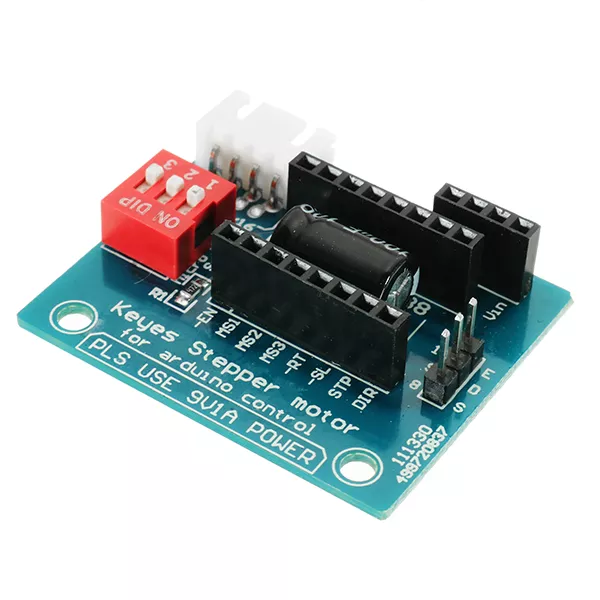
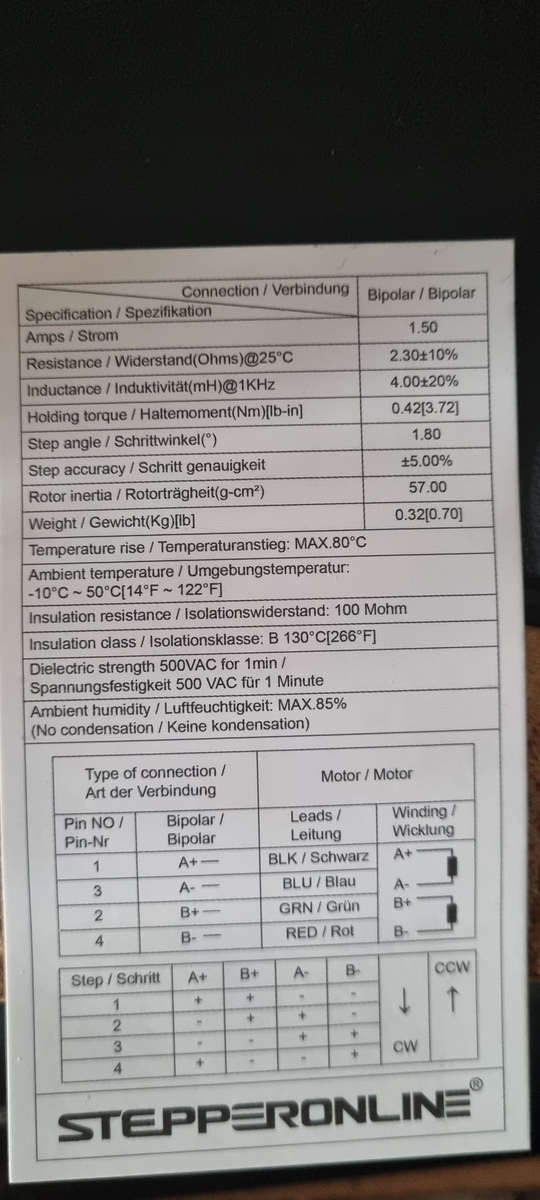
Hallo, Ich hoffe mal wieder auf Eure Hilfe. Da die anderen Projekte Pausieren versuch ich mich mal an Schrittmotoren. Ich habe einen Wemos D2 Mini mit dem Abgebildeten Board verbunden. Nun aber die Frage zum NEMA. Der Nema17 hat einen 6Pin Anschluss wobei nur 4 belegt sind. Ich bin jetzt schon den ganzen Tag dran da ich den Motor nicht schrotten möchte. Mein Problem ist das in der Anleitung zum Motor + und - Steht und nicht 2B 2A 1A 1B wie auf der Platine. Siehe Bild Es ist dieser Motor: https://www.amazon.de/STEPPERONLINE-Schrittmotor-42x42x39mm-3D-Drucker-Fr%C3%A4smaschine/dp/B0B38GX54H/ref=sr_1_6?keywords=Stepper%2BMotor%2BNema%2B17&qid=1683397133&quartzVehicle=93-258&replacementKeywords=stepper%2Bmotor%2Bnema&sr=8-6&th=1 Auch finde ich im Netz Zig Abbildungen die aber alle etwas andere sagen wie meine Anleitung. Irgendwie sind alle die ich im Netz finde da auch anders belegt. Kann mir da einer Bitte Helfen. Danke
Angehängte Dateien:
-

stepper-motor3.png
240 KB -

20230506_200813.jpg
240 KB
Es gibt nicht den Nema 17 Motor. Damit hast du den Flansch zur Befestigung bezeichnet. Frage den Händler nach den technischen Unterlagen oder schicke den Artikel mit einem entsprechenden Kommentar zurück.
