Hallo, ich beschäftige mich mit H Brücken für Gleichstrommotoren. Funktion soweit klar, z.B der L293. Was genau passiert im Bremszustand, wenn also beide Eingänge IN1 und IN2 für eine Brücke den gleichen Wert haben? Mir ist klar, dass dann die beiden Motorphasen kurzgeschlossen sind, und durch die Bewegung des Motors wirkt er als Generator, was wiederum eine Spannung erzeugt, die der ursprünglichen entgegenwirkt, und dadurch die Spannung gegen die Bewegung wirkt. Was aber passiert, wenn man das direkt vom Laufbetrieb in den Bremsetrieb schaltet? Gibt es hier irgendwelche implementierten Sicherheitsmechanismen in Hardware, die ein "kontrolliertes" Bremsen ermöglichen? Gleiche Frage fürs Umschalten der Richtungen: nachdem das von Außen direkt möglich ist, indem beide Eingänge einfach invertiert werden, was passiert hier genau, gibt es auch hier einen Soft-Mechanismus, der langsam abbremst, umkehrt und langsam wieder beschleunigt? Ich hab das noch nie probiert, hab aktuell auch keinen rumliegen, aber ich stell mir das nicht ganz gesund vor, wenn diese Themen direkt umschaltbar sind... Danke!
Der L293 ist ein über 40 Jahre alter Motortreiber, der hat noch keine Schutzeinrichtungen integriert. Bei dem müsste man das alles extern hinzufügen.
Richard schrieb: > Was genau passiert im Bremszustand, wenn also beide Eingänge IN1 und IN2 > für eine Brücke den gleichen Wert haben? Kommt drauf an. > Mir ist klar, dass dann die > beiden Motorphasen kurzgeschlossen sind, und durch die Bewegung des > Motors wirkt er als Generator, was wiederum eine Spannung erzeugt, die > der ursprünglichen entgegenwirkt, und dadurch die Spannung gegen die > Bewegung wirkt. Stimmt soweit. > Was aber passiert, wenn man das direkt vom Laufbetrieb > in den Bremsetrieb schaltet? Dein Motor bremst maximal und verheizt alle Bewegungsenergie in seiner Wicklung. Naja, ein wenig bleibt auch im Treiber hängen, die Endstufen sind ja nicht verlustfrei. > Gibt es hier irgendwelche implementierten > Sicherheitsmechanismen in Hardware, die ein "kontrolliertes" Bremsen > ermöglichen? Nein. Das muss dein Mikrocontroller machen, indem er die PWM zum Treiber langsam runter fährt. > Gleiche Frage fürs Umschalten der Richtungen: nachdem das von Außen > direkt möglich ist, indem beide Eingänge einfach invertiert werden, was > passiert hier genau, Das gleiche wie oben, nur anders herum. Start mit maximalbeschleunigung, was aber auch Maximalstrom bedeutet. > gibt es auch hier einen Soft-Mechanismus, der > langsam abbremst, umkehrt und langsam wieder beschleunigt? Siehe oben. > Ich hab das noch nie probiert, hab aktuell auch keinen rumliegen, aber > ich stell mir das nicht ganz gesund vor, wenn diese Themen direkt > umschaltbar sind... Ist wie bei 180 auf der Autobahn in den (R)alleygang zu schalten ;-)
Richard schrieb: > Gibt es hier irgendwelche implementierten Sicherheitsmechanismen in > Hardware, die ein "kontrolliertes" Bremsen ermöglichen? Diode von GND nach OUT, Diode von OUT nach VCC. Damit ist eine Diode leitend und durch den BJT der Gegenseite fließt der Strom. Der L6205 hat wenigstens durchweg NMOS verbaut, braucht aber zusätzlich ein Stützkondensator am Bootstrap. NMOS leiten in beide Richtungen, wenn sie angesteuert werden. Wird z.B. bei der "verlustlosen" Verpolschutzschaltung mit MOSFET statt Diode so gemacht, oder auch bei BLDC-Leistungsendstufen, ... mfg mf
OK, danke schon mal für Eure Antworten! Eine weitere Frage noch: öfters ist auch von "Clamping" im Zusammenhang mit H Brücken die Rede. Was genau ist hiermit gemeint? Ich finde hierzu keine passenden Infos, kann mir hier jemand weiterhelfen, worum es hier genau geht? Danke!
H. H. schrieb: > Der L293 ist ein über 40 Jahre alter Motortreiber, der hat noch keine > Schutzeinrichtungen integriert. Bei dem müsste man das alles extern > hinzufügen. Und der regelmäßig explodiert.
Richard schrieb: > OK, danke schon mal für Eure Antworten! > > Eine weitere Frage noch: öfters ist auch von "Clamping" im Zusammenhang > mit H Brücken die Rede. Was genau ist hiermit gemeint? Das Klemmen (Begrenzen) der Spannung, welche vom Motor im Generatorbetrieb zurückgeliefert wird. Wenn dort eine große Schwungmasse dran hängt muss deren Energie irgendwo hin. 1.) Hartes Bremsen durch Kurzschluß des Motors. Die Energie wird im wesentlichen in den Motorwicklungen im Wärme umgesetzt. Das kann und will man oft nicht, auch deshalb, weil das mechanisch für alle Komponenten am stressigsten ist. 2.) Mehr oder weniger langsam die PWM runterfahren. Dabei wird aber die Energie vom Motor in die Stromversorgung des Treibers zurück gespeist. Wenn dort kein weiterer Verbraucher dran hängt, steigt diese an und kann so hoch werden, daß der Treiber durch Überspannung kaputt geht. Hier muss man die Spannung begrenzen, neudeutsch clamping. Das macht man entweder mit einer ausreichend leistungsstarken Z-Diode (bei kleinen Motoren), einer Z-Dioden Nachbildung mit Transistor oder einem geschalteten Leistungswiderstand (Bremschopper), der immer dann einschaltet, wenn die Versorgungsspannung des Treibers eine bestimmte Spannung überschreitet, z.B. 110%.
