht man 3 Dinge: Mechanik, Elektronik und Software. Und hat nur 1 von 3 wirds schwierig. > Wenn ich allerdings einen passenden Bausatz finde mit Motoren > die für mein Projekt geeignet sind und den Passenden Controller und > Motortreiber für Arduino oder Rasperry Pi wäre das natürlich wirklich > perfekt. Das alles im Hobby Bereich! Ja WENN. Wenn meine Tante Eier hätte wäre sie mein Onkel.
Hi Cyblord, sorry, hätte ich natürlich deutlicher schreiben sollen. Der Fokus liegt zunächst bei der Mechanik. Der Roboter wird Teil für Teil mit einem 3D-Drucker produziert. Alleine das ist schon eine Jahresaufgabe. Wenn ich die Motoren OHNE Steuerung also einfach über Schalter bediene ist das schon ausreichend. Die Idee dabei war, wenn ich gleich die richtige Motoren verbaue und ich jetzt schon den Controller und die Motortreiber habe, dann kann ich mich nach der Fertigstellung damit beschäftigen als Folgeaufgabe. Gruß Kostas
Hallo Stefan, Mein Händler hat auch einen Motortreiber für Bürstenmotoren DC 12V 10A. Allerdings wird der Encoder nicht berücksichtigt. Vermutlich ist das auch nicht die Aufgabe vom Motor Treiber. https://www.robotshop.com/eu/en/cytron-10a-dc-motor-driver-arduino-shield.html Noch eines zum Verständnis: Ist meine Annahme richtig dass ein Motor-Controller welcher mehrere Motor-Driver unterstützt, auch die Aufgabe der Positionierung mittels Encoders übernimmt. Der Arduino übergibt die Position an den Cotroller und dieser fährt die einzelne Motoren an? Gruß Kostas
Kostas V. schrieb: > Mein Händler hat auch einen Motortreiber für Bürstenmotoren DC 12V 10A. > Allerdings wird der Encoder nicht berücksichtigt. Vermutlich ist das > auch nicht die Aufgabe vom Motor Treiber. Eben! Der Encoder wird vom Motortreiber nicht benötigt, deswegen hat er keine Anschlüsse dafür. > Ist meine Annahme richtig dass ein Motor-Controller welcher > mehrere Motor-Driver unterstützt, auch die > Aufgabe der Positionierung mittels Encoders übernimmt. Solche Motor-Treiber gibt es, aber das ist ein Sonderfall. Solche Produkte kann man nicht einfach so als universelles Shield entwickeln, weil sie mindestens an Motor, Getriebe und Last angepasst sein müssen. Normalerweise ist die Positionierung die Aufgabe des Programmierers des Mikrocontrollers.
Kostas V. schrieb: > Noch eines zum Verständnis: Ist meine Annahme richtig dass ein > Motor-Controller welcher mehrere Motor-Driver unterstützt, auch die > Aufgabe der Positionierung mittels Encoders übernimmt. Der Arduino > übergibt die Position an den Cotroller und dieser fährt die einzelne > Motoren an? Ein Motortreiber dreht erst mal nur den Motor. Aber natürlich gibt es auch Module welche direkt eine Position anfahren können. Oder festgelegte Drehzahlen. Die man z.B. per I2C übermittelt. Sowas hatte ich mal verbaut. Du kannst dir da jede vorstellbare Abstufung kaufen. Also was soll das hier? Wenn du Motor und Encoder hast, dann kümmer dich später darum wie du das ansteuerst.
Hallo Zusammen, ok, herzlichen Dank. Dann werde ich die herausgesuchten Getriebemotoren in das Design verbauen und mich später für die Ansteuerung kümmern. Euch noch eine schöne Zeit. Gruß Kostas
Kostas V. schrieb: > für ein Roboter Arm Lern-Projekt würde ich gerne 4 12V DC Bürsten > Getriebemotoren verbauen. Die Motore sind für Bewegung geeignet. Bei einem Roboterarm wird sicherlich auch Kraft im Stillstand benötigt. Da das Getriebe (vermutlich) nicht blockierend wirkt, wirst Du damit wahrscheinlich nicht glücklich. Schrittmotore wären die einfachere Variante, BLDC wohl die beste und aufwendigste. Wenn es also nur um die Mechanik geht, würde ich passende Schrittmotore verwenden. Stefan ⛄ F. schrieb: > Denke daran, dass der Motor beim Anlaufen die vollen 7A aufnimmt. Dein > Treiber muss das zumindest für ein paar Sekunden aushalten. Die maximalen Ströme vermeidet man, indem man PWM-gesteuerte Rampen verwendet; allein schon, um Ruckeln zu vermeiden.