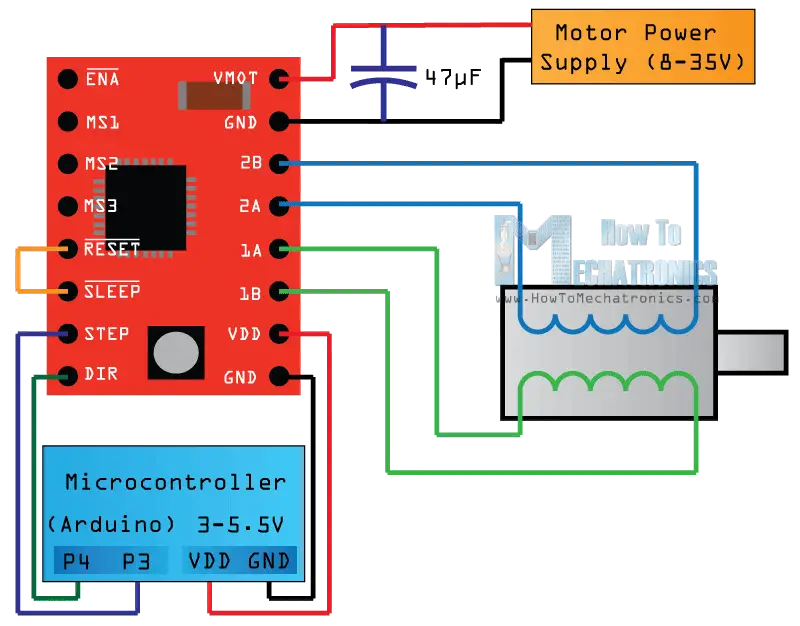
Michael L. schrieb: > Mein Problem ist das in der Anleitung zum Motor + und - Steht und nicht > 2B 2A 1A 1B wie auf der Platine. Hilft das? https://howtomechatronics.com/wp-content/uploads/2015/08/A4988-Wiring-Diagram.png?ezimgfmt=ng:webp/ngcb2 stammt von hier: https://howtomechatronics.com/tutorials/arduino/how-to-control-stepper-motor-with-a4988-driver-and-arduino/
Stefan F. schrieb: > Frage den Händler nach den technischen Unterlagen Ich nehme das zurück, steht ja alles im Angebot.
Wolf17 schrieb: > Michael L. schrieb: >> Mein Problem ist das in der Anleitung zum Motor + und - Steht und nicht >> 2B 2A 1A 1B wie auf der Platine. > Hilft das? > https://howtomechatronics.com/wp-content/uploads/2015/08/A4988-Wiring-Diagram.png?ezimgfmt=ng:webp/ngcb2 > stammt von hier: > https://howtomechatronics.com/tutorials/arduino/how-to-control-stepper-motor-with-a4988-driver-and-arduino/ Das hab ich auch gefunden. Ich hab jetzt mal mit B- 2B, B+ 2A, A+ 1A, A- 1B versucht. Er dreht zwar aber sehr unruhig mit hohen Vibrationen. Das sollte so ja nicht sein.Versorgt wird der Treiber mit 12V 2,5A Netzteil. Ich bräuchte einmal ein Bild mit der Wicklung wo aber + - drauf ist. Dann wäre es gelöst.
