Guten Tag, Ich bin Student an einer Hochschule und befasse mich zurzeit mit meiner Bachelorarbeit. Dabei geht es um den „Austausch mechanischer Komponenten durch elektrische Komponenten in einem Geschwindigkeitsmesssystem für Kraftfahrzeuge" Ein Wirbelstromtachometer, welcher zuvor mit einer Tachowelle betrieben wurde, soll nun durch Verwendung von einem Hallsensor, zur Geschwindigkeitsaufnahme an der Kardanwelle, einem Steuergerät ( Arduino uno),zur Datenverarbeitung und einem Motor, für den Antrieb, betrieben werden. Ich bin mir etwas unsicher bei der richtigen Auswahl des Motors. 1.Der Motor muss die Drehzahl von 250 1/min -8000 1/min anfahren können 2. langlebig sein (geringe Wärmeentwicklung) 3. Die Maximal zur Verfügung stehende Spannung ist 12V (Bordnetzspannung des Pkw) 4. Das benötigte Drehmoment, welches der Motor besitzen muss, ist sehr gering, konnte jedoch nicht festgestellt werden. 5. Der Motor sollte CCW fähig sein Ich habe dazu diese Bauteile gefunden die passen könnten: Motor - 283856 - EC-max 22 Ø22 mm, bürstenlos, 25 Watt, mit Hall-Sensoren https://www.maxongroup.de/medias/sys_master/root/8839853244446/DE-239.pdf Sensor - 499357 - Encoder ENC 16 EASY, 256 Imp. https://www.maxongroup.de/medias/sys_master/root/8839989559326/DE-449-450.pdf ESCON Module 24/2 (466023) https://www.maxongroup.ch/maxon/view/product/control/4-Q-Servokontroller/466023 Ich führe das Projekt privat durch und die Bauteile die ich gefunden hab sind zu teuer, dass ich sie bezahlen könnte. Habt ihr evtl. Ideen für vergleichbare Produkte die ich benutzen kann? Mit freundlichen Grüßen Felix
Ui...
Mal abgesehen davon, dass die Abnahme der Drehinformation von der
Tachowelle mit einem Hall-Element auch einen Magneten an der Welle
erfordert, das Ganze (langlebig) in einem schützenden, dichten Gehäuse
laufen muss und dass ich das als den wirklich schwierigen Teil
betrachte...
Ich würde vielleicht einen Weg gehen, bei dem (im ersten Schritt) kein
µC erforderlich ist, und bei dem die Drehung der der Kardanwelle mit
wenig Elektronik 1 : 1 auf die Motorwelle übertragen wird. Problem bei 1
: 1: Es muss vielleicht eine Untersetzung (Motor langsamer als Welle)
stattfinden.
Weg: An bzw. bei der Kardanwelle werden, außer einem ringförmigen
Magneten, 3 Hall-Elemente (120°) angebracht. Das Drehfeld wird zu einem
Schrittmotor übertragen. Der von dir gewählte EC sollte mit der
Poolpaarzahl 1 dafür geeignet sein. Ich habe sehr ähnliche, aber größere
Motoren auch. Bis dahin werden die Hall-Elemente im Motor nicht
gebraucht, auch kein Controller oder gar µC. Nur ein bisschen
Treiberelektronik wird gebraucht, damit der Motor bei verschiedenen
Drehzahlen die optimale Spannung bekommt, so dass die Leistungsaufnahme
minimiert wird.
Eine Untersetzung wäre mit ein paar Digital-ICs zwar machbar, aber heute
macht man das dann vielleicht doch mit einem µC, der dann auch die
Leistungsregelung und mehr erledigen kann. (Ohne Cloud, Bluetooth und
WLAN geht heute ja nichts mehr.)
Einen ganz anderen Ansatz als den mit z. B. den von dir gewähltem Motor
sehe ich auch nicht. Ich weiß jetzt nicht, ob der EC-22-Motor ein
eisenloser "Glockenanker"-Motor ist. Das wäre vielleicht hilfreich.
Nebenbei: Um die Drehrichtung zu erkennen ("5. Der Motor sollte CCW
fähig sein") sind mindestens 2 Hall-Elemente (90°) erforderlich. Auch
daraus kann ein 3-phasiges Drehfeld generiert werden.
Und das Ganze privat?
