Ich habe ein MeanWell BIC-2200 Netzteil das ich gerne per CANBus steuern
möchte. Die Spezifikation findet man hier:
https://www.meanwell.com/Upload/PDF/BIC-2200-E.pdf
Ich nutze einen RasPi mit Can/RS485 HAT von Waveshare und habe alles
soweit konfiguriert, dass ich mit cansend senden und per candump diese
Nachricht auch empfangen kann. Dieser Part scheint also zu
funktionieren.
Das CanHat ist mit 250000kbits konfiguriert und per Can_High und Can_low
sowei Ground_Aux mit den Netzteil verbunden.
Ich versuche nun seit längerem das Netzteil zu einer Antwort zu bewegen
aber nicht funktioniert.
Ich sende z.b. "cansend 000C0300#0000", um den Status abzufragen und
sollte eine Antwort mit vom Netzteil mit dem byte "01" erhalten, aber
nichts wird empfangen. Nur wiederrum die gesendete Nachricht.
Der Canbus ist beim Raspi mit 120ohm terminiert.
Hat einer von euch netten Menschen noch eine Idee?
Vielen Dank schonmal :)
Felix K. schrieb:> Das CanHat ist mit 250000kbits konfiguriert
Sicher nicht, denn das wären 250 Mbit ;-)
> und per Can_High und Can_low> sowei Ground_Aux mit den Netzteil verbunden.
OK
> Der Canbus ist beim Raspi mit 120ohm terminiert.> Hat einer von euch netten Menschen noch eine Idee?
Wie sieht das Signal auf dem Bus aus? Richtige Adresse beim Ansprechen
verwendet?
Felix K. schrieb:> Der Canbus ist beim Raspi mit 120ohm terminiert.
Der Widerstand zwischen CANH und CANL sollte 60 Ohm betragen. Fehlen die
120 Ohm am Netzteilende des Busses?
LG, Sebastian
Sebastian schrieb:> Der Widerstand zwischen CANH und CANL sollte 60 Ohm betragen.
Das stimmt, zum Test mit kurzem Kabel geht es aber auch mit 120 Ohm. Nur
ganz ohne Terminierung geht es nicht, denn der rezessive Pegel wird nur
dadurch hergestellt.
Felix K. schrieb:> Nur wiederrum die gesendete Nachricht.>
Du empfängst die gesendete Botschaft? Dann stimmt schon mal
grundsätzlich etwas nicht. Aus Versehen so eine Art loopback aktiviert?
Bei ausgeschaltetem Netzteil bekomme ich im Candump das gesendete nicht
zurück. Mittlerweile hab ich das Netzteil acuh zum Antworten bewegt.
Allerdings reagiert es komsicherweise nur auf ein Kommando:
und zwar auf
000C0300#0000
darauf bekomme ich zuerst zweimal meine anfrage zurück.
und dann bei jedem weiteren mal einmal die anfrage und die korrekt
Antwort mit 00 00 01 (Netzeil aktiv).
Hier der candump log:
1
can0000C0300[2]0000
2
can0000C0300[2]0000
3
4
can0000C0300[2]0000
5
can0000C0200[3]000001
6
7
can0000C0300[2]0000
8
can0000C0200[3]000001
9
10
can0000C0300[2]0000
11
can0000C0200[3]000001
Die Kommunikation funktioniert also grundsätzlichs, nur finde ich es
auch komisch dass ich immer die Anfrage zurück bekomme, vieleicht ein
Art Signalverstärker für nachfolgende Netzteile, weil man ja viele
Netzteile parallel und per Can dann in Reihe schalten kann... hmm
Loopback ist aus. Wenn das Netzteil aus ist, bekomme ich auch keinerlei
Reaktion in candump wenn ich etwas sende.
Jetzt nur das Problem: Kein anderes Kommando funktioniert.
cansend 000C0300#0062 sollte z.b. die Temperatur als Antwort
zurückbringen, es passiert aber nicht. Sondern etwas sehr komisches:
candump zeigt wie aus einer Art Zwischenspeicher folgendes:
1
can0000C0300[2]0062
2
can0000C0200[3]000001
3
4
can0000C0300[2]0062
5
can0000C0200[3]000001
6
7
can0000C0300[2]0062
8
can0000C0300[2]0062
zweimal die ANtwort auf eine vorhereige Anfrage und dann weider das
verhalten dass einfach wie beim Repeater das Originalkommando wiederholt
wird. Ich versteh das nicht :/
Ich rufe das can Interface mit
„Signalverstärker“ kann nicht sein, es dürfte kein zweiter Teilnehmer
einfach die Botschaft unter der gleichen ID noch einmal spiegeln. Das
müsste irgendwie aus dem lokalen System kommen. Ansonsten hast Du bei
dem 0x62 vermutlich Low- und High-Byte vertauscht, kann das sein?
Kommando 0x0062 ist auf dem CAN Bus 62 00
Harald A. schrieb:> Felix K. schrieb:>> Nur wiederrum die gesendete Nachricht.>>> Du empfängst die gesendete Botschaft? Dann stimmt schon mal> grundsätzlich etwas nicht.
Das kommt auf die Einstellung des CAN-Controllers an. Jeder
CAN-Controller liest beim Senden die gesendete Botschaft auch wieder
zurück. Das muss er schon alleine wegen der Arbitrierung tun. Je nach
Einstellung kommt die dann auch wieder als Empfangene Botschaft an oder
wird unterdrückt.
Felix K. schrieb:> Loopback ist aus. Wenn das Netzteil aus ist, bekomme ich auch keinerlei> Reaktion in candump wenn ich etwas sende.
Das sollte auch nicht funktionieren, weil dann keiner das Ack setzt.
Dann gilt die Botschaft als nicht erfolgreich gesendet.
> Ich rufe das can Interface mit> sudo ip link set can0 type can bitrate 250000> sudo ifconfig can0 up>> auf, also kein loopback.
Wo hast du es denn ausgeschaltet? Unter
https://docs.kernel.org/networking/can.html heißt es:
"The loopback functionality is enabled by default to reflect standard
networking behaviour for CAN applications. Due to some requests from the
RT-SocketCAN group the loopback optionally may be disabled for each
separate socket. See sockopts from the CAN RAW sockets in RAW Protocol
Sockets with can_filters (SOCK_RAW)."
Ich muss mich korrigieren, wenn ich mich richtig erinnere zeigt candump
auch die eigenen gesendeten Nachrichten.
EDIT: Zeitgleich mit der Antwort von Rolf
EDIT2: Der CAN Controller INTERN liest natürlich mit, CANSEND und
CANDUMP sind als Systemfunktionem aber nach meinem Verständnis nicht auf
der Ebene sondern bedienen den CAN Controller ja nur. Ich kann mich aber
erinnern, dass ich dieses Verhalten von candump schon einmal etwas
schräg fand.
Dann ist das ja schonmal normal, dass man die Nachrichten im Candump
sieht. wenn man loopback noch zusätzlich aktiviert, dass sehe ich die
Nachrichten auch wenn das Netzteil aus ist.
Komischweise funktioniert die Kommunikation, also die Antowrt auf diese
eine Nachricht, die funktioniert (000c0300#0000-->000c0200#000001), nur
ohne Terminale Wiederstände, was für mich keinen Sinn macht, da das
Raspi Bord angeblich keinen an Bord hat und in der SPezifiaktion vom
Netzteil dazu auch gar nichts gesagt wird. :/
Andererseits frage ich mich, wieso wenn eine Nachricht ein Ergbnis
bringt, alle anderen ins leere laufen und doppelt im Candump erscheinen.
Einmal wohl das selbst gesendete und das andere veilleucht die
Reflektion beim Netzteil, weil ohne Wiederstand :( .
Ich probiere mal paar andere wiederstände, irgendwas ist faul.
EDIT: Danke auf jeden fall schonmal für die Ideen.
EDIT2: Aha, ich messe im Pi-HAT einen wiedestand von 120 ohm, ist dort
also wohl schon auf der platine
Felix K. schrieb:> ohne Terminale Wiederstände, was für mich keinen Sinn macht, da das> Raspi Bord angeblich keinen an Bord hat und in der SPezifiaktion vom> Netzteil dazu auch gar nichts gesagt wird. :/
Standard ist bei CAN Teilnehmer kein integrierter Widerstand, man kann
als Hersteller ja nicht wissen, ob es das physikalische Ende des Busses
ist.
>> Andererseits frage ich mich, wieso wenn eine Nachricht ein Ergbnis> bringt, alle anderen ins leere laufen und doppelt im Candump erscheinen.> Einmal wohl das selbst gesendete und das andere veilleucht die> Reflektion beim Netzteil, weil ohne Wiederstand :( .> Ich probiere mal paar andere wiederstände, irgendwas ist faul.
Es gibt keine Reflektion von Nachrichten aufgrund eines falschen
Widerstandes. Das physikalisch offene Ende (die „Reflexion“) kann keine
Nachrichten speichern.
Andere Widerstände sind Blödsinn, bei ganz kurzen Kabeln kann es auch
mal ohne Widerstand funktionieren, ist aber eher ein Zufallsprodukt.
120Ohm an beiden Enden oder auch nur an einem Ende bei kurzen
Verbindungen sind absolut in Ordnung.
Harald A. schrieb:> Felix K. schrieb:>> ohne Terminale Wiederstände, was für mich keinen Sinn macht, da das>> Raspi Bord angeblich keinen an Bord hat und in der SPezifiaktion vom>> Netzteil dazu auch gar nichts gesagt wird. :/>> Standard ist bei CAN Teilnehmer kein integrierter Widerstand, man kann> als Hersteller ja nicht wissen, ob es das physikalische Ende des Busses> ist.
Es gibt auch welche mit schaltbaren Widerständen, entweder per Jumper
oder sogar per Software. Aber wenn im Handbuch nix dazu steht, würde ich
auch davon ausgehen, dass keiner da ist. Kann man aber einfach mit einem
Multimeter nachmessen.
> 120Ohm an beiden Enden oder auch nur an einem Ende bei kurzen> Verbindungen sind absolut in Ordnung.
Ja. Ganz ohne funktioniert es fast nie, bei zu vielen Widerstanden
gibt's irgendwann auch Probleme, weil die Last zu groß wird, aber
ansonsten ist CAN da sehr robust.
Oh mein gott,
vielen Dank.
Das macht natürlich Sinn. Ich habe keine Ahnung von CAN und scheitere an
solchen Basics. Das hat geklappt und erklärt auch warum 00 00 als
kommando funktioniert. Dass kann man ja drehen und wenden, wie man will
und es bleibt das selbe :)
Ich habe also Low und High Byte nicht richitg angeordnet ;)
Danke euch udn besonders dir, Harald!
Genau, das Netzteil hat keinen schaltbaren oder festen Wirderstand aber
beim Board habe ich mit Multimeter 120 gemessen, auch wenn ich auf der
Website von Waveshare zu diesem modell nix zu einem Widerstand finde.
