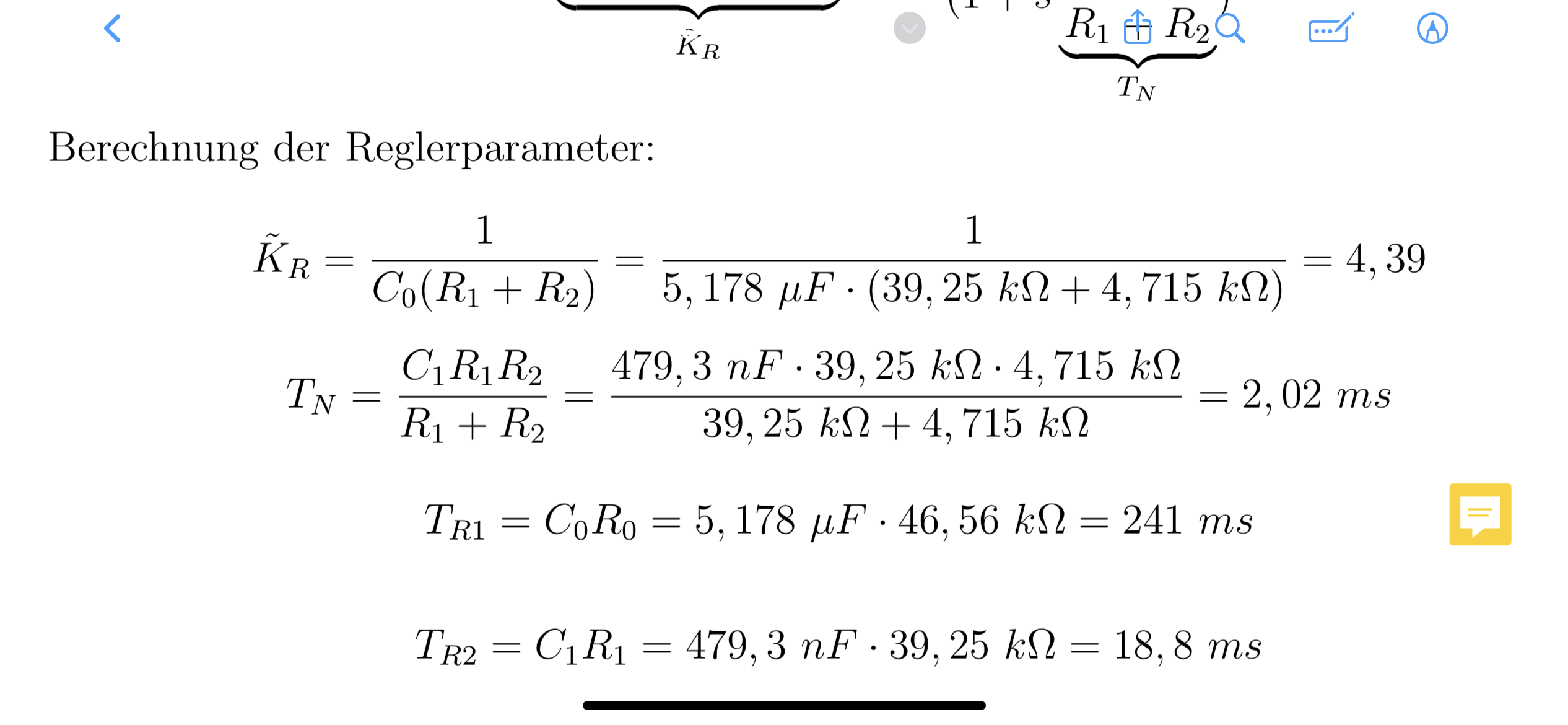
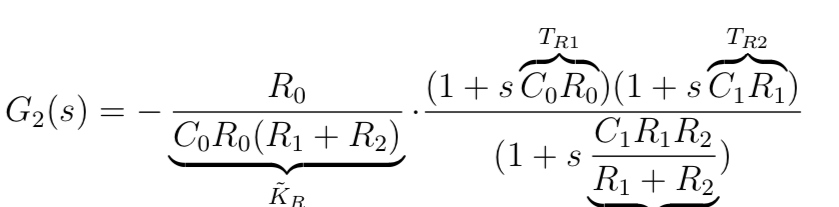
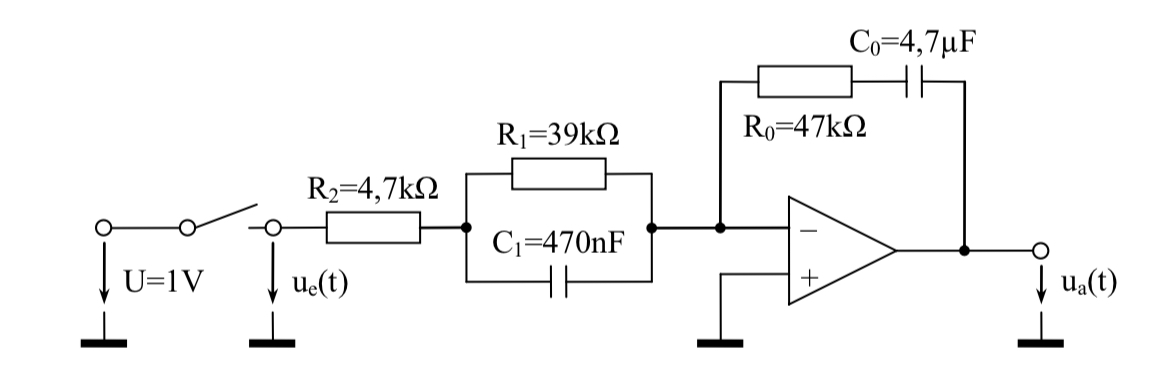
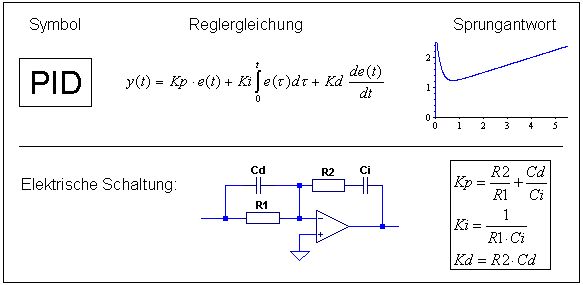
Hallo zusammen, ich bräuchte Hilfe bei einer Aufgabe hinsichtlich des PID-Reglers. Ich habe einen realen PID-Regler (siehe Schaltung), wofür ich die Übertragungsfunktion aufgestellt habe. Die ist auf dem anderen Bild zu sehen (ein s im Nenner habe ich vergessen zu notieren). Mein Problem ist jetzt, dass ich nicht weiß, wie ich die Vorhaltzeit Tv berechnen soll. Kann mir da jemand helfen?
Angehängte Dateien:
-