Welche Anschlüsse zu einer Spule zusammen gehören, kannst du mit einem Durchgangsprüfer herausfinden. Wenn er dann nicht läuft, ist eine der beiden Spulen falsch herum gepolt. Wenn er rückwärts dreht, sind beide verpolt.
Stefan F. schrieb: > Welche Anschlüsse zu einer Spule zusammen gehören, kannst du mit einem > Durchgangsprüfer herausfinden. > > Wenn er dann nicht läuft, ist eine der beiden Spulen falsch herum > gepolt. > > Wenn er rückwärts dreht, sind beide verpolt. Drehen tut er ja aber nur unruhig. So wie ich es jetzt habe. Die Drehrichtung ist irrelevant für dein Einsatz an einem Flügelrad. Aktuell gegen den Uhrzeigersinn.
Zuerst mal eine Spule drehen, dann schauen ob es geht. Ansonsten den Strom etwas höher einstellen. Das mit dem Anschluß hat dir stefanus erklärt. Weitere Infos hier: https://www.omc-stepperonline.com/de/nema-17-bipolar-45ncm-63-74-oz-in-1-5a-42x42x39mm-4-draehte-17hs15-1504s-x1
Sven B. schrieb: > Zuerst mal eine Spule drehen, dann schauen ob es geht. Ansonsten den > Strom etwas höher einstellen. Das mit dem Anschluß hat dir stefanus > erklärt. > > Weitere Infos hier: > > https://www.omc-stepperonline.com/de/nema-17-bipolar-45ncm-63-74-oz-in-1-5a-42x42x39mm-4-draehte-17hs15-1504s-x1 Werde ich morgen versuchen. Bei dem Link geht es schon wieder los. Das sollte der sein ist es aber nicht. Stecker am Nama anders belegt und auch in der Anleitung die da beilag steht es anders. Und so geht es mir den ganzen Tag schon. Mal ist 1und3 Spule A mal 1 und 4 usw. Und nirgends eine Angabe ob + links oder rechts ist.
Also in der Anleitung ist das Beschrieben, welche Spulen passen sollten. Gehe nicht nach den Farben, Kabel können falsch gekrimmpt sein. Nimm ein Messgerät und Messe die Spulen, es sollten ca. 0,4 Ohm sein. Wenn der Motor Zittert also versucht zu drehen, dann aber wackelt ist eine Spulenanordnung falsch. Bei einem 4988 musst du den Strom mit dem Poti einstellen. Da gibt es genug Info bei Google. Ich nutze mittlerweile die TB6600 Treiber. Da ist das mit dem Strom kein ding. sind halt etwas groß, aber laufen. Dann meine nächste Frage, welche Software Library nutzt du am Wemos D1.Im übrigen liegen an den Signalen zum vom Wemos D1 5 Violt an. Ich glaube eher nicht, das ist ein ESP der mit 3.3 Volt läuft. Läuft der 4988 auch mit 3.3 Volt Ansteuerspannung? Versuche die Verdrahtung mal mit einem Arduino 5 Volt Kompatibel. Ob du mal gemessen hast, frage ich jetzt mal nicht.
Michael L. schrieb: > Stecker am Nama anders belegt und > auch in der Anleitung die da beilag steht es anders. Stefan F. schrieb: > Es gibt nicht den Nema 17 Motor. Damit hast du den Flansch zur > Befestigung bezeichnet Nochmals, das (Nema-)Flanschmaß hat so garnichts mit den elektrischen Eigenschaften und Anschlüssen von deinem konkreten Stepper zu tun. Da darf jeder Hersteller machen was er will. Interessanter wäre: - Auf was für einen Ruhestrom hast du das ganze eingestellt? Kann dein Netzteil das überhaupt ab? - Mit was wird deine Welle belastet? Stepper mögen es nicht immer wenn sie zu wenige belastet werden, dann laufen sie sehr "ruppig". - Was nutzt du für eine Schrittfrequenz? - Wie sieht deine Beschleunigungs-/Brems-Rampe aus?