Felix K. schrieb:> Genau, das Netzteil hat keinen schaltbaren oder festen Wirderstand aber> beim Board habe ich mit Multimeter 120 gemessen, auch wenn ich auf der> Website von Waveshare zu diesem modell nix zu einem Widerstand finde.
Bereits fest eingebauter Widerstand ist häufig bei RS485 oder CAN
Shields, die für „allgemeinen Experimentierbedarf“ entworfen wurden, der
Fall. Vermutlich wollen die Entwickler damit das Erfolgserlebnis für
Gelegenheitsuser erhöhen, die dem Widerstand nicht so viel Bedeutung
zumessen. Der Widerstand ist ja eben nicht nur ein reiner
Terminierungswiderstand sondern auch ein Arbeitswiderstand, damit sich
die Pegel am Bus überhaupt ausbilden können (wie Falk schon schrieb).
Jaja, ganz ohne Widerstand kann es auch funktionieren, aber nur in sehr
engen Grenzen.
Ein erfahrener Anwender erarbeitet sich die beste Lage der Widerstände
sowieso noch einmal genauer.
Felix K. schrieb:> Andererseits frage ich mich, wieso wenn eine Nachricht ein Ergbnis> bringt, alle anderen ins leere laufen und doppelt im Candump erscheinen.
Du könntest auch einen Logik-Analysator an RXD des SN65HVD230 bzw. an
RXCAN des MCP2515 klemmen und dir dort die Vorgänge auf dem CAN-Bus im
Detail ansehen. Da wird vieles dann doch noch klarer.
LG, Sebastian
Hallo,
ich mache das ganze über esphome.
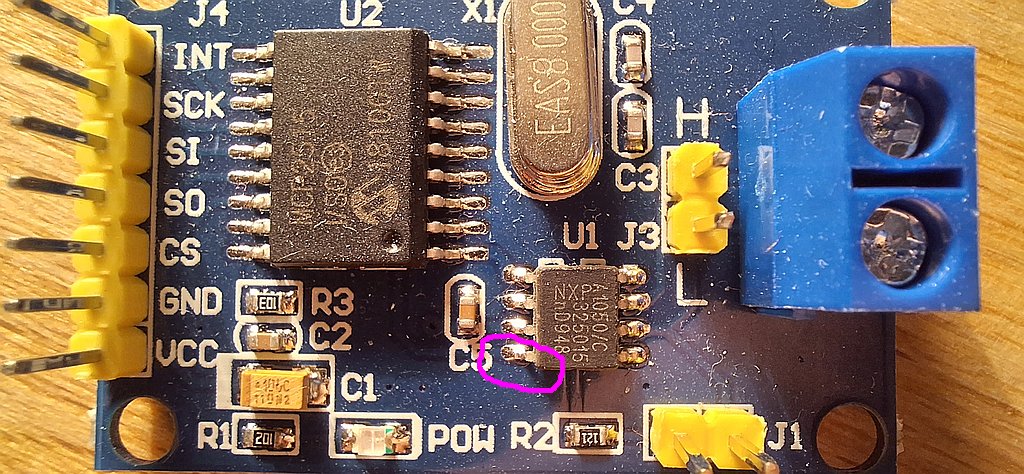
Im mcp2515 ist ein TJA1050 verbaut soweit ich das verstehe.
Ich habe 2 Gegenstellen zum Test aufgebaut und die Kommunikation
funktioniert hier.
Der BUS funktioniert also.
Hi und Low-bit kann ich nicht drehen, da ich einen Fehler bei 0x8000
bekomme.
Da der Wert über 255 ist.
Aber 8ch bekomme auf die 0x0000 auch keine Antwort. Deswegen Versuche
ich hier mein Glück.
Die Verkabelung zum Lader checke ich heute nochmal. Angeschlossen sind
CanH CanL und GND.
Gruß Udo
Wer mit CAN Bus experimentiert, dem empfehle ich einen zusätzlichen CAN
Adapter zu kaufen, damit hat man eine unabhängige Kontrolle was
tatsächlich auf dem Bus übertragen wird.
Der von der Firma PEAK-System ist relativ günstig, die Software sehr gut
und die bieten sogar eine API mit dem man eigene Programme schreiben
kann.
https://www.peak-system.com/PCAN-USB-FD.365.0.html
Ich habe von denen mehrere, weil die mir so gut gefallen und ich habe
auch schon ein paar Programme dafür selbst für den PC geschrieben.
Der Link zeigt auf einen USB Adapter der FD-CAN fähig ist und kompatibel
zu CAN. Es gibt einen "nur CAN" Adapter, den empfehle ich jedoch nicht
zu kaufen, da FD-CAN die Zukunft ist und man nur einmalig Geld dafür
ausgeben möchte.
Das Modul ist mir zu teuer. :-)
Also der Jumper ist aktiviert. Sprich terminiert.
Das Kabel zum Lader ist ca 5cm lang. Sollte also nichts stören.
Meanwell habe ich schon angeschrieben. Leider keine Antwort.
An dem Lader hängt kein Akku.
Das sollte aber nicht das Problem sein oder?
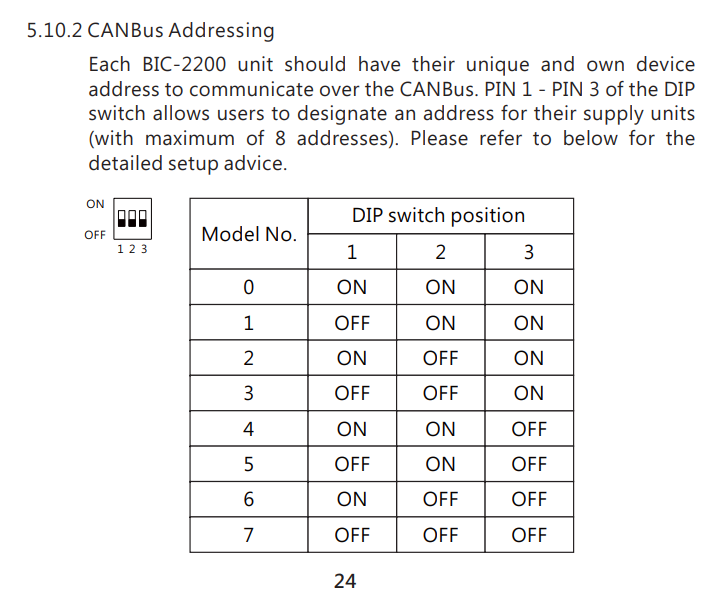
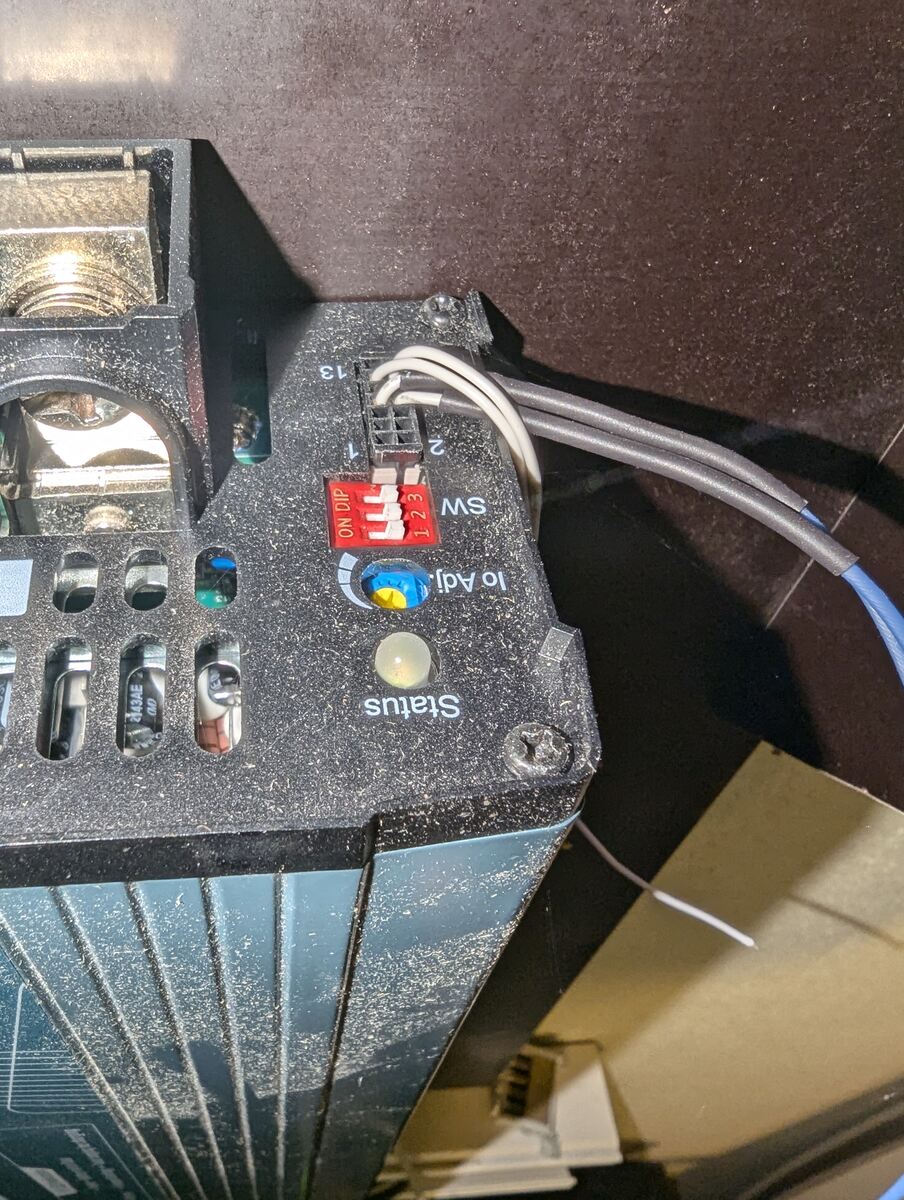
DIP Schalter sind auf programmieren gestellt.
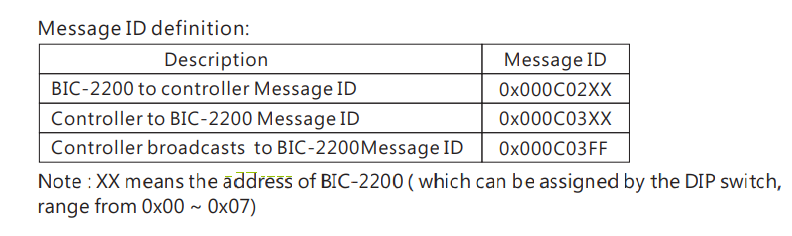
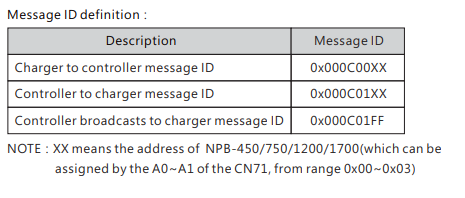
Was ich nicht genau kapiere sind die Adressen oder IDs
Charger to controller message ID
Controller to charger message ID
Controller broadcasts to charger message ID
Message ID
0x000C00XX
0x000C01XX
0x000C01FF
Welche Adresse hat der Lader
Felix K. schrieb:> Allerdings reagiert es komsicherweise nur auf ein Kommando:> und zwar auf> 000C0300#0000> darauf bekomme ich zuerst zweimal meine anfrage zurück.