Uwe B. schrieb: Erstmal, vielen Dank für deine Nachricht ! > Mal abgesehen davon, dass die Abnahme der Drehinformation von der > Tachowelle mit einem Hall-Element auch einen Magneten an der Welle > erfordert, das Ganze (langlebig) in einem schützenden, dichten Gehäuse > laufen muss und dass ich das als den wirklich schwierigen Teil > betrachte... Die Tachowelle soll wahrscheinlich nicht verwendet werden, Motor wird direkt am Tacho angeschlossen(im Kfz). > > Ich würde vielleicht einen Weg gehen, bei dem (im ersten Schritt) kein > µC erforderlich ist, und bei dem die Drehung der der Kardanwelle mit > wenig Elektronik 1 : 1 auf die Motorwelle übertragen wird. Problem bei 1 > : 1: Es muss vielleicht eine Untersetzung (Motor langsamer als Welle) > stattfinden. Leider ist die Übersetzung nicht 1:1, aber ja, der Tacho und der Antrieb sind beide linear und stehen in einem festen Verhältnis zueinander. Der Motor muss somit "einfach" linear die Geschwindigkeit übertragen. Leider ist es schwierig einen BLDC Motor mit diesen niedrigen Geschwindigkeiten zu betreiben. > Weg: An bzw. bei der Kardanwelle werden, außer einem ringförmigen > Magneten, 3 Hall-Elemente (120°) angebracht. Das Drehfeld wird zu einem > Schrittmotor übertragen. Der von dir gewählte EC sollte mit der > Poolpaarzahl 1 dafür geeignet sein. Ich habe sehr ähnliche, aber größere > Motoren auch. Bis dahin werden die Hall-Elemente im Motor nicht > gebraucht, auch kein Controller oder gar µC. Nur ein bisschen > Treiberelektronik wird gebraucht, damit der Motor bei verschiedenen > Drehzahlen die optimale Spannung bekommt, so dass die Leistungsaufnahme > minimiert wird. Meiner Kenntnis nach sind Schrittmotoren nicht für so hohe Drehzahlen ausgelegt?! Ich habe bereits einen Hallsensor an der Kardanwelle angebracht, dieser nimmt bereits die Drehzahl der Kardanwelle(mithilfe von 8 Magneten) auf und gibt diese an ein Arduino und von da aus auf den Pc-monitor aus. > Einen ganz anderen Ansatz als den mit z. B. den von dir gewähltem Motor > sehe ich auch nicht. Ich weiß jetzt nicht, ob der EC-22-Motor ein > eisenloser "Glockenanker"-Motor ist. Das wäre vielleicht hilfreich. Ja, bei dem Motor handelt sich um einen Glockenanker- Motor > Nebenbei: Um die Drehrichtung zu erkennen ("5. Der Motor sollte CCW > fähig sein") sind mindestens 2 Hall-Elemente (90°) erforderlich. Auch > daraus kann ein 3-phasiges Drehfeld generiert werden. Der Motor muss sich ausschließlich gegen der Uhrzeigersinn drehen lassen > Und das Ganze privat? haha.. ich fange auch langsam an es zu bereuen :')
Felix W. schrieb: > ESCON Module 24/2 (466023) > > https://www.maxongroup.ch/maxon/view/product/control/4-Q-Servokontroller/466023 Das haut nicht hin, wenn du einen 3-Phasen Motor antreiben willst, dieser Controller ist für Bürstenmotoren. Du kommst wesentlich günstiger mit einem Modelbau ESC hin oder mit einem reinen Selbstbau. Als Anhaltspunkt kann dir für Motoren mit Hallsensoren die alte AVR447 Applikation dienen, die bei Microchip heute doc8010 heisst: https://ww1.microchip.com/downloads/en/Appnotes/doc8010.pdf Ich vermute sogar, das du nicht mal die Sensoren brauchst. Übrigens kann man mit dem CD4018 CMOS Baustein einen sehr kompakten Generator für 3 Phasen bauen, nur noch die Endstufen hinzufügen. Das CMOS Kochbuch von Don Lancaster hat da einen Vorschlag - sollte in der Uni Bibliothek verfügbar sein. Ausserdem sind in moderneren Autos bereits die Sensoren für Geschwindigkeit vorhanden, sie sind am ABS angeschlossen und liefern die Drehgeschwindikeit jedes Rades. Rückwärts drehen brauchst du nicht? D.h. das Hodometer ist nicht nötig?