IMG_0302.png
290 KB -

IMG_0297.jpeg
51 KB -

IMG_0298.jpeg
63 KB
Ein PID-Regler hat die Form V*(1+sTi)/(sTi) * (1+sTv)/(1+sTvp) dabei ist Tvp eine unvermeidbar parasitäre Zeitkonstante mit V=R0/(R1+R2) und Ti=C0*R0 und Tv=C1*R1 passt das dann, wenn deine Gleichung G2(s)= richtig ist.
Hermann W. schrieb: > Ein PID-Regler hat die Form > V*(1+sTi)/(sTi) * (1+sTv)/(1+sTvp) > dabei ist Tvp eine unvermeidbar parasitäre Zeitkonstante > mit V=R0/(R1+R2) und Ti=C0*R0 und Tv=C1*R1 passt das dann, wenn deine > Gleichung G2(s)= richtig ist. Also die Gleichung sollte richtig sein. Die Funktion sieht wie die Ü-Funktion auf Wikipedia aus. Ich verstehe aber nicht, warum dann mein T_R2 mein T_V sein soll. Laut Wikipedia sind es nur einfache Zeitkostanten. Mein T_N sieht auch anders aus als deins. Mein Prof hat aber bei mir und anderen nicht darübre gemeckert, deshalb bin ich da ein wenig verwirrt. https://wikimedia.org/api/rest_v1/media/math/render/svg/92a18c79c60fdaea95833623ababb764798f896a
Ich weiß nicht, was du mit T_... meinst und was eine einfache Zeitkonstante ist, eine Zeitkonstante ist immer einfach: R*C. Man kann natürlich die Funktion auf unterschiedliche Art angeben. Ein Integrator sollte 1/sTi sein. Wenn Wiki Kreihe/s schreibt, ist die Verstärkung V und die Zeitkonstante Ti nicht getrennt worden. Den PI-Anteil schreibt man üblich als V*(1+sTi)/sTi weil man damit besser die Stabilitätskriterien berechnen kann. Du must das so machen, wie es dein Prof will. Also einfach die Faktoren so zusammenfassen, dass die Zielfunktion passt. Bei mir war das Ziel wie angegeben, also wie mein Prof das gelehrt hat.
Hermann W. schrieb: > Ich weiß nicht, was du mit T_... meinst und was eine einfache > Zeitkonstante ist, eine Zeitkonstante ist immer einfach: R*C. Man kann > natürlich die Funktion auf unterschiedliche Art angeben. Ein Integrator > sollte 1/sTi sein. Wenn Wiki Kreihe/s schreibt, ist die Verstärkung V > und die Zeitkonstante Ti nicht getrennt worden. Den PI-Anteil schreibt > man üblich als V*(1+sTi)/sTi weil man damit besser die > Stabilitätskriterien berechnen kann. Du must das so machen, wie es dein > Prof will. Also einfach die Faktoren so zusammenfassen, dass die > Zielfunktion passt. Bei mir war das Ziel wie angegeben, also wie mein > Prof das gelehrt hat. Also was ich meine ist, dass ich mein Ti (=Tn) über C1*R1*R2/(R1+R2) ausgerechnet habe (meine Kommilitonen auch) und der Prof nicht gemeckert hat. Über deinen Ansatz C0*R0 würde ich eben auf ein anderes Ergebnis kommen. Über meinen auf 1,97ms (ideale Bauwerte) und über deinen 221ms. Und ich verstehe jetzt nicht, warum da ein Unterschied ist (und warum meins wahrscheinlich falsch ist). Mein Prof sagt auch er ist zu beschäftigt um auf die Probleme einzugehen und ignoriert Fragen vor Ort und über Mail, weswegen ich es hierüber versuchen muss.
