Hallo, ich versuche gerade, nach der offiziellen Anleitung https://github.com/raspberrypi/pico-setup-windows/blob/master/docs/tutorial.md#creating-a-new-project ein erstes eigenes kleines Projekt für den Raspberry Pi Pico (siehe Anhang), bestehend aus einer einzigen C-Quelldatei, in Visual Studio Code unter Windows 10 zu bauen. Die Datei „pico_sdk_import.cmake“ sowie den Ordner „.vscode“ habe ich wie dort beschrieben in den Projektordner hinein kopiert, sowie die Datei CMakeLists.txt angepasst. Nachdem ich auf „Compile Active File“ klicke, wird auch scheinbar ohne Fehlermeldungen ein Compilerlauf durchgeführt und es entsteht ein Ordner „build“ mit allerlei gar lustigen Dateien – jedoch von den üblichen Output Files wie der gewünschten *.UF2 keine Spur. Kann mir jemand einen Tipp geben, was ich noch tun muss, damit selbige erzeugt wird? Von Makefiles und dergleichen habe ich leider bis jetzt noch keinen Plan. Viele Grüße Johannes
Ist sichergestellt, dass der pico arm crosscompiler verwendet wird?
Gerald K. schrieb: > Ist sichergestellt, dass der pico arm crosscompiler verwendet > wird? Ich denke schon: das „active kit“ ist „Pico ARM GCC, Pico SDK Toolchain with GCC arm-none-eabi“.
Johannes F. schrieb: > und es entsteht ein Ordner > „build“ mit allerlei gar lustigen Dateien Also *.haha, *.joke und *.funny?
Angehängte Dateien:
-

build-ordner.png
2,8 KB
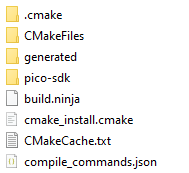
Harald K. schrieb: > Johannes F. schrieb: >> und es entsteht ein Ordner >> „build“ mit allerlei gar lustigen Dateien > > Also *.haha, *.joke und *.funny? Fast.^^ Ich hatte den Projektordner ja hochgeladen, siehe ZIP-Anhang im Eröffnungsbeitrag. Hier nochmal der Inhalt des Build-Ordners, die Ordner darin enthalten allerlei weitere Dateien und Ordner, die mir allesamt nicht viel sagen. Nix was nach den üblichen Binary-Dateien aussieht.
da wurden erstmal nur die makefiles generiert, aber noch nicht das binary. Es fehlt noch ein CMake Aufruf mit Angabe des build dir, oder in das build dir wechseln und 'cmake ..' aufrufen. Bzw. die Cmake Extension in VSCode verwenden, damit geht das komfortabel.
J. S. schrieb: > Es fehlt noch ein CMake Aufruf mit Angabe des build dir, oder in > das build dir wechseln und 'cmake ..' aufrufen. OK, ich habe jetzt „cmake -S C:\Users\User\Documents\Pi-Pico\isp_test -B C:\Users\User\Documents\Pi-Pico\isp_test\build“ im VS-Code-Terminal eingegeben und die folgende „Antwort“ bekommen:
1 | C:\Users\User\Documents\Pi-Pico\isp_test\build>cmake -S C:\Users\User\Documents\Pi-Pico\isp_test -B C:\Users\User\Documents\Pi-Pico\isp_test\build |
2 | PICO_SDK_PATH is C:/Program Files/Raspberry Pi/Pico SDK v1.5.1/pico-sdk |
3 | PICO platform is rp2040. |
4 | Build type is Debug |
5 | Using regular optimized debug build (set PICO_DEOPTIMIZED_DEBUG=1 to de-optimize) |
6 | PICO target board is pico. |
7 | Using board configuration from C:/Program Files/Raspberry Pi/Pico SDK v1.5.1/pico-sdk/src/boards/include/boards/pico.h |
8 | TinyUSB available at C:/Program Files/Raspberry Pi/Pico SDK v1.5.1/pico-sdk/lib/tinyusb/src/portable/raspberrypi/rp2040; enabling build support for USB. |
9 | Compiling TinyUSB with CFG_TUSB_DEBUG=1 |
10 | BTstack available at C:/Program Files/Raspberry Pi/Pico SDK v1.5.1/pico-sdk/lib/btstack |
11 | cyw43-driver available at C:/Program Files/Raspberry Pi/Pico SDK v1.5.1/pico-sdk/lib/cyw43-driver |
12 | Pico W Bluetooth build support available. |
13 | lwIP available at C:/Program Files/Raspberry Pi/Pico SDK v1.5.1/pico-sdk/lib/lwip |
14 | mbedtls available at C:/Program Files/Raspberry Pi/Pico SDK v1.5.1/pico-sdk/lib/mbedtls |
15 | Using PICO_EXAMPLES_PATH from environment ('C:\Users\User\Documents\Pico-v1.5.1\pico-examples')
|
16 | -- Configuring done |
17 | -- Generating done |
18 | -- Build files have been written to: C:/Users/User/Documents/Pi-Pico/isp_test/build |
Im zuletzt genannten Verzeichnis befindet sich aber leider immer noch kein Binary File. Es scheint genau derselbe Inhalt zu sein wie vorher ...
dann im build dir noch 'ninja' aufrufen. Das muss eventuell noch installiert werden, https://github.com/ninja-build/ninja/releases Das ist das eigentliche make. Oder über winget installieren mit 'winget install ninja-build.ninja'. In der Hoffnung das winget installiert ist :)
J. S. schrieb: > dann im build dir noch 'ninja' aufrufen. Ah super, hab es aufgerufen und – die Binary Files sind nun da. Vielen Dank! Komisch nur, dass das alles in der „Dokumentation“ mit keiner Silbe erwähnt wird.
cmake kann auch das make bzw ninja aufrufen, es müsste 'cmake --build <build-dir>' sein. Habe es jetzt auch schon eine zeitlang nicht mehr so benutzt und bin vergesslich geworden... Und PlatformIO ist etwas bequemer. Aber die CMake Extension ist wie gesagt auch sehr gut, muss man sich etwas reinarbeiten. Unten in der Statuszeile ist ein 'build' und eine Auswahl der Targets, damit müsste es auch gehen.
OK, vielen Dank nochmal für die Tipps. Muss ich mir alles mal in Ruhe ansehen. Der Test der ISP-Kommunikation mit dem AVR war schon mal erfolgreich. Ich habe die Signature Bytes via SPI auslesen können.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.