Felix W. schrieb: > Die Tachowelle soll wahrscheinlich nicht verwendet werden, Motor wird > direkt am Tacho angeschlossen(im Kfz). Das hatte ich so verstanden. Frage: Ist bzw. war die Tachowelle an der Kardanwelle angeschlossen, oder an einem Rad (wie ich es mal vor langer, langer Zeit gesehen habe)? Felix W. schrieb: > Leider > ist es schwierig einen BLDC Motor mit diesen niedrigen Geschwindigkeiten > zu betreiben. Prinzipiell unterscheiden sich Schrittmotoren nicht von BLDCs. Wobei, Vorsicht, was ist ein BLDC? Das ist ein "Bürstenloser Gleichstrom-Motor". Der EC max ist kein BLDC, er kann nicht (bzw. nur mit einem externen Controller) mit DC betrieben werden. Ohne Controller ist er eher ein Schrittmotor. Der Controller sagt nur nach jedem ausgeführten Schritt, dass er jetzt den nächsten Schritt machen soll. So ungefähr, jedenfalls. Also haben wir ein Problem mit dem Begriff BLDC. Den reinen Motor kann man mit einem 3-Phasen Sinus-Drehfeld beliebig langsam laufen lassen, wie ein Schrittmotor, nur, bei Glockenankern, ohne die Sprünge und ohne magnetische Halte- bzw. Hafteffekte. Und dann auch richtig schnell. Das habe ich gemacht, sogar mit Versuchsaufbauten mit extra dafür entworfenen Leiterplatten. Und bei dir sollte dieser Weg, also "BLDC-"Motor ohne den BLDC-Controller, auch zum Erfolg führen können. Die Herausforderung ist die, dass die Betriebsspannungen (= 3 120° versetzte Sinussignale) in ihrer Spannung der Drehzahl und dem erforderlichen Drehmoment angepasst werden müssen, sonst wird unnötig Energie verbraten - oder der Motor dreht nicht richtig. Bei Schrittmotoren ist das nicht anders. Da du fast kein Drehmoment brauchst, bleibt das ein relativ einfacher Zusammenhang: Die Spannung an den Strängen ist die Ableitung des Sinus-Drehfeldes + ein bisschen Reserve. Und aus deinem 8-Magneten Hall-Signal sollte sich relativ leicht ein passendes 3 x 120° Sinussignal erzeugen lassen. Rechteck würde in deinem Fall wahrscheinlich sogar auch gehen. (Ich glaube, es gibt die Begriffe "Synchro" und "Resolver", die auch etwas mit dieser Thematik zu tun haben, aber ohne Elektronik die Drehung einer Quelle an ein Ziel elektrisch übertragen kann. Aber der Ansatz wäre nach meiner schwachen Erinnerung hier nicht geeignet.)
>Ausserdem sind in moderneren Autos bereits die Sensoren für >Geschwindigkeit vorhanden, sie sind am ABS angeschlossen und liefern die >Drehgeschwindikeit jedes Rades. Rückwärts drehen brauchst du nicht? D.h. >das Hodometer ist nicht nötig? Nein, das Hodometer ist nicht nötig. Das Auto ist so alt, da gab es noch kein ABS :) Jaguar E-Type Serie 3 V12 Danke für deine Infos @matzetronics ! ich werde mich da mal einlesen. >Ist bzw. war