Hallo, ich habe einen Nema-17 Stepper (https://datasheetspdf.com/pdf-down/1/7/H/17HS4401S-Handson.pdf) den ich mit einem TMC2208 (https://c-3d.niceshops.com/upload/file/TMC2208-V3.0_manual.pdf) antreiben möchte. Zur Stromversorgung würde ich gerne ein 5V/27W USB-C-Netzteil einsetzten (z.B. https://www.berrybase.de/raspberry-pi-27w-usb-c-power-supply-netzteil-schwarz). Passt das, oder ist das zu schwach?
Frank B. schrieb: > mit einem TMC2208 Lies mal in deinem Link auf der 2. Seite die 8. Zeile: "Voltage Range 12V/24VDC" Damit findest du sicher selber eine Antwort auf deine Frage.
Und mit einem Step Up Spannungsregler komm' ich da nicht hin? Bei 12 V müssten das doch noch über 2 Ampere sein. (Ich bin Programmierer, kein Elektroniker. Viele Fallstricke erkenne ich nicht.)
Frank B. schrieb: > Und mit einem Step Up Spannungsregler komm' ich da nicht hin? > Bei 12 V müssten das doch noch über 2 Ampere sein. Und warum dann nicht gleich ein fertiges 12VDC-Netzteil?
Lothar M. schrieb: > Lies mal in deinem Link auf der 2. Seite die 8. Zeile Ooops, es kursieren unterschiedliche Fassungen von dem PDF: https://grobotronics.com/images/companies/1/datasheets/TMC2208-V3.0%20specification%20.pdf Die 4.75 bis 36 Volt Range hatte ich in Erinnerung. Der Hinweis "The accurate voltage of Vref can only be measured when themainboard is supplied with 12V or 24V voltage." ist aber in beiden Dokumenten enthalten - deswegen meine Verunsicherung. Harald W. schrieb: > Und warum dann nicht gleich ein fertiges 12VDC-Netzteil? Der Wunsch ist, ein Standard USB Power Supply zu nutzen.
Der Hersteller selbst gibt in seinem Shop auch eine Range von 4.75-36V an. https://biqu.equipment/collections/driver-board/products/biqu-bigtreetech-tmc2100-2208-2130-v1-0-stepstick-mks-stepper-motor-driver-ultra-silent?variant=8254027726946
Dann brauchst du ein "USB-PD Trigger Board" (einfach googeln) welches vom Netzteil die 9V, 15V oder 20V anfragt. Funktioniert natürlich dann nur mit entsprechend leistungsfähigen Netzteilen. Das R-Pi Netzteil kann anscheinend nur folgende PDOs: - 9V, 3A - 12V, 2.25A - 15V, 1.8A Interessant ist dass es 12V unterstützt, das ist keine Standard-Spannung. Das ist vermutlich zu wenig Strom für den Stepper. z.B. von Samsung oder Anker gibt es Netzteile mit mehr Leistung. Über normale USB-C-Kabel kann man nur 3A ziehen, es gibt auch welche mit 5A (mit eMarker).
Niklas G. schrieb: > Das ist vermutlich zu wenig Strom für den Stepper. Der braucht mit diesen Daten:
1 | • Phase Voltage: 2.6Vdc |
2 | • Phase Current: 1.7A |
maximal 4,5W pro Phase. Mit 2 Phasen insgesamt worst case 9W. Sollte also locker mit 27W zu schaffen sein...
OK. Vielen Dank, dann passt das ja :)
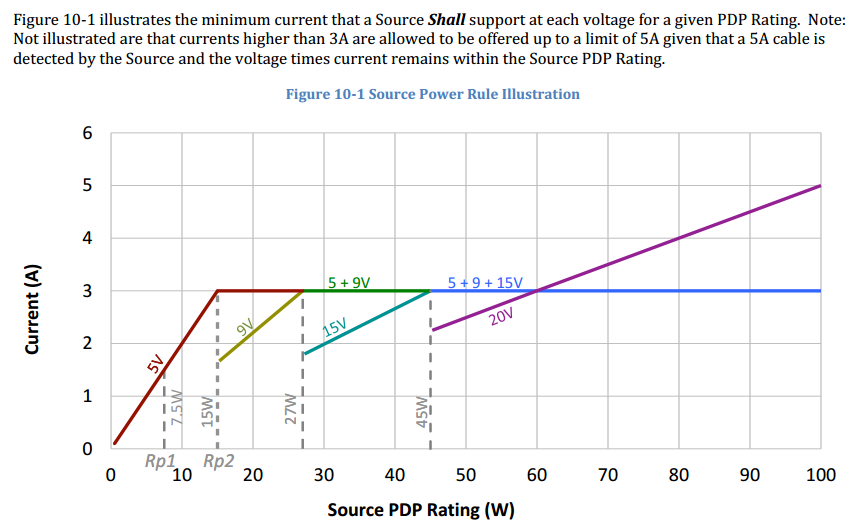
Eine kleine Falle gibt es da noch: Diese handelsüblichen USB-PD Triggerboards prüfen anscheinend (?) den von der Quelle unterstützten Strom nicht. Wenn die also z.B. nur 15V / 0.5A anbietet, wird das Board diese anfordern, und wenn man dann mehr Strom zieht könnte man theoretisch die Quelle beschädigen. Glücklicherweise schreibt die USB-PD-Spec vor, dass bei einer bestimmten angegebenen Leistung auch "sinnvolle" Ströme unterstützt werden sollen: https://miro.medium.com/v2/1*jTZ5lJBaea7POWCFjM4Ppw.png Wenn eine Quelle also 27W angibt, muss sie 9V / 3A unterstützen. Eine 45W-Quelle muss 15 V / 3A können. Wenn du also für das Projekt eine 27W oder 45W Quelle nutzt kannst du davon ausgehen dass die 3A auch unterstützt sind.
{kind=link}
Frank B. schrieb: > Der Hersteller selbst gibt in seinem Shop auch eine Range von 4.75-36V > an. Die Geschwindigkeit des Steppermotors hängt mit der Eingangspannung am TMC2208 Treiber zusammen. Denn die 2.6 V sind nur eine Nennspannung. Damit der Strom in den Spulen möglichst schnell auf 1,7A ansteigt, wird die volle Eingangspannung an den Steppermotor abgegeben, erst wenn der Strom 1.7 A erreicht, wird die Spannung runtergeschaltet. Bei 4.75V steigt der Strom langsam an, so dass nur "wenige" Steps pro Sekunde möglich sind. Vermutlich 1-2 Umdrehungen/sec Bei 12V kann der Nema17 mit etwa 4 Umdrehungen/sec gesteuert werden. Bitte auch darauf achten, dass der TMC2008 hier evtl nicht die beste Wahl ist, wegen der begrenzten Amperzahl. Der TMC2009 wäre wohl die bessere Wahl für 1.7A Phase Current
Hallo Daniel, Daniel D. schrieb: > Frank B. schrieb: >> Der Hersteller selbst gibt in seinem Shop auch eine Range von 4.75-36V >> an. > > Die Geschwindigkeit des Steppermotors hängt mit der Eingangspannung am > TMC2208 Treiber zusammen. Denn die 2.6 V sind nur eine Nennspannung. > Damit der Strom in den Spulen möglichst schnell auf 1,7A ansteigt, wird > die volle Eingangspannung an den Steppermotor abgegeben, erst wenn der > Strom 1.7 A erreicht, wird die Spannung runtergeschaltet. Nein, die Spannung wird nicht "runtergeschaltet". Der Strom wird begrenzt bzw. geregelt (Chopper-Regelung, quasi eine PWM). > Bitte auch darauf achten, dass der TMC2008 hier evtl nicht die beste > Wahl ist, wegen der begrenzten Amperzahl. Der TMC2009 wäre wohl die > bessere Wahl für 1.7A Phase Current Guter Hinweis. Bei 1,7A Nennstrom muss der Treiber 2,4A Dauerstrom liefern können. Die 1,7A beziehen sich nämlich auf den Vollschritt-Betrieb. Das entspricht beim Mikroschritt dem Moment, wo der Strom in beiden Wicklungen gleich groß ist (elektrisch 45°). Wenn nur eine Wicklung bestrom ist (Halbschritt-Position), ist der Strom um den Faktor Wurzel(2) höher. Auch die Verlustleistung im Treiber ist nicht zu vernachlässigen. Moderne Chips sind zwar sehr effizient geworden, aber wenn man die techischen Daten ausreizen will, muss auch das Kühlkonzept stimmen. Dass ist bei diesen Mini-Makerboards in der Regel nicht gegeben. Mit freundlichen Grüßen Thorsten Ostermann
Daniel D. schrieb: > Bitte auch darauf achten, dass der TMC2008 hier evtl nicht die beste > Wahl ist, wegen der begrenzten Amperzahl. Der TMC2009 wäre wohl die > bessere Wahl für 1.7A Phase Current Thorsten O. schrieb: > Guter Hinweis. Bei 1,7A Nennstrom muss der Treiber 2,4A Dauerstrom > liefern können. Die 1,7A beziehen sich nämlich auf den > Vollschritt-Betrieb. Das entspricht beim Mikroschritt dem Moment, wo der > Strom in beiden Wicklungen gleich groß ist (elektrisch 45°). Wenn nur > eine Wicklung bestrom ist (Halbschritt-Position), ist der Strom um den > Faktor Wurzel(2) höher. Danke für die Hinweise, ich muss höhere Drehzahlen erreichen (bis zu 900 RPM), aber nur ein paar Gramm rotieren (im mittleren zweistelligen Bereich). Das werde ich wohl nur mit Vollschritten erreichen. Die Frage ist, wie viele Ausfallschritte dann produziert werden und die Gesamtumdrehungszahl im Rahmen einer erträglichen Toleranz bleibt.
Moin, Frank B. schrieb: > Danke für die Hinweise, ich muss höhere Drehzahlen erreichen (bis zu 900 > RPM), aber nur ein paar Gramm rotieren (im mittleren zweistelligen > Bereich). Das Gewicht des Rotors nicht vergessen. Also 900RPM sind schon eine Nummer, das schaffen viele Motoren nur bei 24V oder noch mehr Spannung. Wenn im Datenblatt nichts steht, versuche einen vergleichbaren Motor zu finden, bei dem im Datenblatt Drehmoment über Drehzahl als Diagramm drin ist. Letztlich kochen alle Hersteller mit dem gleichen Wasser. > Das werde ich wohl nur mit Vollschritten erreichen. Die Frage ist, wie > viele Ausfallschritte dann produziert werden und die > Gesamtumdrehungszahl im Rahmen einer erträglichen Toleranz bleibt. Wenn er nicht mehr mitkommt (Schrittverluste trotz konstanter Ansteuerungs-Drehzahl) dann ist die Drehzahl eher undefiniert/zufällig. Gruß, Roland
Frank B. schrieb: > Danke für die Hinweise, ich muss höhere Drehzahlen erreichen (bis zu 900 > RPM) Spricht für eine Übersetzung zB. 10:1 oder einen BLDC.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.