Hallo, für eine magnetische Materialcharakterisierung möchte ich die Sekundärspannung eines Ringkerntrafos regeln. Dieser soll im geregelten Fall einen sinusförmigen Verlauf haben (trotz Nichtlinearitäten aufgrund des Materials; Hysterese...). Für die Regelung verwende ich einen uC (Arduino DUE). Das Referenzsignal wird über einen Funktionsgenerator vorgegeben und am uC mit der gemessenen induzierten Sekundärspannung verglichen. Über den uC (PID-Regler) wird eine Ausgangsspg. erzeugt, die über einen Leistungsverstärker die Primärspannung für den Ringkerntrafo vorgibt. Nun meine Frage: kann ich die Sekundärspannung überhaupt regeln, da ich ja immer eine Phasenverschiebung durch den Trafo bekomme und somit auch immer eine Phasenverschiebung zwischen Soll- und Ist-Signal entsteht. LG
Markus P. schrieb: > kann ich die Sekundärspannung überhaupt regeln Ja. > da ich ja immer eine > Phasenverschiebung durch den Trafo bekomme Kaum, die Phasenverschiebung ist gering, der ideale Trafo hätte keine. Bloss was macht in der Schaltung dein uC ? Der kann weder den Strom für den Trafo bereitstellen, noch enthält er den D/A Wandler zu dessen Ansteuerung, er müsste auch A/D wandeln um dein Funktionsgeneratorsignal zu erfassen, und mit etwas Pech ist er auch noch mit der Frequenz überfordert um den PID durchrechnen zu können. Wie wäre ein einfacher analoger linearer diskreter Audioverstärker ?
Vielen Dank für deine Antwort! :) ich habe aber de-facto eine Phasenverschiebung. Es sind selbst-bewickelte Ringronden mit Primär und Sekundärseite mit einem Eisenblech als "Füllmaterial", dessen Eigenschaften ich dann mittels der Messung umgerechnet über eine BH-Kennlinie charakterisieren möchte. Die Induktivität liegt dabei irgendwo im Bereich L~100uH und zusätzlich habe ich einen Leistungswiderstand in Serie dazu, da der analoge Verstärker bei zu geringem DC-Lastwiderstand Probleme bei seiner Linearität hat. Also habe ich eine Phasenverschiebung. Der verwendete Arduino DUE hat sowohl ADCs als auch DACs. Ich verwende 2 ADCs um das Referenzsignal sowie das gemessene Ist-Signal zu messen und einen DAC um das Signal auszugeben bzw. direkt auf den analogen Leistungsverstärker zu führen. Das sollte also soweit passen. Ich weiß nur nicht, ob die Phasenverschiebung, die durch das RL-Netzwerk entsteht durch den Regler irgendwie kompensiert werden kann oder ob die gemessene induzierte Spannung immer eine Phasenverschiebung zur Referenzspannung haben wird. Bei den ersten Messungen konnte ich diese Phasenverschiebung nämlich noch nicht kompensieren. LG
Markus P. schrieb: > ich habe aber de-facto eine Phasenverschiebung deswegen: Markus P. schrieb: > zusätzlich habe ich einen Leistungswiderstand in Serie dazu, da der > analoge Verstärker bei zu geringem DC-Lastwiderstand Probleme bei seiner > Linearität hat also im Prinzip selber Schuld. Passenden Amp nehmen. Dann gib den STROMnennwert mit deinen Funktionsgenerator vor, die Spannung folgt dann phasenverschoben. Man könnte precompensation machen, also einfach mal eine Sinuswelle durchlaufen lassen und für die NÄCHSTE Sinuswelle das Signal so korrigieren, dass man hofft, das Ergebnis wird ein guter Sinus, usw. Nur dafür reicht die Rechenleistung deines uC nicht aus.
