Hallo, für ein Outdoor-Projekt habe ich eine 360° Überwachungskamera gekauft (kann sich horizontal 360° drehen und vertikal 90°), und das Kameramodul durch einen wasserdichten Entfernungssensor getauscht. In dieser Kamera sind 2 Step-Motoren (328BYJ-48) verbaut. Ich würde die Mechanik gerne so behalten weil sie theoretisch genau das tut, was ich möchte, nur die Platinen/Elektronik muss ich austauschen, da ich die Motoren auch einen eigenen integrierten Mikrocontroller ansprechen möchte. Meine konkrete Frage ist nun: in diesen Kameras sind keine Endschalter verbaut, sondern nur mechanische Begrenzungen. Das würde ich auch gerne so beibehalten, das bedeuten würde, dass ich die den Endanschlag über die Stromaufnahme der Motoren messen müsste. Meint Ihr, es reicht, einen Shunt in die Versorgungsleitung des Treibers (ULN2003A) zu packen und den Spannungsabfall dann mit dem Mikrocontroller zu messen? Oder macht es mehr Sinn, in die einzelnen Leitungen des Motors eine Strommessung zu integrieren? Vielen Dank und viele Grüße
Oz z. schrieb: > dass ich die den Endanschlag über die Stromaufnahme der Motoren messen > müsste. Das funktioniert bei Schrittmotoren nicht. Du steppst eifach so lange, dass er eine volle Drehung gemacht haben könnte, dann steht er garantiert am Anschlag.
Anderen Treiber nehmen (z.B. TM2209). Ist bei vielen 3D Drucker üblich einen "Sensorless Homing" und auch eine Kollisionserkennung durchzuführen.
Moin, das Problem ist ja, dass es ja immer einmal zu einem Stromausfall kommen kann und ich dann am Ende nicht mehr weiß, wo der Stepper steht, oder durch sonstige Bugs eventuell mal ein Step verloren geht; da würde ich doch gerne von Zeit zu Zeit die Endposition feststellen können.
Perfekt, vielen Dank, genau so etwas hatte ich gesucht!
Oz z. schrieb: > genau so etwas hatte ich gesucht! Kaum, ein TMC2209 funktioniert nicht mit Schrittmotoren die ein Oz z. schrieb: > ULN2003A bedient. Es ist auch nicht nötig, sich Sonderlicken zu kaufen. Jedes Flopppylaufwerk findet Spur 0.
Michael B. schrieb: > Jedes > Flopppylaufwerk findet Spur 0. Die Commodore 1541 ratterten gegen einen mechanischen Stopp, vernünftige Laufwerke hatten Gabel-Lichtschranken. Um aber noch etwas zum Thema beizutragen, man kann den Stepper auch (allein durch angepasstes Timing) mit weniger Kraft ansteuern. So das er noch sicher läuft, aber nicht wie eine Abrissbirne einschlägt.
Norbert schrieb: > Michael B. schrieb: >> Jedes >> Flopppylaufwerk findet Spur 0. > > Die Commodore 1541 ratterten gegen einen mechanischen Stopp, vernünftige > Laufwerke hatten Gabel-Lichtschranken. > Das hat die dann auch irgendwann damit bezahlt das sie keine Floppys mehr lesen konnte.
Michael B. schrieb: > Oz z. schrieb: >> genau so etwas hatte ich gesucht! > > Kaum, ein TMC2209 funktioniert nicht mit Schrittmotoren die ein Warum? Solche Motoren haben doch nur einen Mittelabgriff pro Spule zusätzlich. Einzig welche, die dann einen umgekehrten Wicklungssinn haben, führen zu Problemen. Anders herum (bipolarer Stepper an ULN...) funktioniert es definitiv nicht. Eine Steckplatine mit dem Controller bei einem Deutschen Händler für 7 Euro finde ich jetzt auch nichtübermäßig teuer - wennn man nicht in Serie gehen will.
Rahul D. schrieb: > Warum? > Solche Motoren haben doch nur einen Mittelabgriff pro Spule zusätzlich. ...die verbinden sind...
Michael B. schrieb: > Rahul D. schrieb: >> Michael B. schrieb: >>> ...die verbinden sind... >> >> Bitte, was? > > verbunden und? Wo ist das Problem? Den Mittelabgriff kann man bei bipolarer Ansteuerung ignorieren...
Michael B. schrieb: > Das funktioniert bei Schrittmotoren nicht. Du hast es nur noch nicht verstanden und musst deinem Nick unbedingt mal wieder alle Ehre machen. Building a Better Stepper Motor System with StallGuard and CoolStep Technologies https://www.analog.com/en/lp/001/building-better-stepper-motor-system.html Trinamic stallGuard2™ and coolStep™ https://www.youtube.com/watch?v=Prw7wNa20Gk Rahul D. schrieb: > Wo ist das Problem? Bei Induktivität und Spulenwiderstand, d.h. du bekommst bei höherer Schrittfrequenz vergleichsweise wenig Drehmoment - s. Datenblatt.