Ach ja, bei der Platine mit dem 4988 ist mir was aufgefallen: Use 9Volt 1 Ampere, das wird nichts, wenn der Steppermotor bis 2.5 Ampere haben kann.
Michael L. schrieb: > Ich bin jetzt schon den ganzen Tag dran da ich den Motor nicht schrotten > möchte. Den Motor schrottest du praktisch nur, wenn er zu heiß wird. Also stelle erstmal einen kleinen Strom ein und prüfe ab und zu mit der Hand die Temperatur des Motors. Solange er sich im Dauerbetrieb noch ein paar Sekunden anfassen lässt, ist alles im grünen Bereich. Michael L. schrieb: > Er dreht zwar aber sehr unruhig mit hohen Vibrationen. Was hast du als Last dran und welchen Mikroschrittmodus hast du eingestellt?
Sven B. schrieb: > Use 9Volt 1 Ampere, das wird nichts, wenn der Steppermotor bis 2.5 > Ampere haben kann. Ein Schrittmotor will keinen Strom haben. Der bekommt ihn zugeteilt. Der A4988 ist mit 35V und 2A_pk spezifiziert, d.h. das Drehmoment des Motors ist gegenüber einer Bestromung mit 2.5A etwas reduziert. Bei 2A ist allerdings auf ausreichende Kühlung des A4988 zu achten. Auf dem Keyes Board ist, bis auf den Kondensator, kein Bauteil verbaut, dass die Spannung auf 9V begrenzen könnte. Da heißt es also, einen Blick auf die Spannungsangabe auf dem Kondensator zu werfen und diese hier zu verraten. Stefan F. schrieb: > Wenn er dann nicht läuft, ist eine der beiden Spulen falsch herum > gepolt. > > Wenn er rückwärts dreht, sind beide verpolt. Wie kommst du auf derart schräge Ansichten? Wenn eine Spule verpolt ist, dreht sich ein bipolarer Schrittmotor rückwärts. wenn beide verpolt sind, bemerkst du es gar nicht.
Guten Morgen und Danke. Hier die Antworten Sven B. schrieb: > Also in der Anleitung ist das Beschrieben, welche Spulen passen > sollten. > Gehe nicht nach den Farben, Kabel können falsch gekrimmpt sein. Nimm ein > Messgerät und Messe die Spulen, es sollten ca. 0,4 Ohm sein. Wenn der > Motor Zittert also versucht zu drehen, dann aber wackelt ist eine > Spulenanordnung falsch. Bei einem 4988 musst du den Strom mit dem Poti > einstellen. Da gibt es genug Info bei Google. > > Ich nutze mittlerweile die TB6600 Treiber. Da ist das mit dem Strom kein > ding. sind halt etwas groß, aber laufen. > > Dann meine nächste Frage, welche Software Library nutzt du am Wemos > D1.Im übrigen liegen an den Signalen zum vom Wemos D1 5 Violt an. Ich > glaube eher nicht, das ist ein ESP der mit 3.3 Volt läuft. Läuft der > 4988 auch mit 3.3 Volt Ansteuerspannung? > > Versuche die Verdrahtung mal mit einem Arduino 5 Volt Kompatibel. > > Ob du mal gemessen hast, frage ich jetzt mal nicht. Aktuell hab ich den Wemos mit Tasmota geflasht Mit der A4988 Lib dazu. Anleitung nach: https://github.com/arendst/Tasmota/discussions/11731 Irgend W. schrieb: > Michael L. schrieb: >> Stecker am Nama anders belegt und >> auch in der Anleitung die da beilag steht es anders. > > Stefan F. schrieb: >> Es gibt nicht den Nema 17 Motor. Damit hast du den Flansch zur >> Befestigung bezeichnet > > Nochmals, das (Nema-)Flanschmaß hat so garnichts mit den elektrischen > Eigenschaften und Anschlüssen von deinem konkreten Stepper zu tun. Da > darf jeder Hersteller machen was er will. > > Interessanter wäre: > - Auf was für einen Ruhestrom hast du das ganze eingestellt? Kann dein > Netzteil das überhaupt ab? > - Mit was wird deine Welle belastet? Stepper mögen es nicht immer wenn > sie zu wenige belastet werden, dann laufen sie sehr "ruppig". > - Was nutzt du für eine Schrittfrequenz? > - Wie sieht deine Beschleunigungs-/Brems-Rampe aus? Aktuell ist noch der Testaufbau also der Motor hat gar keine Belastung. Später kommt ein Flügelrad ran das. Dies hier wird nachgebaut: https://www.thingiverse.com/thing:2260425 Rainer W. schrieb: > Sven B. schrieb: >> Use 9Volt 1 Ampere, das wird nichts, wenn der Steppermotor bis 2.5 >> Ampere haben kann. > > Ein Schrittmotor will keinen Strom haben. Der bekommt ihn zugeteilt. Der > A4988 ist mit 35V und 2A_pk spezifiziert, d.h. das Drehmoment des Motors > ist gegenüber einer Bestromung mit 2.5A etwas reduziert. Bei 2A ist > allerdings auf ausreichende Kühlung des A4988 zu achten. > Auf dem Keyes Board ist, bis auf den Kondensator, kein Bauteil verbaut, > dass die Spannung auf 9V begrenzen könnte. Da heißt es also, einen Blick > auf die Spannungsangabe auf dem Kondensator zu werfen und diese hier zu > verraten. > > Stefan F. schrieb: >> Wenn er dann nicht läuft, ist eine der beiden Spulen falsch herum >> gepolt. >> >> Wenn er rückwärts dreht, sind beide verpolt. > > Wie kommst du auf derart schräge Ansichten? > Wenn eine Spule verpolt ist, dreht sich ein bipolarer Schrittmotor > rückwärts. wenn beide verpolt sind, bemerkst du es gar nicht. JA er dreht sich gegen den Uhrzeigersinn. JA das auf dem Board soll ab heisen. Da der A4988 ja so betrieben werden möchte. Der A4988 läuft aber auch schon mit 5V. Kondensator ist ein 50V 100uf verbaut. Das Board sollte 9-42V vertragen. Aktuell wird das Board mit 5V vom Wemos USB und 12V 2,5A Netzteil betrieben. Natürlich mit Masse verbunden. Später kommt nur das 12V Netzteil und ein Buck auf 5V zur Versorgung des Wemos dran. So eben durchgemessen ROT GRÜN eine Spule und Schwarz Blau. Soweit sollte also mein Datenblatt Stimmen. DA ich den Motor ja durch verpolen nicht Schrotten kann. Versuch ich also weiter mein Glück mit Pins Tauschen. Zu Warm werden tut er nicht. Da ich ihn ja für die Tests nur paar Schritte maximal eine Umdrehung drehen lasse. Den A4988 hab ich noch nicht eingestellt ist auch noch kein Kühlkörper drauf. Aber wir gesagt läuft Aktuell immer nur paar Sekunden. Ich hab Paralle mal bei Amazon Nachgefragt. Da die Bewertungen ja alle dort Gut waren. DA hat einer nur die Mittleren gedreht. Das wäre dann A+ 1A, A- 1B, B+ 2A, B- 2B. Kann ich mir zwar nicht vorstellen aber kann ja nichts passieren. Außer das der nichts tut. Später wenn ich es mal habe werde ich genau den Selben Motor noch 5X bestellen. Da ich mehrere davon für Bekannte baue. Mit eigener Platine. DAher kann ich dann da alles umpolen. Also mit A+ 1A, A- 1B, B+ 2A, B- 2B. dreht er schon mal richtig rum. Aber immer noch sehr Ruppig. Auch wenn ich mit der Hand festhalte wird nicht ruhiger. Also nicht wie ich es von meinen 3D Druckern gewohnt bin.