Markus P. schrieb: > Das Referenzsignal wird über einen Funktionsgenerator > vorgegeben und am uC mit der gemessenen induzierten Sekundärspannung > verglichen. Markus P. schrieb: > kann ich die Sekundärspannung überhaupt regeln, da ich > ja immer eine Phasenverschiebung durch den Trafo bekomme und somit auch > immer eine Phasenverschiebung zwischen Soll- und Ist-Signal entsteht. Also Du möchtest NICHT den Effektivwert einer generierten Wechselspannung messen und regeln, sondern im Verlauf der Sinuswelle zu jeder Zeit möglichst genau den aktuellen Ausgangswert in Bezug auf den aktuellen Vorgabewert regeln. Richtig? mfg
ja genau. Ich möchte, dass meine induzierte Sekundärspannung den exakt gleichen Verlauf hat wie das Referenzsignal. Also zu jedem Zeitpunkt gleich ist. Quasi die selbe Amplitude und Phase. Die Phasenverschiebung könnte ich natürlich reduzieren, indem ich den Widerstand entferne, das ist mir bewusst. Trotzdem würde ich immer noch eine Phasenverschiebung haben (aufgrund von Hysterese, ...) also genau das, was ich dann auch zur Charakterisierung brauche. Meine Frage ist deshalb ganz allgemein, ob es möglich ist, diese Phasenverschiebung mit einer Regelung zu beheben und wenn ja, wie? LG
Markus P. schrieb: > ja genau. Ich möchte, dass meine induzierte Sekundärspannung den exakt > gleichen Verlauf hat wie das Referenzsignal. Also zu jedem Zeitpunkt > gleich ist. Quasi die selbe Amplitude und Phase. Das geht. Die Regelung muss dazu nur in die Zukunft schauen können. Hört sich exotisch an, ist aber bei einem periodischen Referenzsignal tatsächlich machbar. Änderungen der komplexen Last werden allerdings nur relativ langsam ausgeregelt. Die Regelung kann nur mit einer Totzeit von einer Periode der Referenz was regeln. Aber so, wie du deine Last beschreibst, ist sie ja ebenfalls Quasi-konstant. Dann sollte das absolut kein Problem sein. Hängt zu Beginn der Regelung ein wenig hinterher, daddelt sich aber dann ein. Und so lange weder Referenz noch Last sich nennenswert ändern, wird das passen.
das wäre genau das, was ich benötige! Während der Messung ändert sich die Last nicht und es können auch mehrere Perioden gemessen werden, bis das gemessene Signal eben passt. Aber wie realisiert man eine solche Regelung dann? Ist das ein einfacher PID-Regler oder um welche Art der Regelung handelt es sich hierbei? LG
Welche Art von Regelung wäre das bzw. wie kann ich diese am uC implementieren? LG
Angehängte Dateien:
-

Schaltbild.PNG
27 KB
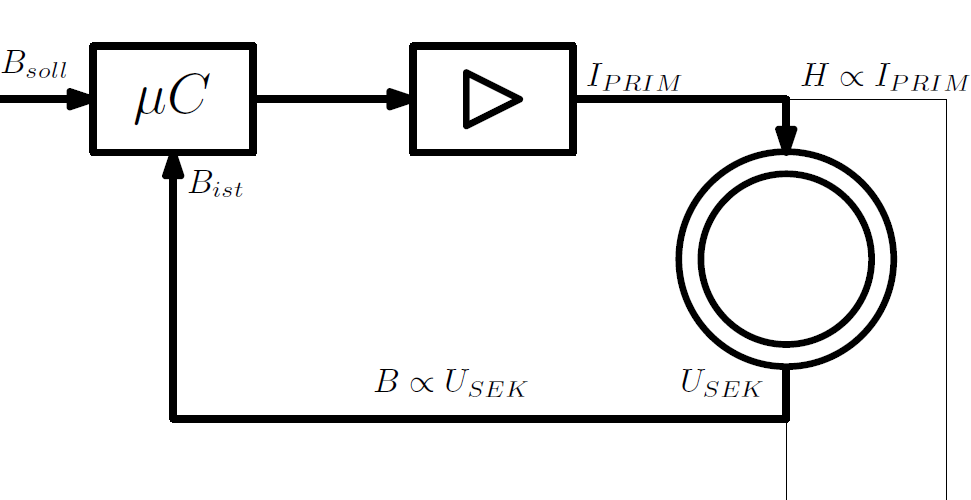