Wie sieht denn bei euch ein idealer PID-Regler aus? Das habt ihr doch sicher als erstes gelernt. Auf die Darstellung müßt ihr G2 anpassen. Dass R0*C0 für den I-Anteil zuständig ist, sieht man eigentlich mit etwas Erfahrung auf den ersten Blick, das kann man überall nachlesen. Und für den D-Anteil mit C1*R1 gilt das gleiche. R2 ist nur für die Realität zuständig, weil es real keinen idealen D-Anteil gibt. Wenn R2=0 ist, fällt die parasitäre Verzögerung weg.
Hermann W. schrieb: > Wie sieht denn bei euch ein idealer PID-Regler aus? Das habt ihr doch > sicher als erstes gelernt. Auf die Darstellung müßt ihr G2 anpassen. > Dass R0*C0 für den I-Anteil zuständig ist, sieht man eigentlich mit > etwas Erfahrung auf den ersten Blick, das kann man überall nachlesen. > Und für den D-Anteil mit C1*R1 gilt das gleiche. R2 ist nur für die > Realität zuständig, weil es real keinen idealen D-Anteil gibt. Wenn R2=0 > ist, fällt die parasitäre Verzögerung weg. Beim idealen PID war das ganze einfacher (auch mit der Herleitung der Formel, die Schaltung ist gleich nur R2 eben 0). Da ist Kd = C1*R0, Ki = 1/(C0*R1) und Kp = (C0*R0+C1*R1)/(C0*R1). Tn = Kp/Ki und Tv = Kd/Kp. Aber R2 macht eben vieles schwerer und führt mich eben zu der anderen Formelaufteilung mit TR1, TR2 und TP(?). Und ich weiß eben auch nicht, ob die "einfachen" Formeln in diesem Fall auch gültig sind.
Angehängte Dateien:
-

PID-Regler.png
4,7 KB
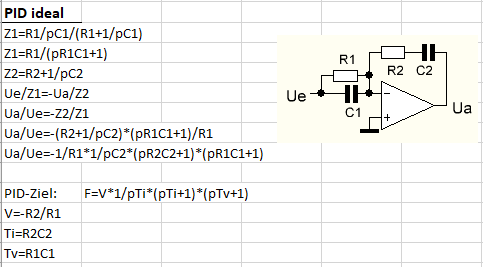
Da geht wohl einiges durcheinander, jedenfalls verstehe ich deine K.. nicht, da sie alle unterschiedliche Dimensionen haben. Deine R.. und C.. entsprechen auch nicht mehr der von dir angegebenen Schaltung. So kann ich das nicht kommentieren. Ein idealer PID-Regler sieht so aus wie in der Anlage. Du must nur noch mein p in dein s ändern. Für deinen realen Regler musst du nur den zusätzlich Widerstand in Z1 hinzufügen und wieder in deine Zielfunktion umformen.
Angehängte Dateien:
-

pid.gif
5,3 KB
{kind=link}
Auf dieser Seite sieht das auch wieder anders aus: https://rn-wissen.de/wiki/index.php/Regelungstechnik
Man muss erst mal entscheiden, was das Ziel ist. Will man die Konstanten der Differentialgleichung, des Zeitverlauf mit e-Funktion oder will man die Konstanten der Übertragungsfunktion. Das ist nicht das Gleiche und wenn man das vermischt, geht alles durcheinander. Du wolltest die Übertragungsfunktion und hast das über die komplexe Darstellung richtig hingeschrieben (mit fehlendem 1/s). Da du auch schon in die richtige Form mit sT+1 aufgelöst hast, bist du fertig und musst nur noch die Zeitkonstanten und die Verstärkung ablesen. Das habe ich dir in meinem 1. Beitrag hingeschrieben. Deine Beispiele aus dem Netz dienen nur zur Verwirrung, da sie Konstanten aus einer anderen Zielsetzung beschreiben.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.