Michael L. schrieb: > Drehen tut er ja aber nur unruhig. Die Ansteuerung muss natürlich zu dem passen, was die Mechanik gerade tut. Diese Motoren können z.B. nicht aus dem Stand heraus mit einer festen Drehzahl angesteuert werden, sondern man muss langsam bei 0 beginnend beschleunigen. Wenn die Ansteuerung der tatsächlichen Rotation zu weit voraus eilt, stottert der Motor. Das ist ganz normal. Also steuere den Motortreiber für den Anfang mit einer ganz kleinen Drehzahl an. Zum Beispiel eine Umdrehung pro Minute. Ich schrieb: >> Wenn er dann nicht läuft, ist eine der beiden Spulen falsch herum >> gepolt. Wenn er rückwärts dreht, sind beide verpolt. Rainer W. schrieb: > Wie kommst du auf derart schräge Ansichten? > Wenn eine Spule verpolt ist, dreht sich ein bipolarer Schrittmotor > rückwärts. wenn beide verpolt sind, bemerkst du es gar nicht. Ich habe darüber nochmal nachgedacht und stimme Rainer zu. Ich habe das mit einer anderen Anschluss-Art verwechselt. Plus und Minus sind bei diesem Motor für einen ersten Testlauf erst mal ganz egal. http://stefanfrings.de/mikrocontroller_buch/Einstieg%20in%20die%20Elektronik%20mit%20Mikrocontrollern%20-%20Band%202.pdf Kapitel 8.2 beschreibt das Funktionsprinzip dieser Motoren.
Stefan F. schrieb: > Michael L. schrieb: >> Drehen tut er ja aber nur unruhig. > > Die Ansteuerung muss natürlich zur Mechanik passen. Wenn die elektrisch > angelegten Signale nicht mit der tatsächlichen Rotation überein stimmen, > dann ruckeln diese Motoren. Das ist bei BLDC Motoren im Modellbau nicht > anders. Auch da muss die Software passend zur Hardware parametrisiert > werden. Da hab ich mich an: https://github.com/arendst/Tasmota/discussions/11731 gehalten. Außer das ich den ENABLE Pin weggelassen habe.
Michael L. schrieb: > Da hab ich mich an ... gehalten. Und welche Drehzahl ist das nun? Wenn so ein komplexer Aufbau mit so vielen Unbekannten nicht glücklicherweise auf Anhieb klappt, dann zerlegt man ihn in Teil-Komponenten. In deinem Fall solltest du den Motor mit Treiber und einer anderen Software testen, wo du die Drehzahl selbst (ganz niedrig) vorgeben kannst. Arbeite dazu mit dem dort verlinkten "Stepper driver tutorial" https://lastminuteengineers.com/a4988-stepper-motor-driver-arduino-tutorial/
Michael L. schrieb: > DA ich den Motor ja durch verpolen nicht Schrotten kann. Versuch ich > also weiter mein Glück mit Pins Tauschen. Vor dem Öffnen der Kontakte zu den Motorspulen IMMER die Versorgungsspannung abschalten. > Zu Warm werden tut er nicht. Da ich ihn ja für die Tests nur paar > Schritte maximal eine Umdrehung drehen lasse. Bei einem Schrittmotor fließt der Strom auch bei nicht drehendem Motor (Haltestrom) sobald er über den Enable-Pin vom Treiber freigegeben wird. Die Erwärmung ist dann im Stand genauso vorhanden. Mit deinem "weggelassenen" Enable-Pin hast du also wahrscheinlich Dauerbestromung. Wenn der Motor ohne Last zu ruppig läuft, reduziere den Strom und/oder gehe auf höheren Mikroschrittmodus.