Hallo nochmal, ich bin inzwischen bei meinem Problem nicht wirklich weitergekommen und hoffe, dass vielleicht jetzt nochmal ein paar Ideen von euch kommen. Also ich will quasi die Sekundärspannung von einem kleinen, selbstbewickelten Ringkerntrafo regeln. (Zusätzlich wird der Primärstrom gemessen, damit kann eine Hysteresekurve des Materials im Ringkern erstellt werden ...) Für die Regelung verwende ich einen Arduino DUE und die Schaltung sieht wiefolgt aus (siehe Anhang): .) Sollsignal wird vom uC erzeugt (reiner Sinus) .) Istsignal wird vom uC gemessen .) uC erzeugt ein Ausgangssignal nach Reglervorschrift (momentan reiner P-Regler) .) Leistungsverstärker (Audioverstärker) verstärkt die Ausgangsspannung der Schaltung bzw. kann den nötigen Strom für die Schaltung liefern. .) Strecke: Trafo mit niederohmigen Leistungswiderstand in Serie. Sekundärspannung wird gemessen Anmerkung: Die Spannungspegel werden für den uC durch eine OPV Schaltung am Eingang und Ausgang angepasst, sodass die Spannungen für die analog Inputs in den richtigen Spannungsbereichen sind. Nun zu meinem Problem: Wenn die Verstärkung am Leistungsverstärker zu klein ist, wird die Schaltung nicht ausgeregelt. Dreht man die Verstärkung dann weiter auf, so wird die Schaltung plötzlich instabil und der Ausgang steuert nur mehr zwischen Maximum und Minimum aus. Woran könnte das liegen, hat da jemand von euch Ideen? LG
Markus P. schrieb: > Wenn die Verstärkung am Leistungsverstärker zu klein ist, wird die > Schaltung nicht ausgeregelt. Dreht man die Verstärkung dann weiter auf, > so wird die Schaltung plötzlich instabil und der Ausgang steuert nur > mehr zwischen Maximum und Minimum aus. > Woran könnte das liegen, hat da jemand von euch Ideen? Du weißt, dass ein P-Regler eine bleibende Regelabweichung hat? Mit einem P-Regler kannst du nie auf 0 kommen sondern dich nur so lange annähern durch vergrößern der Verstärkung bis das System instabil wird (wird auch kritische Verstärkung genannt, danach sucht man u.a. beim empirischen Einstellen eines PI/PID-Reglers)
Wenn du genug Speicher hast, reicht dir eventuell auch eine "Vorsteuerung". Du brauchst eine volle Periode im Speicher für das Fehlersignal. Dann gibst du einmal dein berechnetes Sollsignal aus und zeichnest das Istsignal auf. Die Differenz Speicherst du. Bei der nächsten Periode gibst du das Sollsignal abzüglich dem aufgezeichneten Fehlersignal aus. Den Fehler addierst du wieder auf dein Fehlersignal. usw. So sollte das Signal konvergieren und sich "einschwingen". Eventuell musst du noch einen Gainfaktor (<1) für die Fehlerkorrektur einführen, das kommt aber auf das Signal und die Fehler an.
Beitrag #7414892 wurde von einem Moderator gelöscht.
Beitrag #7414893 wurde von einem Moderator gelöscht.
Es gibt ja 2 Regelkreise. Der Eine passt die Ausgangskurvenform an. Der Andere die Amplitude. Man kann die Spannungsvorgabe als Sinusform in einer Tabelle halten und passt die Amplitude an. Die Amplitude kann man als mehrere Sinuskurven ablegen, und oder linear interpolieren. Natuerlich alles ohne Float. Jetzt laesst man einen langsamen gesampelten PI fuer die Amplitude laufen
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.