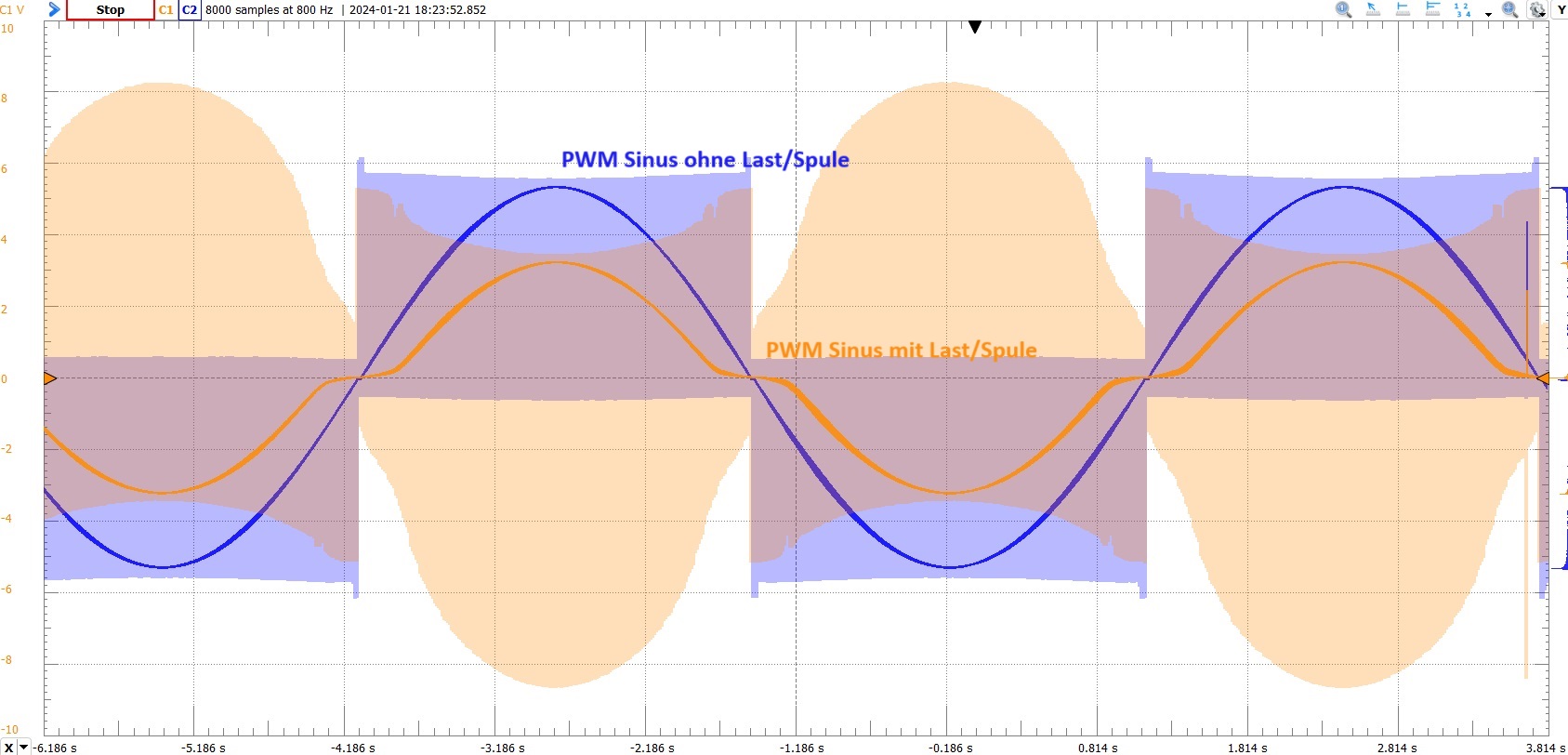
Hallo, ich betreibe Motorspulen mit einem PWM-generierten Sinussignal. Dabei entsteht das Problem, dass die Spulen das Signal dämpfen und verzerren (siehe Bild), wodurch der Motor nicht mehr so flüssig läuft. Kann mir jemand sagen wodurch dies genau passiert und wie ich es minimieren kann? Ich verwende einen Arduino Due mit 10 kHz PWM-Frequenz und generiere einen Sinus mit f<1Hz. Die PWM-Ausgänge steuern normale Vollbrückenschaltungen. Die Spule hat 4 Ohm und 4.1 mH. Besten Dank schonmal!