Eigentlich kannst du deine Anfrage nicht "zurückbekommen", denn CAN
funktioniert nicht wie eine übliche serielle Schnitte mit 2 Teilnehmern.
CAN funktioniert so, dass irgendwer auf dem Bus irgendeine Message mit
einer bestimmten ID auf dem Bus sendet. Und wenn es mindestens 1
Teilnehmer auf dem Bus gibt, der diese ID kennt und die Message brauchen
kann, dann legt der das ACK auf den Bus.
Felix K. schrieb:> Ich nutze einen RasPi mit Can/RS485 HAT von Waveshare und habe alles> soweit konfiguriert, dass ich mit cansend senden und per candump diese> Nachricht auch empfangen kann.
Geschickt ist es immer, wenn man 2 solcher Geräte miteinander verbinden
und untereinander kommunizieren kann. Dann weiß man schon mal, dass die
eigene Hardware tut.
> noch eine Idee?
Ich würde erst mal sicherstellen, dass der CAN-Bus hardwaremäßig gut
funktioniert. Also mit dem Oszi die Pegel und Flanken sowie das Timing
auf beiden Busleitungen kontrollieren. Und dann noch schauen, was sich
überhaupt auf dem Bus tut und ob da irgendwas ausser deiner eigenen
Message auf dem Bus unterwegs ist.
EDIT zum Thema Oszi:
wenn du den Bus beidseitig mit 120R terminierst und einen 4R7 Widerstand
in die beiden Busleitungen schleifst, dann kannst du mit dem Oszi leicht
erkennen, welcher der beiden Teilnehmer grade das dominante Bit auf den
Bus legt.
Alexander schrieb:> Udo E. schrieb:>> Also der Jumper ist aktiviert. Sprich terminiert.>> Und warum?
Ich habe den Jumper auch schon deaktiviert. Gleiches Ergebniss.
Das System Can Bus habe ich verstanden.
Ich habe eine ID und sende einen Command. Die Gegenstelle oder der
Teilnehmer antwortet nur wenn er das in seinem Code hinterlegt hat.
Ich habe 2 ESP32 die miteinander kommunizieren können.
Nur die Kommunikation mit dem Lader funktioniert leider nicht.
Lothar M. schrieb:> Und wenn es mindestens 1> Teilnehmer auf dem Bus gibt, der diese ID kennt und die Message brauchen> kann, dann legt der das ACK auf den Bus.
Nein, das ACK wird immer dann gesendet, wenn mindestens ein Empfänger
die Richtigkeit der Message auf dem Bus incl. CRC bestätigen kann, egal,
ob der Identifier bzw. die Message für ihn gedacht ist oder nicht.
Helmut -. schrieb:> Lothar M. schrieb:>> Und wenn es mindestens 1>> Teilnehmer auf dem Bus gibt, der diese ID kennt und die Message brauchen>> kann, dann legt der das ACK auf den Bus.>> Nein, das ACK wird immer dann gesendet, wenn mindestens ein Empfänger> die Richtigkeit der Message auf dem Bus incl. CRC bestätigen kann, egal,> ob der Identifier bzw. die Message für ihn gedacht ist oder nicht.
Dann ist meine Message nicht richtig??
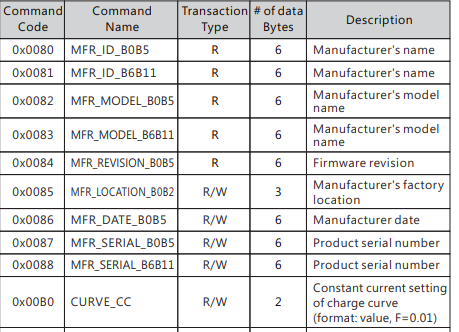
Ich sende 0x0080 das ist laut Anleitung der Herstellername zum lesen.
was bedeutet R und R/W? klingt für mich nach read/write. was du machst
ist W schreiben oder?
Terminierung mal gemessen? Wieviel Ohm? Soweit ich mich erinnere ist da
ein 500 Ohm Widerstand auf dem Modul verbaut.
Alexander schrieb:> was bedeutet R und R/W? klingt für mich nach read/write. was du machst> ist W schreiben oder?>> Terminierung mal gemessen? Wieviel Ohm? Soweit ich mich erinnere ist da> ein 500 Ohm Widerstand auf dem Modul verbaut.
R und W ist Lesen und Schreiben.
Manche Werte können nur gelesen werden.
Aber so weit bin ich noch lange nicht.
Alexander schrieb:> was bedeutet R und R/W? klingt für mich nach read/write. was du machst> ist W schreiben oder?>> Terminierung mal gemessen? Wieviel Ohm? Soweit ich mich erinnere ist da> ein 500 Ohm Widerstand auf dem Modul verbaut.
Also Wiederstand ist 120 Ohm zwischen CanH und CanL
Alexander schrieb:> also wenn Du sicher bist Du sendest mit 250 kbps und 29-bit und Du hast> die Kabel nicht vertauscht, dann bleibt nur der Griff zum Oszilloskop.
Alternativ, wie gesagt, ein Logikanalysator am RX-Pin des Transceivers,
in diesem Fall am TJA1050.
LG, Sebastian
Hallo,
ich probiere jetzt erst Mal MCP-CAN
https://github.com/coryjfowler/MCP_CAN_lib
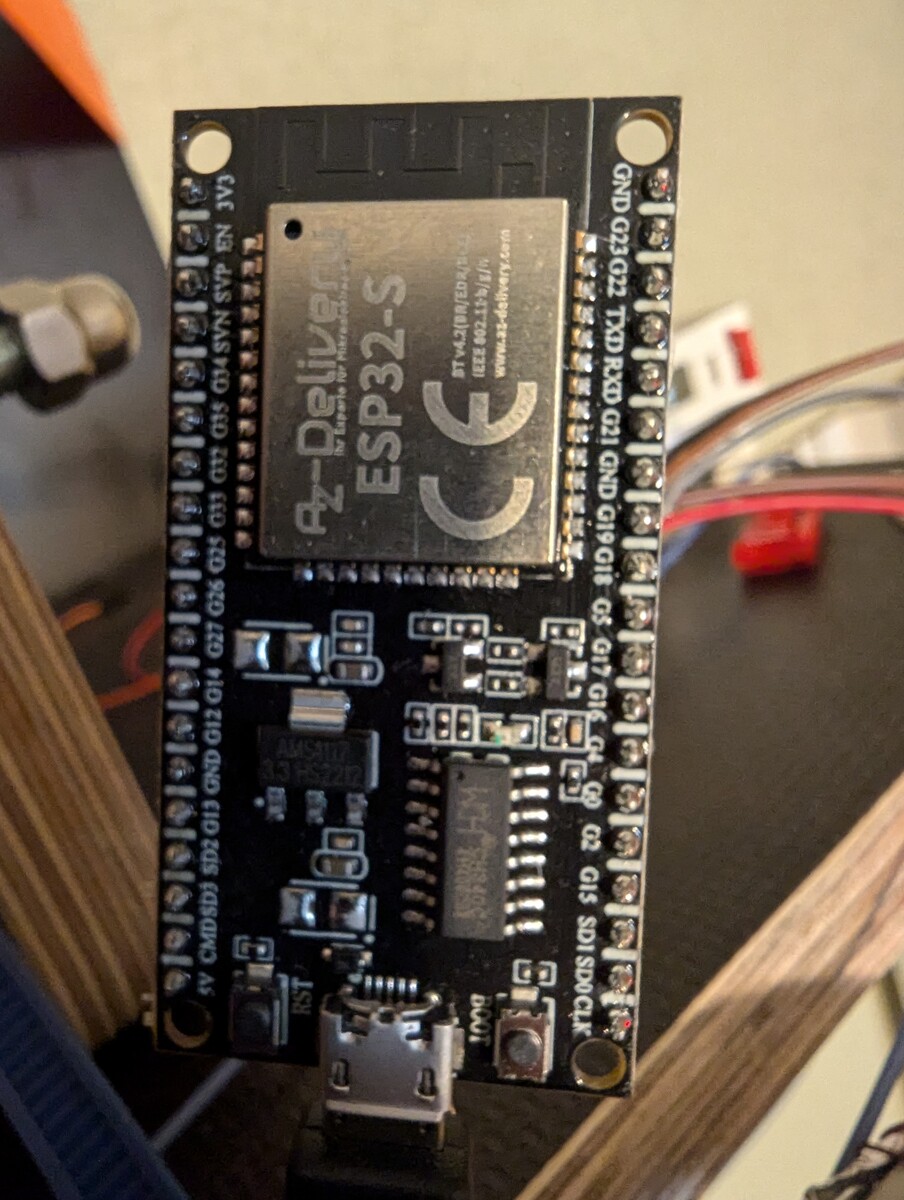
Nur mit der Pinbelegung muss ich noch rumspielen, da ich einen NodeMCU
ESP32 verwende.
Hi there,
I've struggled for the past few days with similar issue. I was using
mcp_can library and after checking that all the registries were setup
correctly and all my hardware was fine and and and....checking
everything!
I then realised with the help of meanwell support that in CANbus you
have to swtich the LSB with MSB!
When you send the command, let's say for IOUT_SET (0x0030), you have to
send it with the two bytes in the opposite order, like so:
byte data[] = {0x30, 0x00};
Hope this helps someone as I was banging my head for a long time!
Hallo,
mittlerweile habe ich das Problem gelöst.
Es war ein Wahnsinns weg um am Schluss doch festzustellen, das am Anfang
alles richtig war!!!
Hier die Lösung.
Der ESP32 funktioniert super mit dem MCP2515.
Hierzu nutze ich ESPHome in meinem Homeassistant.
Wie in dem letzten Post schon steht, muss das LowBIT als 1. abgefragt
werden.
Das habe ich aber schon in einem Post von einer anderen Seite gelesen.
Ich habe mir mit einem Arduino UNO ein CanHack Board gebastelt.
Darüber konnte ich mittels der Software CanHacker Befehle zum Ladegerät
senden und auch visualisieren.
Komischerweise funktionierte das. Nur über ESP32 eben nicht.
Dann hatte ich die Idee mal statt extendet-ID eine normale ID zu senden.