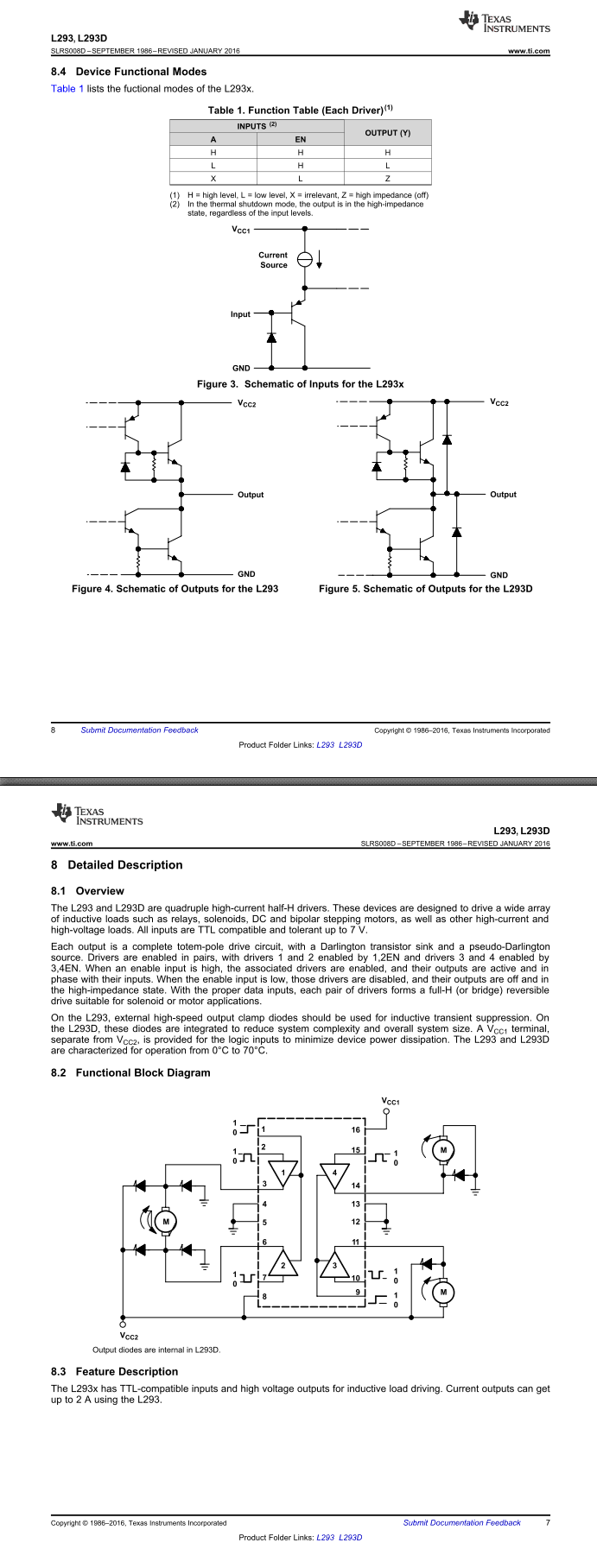
H. H. schrieb: > Der L293D enhält Clamping-Dioden, der L293 dagegen nicht. Naja, das ist eine andere Art von Klemmung. Die braucht DIESER IC (und alle anderen in Bipolartechnik), weil die NPN-Endstufen keinen Stromfluß rückwärts erlauben. Das braucht man aber in bestimmten Betriebszuständen mit PWM. Moderne ICs mit MOSFETs brauchen das nicht zwingend, denn dort wirken die parasitären Bodydioden, außerdem können die MOSFETs auch aktiv Strom im Inversbetrieb leiten.
Einige Rohm Chips, wie der BA6219 und der BA6238, haben die Dioden integriert. Das sind übrigens recht robuste Treiber im praktischen SIP Gehäuse.
Falk B. schrieb: > Naja, das ist eine andere Art von Klemmung. Das sind Klemmdioden, sie klemmen auf Vcc+0,7V und Vee-0,7V. Wo siehst du da eine "andere Art"?
H. H. schrieb: > Das sind Klemmdioden, sie klemmen auf Vcc+0,7V und Vee-0,7V. > Wo siehst du da eine "andere Art"? Es ist schon ein Unterschied, ob ich einen aktiv schaltenden Ausgang mit zwei normalen Dioden gegen VCC und GND begrenze oder eine Versorgungsspannung mit einer Z-Diode.
Falk B. schrieb: > H. H. schrieb: >> Das sind Klemmdioden, sie klemmen auf Vcc+0,7V und Vee-0,7V. >> Wo siehst du da eine "andere Art"? > > Es ist schon ein Unterschied, ob ich einen aktiv schaltenden Ausgang mit > zwei normalen Dioden gegen VCC und GND begrenze oder eine > Versorgungsspannung mit einer Z-Diode. Also hast du den Begriff Klemmschaltung falsch verstanden.
Danke schonmal für eure Antworten! D.h. der Begriff Clamping/Klemmen/Clamper etc wird auch für unterschiedliche Dinge verwendet? Das hier beschriebene Clamping mit den Dioden bei den H-Brücken hat wohl gar nichts mit diesen Themen hier zu tun: https://en.wikipedia.org/wiki/Clamper_%28electronics%29 Ist das korrekt?
Richard schrieb: > Ist das korrekt? Nein. Ganz allgemein bedeutet Klemmen ein Begrenzen der Spannung, meist mit Dioden oder Z-Dioden.
Falk B. schrieb: > Das Klemmen (Begrenzen) der Spannung, welche vom Motor im > Generatorbetrieb zurückgeliefert wird. Wenn dort eine große Schwungmasse > dran hängt muss deren Energie irgendwo hin. > > 1.) Hartes Bremsen durch Kurzschluß des Motors. Die Energie wird im > wesentlichen in den Motorwicklungen im Wärme umgesetzt. Das kann und > will man oft nicht, auch deshalb, weil das mechanisch für alle > Komponenten am stressigsten ist. OK, danke für diese ausführliche Antwort. Ich habe hier jetzt 2 Bilder: 1.) wenn ein Motor läuft und es wird hart gebremst (Phasen kurzgeschlossen), muss die kinetische Energie des Motors irgendwohin, der Motor arbeitet in dem Fall wie ein Generator. Durch Dioden könnte diese Energie abgeleitet werden. 2.) Wenn man eine Induktivität abschaltet (und die Motorwicklung ist ja induktiv), dann entstehen Induktionsspannungen auf Grund von U = L * di/dt. Grund: Die in der Induktivität gespeicherte Energie muss irgendwohin, die Induktivität versucht den Strom weiter zu treiben. Diese Energie wird üblicherweise durch Freilaufdioden abgeleitet. Punkt 1 und 2 sind ja nicht das gleiche oder? Das sind ja unterschiedliche Mechanismen / Gründe, und für beides wird irgendwie eine Diode verwendet, um die "Energie" abzuleiten. Wir das besprochene "Clamping" hier aus beiden Gründen gemacht?
Richard schrieb: > OK, danke für diese ausführliche Antwort. Ich habe hier jetzt 2 Bilder: > > 1.) wenn ein Motor läuft und es wird hart gebremst (Phasen > kurzgeschlossen), muss die kinetische Energie des Motors irgendwohin, > der Motor arbeitet in dem Fall wie ein Generator. Durch Dioden könnte > diese Energie abgeleitet werden. Nein. Wenn er kurzgeschlossen wird, brauchst du keine Dioden bzw. die können nichts sinnvolles bewirken. > 2.) Wenn man eine Induktivität abschaltet (und die Motorwicklung ist ja > induktiv), dann entstehen Induktionsspannungen auf Grund von U = L * > di/dt. Grund: Die in der Induktivität gespeicherte Energie muss > irgendwohin, die Induktivität versucht den Strom weiter zu treiben. > Diese Energie wird üblicherweise durch Freilaufdioden abgeleitet. Ja. > Punkt 1 und 2 sind ja nicht das gleiche oder? Nein. > Das sind ja > unterschiedliche Mechanismen / Gründe, und für beides wird irgendwie > eine Diode verwendet, um die "Energie" abzuleiten. Spannung zu begrenzen. Klar fließt dann Strom und somit Energie. > Wir das besprochene "Clamping" hier aus beiden Gründen gemacht? Nur der 2.
Mark S. schrieb: > Und der regelmäßig explodiert. Wenn man nicht in der Lage ist, den passend zu beschalten oder der Treiber für den Motor zu klein ist, kann das regelmäßig passieren - ja.
Falk B. schrieb: >> Diese Energie wird üblicherweise durch Freilaufdioden abgeleitet. > > Ja. Nein, es wird verhindert, dass eine hohe Induktionsspannung entsteht, indem der Strom über die Dioden weiter fließen kann. Die Freilaufdioden halten das dI/dt klein, sobald sie leiten. Die Energie baut sich durch die ohmschen Verluste in der Spule ab, d.h. Energie wird in Wärme umgewandelt.