Stefan F. schrieb: > Michael L. schrieb: >> Da hab ich mich an ... gehalten. > > Und welche Drehzahl ist das nun? Wenn so ein komplexer Aufbau mit so > vielen Unbekannten nicht glücklicherweise auf Anhieb klappt, dann > zerlegt man ihn in Teil-Komponenten. > > In deinem Fall solltest du den Motor mit Treiber und einer anderen > Software testen, wo du die Drehzahl selbst (ganz niedrig) vorgeben > kannst. > > Arbeite dazu mit dem dort verlinkten "Stepper driver tutorial" > https://lastminuteengineers.com/a4988-stepper-motor-driver-arduino-tutorial/ Ich hab jetzt mal eine andere Anleitung gefunden. Die sich nicht auf den A4988 bezieht sondern die Pins als PWM und Relais bezieht. Wenn ich dieser nachgehe dreht der Motor ruhig so wie er soll. Nur etwas zu schnell. Aber das bekomme ich auch noch raus. Rainer W. schrieb: > Michael L. schrieb: >> DA ich den Motor ja durch verpolen nicht Schrotten kann. Versuch ich >> also weiter mein Glück mit Pins Tauschen. > > Vor dem Öffnen der Kontakte zu den Motorspulen IMMER die > Versorgungsspannung abschalten. > >> Zu Warm werden tut er nicht. Da ich ihn ja für die Tests nur paar >> Schritte maximal eine Umdrehung drehen lasse. > > Bei einem Schrittmotor fließt der Strom auch bei nicht drehendem Motor > (Haltestrom) sobald er über den Enable-Pin vom Treiber freigegeben wird. > Die Erwärmung ist dann im Stand genauso vorhanden. Mit deinem > "weggelassenen" Enable-Pin hast du also wahrscheinlich Dauerbestromung. > > Wenn der Motor ohne Last zu ruppig läuft, reduziere den Strom und/oder > gehe auf höheren Mikroschrittmodus. Das hab ich als erstes gelesen. Daher ziehe ich vor jeder Änderung die 12V ab. Danke. Dann werde ich den Enabel wohl noch hinzufügen. Aktuell ist er trotz all der Tests nicht mal Handwarm. Aber ich lass es mal aufgebaut und beobachte es.
Michael L. schrieb: > Ich hab jetzt mal eine andere Anleitung gefunden. Die sich nicht auf den > A4988 bezieht sondern die Pins als PWM und Relais bezieht. > Wenn ich dieser nachgehe dreht der Motor ruhig so wie er soll. Manchmal machst du es einem echt schwer, dir zu folgen. Welche Anleitung war das? Was sind "die Pins"? Wie kann sich der Motor drehen, obwohl Relais angesteuert wurden? Was hat das mit PWM zu tun? > Wenn ich dieser nachgehe dreht der Motor ruhig so wie er soll. Was sagt dir das? Ich plädiere auf Softwarefehler, oder falsch konfiguriert.
Angehängte Dateien:
-

stepper.png
25 KB
{kind=link}
{kind=link}
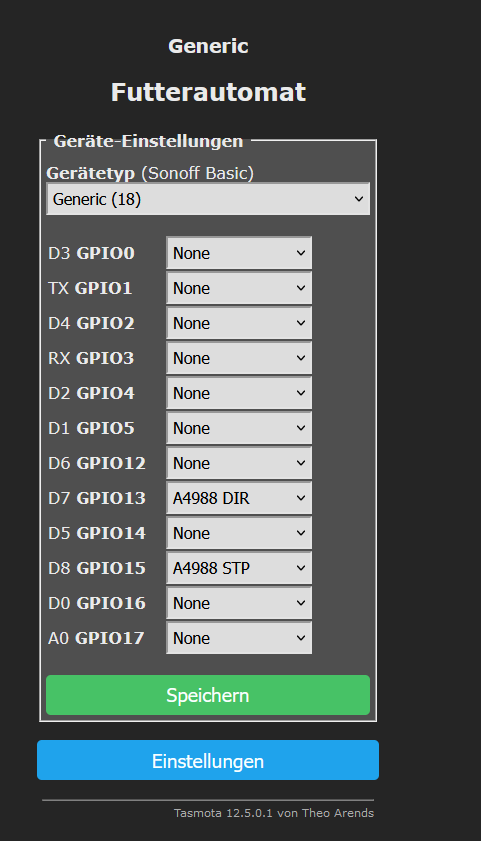
Stefan F. schrieb: > Michael L. schrieb: >> Ich hab jetzt mal eine andere Anleitung gefunden. Die sich nicht auf den >> A4988 bezieht sondern die Pins als PWM und Relais bezieht. >> Wenn ich dieser nachgehe dreht der Motor ruhig so wie er soll. > > Manchmal machst du es einem echt schwer, dir zu folgen. > > Welche Anleitung war das? > Was sind "die Pins"? > Wie kann sich der Motor drehen, obwohl Relais angesteuert wurden? > Was hat das mit PWM zu tun? > >> Wenn ich dieser nachgehe dreht der Motor ruhig so wie er soll. > > Was sagt dir das? Ich plädiere auf Softwarefehler, oder falsch > konfiguriert. Ich hab es jetzt mal im Tasmota so konfiguriert wie in: https://github.com/arendst/Tasmota/discussions/11731 Vorher war siehe Foto. OK, langsam wird der Motor doch warm. Also für Später das auch verbinden.
