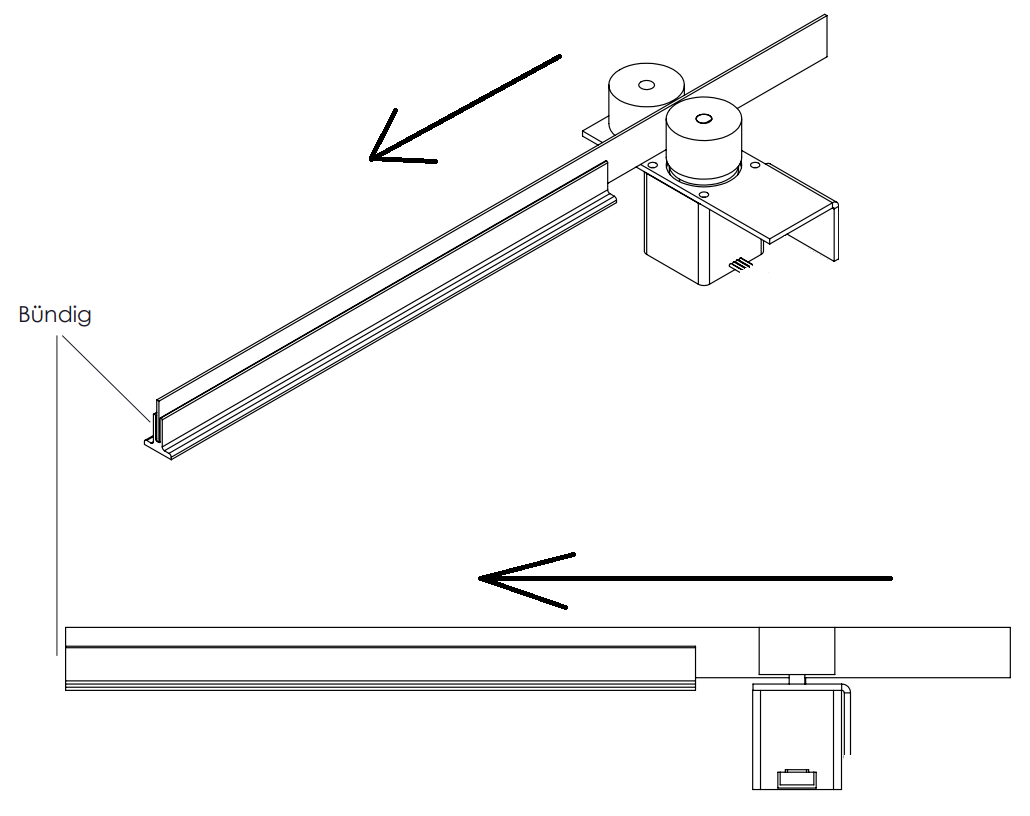
Hallo, ich habe ein Blech 2mm/30mm/300mm (Dicke/Höhe/Breite). Dieser wird mit einer elektrisch angetriebenen Rolle in eine Führung gefördert. Anbei eine Skizze. Wenn das Blech bündig mit der Außenkante des Führungsbleches ist, soll der Motor stehen bleiben. Wie kann das am besten gemacht werden? Einen Schrittmotor zu nehmen, der dann jedes Mal die gleichen Schritte abfährt, sobald ein Blech ergriffen wurde, erscheint mir unzuverlässig. Meiner Ansicht nach, sind hier mehr Sensoren notwendig, die eine Rückmeldung über die Position des Bleches geben. Für weitere Ideen und Tipps, bezüglich der Ausführung bin ich dankbar VG.
Angehängte Dateien:
-

Position_anfahren.png
65 KB
Heinrich S. schrieb: > Meiner Ansicht nach, sind hier mehr > Sensoren notwendig Deine Skizze enthält überhaupt keinen Sensor - natürlich muss mit einem Sensor erfasst werden, dass das Blech das Ende der Führung erreicht hat. Der Rest ist einfach, bloss den Motor abschalten. Informiere dich über Endschalter. Georg
Heinrich S. schrieb: > Wie kann das am besten gemacht werden? Anschlag und Freilauf; Motorstrom messen. Heinrich S. schrieb: > Einen Schrittmotor zu nehmen, der > dann jedes Mal die gleichen Schritte abfährt, sobald ein Blech ergriffen > wurde, erscheint mir unzuverlässig. Du brauchst eine Refernzmarke z.B. eine Lichtschranke, die erkennt, dass das Blech gegriffen wurde. Ab da sind es halt noch xy Schritte.
Georg schrieb: > Der Rest ist einfach, bloss den Motor abschalten. Wenn er ein selbssperrendes Getriebe hat. Ansonsten muss man izhn zumindest kurzschließen.
Heinrich S. schrieb: > Wenn das Blech bündig mit der Außenkante des Führungsbleches ist, soll > der Motor stehen bleiben. Auch du solltest in deinem Leben schon mal was von Beschleunigung und Bremsweg gehört haben. Wenn erst am Ziel signalisiert wird, dass man am Ziel ist, also vorher nicht bremsen kann, schiesst man über's Ziel hinaus. Heinrich S. schrieb: > Einen Schrittmotor zu nehmen, der dann jedes Mal die gleichen Schritte > abfährt, sobald ein Blech ergriffen wurde, erscheint mir unzuverlässig Wenn der Schrittmotor richtig ausgelegt ist, also nicht zu schwach und mit passenden Beschleunigungs- und Abbremsrampen und zur Vermeidung von stalling mit Mikroschritt betrieben wird, passiert das nicht. Schrittmotore brauchen kein feedback. Wenn natürlich unbekannt ist ob dein Blech hakt, wie lang es ist, dann hilft der Schrittmotor nicht. Nit einem einfachen Motor gehen einen Anschlag fahren ist natürlich eine gute Lösung, den muss man nicht nach Last sondern kann ihn auch nach Zeit abschalten, aber du wirst bestimmt gleich mitteilen, warum diese Lösung bei dir nicht geht und du das nur aus Faulheit^WVersehen nicht schon in deiner Frage beschrieben hast.