Wolfgang schrieb: > Nein, es wird verhindert, dass eine hohe Induktionsspannung entsteht, > indem der Strom über die Dioden weiter fließen kann. Die Freilaufdioden > halten das dI/dt klein, sobald sie leiten. Die Energie baut sich durch > die ohmschen Verluste in der Spule ab, d.h. Energie wird in Wärme > umgewandelt. Klingt verständlich, danke! Falk B. schrieb: > Richard schrieb: >> OK, danke für diese ausführliche Antwort. Ich habe hier jetzt 2 Bilder: >> >> 1.) wenn ein Motor läuft und es wird hart gebremst (Phasen >> kurzgeschlossen), muss die kinetische Energie des Motors irgendwohin, >> der Motor arbeitet in dem Fall wie ein Generator. Durch Dioden könnte >> diese Energie abgeleitet werden. > > Nein. Wenn er kurzgeschlossen wird, brauchst du keine Dioden bzw. die > können nichts sinnvolles bewirken. OK, das sogenannte "Clamping" wird also nur für den Fall gemacht, dass beim Abschalten einer Induktivität die induzierte Spannung begrenzt wird. Beim Ableiten der Energie über die Freilaufdiode liegt so lange NUR DIE Durchflussspannung über der Diode, bis die gesamte Energie abgeleitet ist. Den Strom dafür muss die Diode natürlich aushalten... Das Clamping wird in diesem Fall einfach durch die Freilaufdioden realisiert, oder? Ist das korrekt? Wie wird dann der zweite Fall abgefangen, wenn die beiden Motoranschlüsse kurzgeschlossen sind, da wird doch auch eine ggf große Energiemenge einfach in den Leitungen in Wärme umgewandelt... Solange die Leitungen diesen Stromfluss "aushalten", ist das nicht weiter tragisch? Einzige Zusatzmaßnahme ist hier eventuell, dass man diesen Zustand eher meidet? Wenn man eine PWM langsam zurückregelt und den Motor dadurch bremst, wirkt er ja auch als Generator - hier wird die Energie etwas "langsamer" und schonender in das Speisesystem zurückgeführt... Oder? Danke!
Richard schrieb: > OK, das sogenannte "Clamping" wird also nur für den Fall gemacht, dass > beim Abschalten einer Induktivität die induzierte Spannung begrenzt > wird. Beim Ableiten der Energie über die Freilaufdiode liegt so lange > NUR DIE Durchflussspannung über der Diode, bis die gesamte Energie > abgeleitet ist. Den Strom dafür muss die Diode natürlich aushalten... > Das Clamping wird in diesem Fall einfach durch die Freilaufdioden > realisiert, oder? Ja. > Wie wird dann der zweite Fall abgefangen, wenn die beiden > Motoranschlüsse kurzgeschlossen sind, da wird doch auch eine ggf große > Energiemenge einfach in den Leitungen in Wärme umgewandelt... Solange > die Leitungen diesen Stromfluss "aushalten", ist das nicht weiter > tragisch? Naja. Wenn es ein kleiner Motor ist und das nicht oft passiert kann das OK sein. Bei größeren Motoren überhitzt dir irgendwann die Wicklung. Außerdem ist es mechanisch eine starke Belastung. > Einzige Zusatzmaßnahme ist hier eventuell, dass man diesen > Zustand eher meidet? > > Wenn man eine PWM langsam zurückregelt und den Motor dadurch bremst, > wirkt er ja auch als Generator Ja. > - hier wird die Energie etwas "langsamer" > und schonender in das Speisesystem zurückgeführt... Oder? Das ist aber der entscheidende Unterschied. Bei der Kurzschlußbremsung wird alle Energie im Motor in Wärme umgewandelt, bei der "sanften" Bremsung kann man in die Versorgung zurückspeisen. So wie es die E-Autos machen. Die laden den Akku, damit kann Energie zurückgewonnen werden, neudeutsch Recuperation.
Falk B. schrieb: > Richard schrieb: >> OK, das sogenannte "Clamping" wird also nur für den Fall gemacht, dass >> beim Abschalten einer Induktivität die induzierte Spannung begrenzt >> wird. Beim Ableiten der Energie über die Freilaufdiode liegt so lange >> NUR DIE Durchflussspannung über der Diode, bis die gesamte Energie >> abgeleitet ist. Den Strom dafür muss die Diode natürlich aushalten... >> Das Clamping wird in diesem Fall einfach durch die Freilaufdioden >> realisiert, oder? > > Ja. Hallo Falk, ganz bis ins letzte Detail ist mir das noch nicht klar: 1.) Wenn man eine induktive Last abschaltet, entsteht aus den beschriebenen Gründen eine Induktionsspannung welche durch die Freilaufdiode begrenzt wird, OK. (Unabhängig vom Motor, das kann in der Betrachtung auch eine andere induktive Last sein) 2.) Was aber ist mit der Spannung, die auf Grund der Rotation des Motors bei Abschalten induziert wird? Also die Umwandlung der mechanischen in elektrische Energie? Wird diese zur Induktionsspannung aus Punkt 1 addiert, und BEIDE werden durch die Freilaufdiode "geklemmt"? Das ist das was mir irgendwie noch unklar ist, es sind hier 2 verschiedene Spannungen aus meiner Sicht?! Danke!
Richard schrieb: > ganz bis ins letzte Detail ist mir das noch nicht klar: > > 2.) Was aber ist mit der Spannung, die auf Grund der Rotation des Motors > bei Abschalten induziert wird? Die ist ähnlich, aber nicht ganz gleich. Man muss bei Motoren und deren Ansteuerung mittels PWM zwei Effekte unterscheiden. 1.) PWM. In der EIN-Phase liegt die Versorgungsspannung an der Indukivität (Motorwicklung) an, der Strom steigt. In der AUS-Phase, in welcher der Motor kurzgeschlossen ist, wird der aber NICHT gebremst, denn der Strom fließt ja noch in positiver Richtung, fällt aber. Die magnetische Energie der Wicklung wird in mechanische Energie umgewandelt. Sozusagen ein magnetisches Schwungrad. 2.) Wenn der Strom negativ wird, dann arbeitet der Motor als Generator. Hier induziert nicht das Abschalten des Stroms die Spannung, sondern die Bewegung des Motors (Läufers), auch wenn das je nach Motortyp leicht unterschiedlich im Detail passiert. > Also die Umwandlung der mechanischen in > elektrische Energie? Wird diese zur Induktionsspannung aus Punkt 1 > addiert, Nein. > und BEIDE werden durch die Freilaufdiode "geklemmt"? Ja. Wobei man hier aufpassen muss. Ein Motor an einem Ein-Quadranten Steller, sprich, einfacher Transistor, kann NICHT rückspeisen! Der erzeugt dann eine Spannung, die proportional der Drehzahl ist und im Normalfall kleiner 100% Nennspannung. Erst mittels Zwei-Quadraten-Endstufe aus 2 Transistoren UND PWM kann man auch bei kleinen Drehzahlen wieder rückspeisen. Motoransteuerung mit PWM > Das ist das was mir irgendwie noch unklar ist, es sind hier 2 > verschiedene Spannungen aus meiner Sicht?! Ja.