m.n. schrieb: > Wenn es also nur um die Mechanik geht, würde ich passende Schrittmotore > verwenden. Danke für die Info. Ich habe längst nach Schrittmotoren gesucht um im Kostenrahmen zu bleiben <100€/Motor, doch die sind alle ziemlich groß und schwer, zumindest habe ich keine andere gefunden. Die Motoren müssen auf den Gelenken sitzen. Dass Gewicht ist hierbei schon ein Thema. Ich benötige eine langsame Bewegung ca. 50U/min mit einer gewissen Kraft von ca. 2-5Kg Können Schrittmotoren bei langsamer Drehzahl auch diese Graft aufbringen oder sollte ich gleich nach Schrittmotoren mit Getriebe suchen? Auf jeden Fall gibt es deutlich mehr Controller für Schrittmotoren. Schöne Grüße Kostas
Kostas V. schrieb: > oder sollte ich gleich nach Schrittmotoren mit Getriebe suchen? Ohne Getriebe wird es mit keinem Motor funktionieren. Ich frage mich gerade, ob du jemals etwas mit Motoren gebaut hast? Du scheinst von ihnen wundersame Leistungen zu erwarten.
Angehängte Dateien:
-

2022-07-15_112056.png
120 KB
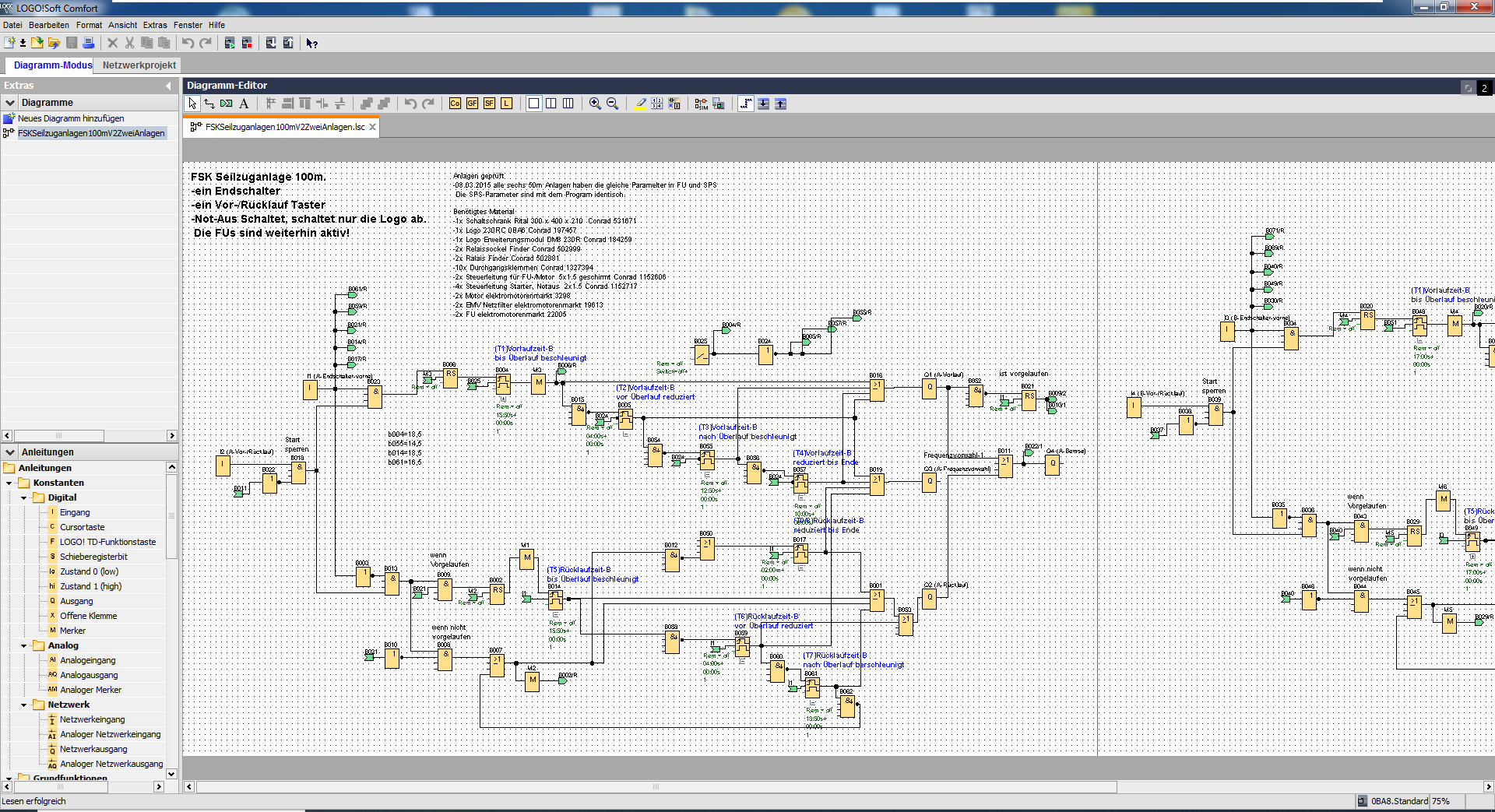
Hallo Stefan, vielen Dank für die Info. Ich werde nach Drehstrommotoren suchen mit Getriebe. Schneckenrad wäre am besten da es mechanisch blockierend wirken würde. Für dieses Projekt müsste es nicht einmal sein. Ich glaube ich habe bei meinem ersten posting bereits erwähnt dass dieses Gebiet komplett neu ist für mich. Ich habe bis jetzt nur mit Drehstrommotoren die über FUs <-> Siemens Logo angesteuert werden Projekte umgesetzt. Darum ging es mir, herauszufinden nach was ich suchen muss. Vielen Dank nochmals. Gruß Kostas
Kostas V. schrieb: > Schneckenrad wäre am besten da es mechanisch blockierend > wirken würde. Für dieses Projekt müsste es nicht einmal sein. Bist du dir da ganz sicher? Der Arm wird schon von seinem Eigengewicht herunter gezogen. Wer oder was wird dagegen arbeiten? Kann dein Motor im Stillstand die nötige mechanische Leistung abgeben, ohne dabei durch zu brennen?