Und siehe da. es funktionierte.
Um das ganze kurz zu machen, habe ich zum Schluss dem MCP2515 getauscht
und musste feststellen, das er das Problem war.
Mit einem anderen funktioniert alles perfekt.
Falls jemand Interesse hat, helfe ich gerne, da ich hier echt am
verzweifeln war.
Gruß Udo
Hallo Udo,
ich habe mir ebenfalls ein Meanwell NPB-1700-24 bestellt.
Ich würde dieses ebenfalls gerne mit Home Assistent oder IP-Symcon
nutzen bzw. regeln.
Da Canbus für mich komplett neu ist, wollte ich mich schon mal etwas
einarbeiten.
Gibt es irgendwo eine Anleitung von Dir wie Du das mit ESP Home gemacht
hast?
Gruß
Giuseppe
Hallo Giuseppe,
ich kann dir da gerne helfen.
Anleitung ist in meinem Kopf.
Allerdings nur mit homeassistant.
Es gibt auch noch einiges das du über die CAN Steuerung wissen musst.
Das Ladegerät muss eingestellt werden.
Wie weit bist du.
Gruß Udo
Hallo Udo,
Danke für die schnelle Antwort.
Aktueller Stand ist Ladegerät bestellt, Lieferung wird aber leider noch
dauern.
Wie geschrieben wollte ich aber schon mal alles vorbereiten und mich in
Canbus etwas einarbeiten.
Ich habe mehrere ESP32 und Arduinos da und habe auch schon das ein oder
andere mit ESP Home gemacht. Von den MCP2515 habe ich einen 3-Pack hier
und einen Waveshare USB to Can habe ich ebenfalls bestellt, dürfte
Morgen eintreffen.
Homeassistant ist vollkommen ok für mich, wichtig ist, dass ich mal
einen Startpunkt habe. Eine Beispiel ESP Home Yaml wäre z.B. ganz cool
dann könnte ich mir die genauer ansehen und versuchen zu verstehen.
Gruß
Giuseppe
Hallo,
du benötigst auf jeden Fall die CAN Anleitung vom Ladegerät.
Ich habe einen ESP32 mit MCP2515. Und das funktioniert.
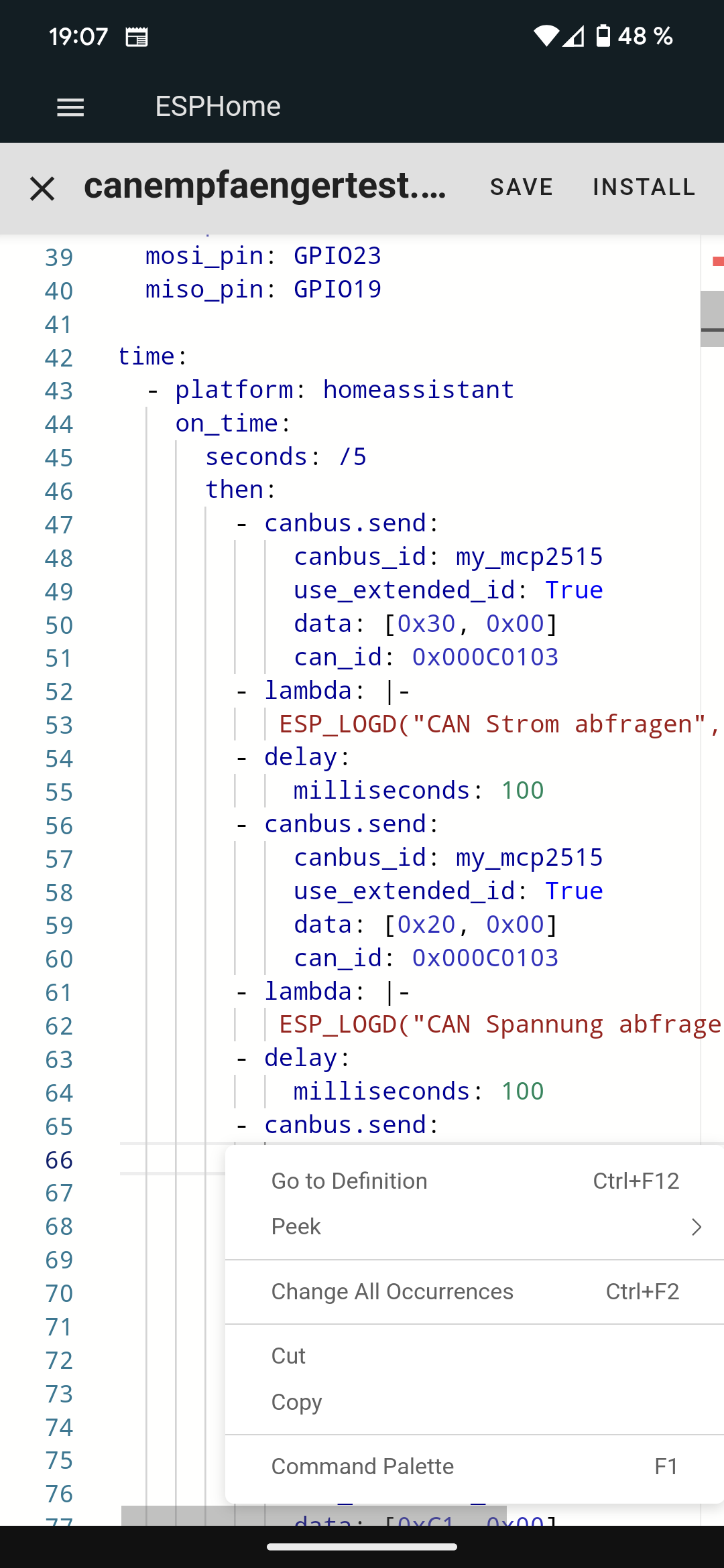
Hier mal ein kleiner Teil meiner Config.
1
spi:
2
id:McpSpi
3
clk_pin:GPIO18
4
mosi_pin:GPIO23
5
miso_pin:GPIO19
6
7
time:
8
-platform:homeassistant
9
on_time:
10
seconds:/5
11
then:
12
-canbus.send:
13
canbus_id:my_mcp2515
14
use_extended_id:True
15
data:[0x30,0x00]
16
can_id:0x000C0103
17
-lambda:|-
18
ESP_LOGD("CAN Strom abfragen","","");
19
-delay:
20
milliseconds:100
21
22
canbus:
23
-platform:mcp2515
24
id:my_mcp2515
25
spi_id:McpSpi
26
cs_pin:GPIO5
27
clock:8MHZ
28
bit_rate:250KBPS
29
30
on_frame:
31
-can_id:0x000C0003
32
#can_id_mask: 0x1fffffff
33
use_extended_id:true
34
then:
35
-lambda:|-
36
if(x[0]==0x88andx[1]==0x00){
37
intseriennummer=int((x[2])&(x[3]));
38
intwert2=int(x[2]);
39
intwert3=int(x[3]);
40
ESP_LOGD("main","Antwort von 00 Hex: %x %x ",wert2,wert3);
Hallo Udo,
Danke, werde es am Wochenende mal testen.
Manual vom Netzteil mit den Canbus Adressen/Befehlen usw. habe ich mir
schon heruntergeladen.
Werde mir mal einen Testaufbau mit zwei Canbus ESP32 erstellen
und die ersten versuche starten.
Falls ich irgendwo hänge, melde ich mich wieder.
Gruß
Giuseppe
Hallo Udo,
habe nun die ersten Tests gemacht.
Mit zwei ESP32 und Canbus Transceiver SN65HVD230.
Senden und empfangen klappt schon mal.
Ich habe mir auch Deinen Codeschnipsel oben angesehen und die
Bedienungsanleitung vom Netzteil.
In Deinem Beispiel oben ist das Auslesen des Ladestroms drin.
1
time:
2
- platform: homeassistant
3
on_time:
4
seconds: /5
5
then:
6
- canbus.send:
7
canbus_id: my_mcp2515
8
use_extended_id: True
9
data: [0x30, 0x00]
10
can_id: 0x000C0103
11
- lambda: |-
12
ESP_LOGD("CAN Strom abfragen","","");
13
- delay:
14
milliseconds: 100
Könntest Du mir noch den Codeschnipsel senden wie man den Ladestromwert
setzt?
Reicht es wenn einfach bei data an die 0x30 der gewünschte Wert
angehängt wird?
Hallo Giuseppe,
ich habe den Ladestrom über einen Schieberegler gelöst.
Dadurch kann ich den Ladestrom je na übrigen Sonnenstrom automatisch
ändern.
hier mal der Code:
Hallo Udo,
vielen Dank.
Jetzt verstehe ich wie ich die Werte ans Netzteil senden kann.
Damit müsste ich es hinbekommen.
Ich muss bei mir halt noch den Überschuss, den ich ja AC seitig habe,
noch umrechnen für DC Seite und dann möchte ich ebenfalls automatisiert
den Akku Ladestrom einstellen.
Wenn das Netzteil endlich da ist und ich das ganze in die Praxis
umgesetzt habe, gebe ich noch mal Rückmeldung.
Gruß
Giuseppe
Kurze Zwischeninfo.
Netzteil ist leider noch nicht da.
Aber ich ich habe schon einiges mit Canbus getestet.
Wie ich geschrieben hatte würde ich bevorzugt IP-Symcon
(https://www.symcon.de/de/) einsetzen.
Deshalb habe ich esp-idf-can2mqtt ausprobiert
(https://github.com/nopnop2002/esp-idf-can2mqtt).
Damit kann ich Canbus Befehle über das ESP Gateway mit IPS senden und
empfangen.
Aktuell versuche ich esp-idf-can2mqtt auf einen Olimex EVB Bord zu
packen.
Dann hätte ich ein Ethernet Gateway mit can2mqtt und mqtt2can.
Damit kann ich mein Projekt sicherlich realisieren.
Nochmals vielen Dank für die sehr hilfreiche Unterstützung.
Wenn das Projekt fertig ist, gebe ich noch mal Rückinfo.
Gruß
Giuseppe
Hallo,
ich brauche wohl doch noch weitere Hilfe.
Wie geschrieben, versuche ich can2mqtt auf den Olimex EVB zu flashen.
Ich bin auch soweit gekommen, dass es tatsächlich läuft, aber eben nur
per WLAN. Ich würde aber gerne LAN nutzen. Deshalb die Frage hier in die
Runde, kennt sich hier jemand gut mit der ESP IDF aus und könnte mich in
die richtige Richtung führen damit ich den Olimex LAN Treiber in das
can2mqtt Projekt einbinden kann?
https://github.com/OLIMEX/ESP32-EVB/tree/master/SOFTWARE/ESP-IDF%20examples/ESP32-EVB_Ethernet_v5.1.1
Netzteil ist zwischenzeitlich angekommen.