Angehängte Dateien:
-

HBridge.PNG
34 KB
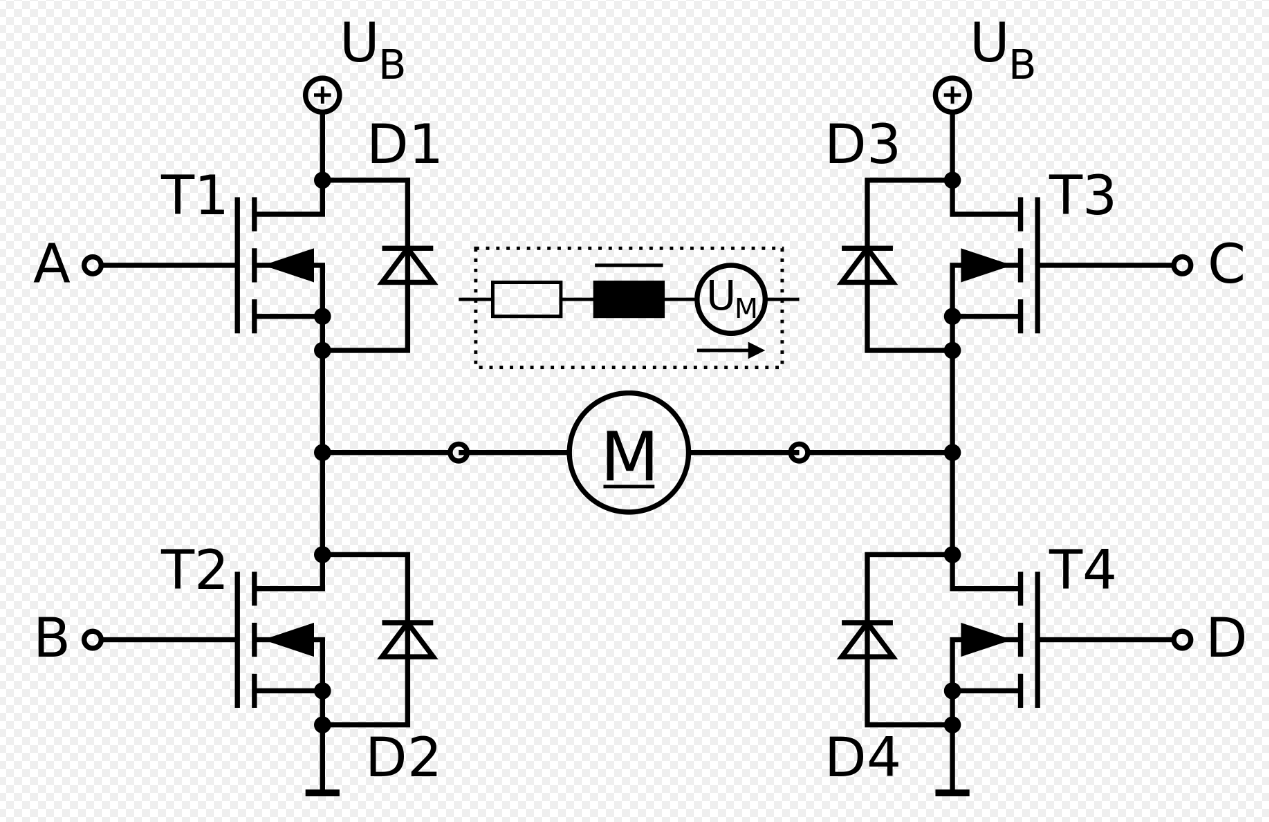
Falk B. schrieb: >> und BEIDE werden durch die Freilaufdiode "geklemmt"? > > Ja. Wobei man hier aufpassen muss. Ein Motor an einem Ein-Quadranten > Steller, sprich, einfacher Transistor, kann NICHT rückspeisen! Der > erzeugt dann eine Spannung, die proportional der Drehzahl ist und im > Normalfall kleiner 100% Nennspannung. Erst mittels > Zwei-Quadraten-Endstufe aus 2 Transistoren UND PWM kann man auch bei > kleinen Drehzahlen wieder rückspeisen. OK, ich meine hier auch einen Vierquadrantensteller, also eine Vollbrücke. Siehe Anhang. Falk B. schrieb: > 1.) PWM. In der EIN-Phase liegt die Versorgungsspannung an der > Indukivität (Motorwicklung) an, der Strom steigt. In der AUS-Phase, in > welcher der Motor kurzgeschlossen ist, wird der aber NICHT gebremst, > denn der Strom fließt ja noch in positiver Richtung, fällt aber. Die > magnetische Energie der Wicklung wird in mechanische Energie > umgewandelt. Sozusagen ein magnetisches Schwungrad. für die konkrete Vollbrücke im Anhang bedeutet PWM Betrieb (z.B. für eine Laufrichtung): PWM Signal an T1, T4 dauerhaft geschalten, T2 und T3 gesperrt. Warum ist der Motor dann über die Ausphase der PWM kurzgeschlossen? Weil T1 dann für diese Zeit sperrt und der Kurzschuss über D2 erfolgt? Ich dachte, wenn der (rotierende) Motor kurzgeschlossen wird, wird er gebremst?
Angehängte Dateien:
-

HBridge_aktive_PWM.PNG
28 KB -

HBridge_passive_PWM.PNG
29 KB
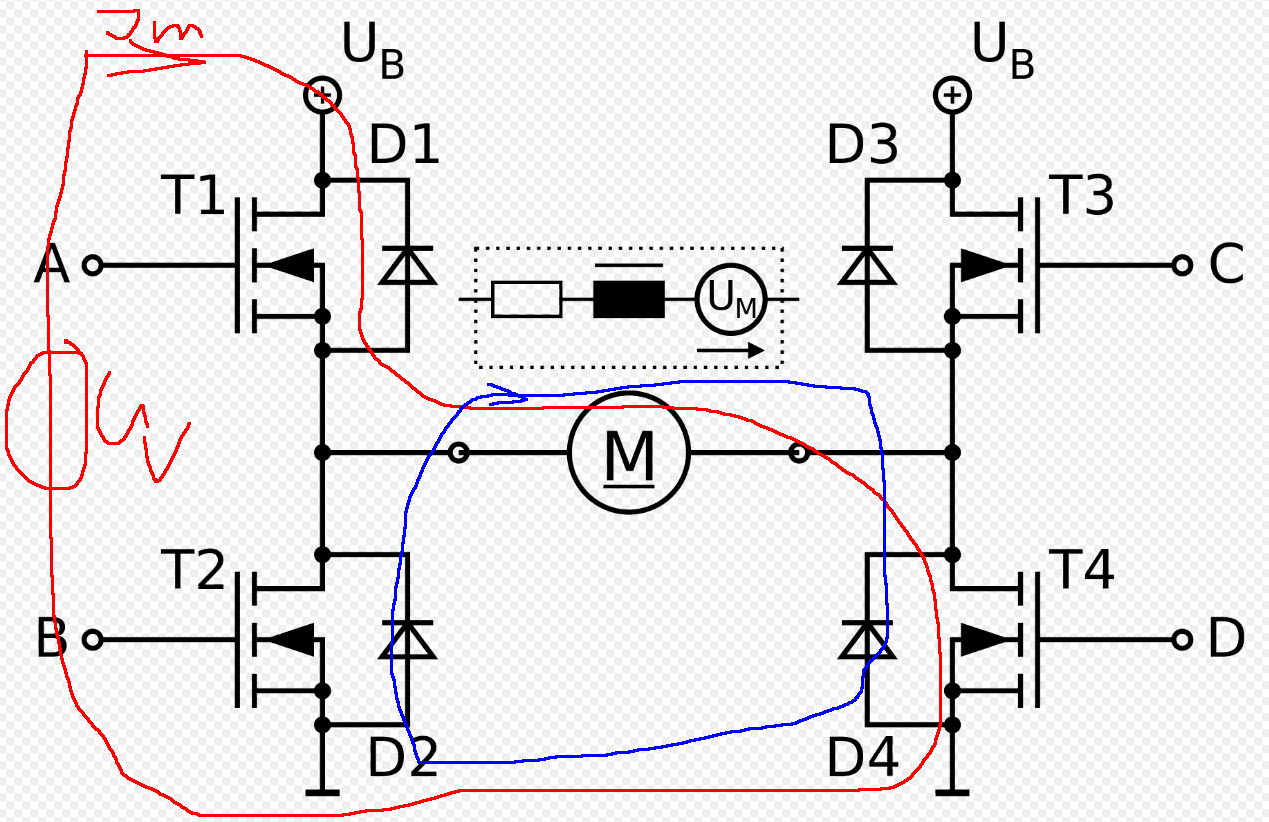
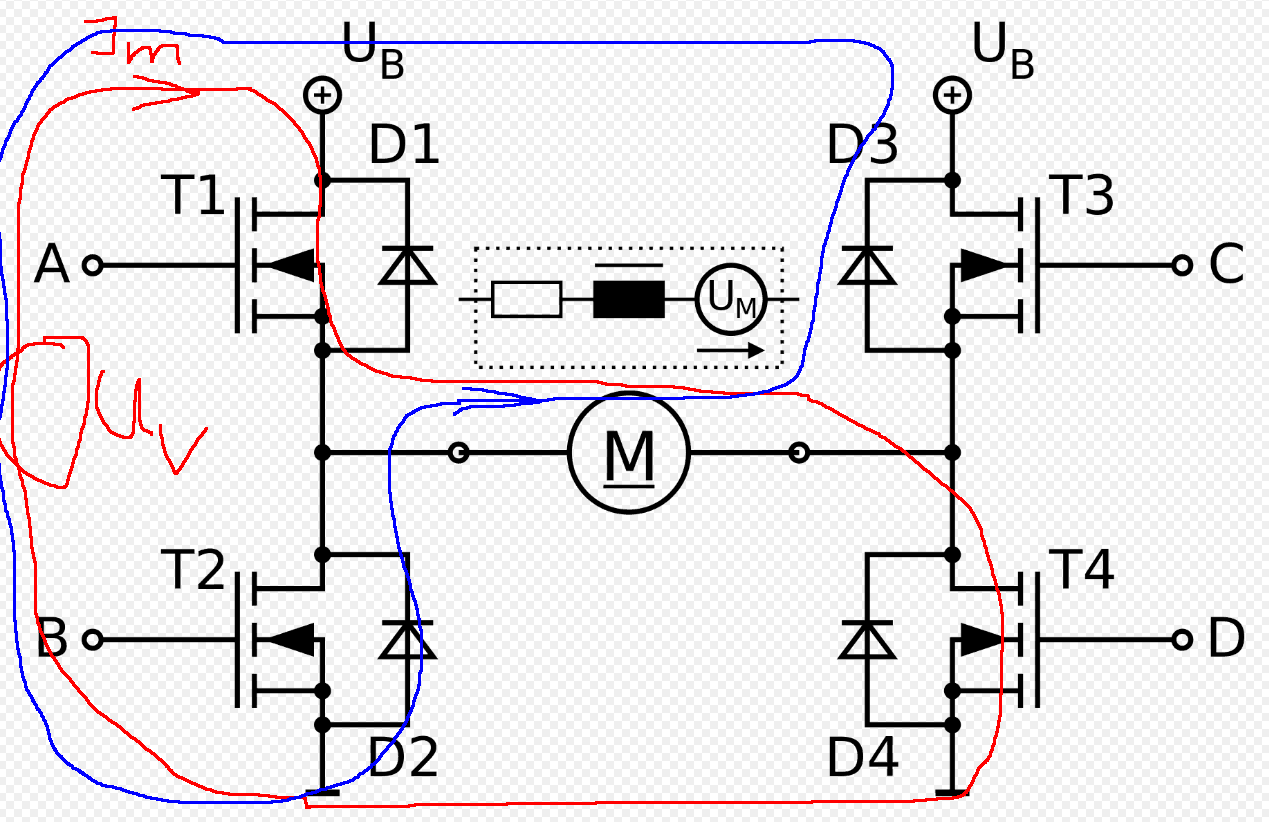