Angehängte Dateien:
-

Sinusfehler_-_Kopie.jpg
240 KB
Tim schrieb: > Kann mir jemand sagen wodurch dies genau passiert Gib doch mal mehr Daten zu deiner Schaltung und dem Motor unf dazu, was der Screenshot zeigt.
Lothar M. schrieb: > Tim schrieb: >> Kann mir jemand sagen wodurch dies genau passiert > Gib doch mal mehr Daten zu deiner Schaltung und dem Motor unf dazu, was > der Screenshot zeigt. Das hab ich eigentlich alles schon genannt aber gut dann nochmal: Die PWM Ausgänge schalten einfach nur eine H-Brücke, an dieser ist dann eine Spule angeschlossen. Der Motor ist selbstgebaut und einzig wichtige Info ist der Widerstand einer Spule von 4 Ohm und die Induktivität von 4.1 mH. Der Screenshot zeigt eine Oszilloskop-Aufnahme von einmal einem unbelasteten Signal (blau) und dann das Signal wenn eine Spule angeschlossen ist (orange).
Tim schrieb: > Der Motor ist selbstgebaut und einzig wichtige > Info ist der Widerstand einer Spule von 4 Ohm und die Induktivität von > 4.1 mH. Es handelt sich um eine Luftspule?
Tim schrieb: > und einzig wichtige Info ist der Widerstand einer Spule > von 4 Ohm und die Induktivität von 4.1 mH Nein! .... und die Spule wird von den 3.3V des Arduino Due versorgt. Aber das ist ja nicht so wichtig ....
>Die PWM Ausgänge schalten einfach nur eine H-Brücke, an dieser ist dann >eine Spule angeschlossen. Welche H-Brücke verwendest du (Chip ID)?
Moin, wenn Dein PWM-Signal durch einen Tiefpass zum Sinus machst, und Du es auf die H-Brüche schaltest, schaut es so aus, als ob die Brücke eine kleine Spannung braucht, um zu schalten. Das könntest mit einem Poti testen. Vielleicht kannst Du die Transistoren „vorspannen“. Viel Glück Carsten
Carsten-Peter C. schrieb: > Moin, > wenn Dein PWM-Signal durch einen Tiefpass zum Sinus machst, und Du es > auf die H-Brüche schaltest, schaut es so aus, als ob die Brücke eine > kleine Spannung braucht, um zu schalten. > Das könntest mit einem Poti testen. Vielleicht kannst Du die > Transistoren „vorspannen“. > Viel Glück > Carsten Super! Genau sowas hab ich gesucht. Ich werde es ausprobieren. Danke dir :)
H. H. schrieb: > Tim schrieb: >> Der Motor ist selbstgebaut und einzig wichtige >> Info ist der Widerstand einer Spule von 4 Ohm und die Induktivität von >> 4.1 mH. > > Es handelt sich um eine Luftspule? Ja genau
Ist das ne Mosfet oder ne olle BJT Brücke wie der L295, der selbst einfach 0.7 bis 2 V drop hat, je nach Strom? Ohne Last tolles Signal, mit Last halt das was du jetzt siehts. Da hilft A wesentlich mehr Spannung als 3 V Oder B ne Mosfet Brücke mit niedrigen RDSon.