Olimex EVB hat per WLAN und MQTT wie erwartet funktioniert.
Da ich es aber unbedingt mit LAN realisieren wollte,
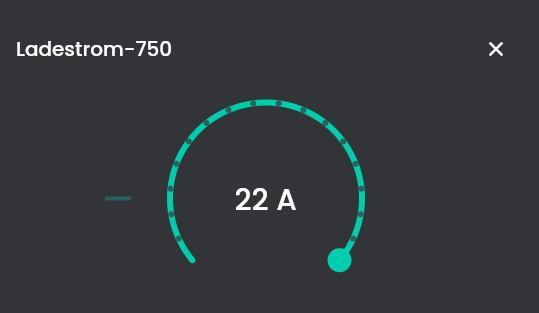
habe ich mir ein Can to Eth Gateway besorgt.
https://www.waveshare.com/wiki/2-CH-CAN-TO-ETH
Damit kann ich nun den Ladestrom mit meiner Smarthome Software regeln
(siehe Bild).
Hallo zusammen,
ich habe heute mein NPB-450 erhalten und wollte es auch bedarfsgerecht
steuern.
Das Kommando 0x0030 (IOUT_SET) scheint keinen wirklichen Einfluss auf
den Ladestrom zu haben. Gesetzt wird es aber wohl richtig, weil ich den
gesetzten Wert auch zurücklesen kann.
Über 0x00B0 (CURVE_CC) kann ich den Ladestrom steuern (ergibt auch Sinn,
solange sich das Ladegerät in der Konstantstromphase befindet), aber
hier wird eine neuer Wert erst übernommen, wenn ich den Lader einmal
aus- und wieder einschalte.
Ist das bei euch genauso?
Viele Grüße
Philipp
Hallo,
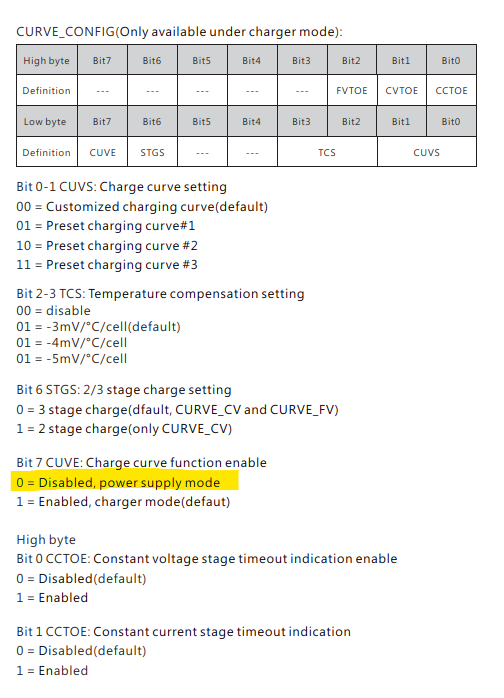
Worüber ich ganz zu Beginn gestolpert bin ist, dass Netzteil hat von
Haus aus Ladekurve eingestellt. Du musst das aber abschalten und auf
Manuelle Ladekurve gehen.
Bit 7 musst auf 0 stellen, erst dann nimmt er Ladestromänderungen per
Canbus an.
Die 3 DIP Schalter müssen auf off sein und der Jumper für Remote On/Off
sollte dran bleiben.
Wenn das BIT 7 auf 0 gestellt hast nicht vergessen das Netzteil Stromlos
zu machen und neu zu starten.
Giuseppe M. schrieb:> Hallo,> Worüber ich ganz zu Beginn gestolpert bin ist, dass Netzteil hat von> Haus aus Ladekurve eingestellt. Du musst das aber abschalten und auf> Manuelle Ladekurve gehen.> Bit 7 musst auf 0 stellen, erst dann nimmt er Ladestromänderungen per> Canbus an.> Die 3 DIP Schalter müssen auf off sein und der Jumper für Remote On/Off> sollte dran bleiben.> Wenn das BIT 7 auf 0 gestellt hast nicht vergessen das Netzteil Stromlos> zu machen und neu zu starten.
Vielen Dank, darüber bin ich jetzt auch zufällig gestolpert :)
Was auch viel gebracht hat, war das aktuelle Datenblatt online
anzuschauen. Dort sind viele Dinge erklärt, die in dem Manual, welches
beim Netzteil dabei war gar nicht erwähnt sind (z.B. was sofort
umgesetzt wird und was erst beim aus- und einschalten).
Leider kann mein Netzteil das Schreiben ins EEPROM noch nicht
abschalten. Kennt jemand eine Quelle, aus der man ein NPB bekommt,
welches schon die neueste Firmware hat?
Hat jemand schon versucht den Strom noch kleiner einzustellen, als es
eigentlich vorgesehen ist? Der Trucki-Stick, der in vielen Youtube
Kanälen angepriesen wird scheint dies zu können. Wenn ich es richtig
verstehe, dann wird dazu die Spannung reduziert.
Viele Grüße
Philipp
Hallo,
warum möchtest du das Ladegerät nicht kleiner einstellen?
Bei meinem sind es 10A. Das entspricht ca. 200-300W.
Was ist die kleinste Stufe bei deinem?
Gruß Udo
Udo E. schrieb:> warum möchtest du das Ladegerät nicht kleiner einstellen?> Bei meinem sind es 10A. Das entspricht ca. 200-300W.>> Was ist die kleinste Stufe bei deinem?
Ich würde es gerne nahezu von 0A einstellen können. Ich habe aktuell ein
450W 12V Ladegerät. Dieses startet bei 5A. Ich habe nicht das 750W
Modell genommen, weil dies bei noch größerem Strom startet (wobei das
passender gewesen wäre).
Aktuell kann ich zwischen 5A und 25A einstellen. Das entspricht ca. 75W
bis 380W.
Verwendet hier noch jemand ESPHome um das NFB zu steuern? Ich benutzte
einen MCP2515 CAN Controller an einem ESP32 mit ESPHome. (Vielen Dank
für den Code, das hat den Einstieg sehr erleichtert, Udo!)
Ab und zu lese ich zB bei der Akkuspannung 18V zurück. Hier scheint ab
und zu etwas nicht ganz sauber in der Kommunikation zu sein.
Viele Grüße
Philipp
Hey,
You won't be able to set the charging current below the minimum that is
stated in the datasheet.
I haven't used ESPHome but my code in c++ works well for setting and
reading, have no problems with that. You'd have to either hook up a
logical analyser or or look into the controller's response somehow else.
I guess you sorted out the termination correctly? Keep in mind that NPBs
have an internal termination resistor already.
Matej
Wenn du noch Hilfe benötigst, melde dich einfach.
Ich war lange auf der Suche nach der richtigen Verkabelung usw.
Ich nutze das ganze über ESP Home an Homeassistant.
Hier noch ein Tipp.
Falls du ein BMS verwendest, würde ich das Entladen schon bei unter 5%
beenden, da das Ladegerät sonst Macken bezüglich der Erkennung des Akkus
macht.
Ich schalte das Ladegerät auch nicht aus, sonder nutze die ein/aus
Funktion über den CANBus.
Gruß Udo
Hallo,
Matej L. schrieb:> You won't be able to set the charging current below the minimum that is> stated in the datasheet.
Kleinere Ströme sind möglich, wenn man VOUT reduziert und diese einfach
nur wenige 10mV über die aktuelle Batteriespannung setzt.
Udo E. schrieb:> Falls du ein BMS verwendest, würde ich das Entladen schon bei unter 5%> beenden, da das Ladegerät sonst Macken bezüglich der Erkennung des Akkus> macht.
Mein BMS hat leider keine Schnittstelle. Ich habe zwei 12V 100Ah Akkus
parallel (12V, weil ich dafür schon einiges hatte). Ich würde nun bei
12,0V abschalten, um die Akkus nicht zu weit zu entladen.
Laden würde ich am NPB bei 14,0V einstellen.
Giuseppe M. schrieb:> https://community.symcon.de/t/canbus-ladegeraet-in-symcon-einbinden/136578> Vielleicht hilft es den ein oder anderen weiter.
Super! Genau sowas habe ich anfangs gesucht und leider nicht gefunden.
Viele Grüße
Philipp
Ah ok, guess you want to trickle charge? My application is different, as
I use the charger to do emergency charging with a backup gasoline
generator. Meaning I want to pump as much as safely possible in the
shortest period of time.
Hallo zusammen,
ich hoffe, dass in diesem Thread noch was los ist.
@grisu74 ich versuche es im Moment eigentlich, glaube ich, fast genau
wie du.
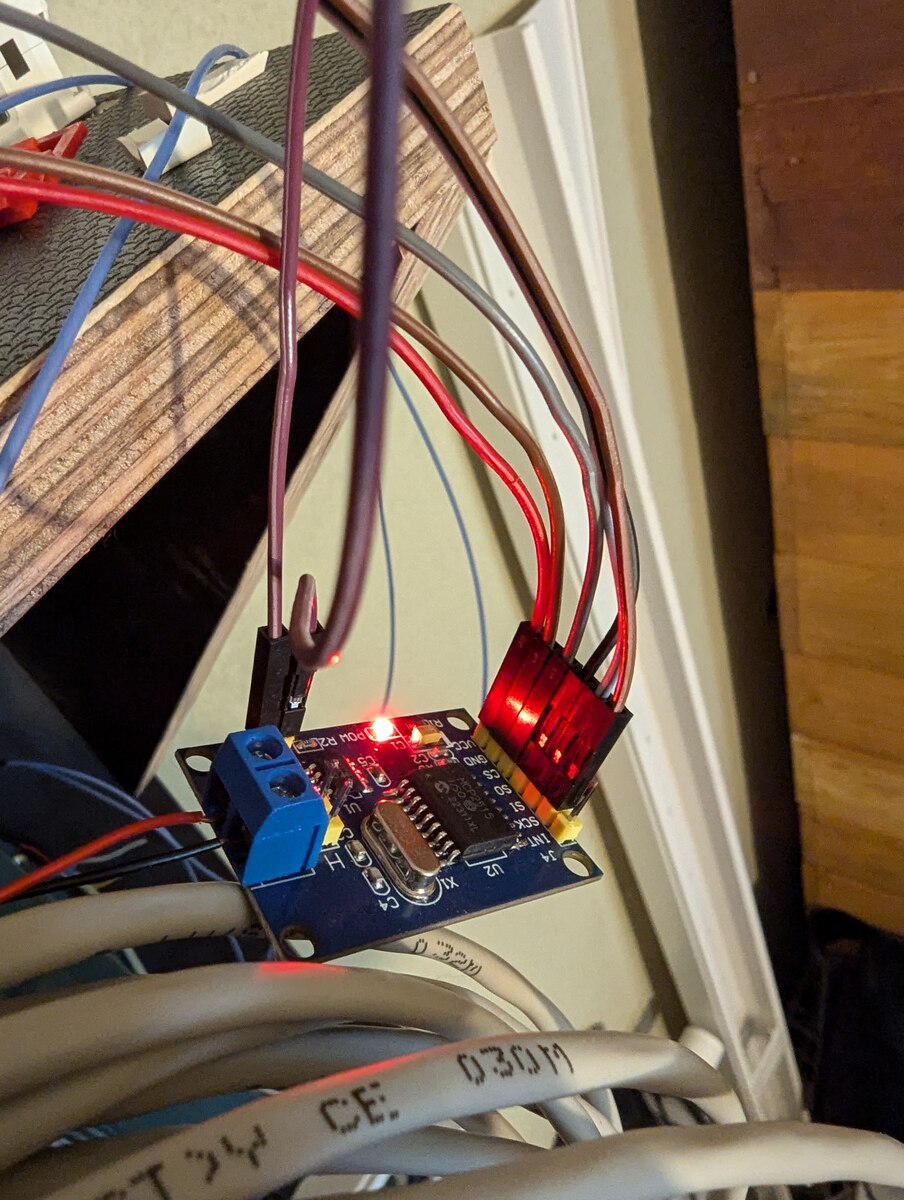
Ich habe ein NPB-750-24 und versuche dieses anzusteuern mit einem dieser
China-Boards mit MCP2515/TJA1050 an einem ESP32(S3). Dass mir der
Transceiver allein auch gereicht hätte und der ESP CAN bzw. TWAI
anbietet, habe ich erst danach mitbekommen, aber seis drum, jetzt
versuche ich das eben über SPI.