Richard schrieb: > OK, ich meine hier auch einen Vierquadrantensteller, also eine > Vollbrücke. > Siehe Anhang. Ist das Gleiche wie Zwei-Quadrantensteller, nur daß man auch die Richtung wechseln kann. > Falk B. schrieb: >> 1.) PWM. In der EIN-Phase liegt die Versorgungsspannung an der >> Indukivität (Motorwicklung) an, der Strom steigt. In der AUS-Phase, in >> welcher der Motor kurzgeschlossen ist, wird der aber NICHT gebremst, >> denn der Strom fließt ja noch in positiver Richtung, fällt aber. Die >> magnetische Energie der Wicklung wird in mechanische Energie >> umgewandelt. Sozusagen ein magnetisches Schwungrad. > > für die konkrete Vollbrücke im Anhang bedeutet PWM Betrieb (z.B. für > eine Laufrichtung): PWM Signal an T1, T4 dauerhaft geschalten, Kann man machen, ist aber eher ungünstig. Man schaltet immer eine Halbbrücke als Gesamteinheit. Also PWM an T1/T2 (invertiert mit Totzeit, das macht meist der Treiber selber), T3/T4 schalten nur statisch die Richtung um. > T2 und T3 > gesperrt. Warum ist der Motor dann über die Ausphase der PWM > kurzgeschlossen? Ist er nicht. In deiner Beschreibung wäre ja dann der Motor im echten mechanischen Freilauf (passive PWM) und die Energie der Wicklung wird in die Versorgung zurück gespeist. Diese Betriebsart wird manchmal verwendet, hat aber weniger Leitung am Motor. Siehe Anhang. So fließt der Stom in der EIN-Phase (rot) und AUS-Phase (blau) der PWM. Die aktive PWM schaltet immer T2/T2 (invertiert) und T4 dauerhaft ein. Siehe Anhang. Dann wird die Energie der Wicklung in mechanische Energie umgewandelt. > Ich dachte, wenn der (rotierende) Motor kurzgeschlossen wird, wird er > gebremst? Wird er auch. Aber erst wenn der Strom in den Wicklungen negativ wird.
Vielen Dank Falk! Deine Beschreibungen in diesem Forum sind immer wieder sehr hilfreich!