Moin, vielleicht kannst Du die „Vorspannung“ einstellen, indem Du die PWM nicht bei 0, sondern etwas höher beginnen und enden lässt. Gruß Carsten
Tim schrieb: > Dabei entsteht das Problem, dass die Spulen das Signal dämpfen und verzerren > (siehe Bild) Was ist dort dargestellt? Spannung/Strom? Wo gemessen? Wie sieht deine H-Brücke aus (BJT, FET, Totzeitsteuerung, Treiber? Was für ein Motortyp? Fragen über Fragen. Edit: Sorry, übersehen - aber wieso eigentlich mehrere? Tim schrieb: > ... normale Vollbrückenschaltungen ...
Wastl schrieb: > Tim schrieb: >> und einzig wichtige Info ist der Widerstand einer Spule >> von 4 Ohm und die Induktivität von 4.1 mH > > Nein! > > .... und die Spule wird von den 3.3V des Arduino Due versorgt. > Aber das ist ja nicht so wichtig .... Nein, mit bis zu 10V aber der Effekt tritt bei allen Spannungen auf.
Wenn du sinusförmige Magnetkraft willst, dann musst du den Spulenstrom Sinusförmig regeln. Gescheiter rundlauf mit Sinusspannung ist nur mit ordentlich ausgelegtem blechpaket und kleinem luftspalt möglich. Gehe ich bei den stichworten 'Luftspule' und 'Motor' nicht davon aus.
Tim schrieb: > dass die Spulen das Signal dämpfen Oberflächlich gesehen, scheint das so. Tatsächlich hast du eine Übernahmeverzerrung in einem Gegentakt System vorliegen. Der Innenwiderstand der Quelle, die den Spulenstrom liefern muss, ist in der Nähe des Nulldurchgangs zu hoch. Ohne Darstellung der Schaltung mit allen Details lässt sich nicht viel mehr sagen über die Fehlerursache und über die Behebung. Ein Vorspannen der Ansteuerung kann helfen, ist aber nicht unproblematisch, da ein Durchschiessen der Brücken in allen Betriebszuständen (Temperaturgang beachten, verriegeln) verhindert werden muss. Besser ist es, eine Gegenkopplung an zu wenden, die den Spannungsabfall in der Nähe des Nulldurchgangs ausgleicht. Was da jetzt konkret am Besten zu tun ist, hängt von der Schaltung und von einer genauen Wiedergabe mehrerer Signale ab: Ansteuerungen und Strom durch UND Spannung an der Spule.
John B. schrieb: > Was da jetzt konkret am Besten zu tun ist, hängt von der Schaltung und > von einer genauen Wiedergabe mehrerer Signale ab: Ansteuerungen und > Strom durch UND Spannung an der Spule. Die Spannung an der Spule sagt über das Drehmoment des Motors wenig, solange die in der Spule durch die Rotation des Motors induzierte Spannung unbekannt ist. Drehmoment entsteht durch Strom und Orientierung des daraus resultierenden Kraftvektors.
Rainer W. schrieb: > Die Spannung an der Spule sagt über das Drehmoment des Motors wenig, > solange die in der Spule durch die Rotation des Motors induzierte > Spannung unbekannt ist. Drehmoment entsteht durch Strom und Orientierung > des daraus resultierenden Kraftvektors. Ja, schön und gut, das sollte als bekannt voraus zu setzen sein. Warum schreibst du Selbstverständliches unter ein Zitat mit meinem Text? Du benennst keinen Zusammenhang. Wenn es dem TE wirkllch um die Behebung der Unzulänglichkeiten seiner Schaltung geht, dann sollte er endlich mit einer vollständigen Schaltung und der nachvollziehbaren Wiedergabe aller Steuersignale, der Spannung an der Spule und des Stroms durch die Spule herausrücken. Rasche Fehlersuche gelingt vor Allem mit einer umfassenden Sicht der vorliegenden Gegebenheiten.
Angehängte Dateien:
-

Schaltung1.png
27 KB
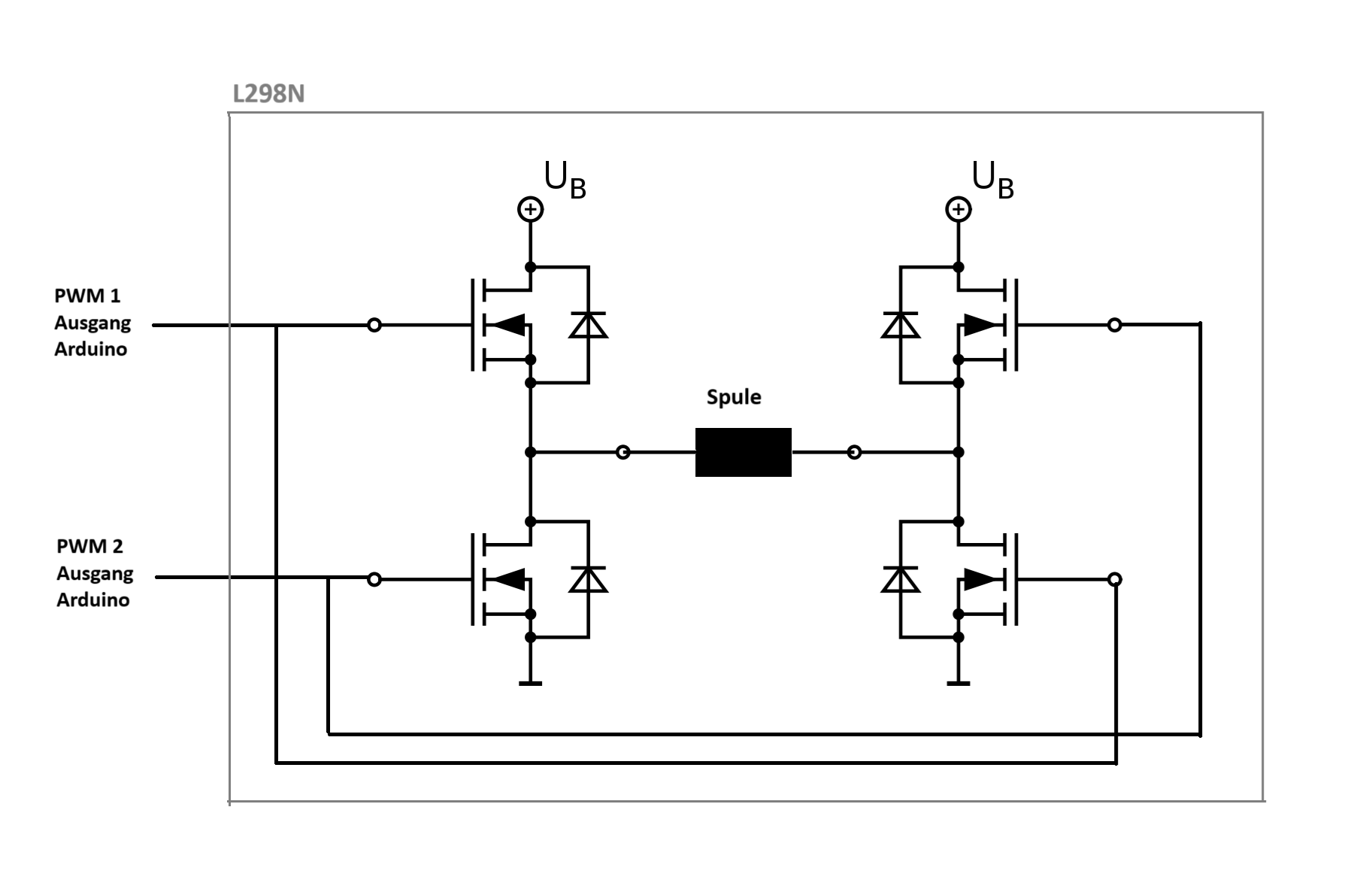
Alles klar, danke schonmal für den Input. Ich hab jetzt mal eine kleine Schaltung erstellt. Für die Vollbrücken benutze ich einen L298N Motortreiber. Dort hab ich eine Luftspule angeschlossen (Innendurchmesser=8mm, Außendurchmesser=19mm, Länger=12mm, Drahtdurchmesser 0.35mm, Windungen 500, R=4 Ohm, L=4.1mH). Wir betrachten erstmal nur die einfache Spule ohne irgendwelche Magnetfelder im Rotor die dort eine Spannung induzieren würden. Mir ist klar, dass das Signal durch die Rons in der Brückenschaltung reduziert wird, aber nicht warum die Sinusform auch so verzerrt wird. Für die Spannungsversorgung Ub nutze ich einen Spannungsgenerator (10V). PWM-Ausgang 1 schaltet jetzt mit Hilfe eines Look Up Tables die positive halbwelle eines Sinussignals. Mit einer PWM Frequenz von 10 kHz, welches center aglined ist. Bei der negativen Halbwelle des zu erzeugenden Sinus, übernimmt dann der PWM-Ausgang 2. Fehlen noch irgendwelche Infos?
Mal unabhängig von deiner Anwendung: Um einen perfekten Sinus darstellen zu können brauchst du auch eine PWM, die von 0% bis 100% alles darstellen kann. In der Vollbrücke wirst du aber sicher eine Totzeit eingestellt haben, damit es keine Brückenkurzschlüsse gibt. Außerdem haben die Transistoren eine endliche Schaltzeit. Das ergibt die Abweichung, die du in den Messungen siehst. Im Bereich der Verzerrungen ist dein PWM Signal (die Spannung) so klein, dass vermutlich der andere Transistor gar nicht richtig schaltet. Erst wenn du sauber eine PWM stellen kannst an beiden Transistoren, folgt die Ausgangsspannung deinem PWM-Sollwert. Mach dir mal ne Excel-Tapete wo du die Spannung ins Verhältnis von PWM und Totzeit setzt. Dann wird genau das Signal rauskommen, das du auch mit dem Oszi gemessen hast. Grüße, Jens
Angehängte Dateien:
-

Halbbruecke2.jpg
61 KB
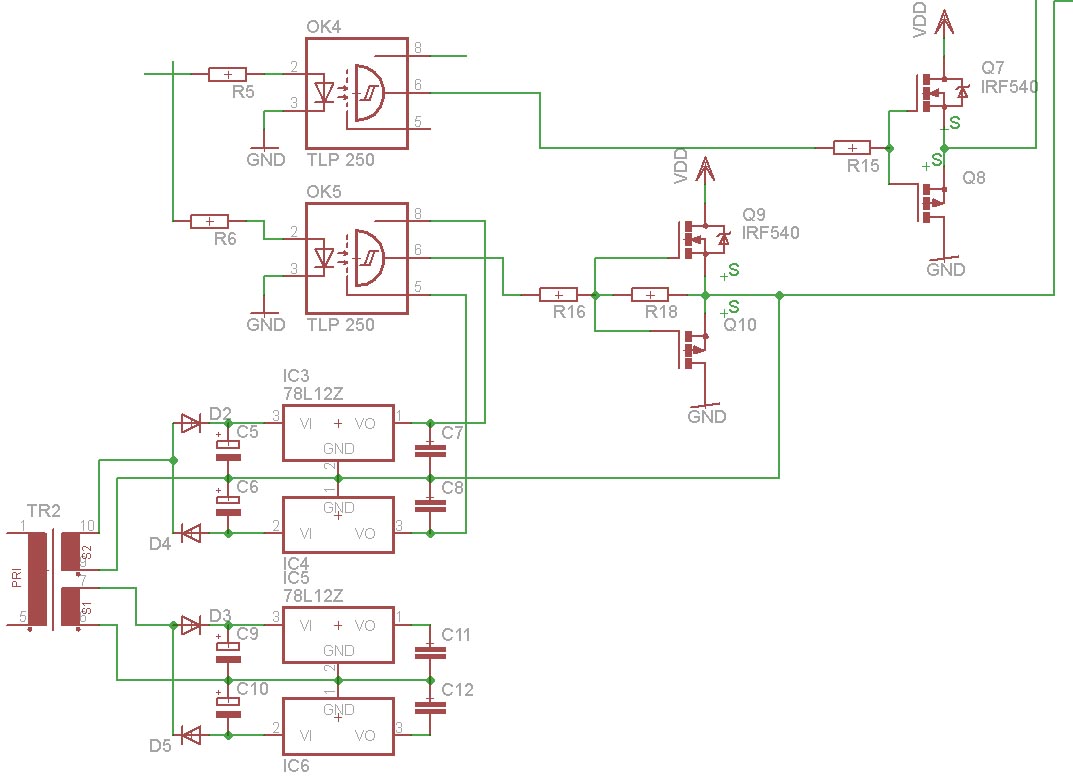
Moin, ich bringe das PWM-Signal direkt auf die Motortreiber. Das ist einfach aber funktioniert bei mir ganz gut, auch wenn ein Sinus zur Ansteuerung sicherlich besser ist. Dafür sind Spannungen von 70V kein Problem. Vielleicht ist es eine Anregung für Dich. Gruß Carsten
Tim schrieb: > Fehlen noch irgendwelche Infos? Ja. Dir wurde auch mitgeteilt, welche. John B. schrieb: > Was da jetzt konkret am Besten zu tun ist, hängt von ... > von einer genauen Wiedergabe mehrerer Signale ab: Ansteuerungen und > Strom durch UND Spannung an der Spule. John B. schrieb: > Wenn es dem TE wirkllch um die Behebung der Unzulänglichkeiten seiner > Schaltung geht, dann sollte er endlich mit einer vollständigen Schaltung > und der nachvollziehbaren Wiedergabe aller Steuersignale, der Spannung > an der Spule und des Stroms durch die Spule herausrücken. Nachdem die Rückfragen ignoriert werden, wird das zu mühsam und auch uninteressant.