Stefan ⛄ F. schrieb: > Kostas V. schrieb: >> Schneckenrad wäre am besten da es mechanisch blockierend >> wirken würde. Für dieses Projekt müsste es nicht einmal sein. > > Bist du dir da ganz sicher? Es ist eine grundlegende Eigenschaft von Schneckengetrieben, dass sie nicht von der Gegenseite her bewegt werden können.
Cyblord -. schrieb: > Es ist eine grundlegende Eigenschaft von Schneckengetrieben, dass sie > nicht von der Gegenseite her bewegt werden können. Genau. Aber meint ja, keins zu brauchen.
Hallo Zusammen, Wenn ich passende Schrittmotoren mit Schneckengetriebe finden würde die auch noch bezahlbar sind also <=100€/Motor dann würde ich die verwenden. Alle "günstige" Schrittmotoren die ich bisher gefunden habe sind richtige Bomber. Deshalb habe ich gesagt, für dieses Projekt ist das nicht unbedingt notwendig da hier die Mechanik in Verbindung mit 3D-Druck im Vordergrund steht. Wenn ich das Glück habe, passen Motoren zu finden, wäre das natürlich ein Traum da dieses Projekt einen weiteren Nutzen hätte. Dass es solche Motoren gibt ist mir schon klar. In jedem Diskettenlaufwerk steckt vermutlich so einer drin. Aber ich suche weiter. Ich bestelle mir übrigens parallel ein Arduino CNC Bausatz bei dem die Motoren NUR auf dem Tisch platziert werden also ohne mechanische Komponenten um auch hier Erfahrungen zu sammeln. Gruß Kostas
Kostas V. schrieb: > Alle "günstige" Schrittmotoren die ich bisher gefunden habe sind > richtige Bomber. Deshalb habe ich gesagt, für dieses Projekt ist das > nicht unbedingt notwendig Was ist das denn für eine Logik? Weil dir die richtigen Bauteile zu teuer sind glaubst du, sie nicht zu brauchen. Ich hoffe, du machst das ganz für dich alleine und musst es niemals jemandem vorzeigen.
Hallo Stefan, ich mache das für mich und muss das niemandem Zeigen. Ich kann für die Steuerung Komponenten von Backhoff für mehrere tausend Euro verwenden. Ist sicherlich auch ein guter Lerneffekt. Ich habe übrigens auch Projekte mit Backhoff Komponenten umgesetzt. :-) Aber irgendwo muss man schon eine Grenze setzen. Wie gesagt, ich habe bisher KEINE passende Motoren gefunden und das ich weiter suche. Das ist KEIN kommerzielles Projekt! Ich könnte auch Servomotoren aus dem Modelbau verwenden. Auch da bin ich auf der Suche. Ich komme aus dem Maschinenbau(Ausbildung als Feinmechaniker) und Windows individuelle Softwareentwicklung (Beruflich seit über 30 Jahren). Mir ist klar dass ich Schneckengetriebe brauche. Habe auch ein paar private Projekte mit µC umgesetzt. Mit Schrittmotoren, Arduino und co. hatte ich bisher keine Berührung. Von meinem Wissensstand her muss ich mich nicht verstecken. Ich habe auch kein Problem damit offen zu legen was ich nicht weiß. :-) Manchmal wird man als Dummer Junge hingestellt wenn man sich in einem Bereich nicht auskennt. Damit kann ich bestens umgehen. :-) Es gibt immer jemanden der sich in einem Thema besser auskennt als ich. Und es gibt Themen bei denen ich mich bessere auskenne, und egal wie viel Wissen man sich aneignet wird es immer so sein. :-) Gruß Kostas P.S. Dieser Thread ist mich mich sehr interessant. Ich weis jetzt in welcher Richtig ich suchen muss. Vielen Dank dafür.
Kostas V. schrieb: > Manchmal wird man als Dummer Junge hingestellt > wenn man sich in einem Bereich nicht auskennt. Für ein Projekt dieser Größe sollte man vorher schon Erfahrung mit einfacheren Aufbauten oder Bausätzen gemacht haben. Mache doch erst mal etwas kleineres!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.