Michael B. schrieb: > ...die verbunden sind... Mit leerem Magen denkt sich das noch nicht so gut. Das Problem ist, dass es nicht unbedingt zwei getrennte Mittelabgriffe sind, sondern alle (vier) Spulen an einem gemeinsamenn Sternpunkt hängen. Dann funktioniert eine bipolare Ansteuerung natürlich nicht. Wenn es für jedes Paar einen eigenen Mittelabgriff gibt, sollte es funktionieren. Rainer W. schrieb: > Bei Induktivität und Spulenwiderstand, d.h. du bekommst bei höherer > Schrittfrequenz vergleichsweise wenig Drehmoment - s. Datenblatt. DAS ist doch ein Problem, das derzeit noch gar keins ist...
Rahul D. schrieb: > Das Problem ist, dass es nicht unbedingt zwei getrennte Mittelabgriffe > sind, sondern alle (vier) Spulen an einem gemeinsamenn Sternpunkt > hängen. > Dann funktioniert eine bipolare Ansteuerung natürlich nicht. Und warum nicht? Wie sich leicht aus der Bezeichnung 'bipolar' erkennen lässt, werden die Spulenenden mit gegensinniger Polarität angesteuert. Der Mittelabgriff liegt also in der Mitte - bei beiden Spulen. Und wenn beide Mittelabgriffe auf dem selben Potential liegen, kann dazwischen auch kein Querstrom fließen - selbst wenn sie verbunden sind.
Rainer W. schrieb: > Wie sich leicht aus der Bezeichnung 'bipolar' erkennen lässt, werden die > Spulenenden mit gegensinniger Polarität angesteuert. Der Mittelabgriff > liegt also in der Mitte - bei beiden Spulen. Bei einem einzigen, gemeinsamen Sternpunkt liegen die Spulen also parallel...
Rahul D. schrieb: > Bei einem einzigen, gemeinsamen Sternpunkt liegen die Spulen also > parallel... Frühstücke erstmal und dann guck dir bitte einmal an, wie ein Treiber für einen bipolaren Schrittmotor aufgebaut ist und wie damit die Spulen angesteuert werden. Ein Schrittmotor, bei dem die Mittelpunkte zu einem Sternpunkt verbunden sind, hat immerhin 5 Anschlussleitungen.
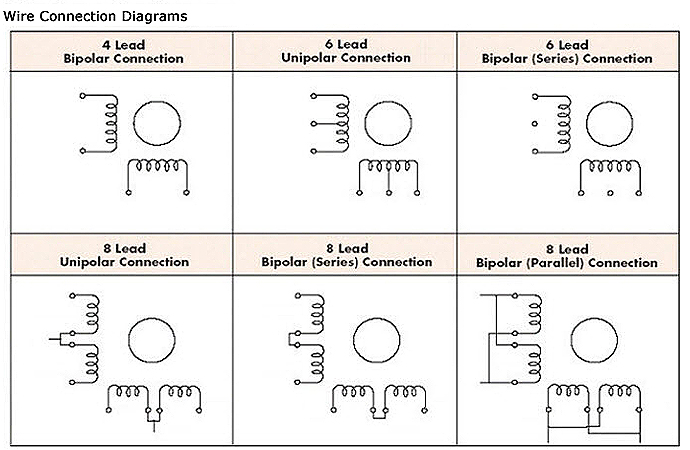
Rainer W. schrieb: > hat immerhin 5 Anschlussleitungen. Deswegen ist der nicht für bipolaren Betrieb geeignet. Er müsste sechs Anschlüsse haben: https://myhobby-cnc.de/wiki/lib/exe/fetch.php?media=myhobby-cnc:unipolar-vs-bipolar2.jpg von https://myhobby-cnc.de/wiki/doku.php?id=myhobby-cnc:schrittmotoren_unipolar_bipolar
{kind=link}
Rahul D. schrieb: > Deswegen ist der nicht für bipolaren Betrieb geeignet. WARUM? Wie ich schon schrieb: Rainer W. schrieb: > Der Mittelabgriff liegt also in der Mitte - bei beiden Spulen. Und wenn sich die Spannungen am Mittelabgriff nicht unterscheiden, ist es egal, ob sie verbunden sind, oder nicht. Wie sollte bei Spannungsdifferenz 0 irgendetwas passieren, wenn man die Punkte verbindet.
Rahul D. schrieb: > Mal es dir halt auf. Sag du mir, warum es mit verbundenen Mittelpunkten nicht gehen soll. Du musst nur dafür sorgen, dass beide Spulen immer bipolar angesteuert werden. Guck dir die Spannungen an den Mittelpunkten an. Dann wirst du verstehen was ich meine.
Rainer W. schrieb: > Michael B. schrieb: >> Das funktioniert bei Schrittmotoren nicht. > > Du hast es nur noch nicht verstanden Im Gegensatz zu deiner ADHS Aufmerksamkeitsspanne habe ich weitergelesen Oz z. schrieb: > Treibers (ULN2003A) Dass du ihm einen anderen Treiber und in Konsequenz ein Auswechseln des Schrittmotors nahe legst - nun ja, Irre gibt es immer wieder. Rainer W. schrieb: > Sag du mir, warum es mit verbundenen Mittelpunkten nicht gehen soll. > Du musst nur dafür sorgen, dass beide Spulen immer bipolar angesteuert Liest du eigentlich auch das Datenblatt des Rahul D. schrieb: > TMC2209... oder bist du einfach nur doof ?
Michael B. schrieb: > Im Gegensatz zu deiner ADHS Aufmerksamkeitsspanne habe ich weitergelesen > > Oz z. schrieb: >> Treibers (ULN2003A) