Moin Gemeinde, ich benötige mal einen Denkanstoß. Ich möchte die Drehrichtung eines Motors mit 2 unterschiedlichen DC Spannungsquellen steuern. Also z.B. Spannungsquelle 1 größer als Spannungsquelle 2, dann Drehrichtung z.B. rechts. Und wenn Spannungsquelle 1 kleiner als Spannungsquelle 2, dann Drehrichtung z.B. links. Beide Spannungsquellen gleich, dann Motor aus. Habe schon etwas rumprobiert, aber aktuell keine Idee. Könnt ihr mir helfen? VG
Was für ein Motor? Und ab welchem Unterschied der beiden Signale soll welche Drehrichtung gelten. Und was soll bei nahezu keinem Unterschied passieren?
Angehängte Dateien:
-

20240130_182519.jpg
200 KB
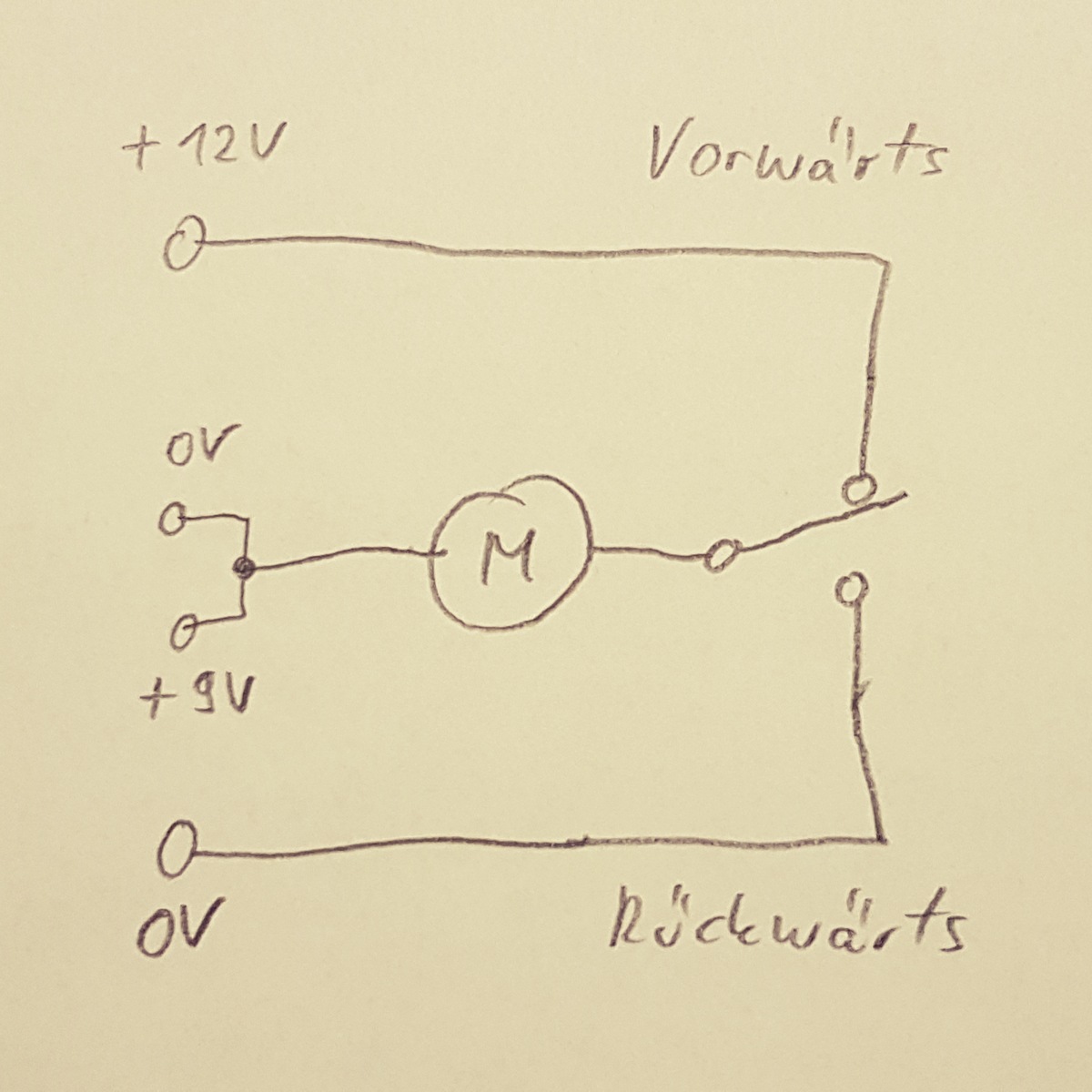
Ich habe da mal was erarbeitet. Einfach die beiden unterschiedlichen Spannungsquellen in Serie schalten (Plus mit Minus verbinden) und mit einem Relais umschalten.
Die Grundidee ist U1 auf einen Teiler 15k-100R-15k-Masse geben, U2 halbieren mit 4k7-4k7-Masse. Dann mit zwei Komparatoren die halbierte U2 mir den beiden Spannungen am 100R vergleichen. Ist fast wie ein Teil von Bild 1 hier: Beitrag "Re: Steuersignal bestimmt Polarität der Ausgangsspannung" Ggf noch Widerstände für eine Hysterese hinzufügen. Wenn die Spannungsunterschiede groß genug werden, aber nicht zu groß, dann einfach den Motor zwischen +U1 und +U2 schalten.
Wow, krass. Das ging schnell, aber ich checke noch nicht wann das Relais umschaltet.
Peter schrieb: > Beide Spannungsquellen gleich, dann Motor aus. Eine Spannung ist eine reelle Zahl. Es gibt keine 2 Spannungen, die absolut gleich sind. Glücklicherweise laufen Motoren bei geringer Spannung nicht an. Es gibt hunderte Losungsmoglichjeiten Motor direkt zwischen die 2 Spannungen klemmen. Motor an einen Leistungs-Operationsdifferenzverstärkrr klemmen, der beide Spannungen vergleicht und verstarkt. Motor an eine H-Brücke schalten, die mit PWM im Tastverhältnis der Spannungen getaktet wird. etc. Für eine PASSENDE Lösung müssen also viel mehr Salamischeiben her, die ganze Wurst bitte. eine Sonnennachführung per Sensor Sinn.
1 | +---+---+---- +12V |
2 | | | | |
3 | R R | R mit ähnlichem Widerstandswert wie die LDRs im Licht |
4 | | | | OpAmp, leistungsstark genug für den Motor, z. B. L272 |
5 | +---)--|+\ möglichst ein OpAmp ohne phase reversal |
6 | | | | >--(M)-- Masse |
7 | | +--|-/ |
8 | | | | |
9 | LDR LDR | |
10 | | | | |
11 | +---+---+---- -12V |
12 | |
13 | +------------------+-- +16..60V |
14 | | | |
15 | 10k +-----|+\ LM675 |
16 | | | | >--+-----+----+ |
17 | +--+--+ | +--|-/ | | | |
18 | |soll | | | | 1R | |
19 | 5KPoti-(---22k--(--+---1M---+ | (M) |
20 | | | | | 22n | |
21 | | 5kPoti--22k--+ +--|+\ | | |
22 | | ist| | | >--+--+--(----+ |
23 | +--+--+ +-----|-/ | | | |
24 | | | | | 1R | |
25 | 10k +--1M--(----+ | | |
26 | | | 22n | |
27 | +------------------+-------+--+-- GND |
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.