Und (noch) ohne Level Shifter, sondern mit 4,7kOhm an MISO. Allerdings
gehen mir langsam die Ideen aus. Da du aber geschrieben hast, du hattest
auch einige Versuche nötig mit der Verkabelung, versuche ichs mal und
hoffe auf den entscheidenden Tipp, um um den Level Shifter/extra
umsteigen auf Transceiver + wieder andere Implementierung mit ESP-CAN
rumzukommen und einfach das vorhandene MCP2515 Modul zu verwenden.
- CANH und CANL sind mit dem MCP verbunden, GND (Signal, Pin 4 am NT)
mit dem ESP.
- Der MCP am ESP mit CS (GPIO10), MOSI (GPIO11), SCK (GPIO12), MISO
(GPIO13), sowie VCC an 5VBUS und natürlich GND.
- ESPHome wirft keine Fehler bei der CAN/SPI Initialisierung, außer wenn
ich was an der Verkabelung (zum falschen) ändere, also da gehe ich
aktuell mal vom richtigen aus und dass sich was mit den Pins in die
Quere kommt, 10-13 sollte auch safe sein
- Pins 7 und 8 am NT sind gebrückt, die DIPs alle auf off (und waren nie
anders). Beim aus- und wieder einstecken des Steckers schaltet das NT
auch kurz in den Charging Modus, mangels Akku aber gleich wieder aus -
aber den brauchtest du ja auch nicht zum Testen, richtig?
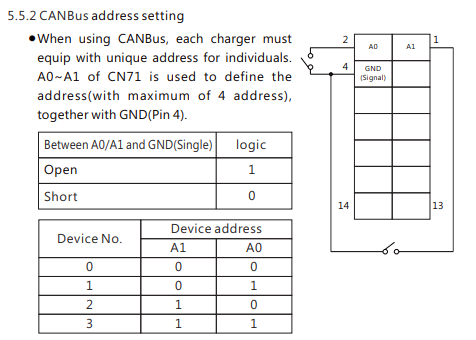
- Sender ID 0x000C0103, Receiving ID 0x000C0003, 8MHz Clock und 250 kbps
in ESPHome gecheckt (A0 und A1 sind unverbunden, also high laut Manual)
- ich habe alle möglichen Nachrichten schon implementiert, aber erstmal
würde mir eine einfache Antwort auf 0x0000 (OPERATION) schon reichen,
das sollte ja klappen auch ohhne Bit 7 der CURVE_CONFIG auf 0 gesetzt zu
haben.
Du hattest geschrieben, du hast den MCP2515 letztlich tauschen müssen,
von welchem zu welchem bist du da gegangen, oder hattest du zwei gleiche
von denen einfach einer blöd war?
Vielen Dank im Voraus!
Gruß Fabian
Hallo, ach danke für die schnelle Antwort. Okay, ich habe auch zwei und
der zweite macht die selben Faxen, bzw. halt gar nichts. Mir fällt auf,
dass die Spannung an CANH und CANL nahezu identisch sind. Das kommt mir
merkwürdig vor.
Ich bin jetzt auch bald kurz davor alles einfach fest zu verlöten..
Davor prüfe ich noch die selbe Pinbelegung wie bei dir.
Das GND(Signal) am NT hast du einfach vom ESP genommen oder kommt das
bei dir auch von der MCP-Platine?
Hast du den INT-Pin vom MCP belegt/angesteuert?
Fabian B. schrieb:> Hallo, ach danke für die schnelle Antwort. Okay, ich habe auch zwei und> der zweite macht die selben Faxen, bzw. halt gar nichts. Mir fällt auf,> dass die Spannung an CANH und CANL nahezu identisch sind. Das kommt mir> merkwürdig vor.> Ich bin jetzt auch bald kurz davor alles einfach fest zu verlöten..> Davor prüfe ich noch die selbe Pinbelegung wie bei dir.>> Das GND(Signal) am NT hast du einfach vom ESP genommen oder kommt das> bei dir auch von der MCP-Platine?> Hast du den INT-Pin vom MCP belegt/angesteuert?
Hallo,
CAN H und L müssen gleiche Spannung haben. GND ist sozusagen in der
Mitte.
Das Ladegerät hast du richtig eingestellt?
Die Dipschalter und die Brücke?
Genaueres müsste ich erst noch nachsehen.
Mein ESP läuft noch mit Probeverkabelung. Ich würde die Kabel nochmals
prüfen. Ich schicke dir meine Belegung.
Dauert allerdings ein wenig.
Nicht aufgeben.
Gruß Udo
Hi, Udo hmm ok. Den MCP hast du aber schon auch an +5V oder? Das Board
soll ja angeblich 5V benötigen, der MCP scheint sich an und für sich
aber auch mit 3,3V zu begnügen. Dann wäre das Logic Level gleich
erledigt... oder benötigt das NPB explizit einen 5V Pegel? Da find ich
jetzt nichts dazu...
Das Ladegerät würde ich als richtig eingestellt bezeichnen, immer und
immer wieder hab ich die Pins geprüft.
- die 3 DIPs sind auf links wie im Originalzustand (off).
- Pin 7 und 8 sind gebrückt also Remote ON ist short
- CANL an 12 und CANH an 11, GND vom ESP an Pin 4... Der Rest ist frei.
Ich dank dir ganz herzlich schonmal im Voraus und keine Eile, aufgegeben
wird nicht bis es sich beugt :D Ich bin gespannt auf deine Verkabelung.
Fabian B. schrieb:> Hi, Udo hmm ok. Den MCP hast du aber schon auch an +5V oder? Das Board> soll ja angeblich 5V benötigen, der MCP scheint sich an und für sich> aber auch mit 3,3V zu begnügen. Dann wäre das Logic Level gleich> erledigt... oder benötigt das NPB explizit einen 5V Pegel? Da find ich> jetzt nichts dazu...>> Das Ladegerät würde ich als richtig eingestellt bezeichnen, immer und> immer wieder hab ich die Pins geprüft.> - die 3 DIPs sind auf links wie im Originalzustand (off).> - Pin 7 und 8 sind gebrückt also Remote ON ist short> - CANL an 12 und CANH an 11, GND vom ESP an Pin 4... Der Rest ist frei.>> Ich dank dir ganz herzlich schonmal im Voraus und keine Eile, aufgegeben> wird nicht bis es sich beugt :D Ich bin gespannt auf deine Verkabelung.
GND nicht anschließen.
Nur CAN H und L
Es gibt kein GND bei CAN
Fabian B. schrieb:> CANH und CANL sind mit dem MCP verbunden
Ich hoffe doch mit dem TJA-Transceiver...
Eine GND-Verbindung braucht man bei CAN normalerweise nicht.
> Den MCP hast du aber schon auch an +5V oder? Das Board> soll ja angeblich 5V benötigen, der MCP scheint sich an und für sich> aber auch mit 3,3V zu begnügen.
Der MCP2515 würde auch mit 3,3V funktionieren, aber der TJA-Transceiver
braucht 5V. Deshalb betreibt man die China-CAN-Boards mit 5V.
Den MOSI vom ESP kann man bei 3,3V direkt an den MCP2515 klemmen. Der
MCP erkennt die 3,3V als High-Pegel.
Den MISO vom MCP zum ESP, also von 5V Ausgang auf 3.3V Eingang spendiert
man einen Widerstand in Reihe, 4k/ wie du hast passt auch.
INT schliesst man an wenn man CAN-Botschaften interruptgesteuert
empfangen will.
Danke euch..
- GND hatte ich zuerst auch gar nicht dran, dann damit versucht, jetzt
wieder weg, leider immer noch ohne Erfolg
- MCP bleibt dann wie er ist auf 5V mit dem 4,7k an MISO
- INT ist und bleibt unverbunden..
- beide MCP Module machen ähnlich wenig
- ich habe sogar den 5V auf 3,3V LDO vom ESP aufgemotzt, um hier einen
eventuellen Spannungsabfall/-engpass auszuschließen, wobei der ESP32 mit
sonst gar nichts außer einem SPI doch wohl nicht exorbitant Strom ziehen
sollte
- ein zweites NPB werde ich noch ausprobieren
ich ziehe langsam in Betracht, dass ich wohl vielleicht einfach zwei
Mist-MCPs bekommen habe. Aber noch glaub ich nicht ganz dran :D
Fabian B. schrieb:> Danke euch..> - GND hatte ich zuerst auch gar nicht dran, dann damit versucht, jetzt> wieder weg, leider immer noch ohne Erfolg> - MCP bleibt dann wie er ist auf 5V mit dem 4,7k an MISO> - INT ist und bleibt unverbunden..> - beide MCP Module machen ähnlich wenig> - ich habe sogar den 5V auf 3,3V LDO vom ESP aufgemotzt, um hier einen> eventuellen Spannungsabfall/-engpass auszuschließen, wobei der ESP32 mit> sonst gar nichts außer einem SPI doch wohl nicht exorbitant Strom ziehen> sollte> - ein zweites NPB werde ich noch ausprobieren>> ich ziehe langsam in Betracht, dass ich wohl vielleicht einfach zwei> Mist-MCPs bekommen habe. Aber noch glaub ich nicht ganz dran :D
Ich mach morgen mal ein Bild von meinem Aufbau. Dann kannst du genau
vergleichen.
Die Befehle stimmen auch?