Angehängte Dateien:
-

PWM_1_255_Last_Vergleich.png
140 KB
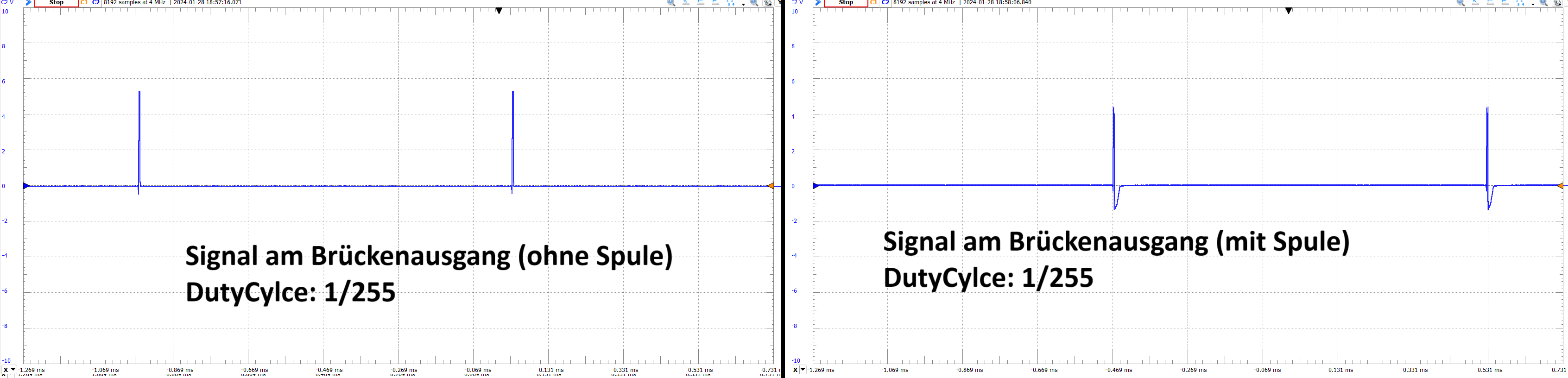
Jens W. schrieb: > In der Vollbrücke wirst du aber sicher eine Totzeit eingestellt haben, > damit es keine Brückenkurzschlüsse gibt. Außerdem haben die Transistoren > eine endliche Schaltzeit. Das ergibt die Abweichung, die du in den > Messungen siehst. Hey Jens danke dir, eine Totzeit um einen Brückenkurzschluss zu vermeiden habe ich nicht eingestellt, ich schalte einfach erst den einen PWM Ausgang aus bevor ich den anderen einschalte. Jens W. schrieb: > Im Bereich der Verzerrungen ist dein PWM Signal (die Spannung) so klein, > dass vermutlich der andere Transistor gar nicht richtig schaltet. > Erst wenn du sauber eine PWM stellen kannst an beiden Transistoren, > folgt die Ausgangsspannung deinem PWM-Sollwert. Du meinst also dass PWM-Perioden mit einen geringen Duty Cycle nicht genauso hinter der Brücke ankommen? Das hab ich überprüft und denke das sieht gut aus (siehe Anhang). Jens W. schrieb: > Mach dir mal ne Excel-Tapete wo du die Spannung ins Verhältnis von PWM > und Totzeit setzt. Dann wird genau das Signal rauskommen, das du auch > mit dem Oszi gemessen hast. Meinst du einen konstanten Duty Cycle einstellen und dann die mittlere Spannung messen und das für verschiedene Duty Cycles?
Carsten-Peter C. schrieb: > vielleicht kannst Du die „Vorspannung“ einstellen, indem Du die PWM > nicht bei 0, sondern etwas höher beginnen und enden lässt. Danke Carsten für deine ganzen Vorschläge :) Die Tiefpassfilterung hat nichts gebracht aber das Hochsetzen des Signals führt zu einem "schöneren" Sinus und besserer Performance des Motors. Dazu habe ich einfach den jeweiligen Sinuswert um den Faktor k hoch bzw. runter gesetzt.