Michael L. schrieb: > dreht zwar aber sehr unruhig mit hohen Vibrationen. > Das sollte so ja nicht sein. Doch, das soll so sein, es ist ja ein Schrittmotor. Du brauchst eine mechanische Dämpfung (Welle zwischen den Fingern bremsen) und du musst mit Mikroschritten passend zur gewünschten Drehzahl ansteuern. Michael L. schrieb: > Ich hab jetzt mal eine andere Anleitung gefunden. Die sich nicht auf den > A4988 bezieht sondern die Pins als PWM und Relais bezieht. > Wenn ich dieser nachgehe dreht der Motor ruhig so wie er soll. Nur etwas > zu schnell So so. Etwas zu schnell. Warum hast du einen Schrittmotor gekauft ?
Michael B. schrieb: > Michael L. schrieb: >> dreht zwar aber sehr unruhig mit hohen Vibrationen. >> Das sollte so ja nicht sein. > > Doch, das soll so sein, es ist ja ein Schrittmotor. > > Du brauchst eine mechanische Dämpfung (Welle zwischen den Fingern > bremsen) und du musst mit Mikroschritten passend zur gewünschten > Drehzahl ansteuern. > > Michael L. schrieb: >> Ich hab jetzt mal eine andere Anleitung gefunden. Die sich nicht auf den >> A4988 bezieht sondern die Pins als PWM und Relais bezieht. >> Wenn ich dieser nachgehe dreht der Motor ruhig so wie er soll. Nur etwas >> zu schnell > > So so. Etwas zu schnell. Warum hast du einen Schrittmotor gekauft ? Das wird ja ein Futterautomat das ich der Verfressenen Bande das Dosieren kann und immer zur selben Uhrzeit. Das ich an Sonn Feiertagen mal ausschlafen kann. Außerdem ist per LIDAR Füllstandanzeige drin der mich per IOBroker/Telegramm warnt wenn nur noch 10% drin sind. Klar Normaler Motor hätte es auch getan. Aber wollte eh mal was mit denen machen.
Michael B. schrieb: > Doch, das soll so sein, es ist ja ein Schrittmotor. Ein Schrittmotor mit 1.8° und 1/16 Schritten bekommt eine ziemlich gute Sinus-Ansteuerung. Der sollte nicht sonderlich unruhig laufen. Da der aktuell konfigurierte Mikroschrittmodus ein Geheimnis zu sein scheint, kann der unruhige Lauf einfach an ungünstiger Konfiguration liegen ...
Rainer W. schrieb: > Michael B. schrieb: >> Doch, das soll so sein, es ist ja ein Schrittmotor. > > Ein Schrittmotor mit 1.8° und 1/16 Schritten bekommt eine ziemlich gute > Sinus-Ansteuerung. Der sollte nicht sonderlich unruhig laufen. > > Da der aktuell konfigurierte Mikroschrittmodus ein Geheimnis zu sein > scheint, kann der unruhige Lauf einfach an ungünstiger Konfiguration > liegen ... Wie Bereits Geschrieben läuft er jetzt wie er soll. Nur zu schnell. Nach dem Board steht er auf Half Steps. Ich kann nur die Tasmota einstellunge weiter geben: Run commands in the console to configure the motor operation: ShutterFrequency 2500 // This is a global variable for all steppers (default = 1000ppm). ShutterMotorDelay1 2.5 // Acceleration/deceleration speed for stepper motor(default = 0 seconds).
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.