Gruß Udo
Udo E. schrieb:> GND nicht anschließen.> Nur CAN H und L> Es gibt kein GND bei CAN
was erzählt ihr denn da, natürlich gibt es GND über gemeinsame Masse
das mit der Masse muss wohl noch geklärt werden, ich habe dann auch
nachgelesen dass es eigentlich ein 3-Wire Aufbau sein sollte, aber gut,
wenn es bei Udo ohne GND geht.. hm
bei den Nachrichten sehe ich keinen Fehler.
für OPERATION habe ich bspw. folgenden Template-Button
1
button:
2
- platform: template
3
id: get_operation_status
4
name: Get operation status
5
on_press:
6
- canbus.send:
7
canbus_id: can_mcp2515
8
data: [0x00, 0x00]
9
- lambda: |-
10
ESP_LOGD("main", "CAN get OPERATION (0x0000)", "");
ich glaube da kann nicht viel falsch laufen, da ich ja einfach nur
0x0000 sende..
wobei canbus wie folgt definiert ist:
1
spi:
2
id: mcp2515_spi
3
clk_pin: GPIO12
4
mosi_pin: GPIO11
5
miso_pin: GPIO13
6
canbus:
7
- platform: mcp2515
8
id: can_mcp2515
9
spi_id: mcp2515_spi
10
cs_pin: GPIO10
11
can_id: 0x000C01FF
12
use_extended_id: true
13
clock: 8MHZ
14
bit_rate: 250KBPS
15
on_frame:
16
- can_id: 0x000C0003
17
can_id_mask: 0x1fffff00
18
use_extended_id: true
19
then:
20
- lambda: |-
21
std::string b(x.begin(), x.end());
22
ESP_LOGD("main", "Received: %s", &b[0]);
die can id habe ich gerade zwischenzeitlich auch mal in 0x000C01FF
geändert statt 03, als Controller to Charger Broadcast wie im Manual
angegeben. Andert auch nix. Dann noch die can_id_mask dazu genommen beim
on_frame, um die letzten 2 Stellen zu ignorieren. Auch ohne Erfolg.
Wenn ich ein bisschen an den Kabeln rüttel, meldet der ESP sofort einige
angebliche Nachrichten, also irgendwas tut es ja...
Mal nochmal zur Sicherheit: Pins 7 und 8 müssen SHORT sein am Netzteil,
richtig?
Udo E. schrieb:> GND nicht anschließen.> Nur CAN H und L> Es gibt kein GND bei CAN
Wenn man sich den Transceiver zerschießen will, nur zu. Natürlich
benötigen CAN H und CAN L ein Bezugspotential.
guten Morgen!
den 120er auf dem MCP muss man brücken? ne, das wusste ich noch nicht..
wird getestet.
bin gestern noch mit Flussmittel über ESP und MCP drüber um eventuelle
kalte Lötstellen o.ä. zu eliminieren, leider war offenbar bereits alles
gut.. ein Wechsel auf ESP8266 stünde heute noch an.
Hallo bei mir sieht das funktionierende Setup so aus:
canbus:
- platform: mcp2515
id: my_mcp2515
spi_id: McpSpi
cs_pin: GPIO27
bit_rate: 250KBPS
can_id: 123
on_frame:
- can_id: 0x000C0003
#can_id_mask: 0x1fffffff
use_extended_id: true
then:
- lambda: |-
if(x[0]==0x30 and x[1]==0x00) {
float leistung =float(float((int((x[2])+( (x[3])<<8))))/100);
ESP_LOGD("main", "Der Ladestrom ist %f", leistung);
}
ich habe die Mask auskommentiert und einfach in den Lambdas nach der
Nachricht geschaut (ist nicht nur das hier reinkopierte)
Viele Grüße
Philipp
Thomas F. schrieb:> Ich hoffe doch mit dem TJA-Transceiver...> Eine GND-Verbindung braucht man bei CAN normalerweise nicht.
Die braucht man genau dann nicht, wenn alle Steuergeräte die gleiche
Masse haben. So ist das im Auto.
Am Labortisch liegt der eine Teilnehmer über den USB auf
Schutzleiter-Potential, und der andere über die Masseklemme des Oszis.
Das tut es auch, zumindest wenn PC und Oszi an der selben
Steckdosenleiste hängen. Falls sich in der Firma IT-Strom und Versorgung
des Labortisches erst im Keller treffen, können die beiden Schutzleiter
auch mal 10 V auseinander sein. Dann funktioniert es ein paar Tage und
plötzlich wird der Controller heiss.
Daher besser die Masse mitführen.
Das Signal bei CAN ist U_CAN = (U_CANH - U_GND) - (U_CANL - U_GND).
Mathematisch gesehen kürzt sich U_GND raus. Physikalisch gesehen werden
aber beide Spannungen gegen Masse gemessen.
also den 120 Ohm Widerstand auf dem MCP zu brücken hat auch nichts
geändert.
GND nun doch mal an Pin 4 hinzufügen? schadet ja nicht?
@e61_phil danke, sieht bei mir ja quasi genauso aus. Udo hat die Vorlage
ja dankenswerterweise schon gepostet, daran habe ich mich auch
orientiert.
Danke an alle Kommentatoren.
Also, GND wieder an Pin 4, keine Änderung, auch mit dem ESP8266 (GPIOs
12-15) kommt nix an, jetzt würde ich noch einen anderen ESP32
ausprobieren oder gleich einen 74HCT125 Level Shifter dazwischen
hängen...
danke an alle und besonders dich Udo für deine Mühe. Achtung, jetzt
wird's peinlich. Ich habe falsch verstanden, was du meintest mit den
Widerstand brücken... Wenn man den Jumper (J1) setzt, dann geht's auch.
Mir war nicht klar, dass der Widerstand sonst vom Bus getrennt ist.
Heilige Sch...
Ich hoffe, das wird wenigstens zukünftigen Lesern einige blöde
Fehlersucherei ersparen!
Danke nochmal!
Zusätzlich, um auch was sinnvolles beizutragen, würde ich gerne noch
teilen, wie ich meine SET_IOUT Funktion umgesetzt habe - nämlich mit
einer Template Number als Ziel-Stromvorgabe. Sieht aus wie folgt:
1
number:
2
- platform: template
3
optimistic: yes
4
max_value: 22.5
5
min_value: 4.5
6
step: 0.1
7
id: target_current
8
name: Target charging current
9
set_action:
10
- delay:
11
milliseconds: 100
12
- button.press: set_current
13
14
button:
15
- platform: template
16
id: set_current
17
name: Set charging current
18
on_press:
19
then:
20
if:
21
condition:
22
lambda: |-
23
return (id(target_current).state);
24
then:
25
- lambda: |-
26
uint32_t can_id = 0x00C0103;
27
bool use_extended_id = 1;
28
float x = float(id(target_current).state);
29
uint16_t current = x*100;
30
ESP_LOGD("main", "Target current is %f, must become %d then %02x", x, current, current);
ESP_LOGD("main", "Target current is invalid, skip", "");
43
- platform: template
44
id: bit7_disable
45
name: Switch to PSU mode
46
on_press:
47
- canbus.send:
48
canbus_id: can_mcp2515
49
data: [0xB4, 0x00, 0x04, 0x00]
50
- lambda: |-
51
ESP_LOGD("main", "CAN set CURVE_CONFIG (0x00B4) Bit 7 = 0 (0x0004), please power cycle NPB afterwards", "");
52
- platform: template
53
id: bit7_enable
54
name: Switch to Charger mode
55
on_press:
56
- canbus.send:
57
canbus_id: can_mcp2515
58
data: [0xB4, 0x00, 0x84, 0x00]
59
- lambda: |-
60
ESP_LOGD("main", "CAN set CURVE_CONFIG (0x00B4) Bit 7 = 1 (0x0084), please power cycle NPB afterwards", "");
In meinem Fall (NPB-750-24) kann ich laut Manual zwischen 4,5 und 22,5 A
einstellen, entsprechend habe ich die Template Number begrenzt. Bei
Änderung wird automatisch der Template Button gedrückt, der dann das
Kommando absetzt und den Wert der Number in Hex übersetzt. Vielleicht
kanns ja jemand gebrauchen.
Dazu habe ich zwei Template Buttons für den CURVE_CONFIG Bit7 Toggle
eingebaut.
Habe noch mehr Spielereien eingebaut... bei Fragen gerne fragen.
Vielen Dank euch hier für das Teilen, dieser Thread hat mir damals auch
geholfen.
Den Strom stelle ich bei mir direkt über eine Number ohne extra Button:
number:
- platform: template
name: "Charge Current"
unit_of_measurement: "A"
optimistic: true
min_value: 5
max_value: 25
step: 0.01
mode: box
id: iout_set
on_value:
then:
- lambda: |-
int setpoint = id(iout_set).state * 100;
byte a = setpoint;
byte b = setpoint >> 8;
uint32_t can_id = 0x000C0103;
bool use_extended_id = 1;
std::vector< uint8_t > data{ 0x30, 0x00, a, b };
id(my_mcp2515)->send_data(can_id, use_extended_id, data);
PS: Mein Lader kann 5-25A
Wie oft setzt ihr bei euch den Strom um das EEPROM nicht zu schnell zu
zerstören?
EEPROM Zerstören??
Ich setze sekündlich den Ladestrom rauf oder runter.
In 1 A Schritten, da ich ja die überschüssige Sonnenenergie nutzen
möchte.
Gruß Udo
Die Konfiguration wird wohl bei jedem Setzen im EEPROM abgelegt. Bei
neuerer Firmware kann man das auch über CAN abschalten. Mein Lader kann
das leider noch nicht. Ich meine im Handbuch steht irgendwo etwas von 4
Millionen Schreibzyklen oder so.
Warum in 1A Schritten? Der Lader kann doch auch 0,1A?
Noch eine Sache: Es gibt einen Trucki-Stick, der wohl auch unter dem
minmalen Ladestrom des Laders gehen kann. Ich denke, dass er das über
die Spannungsbegrenzung macht. Ich habe damit mal gespielt und bei so
auch Ladeströme unter 5A einstellen können. Nutzt das jemand von euch?
das EEPROM hab ich noch im Blick und die Begrenzung. Hast du da einen
kurzen Tipp wie der Befehl wäre? Hab in meinem Manual dazu nichts
gefunden aber es mal irgendwo gelesen.
Gleiches gilt für die Spannungsbegrenzung. Das wollte ich mir auch noch
ansehen, jedoch noch nichts weiter. Mein Akku ist auch noch gar nicht
da. Also wenn ich mit SET_VOUT etwas runtergehe nimmt SET_IOUT auch
geringere Werte entgegen?
Sind auf jeden Fall zwei Dinge die ich noch umsetzen will.
PS: Code kannst du hier auch einfach in [ code ] Tags setzen für die
Formatierung. Danke fürs Teilen!