1 | |
2 | double k = 0.2; |
3 | double PWMvalue = (sinusValue*(1-k)+k) * resolutionPWM; |
Jetzt würde ich aber gerne noch die Ursache des Problems verstehen. Kann das an der billigen Brückenschaltung liegen? Was sollte die Brückenschaltung für Eigenschaften haben um gut zu performen?
Stell mal die PWM-Frequenz von 10kHz auf 2kHz und schau, wie dein Sinus dann aussieht.
Christoph M. schrieb: > Stell mal die PWM-Frequenz von 10kHz auf 2kHz und schau, wie dein Sinus > dann aussieht. Hab ich schon ausprobiert. Macht keinen merkbaren Unterschied auf das Signal.
Tim schrieb: > ber das Hochsetzen des > Signals führt zu einem "schöneren" Sinus und besserer Performance des > Motors. Leider Fehlen noch immer Angaben zu Schaltung und Motor. Ich rate mal: Dein ausgewählter H-Brücken- Baustein schafft deine 10kHz mit 0,4% Duty cycle nicht. Es ist ein Synchron- oder Reluktanzmotor mit Luftspulen oder riesigem Luftspalt. Du steuerst das Drehfeld stur nach einer Sollfrequenz. Der Magnetische Kraftvektor ist durch den offenen Magnetischen Kreis unkontinuierlich und das Drehmoment auf dem Rotor pulsiert. Der Rotor schwingt durch seine Trägheit und eilt zeitweise dem Drehfeld voraus. Erhöhung der Feldstärke hilft, diese Probleme zu vertuschen. Ich empfehle, zuerst die Probleme abseits der Leistungselektronik zu beheben.
Jo Flip, das ist eig alles irrelevant. Es ist ein Synchronmotor aber ich betreibe wie gesagt erstmal nur eine einfache Luftspule mit dem PWM-Sinus. Weiterhin kommen die 0.4% Duty Cycle gut durch die Brücke, wie die Oszilloskop-Aufnahme (etwas weiter oben) zeigt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.