die Tachowelle an der Kardanwelle angeschlossen, oder an einem Rad Weder noch! Drehzahlabnahme war ursprünglich am 4 Gang Getriebe Jetzt wurde jedoch ein neueres 5 Gang Getriebe vom Jaguar XJS verbaut und das hat leider keinen Anschluss mehr (und (wie zuvor auch)keine Sensorik für die Drehzahlabnahme) >Den reinen Motor kann >man mit einem 3-Phasen Sinus-Drehfeld beliebig langsam laufen lassen, >wie ein Schrittmotor, nur, bei Glockenankern, ohne die Sprünge und ohne >magnetische Halte- bzw. Hafteffekte. Und dann auch richtig schnell. Das >habe ich gemacht, sogar mit Versuchsaufbauten mit extra dafür >entworfenen Leiterplatten. Das hört sich Interessant an! Kann ich mir dazu irgendwo etwas angucken ? Auch danke an dich @uwe_beis
Angehängte Dateien:
-

BLDC-Manuell.jpg
610 KB
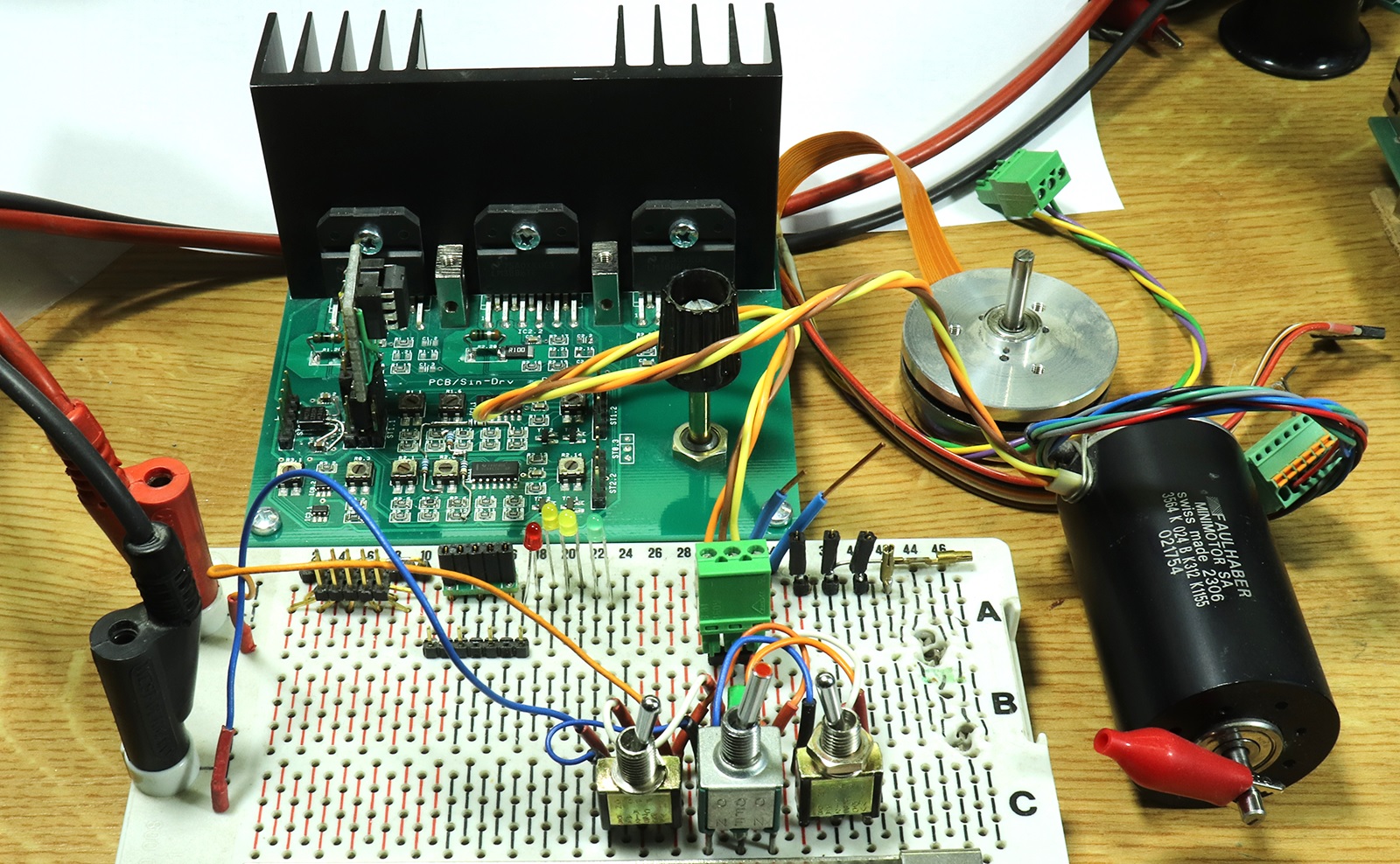
Felix W. schrieb: > Das hört sich Interessant an! Kann ich mir dazu irgendwo etwas angucken > ? Nein, da habe ich leider nichts. Ich habe noch mal die alte Kiste mit dem Zeug, womit ich mich damals beschäftigt hatte, heraus gekramt, und mir auch die Schaltung angesehen: Ich kann nicht nachvollziehen, wie das gemeint war(!). Die 3 Leistungsstufen haben Konstantstrom-Ausgänge. Der Sinn bzw. das Ziel war damals, einen BLDC so sanft wie (im Rahmen meines Aufwandes) möglich, laufen zu lassen. Dabei ging es aber nicht um einen eisenlosen Motor. Ich könnte dir die Schaltung schicken, aber das würde dir gar nix helfen. Andererseits ist das, was ich beschreibe, doch so offensichtlich: Der Rotor des "elektromechanischen Teils" eines BLDCs, also auch der eines Schritt- oder eines Synchronmotors, richtet sich nach der Richtung des Feldes, das im Stator erzeugt wird, aus. Dreht man das Feld, dreht sich der Anker. Schrittmotoren und auch viele BLDCs haben viele Pole, also braucht man bei denen viele Zyklen für die Feldgenerierung, um eine volle mechanische Drehung zu verursachen. Bei den 3-poligen Motoren, ist das Verhältnis 1:1. Ich habe jetzt noch einen kleinen Versuchsaufbau gemacht: Ich steuere meinen 3-ploigen Glockenanker BL"DC" über 3 Kippschalter mit Mittel-Nullstellung, die wie 3 Halb-H-Brücken geschaltet sind, an, und kann damit fein abgestuft viele Positionen einer vollständigen Umdrehung direkt erreichen. Richtig (und schnell) betätigt, würde der Motor natürlich auch drehen. Davon könnte ich ein Video machen - aber ist das nötig? Wenigstens ein Foto: Die 3 Schalter und der Motor (Faulhaber). Mit der Kroko-Klemme zeige ich die Drehung an. Im Hintergrund: Die erwähnte Platine und ein anderer BL"DC" (Maxon). Andere Frage: Hast du die Magnete und den Hall-Sensor tatsächlich gut geschützt anbringen können? Vielleicht im Getriebe-Gehäuse?
Danke Uwe! Ich werde mich die nächsten Tag dransetzen und mich dann mit meinen Ergebnissen zurückmelden. >Andere Frage: Hast du die Magnete und den Hall-Sensor tatsächlich gut >geschützt anbringen können? Vielleicht im Getriebe-Gehäuse? Der Sensor befindet Sich an der Karosserie, diese ist direkt mit dem Diff. Verbunden. An dem Flansch vom Diff befindet sich die CNC gefräste Platte mit den Magneten.
Evtl. ist auch mein FU Projekt für dich interessant, weil man da die Drehfrequenz direkt vorgeben kann oder per Analogeingang steuert: https://www.mikrocontroller.net/articles/3-Phasen_Frequenzumrichter_mit_AVR Das ist alles recht ausführlich kommentiert und man kann damit Motoren aller Grössen steuern, es ist nur eine Frage der Endstufen. Da ist auch ein PID Regler bei. Vllt. hilfts ja. Felix W. schrieb: > Jaguar E-Type Serie 3 > V12 Ein schönes Auto! Ein Freund von mir fährt den XK8, der fast so schön ist wie der Typ E.
Ich muss noch ein paar Nachträge machen: Außer meinem Ansatz, - bei dem die Drehung bzw. die Position der Antriebswelle 1:1 übertragen würde, gäbe es natürlich auch noch den Ansatz, - bei dem die Drehzahl der Antriebswelle gemessen wird, zum Motor am Tacho übertragen wird (analog oder digital), so dass der mehr oder weniger genau mit der gleichen (bzw. in festem, proportionalen Verhältnis) Drehzahl läuft. Ein kleiner Fehler wäre unvermeidbar, aber tolerierbar. Dafür könnte die Technik vom Matthias Teil der Lösung sein. Beides hat Vor- und Nachteile. Auf einen möglichen Nachteil bei meinem Verfahren möchte ich noch hinweisen: Der Rotor des Motors wird ja durch das extern vorgegebene Drehfeld in eine bestimmte Position "gezogen". Dabei wird er nicht starr, wie von Zahnrädern, bewegt, sondern flexibel, wie mit Federn gekoppelt. Das ergibt zusammen mit der Masse (genauer: dem Trägheitsmoment) des Motors einen Schwingkreis mit einer Resonanzfrequenz, die, nebenbei, durch die Stärke des Stroms beeinflusst wird. Wird der Motor nun mit dieser Resonanzfrequenz angeregt, kann es zu Resonanzen kommen. (Ach!!!) Kann es - muss es aber nicht. Das hängt von verschiedenen Faktoren ab. Ich kann mir da einige vorstellen, die die Situation ent- oder verschärfen. Dieses Phänomen ist ein großes Problem bei Schrittmotoren. Ich bin kein Motor- oder Antriebsspezialist, aber erfahren habe ich das in der Praxis vor langer Zeit selber. Und ich weiß nicht, mit welchen Tricks das bei Schrittmotor-Antrieben beherrscht wird. Aber ich hörte davon, dass zumindest auch mechanische Dämpfungsmaßnahmen ergriffen werden - wie auch immer die aussehen. Wenn ich mich nicht irre, lassen sich mit ein und derselben Hardware mit µC beide Verfahren realisieren. So, nun sollst du die Bachelor-Arbeit machen, aber ich habe den Eindruck, dass es nicht allein deine Arbeit wird... Es wird ja von dir verlangt, dass du dich selbstständig in die Thematik einarbeitest. Na ja, und wenn du nicht nur liest, sondern auch fragst - ist das nicht auch selbstständig einarbeiten?
Uwe B. schrieb: > Dieses Phänomen ist ein großes Problem bei Schrittmotoren. Ja, bei Schrittmotoren. Aber wenn du einen BLDC mit feldorientierter Regelung (Sinusmodulation oder Popokurve) ansteuerst, schwingt da nichts. Der Motor springt ja dann nicht von Sektor zu Sektor, sondern wird proportional zur Stellung Megnet-Anker bestromt und passend zur Rotation bewegt. Deswegen empfehle ich ja die Lektüre von AVR447. Genauso einen Motor wie Uwe habe ich damals in meinen Vorversuchen zur E-Mobilität benutzt. Gut, es war einer von Pioneer Precision Mechanics, er war zum Direktantrieb eines Plattentellers gedacht. Mit Sinusansteuerung aus AVR447 (und später eigenen Modifkationen) lief der absolut ruckfrei und lautlos. Da der Motor nicht schwingt, gibts auch keine Resonanz.
Matthias S. schrieb: > Da der Motor nicht schwingt, gibts auch keine Resonanz. Es ist ermutigend, dass du so gute Erfahrungen mit der Sinusansteuerung gemacht hast. Ideal und perfekt wird es nicht sein können, und wie weit die nicht-idealen Eigenschaften des Systems sich negativ auswirken, kann ich nicht abschätzen. Nicht-ideal vermute bzw. befürchte ich das Verhältnis des Winkels, die der Motor einnimmt, zum Verhältnis der Phasen, die von außen vorgegeben werden sein. Verursacht durch nicht-ideale Ausbreitung der Felder im Motor würde er sich dann nicht gleichmäßig bei konstanter Frequenz drehen bzw. kein konstantes Drehmoment erzeugen. Wie gesagt, das sind alles nur Gedanken, kein Wissen, keine Erfahrungen. Mit meinen BL-Glockenankermotoren könnte ich das ausprobieren, einiges für so einen Versuch hätte ich hier schon, aber in diesem Rahmen wäre es mir doch zu viel Aufwand. Ein anderer Aspekt wäre, dass bei den verschiedenen Drehzahlen die Steuerspannung angepasst sein muss, damit der Strom und damit das Drehmoment konstant bleibt und die Leistung minimiert wird. Erst dachte ich, dass wegen der höheren Spannung auch die Resonanzfrequenz steigen würde, aber die ist ja vom Dreh- (bzw. Halte-)moment und damit vom Strom abhängig, bliebe also weitgehend konstant (oder könnte sogar beeinflusst werden). Aber, wie gesagt, deine Erfahrungen zerstreuen meine Bedenken weitgehend. Matthias S. schrieb: > Der Motor springt ja dann nicht von Sektor zu Sektor, Der TO schreibt, dass er 8 Magnete angeordnet hat. Wenn das Hall-Element digital arbeitet, wären das Sprünge von 45°, (eventuell in zwei ungefähr gleich große Schritte teilbar). Ohne weitere, nicht ganz triviale Maßnahmen, würde der Motor dann doch springen.
Uwe B. schrieb: > Ohne weitere, nicht ganz triviale > Maßnahmen, würde der Motor dann doch springen. Wie gesagt, wer Interesse an feldorientierter Ansteuerung, aka Sinusmodulation hat, lese die AVR447. Da werden die Hallsensoren zur Resynchronisation benutzt, aber dazwischen erzeugt der MC die passende Kurve durch Interpolation. Wie gesagt, klappt das ohne Knurren und Brummen. Das gleiche Prinzip haben wir dann auch für einen 4kW Radnabenmotor benutzt, der damit praktisch lautlos drehte. Während so ein Motor beim manuellen Drehen durchaus von Sektor zu Sektor springt, passiert das beim Ansteuern mit Sinus nicht.
Uwe B. schrieb: > Ich habe noch mal die alte Kiste mit dem Zeug Oh, da hat jemand das gute alte Hirschmann Steckbrett :) Das einzige, was etwas taugt.
900ss schrieb: > das gute alte Hirschmann Steckbrett Was es alles gibt :-O Hirschmann hat mal Steckbretter hergestellt? Allerdings sehe ich, das da normale ICs und Leisten mit RM 2,54 ihre lieben Problemchen haben.
Angehängte Dateien:
-

IMG_9044.JPG
240 KB
Jungs, wir kommen vom Thema ab. Egal... 900ss schrieb: > Oh, da hat jemand das gute alte Hirschmann Steckbrett :) Das einzige, > was etwas taugt Ganz meiner Meinung. Ich habe nicht nur eine XP101, sondern ca. 6, mit reichlich Adaptern für alle Zwecke. Und mein Leben lang auch komplexe Digital- und Analogschaltungen damit entwickelt. Rekord: 4 XP101 randvoll, wurde später zu einer vollgepackten Europakarte (ist ~ 40 Jahre her). Foto: Eine relativ neue Entwicklung. Keine Probleme mit DIL, auch nicht mit den üblichen Stiftleisten (im Gegensatz zu den aktuellen, billigen Breadboards, die ich auch habe).
Uwe B. schrieb: > mit reichlich Adaptern für alle Zwecke Ohne Adapter ist es auf dem Brett leider schwierig. Aber sonst ist das ein ziemlich gutes Steckbrett, nicht so ein Schraddelkram wie es sonst so gibt. Kontaktprobleme gibt es eigentlich nicht. Und die Dinger sind 40+ Jahre alt.
Könnte man einfach ein feststehendes Drehmagnetfeld in der Wirbelstromglocke erzeugen anstatt etwas mittels Motor anzutreiben ? Würde es mitnehmen ?
Carypt C. schrieb: > Könnte man einfach ein feststehendes Drehmagnetfeld in der > Wirbelstromglocke erzeugen anstatt etwas mittels Motor anzutreiben ? > Würde es mitnehmen ? Genau wie die Außenläufer z.B. in Tonbandgeräten. Ja, gute Idee, das könnte klappen. Das entspräche wohl auch der Aufgabenstellung. Aber die Fertigung dieser Technik ist eine ganz andere Welt als Schaltungen, Leiterplatten und Soft- bzw. Firmware.
Carypt C. schrieb: > Könnte man einfach ein feststehendes Drehmagnetfeld in der > Wirbelstromglocke erzeugen anstatt etwas mittels Motor anzutreiben ? > Würde es mitnehmen ? Wenn ich das richtig verstehe, müsstest du dafür den originalen Tacho aber zerstören? Das solltest du nicht tun. Was gehen würde, wäre, am unteren Abtrieb einen kleinen BLDC als Generator zu montieren und die 3 Phasen am Ausgang etwas verstärken und an den oberen Motor hinterm Armaturenbrett anzuschliessen. Sozusagen eine starre by-Wire Verbindung. Uwe B. schrieb: > Und mein Leben lang auch komplexe Digital- und > Analogschaltungen damit entwickelt. Da bin ich ja froh, das du für den AD2496 damals eine Platine entwickelt hast und kein Steckbrett in den Karton gepackt hast :-) Läuft übrigens heute noch, nur die Band gibts nicht mehr. Edit: Ich habe gerade nochmal Schaltpläne für direktangetriebene Plattenspieler durchgeguckt. Aber die hier sind alle von Pioneer und benutzen den PA2005 Controller IC. Ist also kaum zu reproduzieren.
Oh Gott, ich weiß gar nicht ob, es physikalisch funktionieren könnte, deshalb die Frage. Aber ein Ferrariszähler funktioniert ja ähnlich. Erst habe ich ja gedacht es würde versucht werden eine genaue Drehzahl zu Kalibrierung eines Tacho zu erzeugen (ich war schon beim Fahrraddynamo), bis mir dann dämmerte, es geht um eine Fahrzeug-restaurierung, bzw den Erhalt der originalen Tachoanzeige. Ja Luxus, toll. Aber gut, verständlich, schon wegen der Zulassung. Aber es geht mich ja nichts an, und halte mich ja raus.
>Evtl. ist auch mein FU Projekt für dich interessant, weil man da die >Drehfrequenz direkt vorgeben kann oder per Analogeingang steuert Danke, der Beitrag war sehr interessant! >Könnte man einfach ein feststehendes Drehmagnetfeld in der >Wirbelstromglocke erzeugen anstatt etwas mittels Motor anzutreiben ? Tacho soll original bleiben Ich habe tatsächlich in der USA eine Firma gefunden, die eine Schnittstelle herstellen. https://www.dakotadigital.com/index.cfm/page/ptype=product/product_id=886/mode=prod/prd886.htm Die waren so freundlich und haben mir gesagt das sie so einen Motor von einer chinesischen marke benutzen: https://www.amazon.de/Dauermagnet-3500-8000RPM-Hochgeschwindigkeits-CW-CCW-Dauermagnet-DC-Motor-DIY-Generator/dp/B07KPFTVMS/ref=sr_1_2?keywords=12%2Bdc%2Bmotor%2B8000%2Brpm&qid=1707009219&sr=8-2&th=1 Da die Firma in dem Bauteil auch einen PID verbaut hat gehe ich mal davon aus das sich bei denen der Encoder mit am Motor befindet ( beispiel: https://eckstein-shop.de/Pololu-12V-Motor-with-64-CPR-Encoder-for-37D-mm-Metal-Gearmotors?srsltid=AfmBOooyq2LNGqpGaM7QRF2-NCJ2Pi6UBO064VJ6LIgJj3NIhYq5citSd3A) Dann bräuchte man doch nur noch eine H-Brücke und das Arduino um das ans laufen zu bekommen .. wobei ich die Lösung mit einem Bürstenmotor nicht so schön finde wie mit einem ohne Bürsten
Felix W. schrieb: > das sie so einen Motor von > einer chinesischen marke benutzen Ich vermute aber, das sie dir das wichtigste verschwiegen haben, denn dieser Motor hat nicht einmal eine Tachowicklung oder eine sonstige Geschwindigkeitsrückmeldung. Die wird wohl in dem schwarzen Kistchen sein. Edit: Oh, ich hätte zuerst den zweiten Teil deines Beitrags lesen sollen. Ja, ohne Encoder klappt das nicht und Bürtstenmotore haben eine endliche Lebensdauer. Ich habe ein paar BLDC von einer dicken Drone hier und wenn ich die wichtigsten Sturmschäden im Garten weg habe, kann ich das o.a. Prinzip der 'elektrischen Tachowelle' mit 3 Phasen mal testen. Allerdings gehe ich dabei davon aus, das die Drehzahl des unteren Abtriebes identisch istmit dem, was der Tacho benötigt. Ist das der Fall, oder musst du die Drehzahl anpassbar machen?
>Allerdings gehe >ich dabei davon aus, das die Drehzahl des unteren Abtriebes identisch >ist mit dem, was der Tacho benötigt. Ist das der Fall, oder musst du die >Drehzahl anpassbar machen? Das lineare Verhältnis zwischen Kardanwellendrehzahl und zu leistender Drehzahl des Elektromotors liegt bei 4,753 Beispiel: Tatsächliche Fahrzeuggeschwindigkeit = 1km/h Kardanwellendrehzahl=V-Fahrzeug*132,89 = 132,89 1/min geforderte Drehzahl Motor= n-Kwelle / 4,753 = 27,962 1/min Für mich sind Geschwindigkeiten ab ca.7-8km/h erst interessant anzuzeigen also: Tatsächliche Fahrzeuggeschwindigkeit = 8km/h Kardanwellendrehzahl=V-Fahrzeug*132,89 = 1063,12 1/min geforderte Drehzahl Motor= n-Kwelle / 4,753 = 223,67 1/min Somit bin ich auf die von mir geforderte min. Drehzahl des Motors von ca 240 1/min (=ca. 4 1/s) gekommen. Also man kann festhalten : Mit einem Bürstenmotor mit encoder, H-Brücke und Arduino Uno könnte es funktionieren, aber langfristig bringt der Motor zuviel negatives mit sich. Ich könnte auch einen BLDC-Motor mit Encoder verwenden zusätzlich dann auch wieder das Arduino Uno und evtl. ein einfaches Modelbau ESC-Modul.. die Regelung erfolgt dann über das Arduino?! oder ich benutzte einen BLDC mit nur 3 Phasen / ohne Encoder und kann dann mit einem Modelbau-ESC und dem Arduino Uno(ATMega 328), den Motor, einem PID (Avr 8-Bit) mit deinem FU-Projekt (Diagramm) laufen lassen. ist das so richtig?
Felix W. schrieb: > Mit einem Bürstenmotor mit encoder, H-Brücke > und Arduino Uno könnte es funktionieren, aber langfristig bringt der > Motor zuviel negatives mit sich. H-Brücke brauchts nicht, denn du willst ja nicht rückwärts drehen. Es reicht also 2Q oder sogar 1Q. > Ich könnte auch einen BLDC-Motor mit Encoder verwenden > zusätzlich dann auch wieder das Arduino Uno und evtl. ein einfaches > Modelbau ESC-Modul.. die Regelung erfolgt dann über das Arduino?! Ja, würde klappen. Felix W. schrieb: > oder ich benutzte einen BLDC mit nur 3 Phasen / ohne Encoder und kann > dann mit einem Modelbau-ESC und dem Arduino Uno(ATMega 328), den Motor, > einem PID (Avr 8-Bit) mit deinem FU-Projekt (Diagramm) laufen lassen. Den Modellbau ESC kannste dir sparen, denn die Motorkontrolle übernimmt ja der FU Generator. Es müssen nur 3 Halbbrücken als Endstufen angedockt werden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.