Angehängte Dateien:
-

Motor_test.png
95 KB -

Motor_1A.png
98 KB -

Motor_1B.png
99 KB -

Motor_2A.png
97 KB -

Motor_2B.png
98 KB
{kind=link}
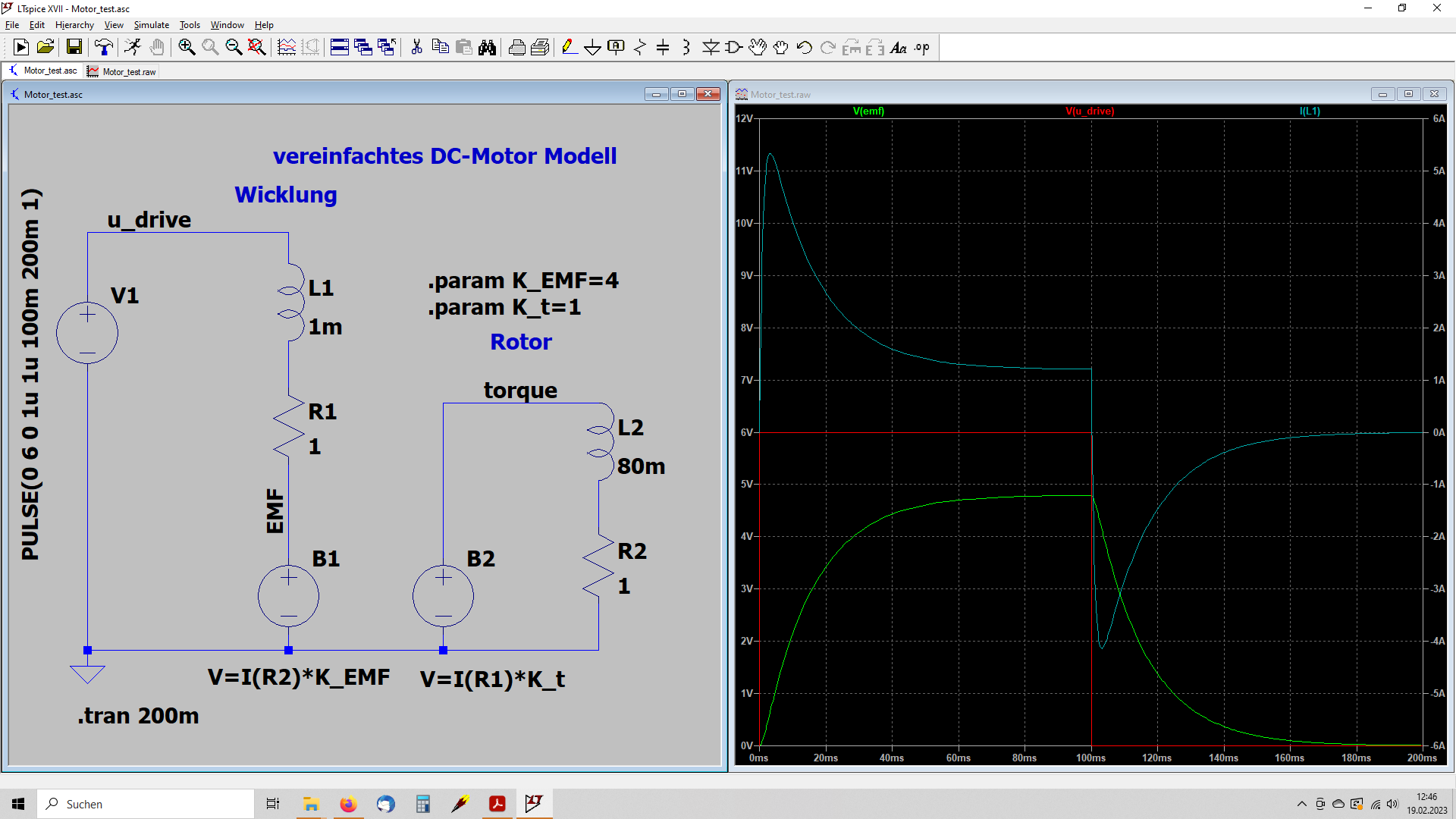
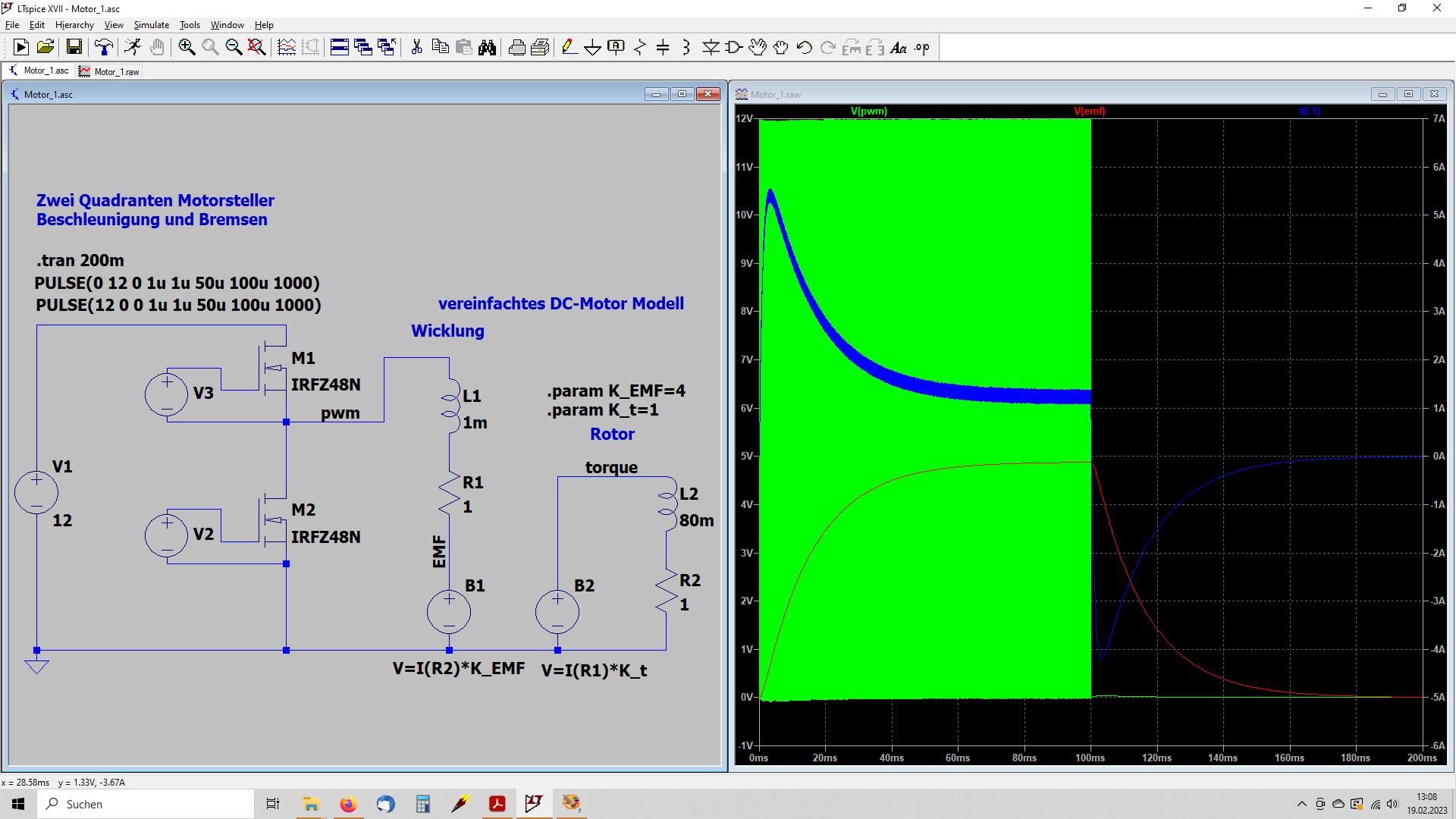
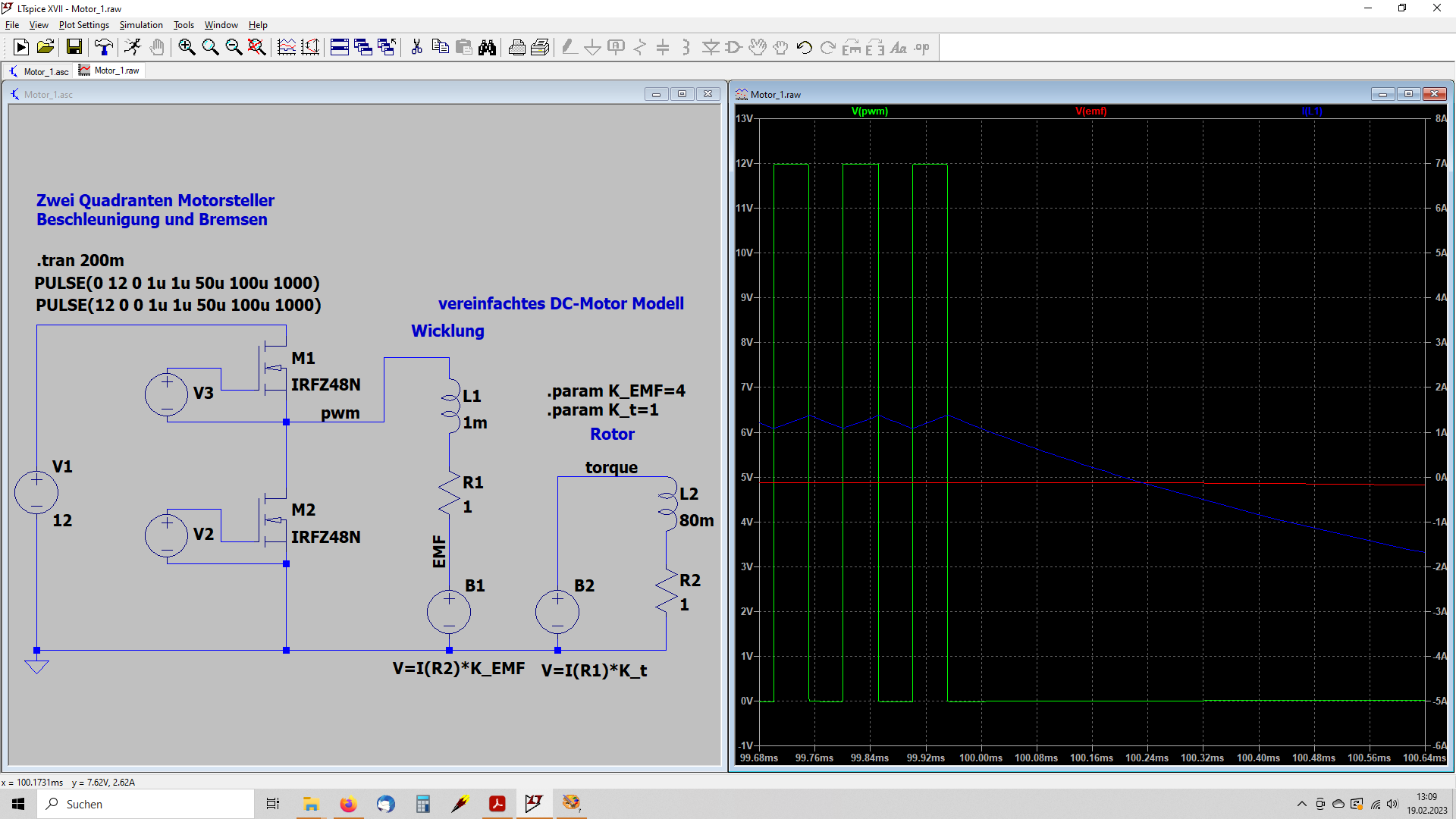
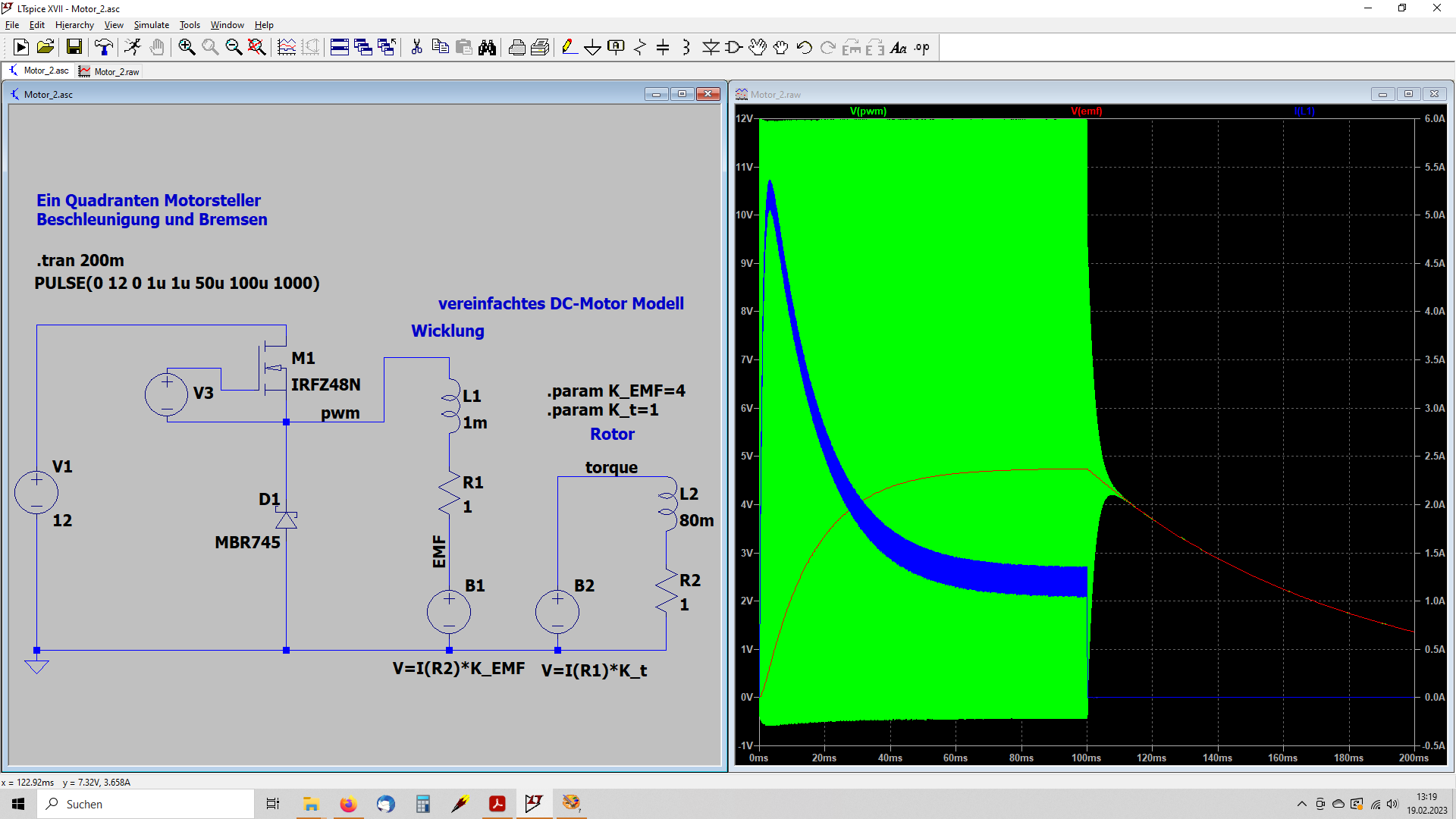
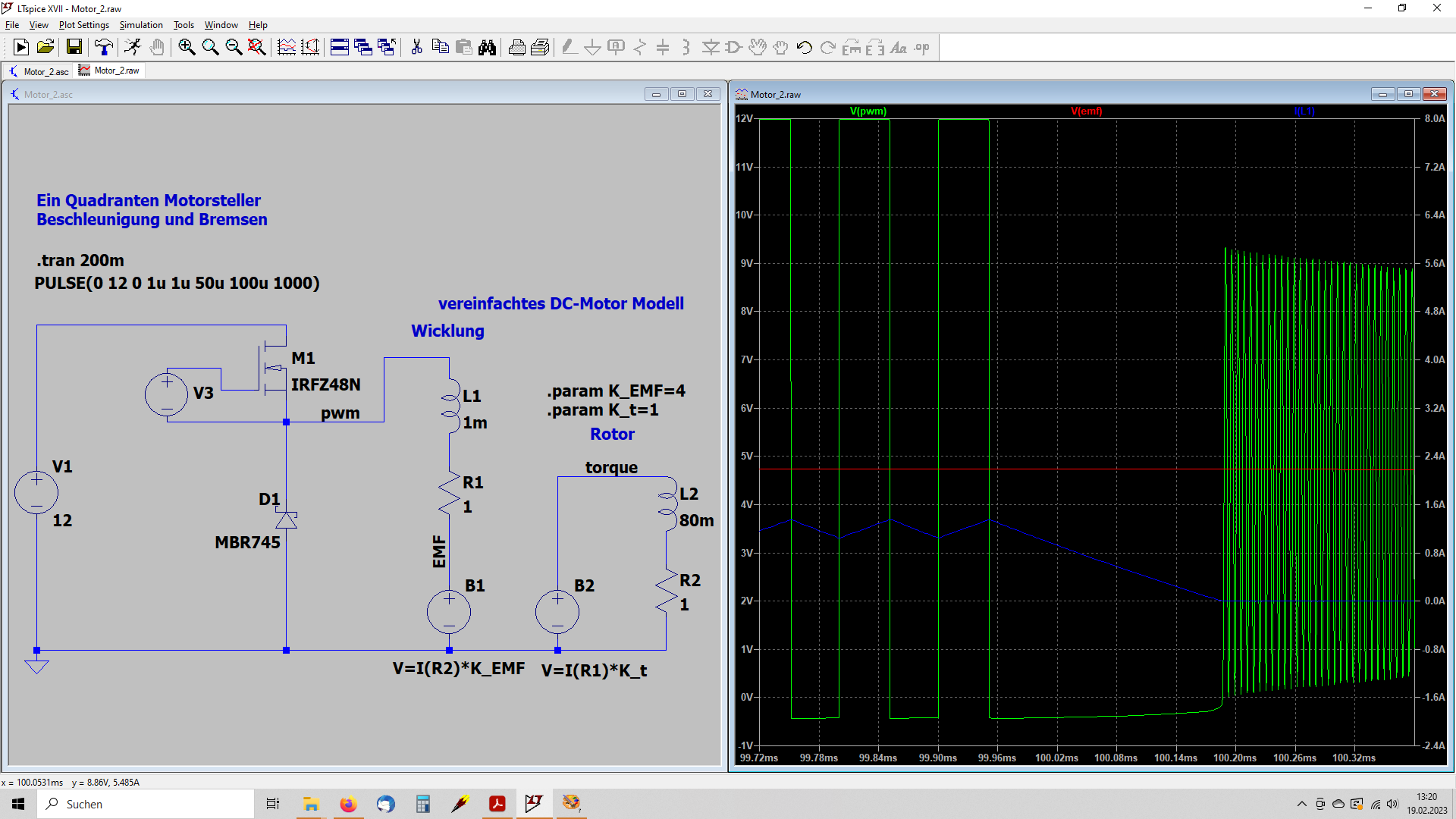
Ich hab mal was simuliert. Basierend auf einem einfachen DC Motor Modell. https://www.precisionmicrodrives.com/ab-025 Hier sieht man das prinzipielle Verhalten des DC-Motors beim Beschleunigen und Bremsen mit voller Spannung. Am Anfang wird der Strom nur durch den ohmschen Widerstand der Wicklung begrenzt, das ist der gefürchtete Blockierstrom. Den muss der Treiber aushalten oder elektronisch begrenzen. Die Wicklungsinduktivität kann nur den Anstieg etwas verlangsamen. Wenn der Motor in Bewegung kommt, steigt die Drehzahl und damit die induzierte Spannung in der Wicklung (EMF) und die Stromaufnahme sink deutlich. Beim Bremsen wird der Motor zum Generator und liefert Strom, der hier aber nahezu komplett im Wicklungswiderstand R1 verheizt wird. V(EMF) ist linear proportional zur Drehzahl I(R1) ist linear proportional zum Drehmoment V(Torque) ist das Drehmoment (elektrischer Ersatzparameter) I(R2) ist die Drehzahl (elektrischer Ersatzparameter) Mit PWM ist es praktisch der gleiche Verlauf, mit dem Unterschied, daß der Wechselanteil des Stroms sichtbar ist. Je größer die Wicklungsinduktivität oder PWM-Frequenz, umso kleiner wird der. Wie bereits gesagt, in den AUS-Phasen der PWM ist der Motor zwar kurzgeschlossen, der Strom fließt aber dennoch