Philipp C. schrieb:> Wie oft setzt ihr bei euch den Strom um das EEPROM nicht zu schnell zu> zerstören?
Ich habe nicht den ganzen Thread durchgelesen aber ...
Man muss ja nicht immer in die gleiche Speicherstelle schreiben. Es gibt
Techniken (Software) die das über den gesamten Speicher verteilt und ihn
erst löscht wenn er voll ist. So kann die Lebensdauer vervielfacht
werden.
Obelix X. schrieb:> Ich habe nicht den ganzen Thread durchgelesen aber ...>> Man muss ja nicht immer in die gleiche Speicherstelle schreiben. Es gibt> Techniken (Software) die das über den gesamten Speicher verteilt und ihn> erst löscht wenn er voll ist. So kann die Lebensdauer vervielfacht> werden.
Machen Sie vermutlich auch, um auf die genannten 4 Million zu kommen.
Wenn man 1x pro Sekunde schreibt sind das nur 4 Millionen Sekunden.
Gehen wir mal davon aus, dass man maximal 10h am Tag diese Regelung
laufen hat, dann macht das
4e6s / (10 * 3600) = 111 Tage
Damit wäre das Teil wohl nach einem Jahr hin.
https://www.meanwell.com/Upload/PDF/NPB,NPP-E.pdf in dem Manual auf S. 6
SYSTEM_CONFIG und dann Bit 10 EEP_OFF
"Bit 10 EEP_OFF: Disable to write voltage and current parameters to
EEPROM
0= Write the voltage and current parameters into EEPROM in real time
(Default)
1= Disable to write the voltage and current parameters into EEPROM in
real
time
Please refer to Chapter 6.4.4 for details."
Leider kann meiner das noch nicht. Es taucht in meinem Handbuch auch
nicht auf. Ich habe es trotzdem mal probiert, aber leider geht es
wirklich nicht.
In 6.4.4. steht dann:
"Description of EEP_OFF:
1. When the EEP_OFF, the bit 10 of the high byte of SYSTEM_CONFIG is 0 (
default) : These seven commands 0xB0 to B3, 0xB9, 0x20, and 0x30 are
written into EEPROM in real time.
2. When the EEP_OFF, the bit 10 of the high byte of SYSTEM_CONFIG is 1:
These seven commands: 0xB0 to B3, 0xB9, 0x20, and 0x30 cannot write
into EEPROM."
Die Anzahl der Zyklen habe ich auf die schnelle nicht gefunden
Zum Laden bei kleinerem Strom: Nein, einfach die Spannung reduzieren
gibt einem keinen weiteren Einstellbereich beim Strom, aber bei
entsprechend kleiner Spannnung fließt einfach weniger Strom und den
liefert das Ladegerät bis zu gewissen Grenzen dann auch, auch wenn der
unter dem einstellbaren Minimum liegt.
Fabian B. schrieb:> Bei dir bleibt er einfach bei high byte = 0?
Ja, leider schon. Ich teste heute Abend deinen Code aber noch einmal.
Aktuell habe ich ein 12V System mit 400Ah LFP (4x 100Ah) daran einen NPB
480-12. Ich würde gerne auf den NPB 1700-12 gehen, aber natürlich ungern
einen für 400EUR bestellen um dann zu merken, dass der das auch nicht
abschalten kann.
Womit macht ihr die Einspeisung? Und welche Akkuspannung nutzt ihr?
Ggf. wäre ein Umbau bei mir ohnehin sinnvoll.
Viele Grüße
Philipp
Ah Mist.. okay.. ärgerlich. Ich habe das Netzteil direkt aus China
geordert und die Sache war mir gar nicht bewusst, hatte jetzt einfach
Glück. Das Herstellungsdatum habe ich ausgelesen, 27.05.2024.
Ich habe geplant auf 8x 100Ah LiFePo zu gehen. Warte aber aktuell noch
auf die Lieferung, hängt wohl im Zoll. Entsprechend habe ich ein
NPB-750-24 und einen SoyoSource GTN-1000W-24. Abgerundet wird's von
einem JK B2A8S20P BMS.
Den WR versuche ich jetzt auch noch anzusprechen über RS485, soll beides
der selbe ESP32S3 übernehmen.
Mach das alles aber auch zum ersten Mal, entsprechend kann ich leider
gar keine Aussagen treffen, vor allem Mangels Akku noch, alles nach
bestem Wissen nach Recherche zusammengetragen :D
Welchen WR und BMS hast du?
Philipp C. schrieb:> Zum Laden bei kleinerem Strom: Nein, einfach die Spannung reduzieren> gibt einem keinen weiteren Einstellbereich beim Strom, aber bei> entsprechend kleiner Spannnung fließt einfach weniger Strom und den> liefert das Ladegerät bis zu gewissen Grenzen dann auch, auch wenn der> unter dem einstellbaren Minimum liegt.
Ja gut, also mit VOUT runtergehen leuchtet mir ein, aber wie(so) sollte
deswegen der Ladestrom auch sinken?
Leider kann man IOUT ohne Akku nicht setzen, bzw. READ_IOUT ergibt immer
0, sodass ich da im Moment das effektive Minimum noch nicht herausfinden
kann. Bei der Spannung sind es ziemlich genau 21 Volt, die das Netzteil
noch zulässt. Allerdings krieg ich damit ja auch keinen 8-Zellen LFP
Akku voll..
Irgendwas scheine ich da noch nicht verstanden zu haben, aber eine
andere Lösung/Möglichkeit die Ladeleistung zu reduzieren erschließt sich
mir auch nicht? Und wirklich weit runter käme man damit ja auch nicht.
Ich hatte bei der o.g. Funktion zum Ladestrom setzen übrigens einen
Dreher bei hex0/hex1.. Ups. Hier korrekt, mit dem Analogon zur
Spannung/VOUT_SET:
1
- platform: template
2
id: mw_set_voltage
3
name: "${mw_name} set charging voltage"
4
on_press:
5
then:
6
if:
7
condition:
8
lambda: |-
9
return (id(mw_target_voltage).state);
10
then:
11
- lambda: |-
12
uint32_t can_id = id(global_can_sender_id);
13
bool use_extended_id = 1;
14
float x = float(id(mw_target_voltage).state);
15
uint16_t voltage = x*100;
16
ESP_LOGD("${mw_name}", "Target voltage is %f, must become %d then %02x", x, voltage, voltage);
ESP_LOGD("${mw_name}", "Target current is invalid, skip", "");
Würde dann noch eine Funktion schreiben, der man einfach die
Ladeleistung vorgibt, die dann je nach dem den Strom setzt und ggf. auch
noch mit der Spannung runtergeht. Dafür brauchts dann aber erstmal den
Akku hier, wie gesagt.
Hallo Udo,
dann ist dein Netzteil wohl vom 28.11.23 mit der FW Rev. 1.10 und damit
leider zu alt für die EEPROM Funktion :(
Trotzdem würde ich einfach mal versuchen, SYSTEM_CONFIG mit 0x0403 zu
setzen wie oben geschrieben. NT neustarten und nochmal kucken, was bei
der Abfrage von SYSTEM_CONFIG dann raus kommt.
Fabian B. schrieb:> Ja gut, also mit VOUT runtergehen leuchtet mir ein, aber wie(so) sollte> deswegen der Ladestrom auch sinken?
Weil Du eine Spannung zwischen der Zelle und dem Ladegerät brauchst,
damit Strom fließen kann.
Die Spannung musst Du dann natürlich auch nachführen, darum benutze ich
das bisher nicht. Zudem fängt es bei mir auch schon bei etwa 70W an.
Fabian B. schrieb:> Würde dann noch eine Funktion schreiben, der man einfach die> Ladeleistung vorgibt, die dann je nach dem den Strom setzt
Das mache ich in Home Assistant. Ich rechne da einfach aus welchen Strom
ich für die gewünschte Leistung setzen muss.
Dear people of this thread,
Thanks a million! I also ordered a MeanWell NPB (-1700-48) for my DIY
home battery to be steered by CAN-BUS. I'm now gathering all bits and
pieces (do not have a actual battery yet). But like the title of this
tread, the charger did not listen to commands (it did acknowledge the
CAN-BUS messages though). Again just for reference (like Matej L. in a
previous contribution): COMMANDS HAVE TO BE SENT WITH SWAPPED LOW AND
HIGH BYTES, thus reading from the manual e.g. set system_config
(0x00c2), you have to sent 0xc2, 0x00. I know, it is in the manual, but
I guess many of us are first time CAN-BUS users.
Next, some fields from the charger (e.g. manufacturer date) where messed
up (showing 160119, a number that showed up again in the serial number
of the charger: 000076 + 160119) I do not know. Firmware shows: 0f 0b
ff ff ff ff So, if I divide (like some previous code sample showed) the
first byte, firmware is 1.5 (?) Anybody know the purpose of the second
byte that has value 0x0b?
I could write 0x03, 0x04 to 0xc2, 0x00 and the value of 4 (the famous
bit 10) was sustained after power up, indicating it has the disabled
EEPROM write function. (again, I do not have a battery yet, so it all
has to prove itself).
That's all I have to share. Great thread. Happy to help others
(using raspberry pi 3B+ (lan), Waveshare 2-CH-CAN-Hat, NPB-1700-48 as
charger and OpenDTU together with Hoymiles HMS-500 as inverters)
And, oh yeah, the search term for the connector on the MeanWell NPB: JST
PHDR-14VS
Hallo zusammen,
da ich noch eine alte Firmware habe und denke, dass der Lader in Zukunft
den Geist aufgibt, überlege ich mir gerade einen anderen Lader zu
kaufen.
Kennt jemand den victron skylla-i 24/100?
Der funktioniert ebenfalls mit CANBUS.
Gruß Udo
Hello Udo, Greetings from India...I am going nuts over this CAN
communication with NPB-1700..
I have used, Arduino UNO board with MCP2515, Waveshare USB- CAN
Converter and other peripherals, But i am just unable to get the CAN
Data from Charger or communicate with it.
I Have followed your instruction about 120ohm resistance but still no
luck.
Can you please share link to your Arduino code code where i can check
how you have done he addressing. That will be really helpful..
since we all used espressif controllers and esphome to program it,
there's no arduino implementation.
however it should be no problem to adapt. take note of the
initialization with 8MHz clock and 250KBPS bit rate, right adresses as
well as the swapped low and high bytes as @markjoe stated.
and yes, you're correct, the CAN bus must be terminated by the mentioned
resistor. in my case I didn't notice my MCP2515 module needed the jumper
on its pcb to be bridged in order to terminate, which caused the
communication to not work at all. jumper set and it's all good. what
MCP2515 board do you use?
furthermore you have to make sure the power supply itself has the right
pin/jumper configuration. usually you should not need any jumpers or
extra wires besides of the CAN bus wires.
I'll attach some esphome code where you can see the addressing and so
on.








{kind=link}