Natürlich wieder mal Salamitaktik! Gleich sagt der TO dass vorne an der Führung kein Platz für darf kein ist unmöglich... Sonst wäre es ja kein Problem! Lichtschranke, Endschalter, Anschlag, so viele Möglichkeiten! Gruss Chregu
Geben Sie die Vorschubgeschwindigkeit und die Werkstückwechselzeit an. Geben Sie 2 Bilder an: - Ausgangsposition des Werkstücks - die Endposition des Werkstücks.
Heinrich S. schrieb: > Einen Schrittmotor zu nehmen, der > dann jedes Mal die gleichen Schritte abfährt, sobald ein Blech ergriffen > wurde, erscheint mir unzuverlässig. Insbesondere hätte es nichts mit Regelung zu tun. Dafür ist ein Sensor Voraussetzung, anhand dessen Ist- und Sollposition aufeinander angeglichen werden können.
Angehängte Dateien:
-

gabellichtschranke.jpg
74 KB
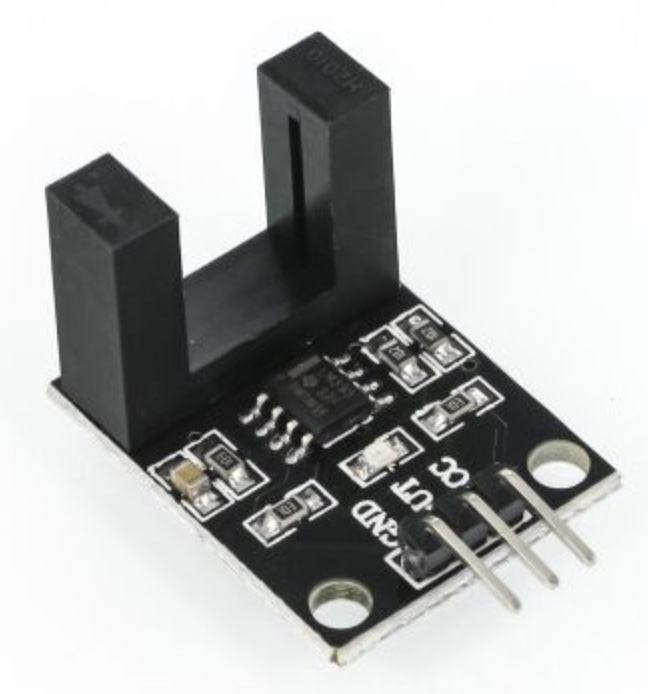
Schrittmotor ist schom kein schlechter Einstieg. Zunächst mit rel. hoher Geschwindigkeit den Blechstreifen bis ca. 1cm (oder weniger) vor die Endposition transportieren und dann in den "Schleichgang" schalten, der jederzeit ohne Nachlauf angehalten werden kann. Als Sensor für das Stop-Signal würde ich eine Gabel-Lichtschranke verwenden, wie sie z.B. in Druckern zu tausenden verbaut sind ... DIe Kosten dürften im einstelligen Euro-Bereich liegen.
Heinrich S. schrieb: > Wenn das Blech bündig mit der Außenkante des Führungsbleches ist "Bündig" im Sinne von 0,000mm? Oder "bündig" wie "aufs zehntel genau"? Oder reicht auch eine Positioniergenauigkeit von +-1mm? > Wie kann das am besten gemacht werden? Wie schnell soll das Ganze gehen? Kann überstehendes Blech wieder zurückgezogen wwerden? Wenn ja, dann könntest du das Blech "überpositionieren" und wieder ein paar Schritts auf die Sollposition zurückfahren.
Frank E. schrieb: > Zunächst mit rel. hoher Geschwindigkeit den Blechstreifen bis ca. 1cm > (oder weniger) vor die Endposition transportieren und dann in den > "Schleichgang" schalten, der jederzeit ohne Nachlauf angehalten werden kann. Das ist eher Zeitverschwendung und dauert unnötig lange. Schneller geht es, wenn die Lichtschranke vor der Endposition positioniert ist. Dann kann bei voller Fahrgeschwindigkeit die Lichtschranke erkannt werden und anhand des bekannten Abstandes zwischen Lichtschranke und Endposition genau an der richtigen Position die Bremsrampe eingeleitet werden - keine Schleichfahrt, sondern Bremsung mit Anhalten auf dem Punkt.
Idee 1: Gabellichtschranke zwischen Schrittmotor und Führung. Blech wird vom Motor erfasst und wandert durch die Schranke. Ab hier noch X Schritte (auch mit Rampe). Idee 2: Die Führung ist aus Alu und eloxiert (also isoliert). Die Motorachse erfasst das Blech mit elektrischem Kontakt. Wird das Blech in die Führung geschoben, steigt die Kapazität zwischen Motorwelle und Aluführung. Spule dazu, Schwingkreis -> PLL -> Steuerspannung auf den Motor. Mit der Referenzfrequenz wird vorgegeben, wie weit das Blech hinein fährt. Wird die Referenzfrequenz unterschritten, fährt der Motor auch wieder zurück. Vielleicht. Gruß Jobst
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.