weiter in positiver Richtung und treibt den Motor an, auch wenn der Strom leicht fällt. Die Energiequelle ist die Wicklungsinduktivität L1. Erst beim Abschalten der PWM und dauerhaftem Kurzschluss wird der Strom negativ und es wird gebremst. Wie man am Modell sieht, gibt es zwei wesentliche Zeitkonstanten in einem (DC) Motor. Die elektrische der Wicklung und die mechanische des Rotors. Letztere ist in den allermeisten Fällen deutlich größer, so Faktor 10-100. In der 3. Simulation sieht man einen Ein Quadraten Steller. Der kann nicht aktiv bremsen, nur einen mechanischen Freilauf gewähren. Darum fällt die Drahzahl auch relativ langsam. Im Zip-Archiv sind alle Daten zusammengefaßt.
Noch ein paar Links zum Thema Modellierung von DC-Motoren https://sciamble.com/Resources/pe-drives-lab/basic-drives/dc-characterization https://www.precisionmicrodrives.com/ab-021
Hallo! Vielen Dank für die ausführlichen Infos! Eine kleine frage ist noch offen geblieben: Wenn ich einen DC Motor mit PWM zurückregeln (bremsen) will, dann wird ja abhängig von PWM High/Low gebremst bzw Energie in die Versorgung rückgespeist. Wenn z.B. bei der weiter oben abgebildeten H-Brücke an T2 ein PWM Signal gelegt wird, und T4 ist fix durchgeschalten, dann ist: - bei PWM High an T2 der Motor kurzgeschlossen (Bremswirkung) - bei PWM LOW an T2 fließt Strom über D1 zurück in die Versorgung (Rückgewinnung) wenn ich z.B. 25% Duty Cylce habe, dann wird zu 25% gebremst und zu 75% rückgeführt, kann man das so sagen? Das würde aber bedeuten, dass bei 0% Duty Cycle (sprich Dauer Low Signal bzw T2 durchgehend sperrend) die ganze Energie vom Generator zurückgespeist. Ist dann überhaupt eine "Bremswirkung" bemerkbar? Ist der Motor dann leichtgängig und "lauft nur durch Reibungsverluste aus" oder gibt es trotzdem eine "Bremswirkung", die aber kleiner ist, als wenn aktiv T2 eingeschalten wird? Danke!
Richard schrieb: > Wenn z.B. bei der weiter oben abgebildeten H-Brücke an T2 ein PWM Signal > gelegt wird, und T4 ist fix durchgeschalten, dann ist: > - bei PWM High an T2 der Motor kurzgeschlossen (Bremswirkung) > - bei PWM LOW an T2 fließt Strom über D1 zurück in die Versorgung > (Rückgewinnung) Nicht so einfach. Wenn man rückspeisen will, muss die PWM aktiv sein, sie darf nicht dauerhaft auf LOW oder HIGH stehen. Denn nur so kann bei niedrigen und mittleren Drehzahlen der Motor mit seinen Wicklungen als Hochsetzsteller arbeiten und ausreichend Spannung für die Rückspeisung erzeugen. > wenn ich z.B. 25% Duty Cylce habe, dann wird zu 25% gebremst und zu 75% > rückgeführt, kann man das so sagen? Nein. Die Rechnung ist komplizierter. > Das würde aber bedeuten, dass bei 0% > Duty Cycle (sprich Dauer Low Signal bzw T2 durchgehend sperrend) die > ganze Energie vom Generator zurückgespeist. Eben nicht. Siehe oben. > Ist dann überhaupt eine > "Bremswirkung" bemerkbar? Nö, denn dann ist der Motor im mechanischen Freilauf und es wird praktisch gar nichts zurück gespeist. > Ist der Motor dann leichtgängig und "lauft nur > durch Reibungsverluste aus" JA! > oder gibt es trotzdem eine "Bremswirkung", > die aber kleiner ist, als wenn aktiv T2 eingeschalten wird? Nein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.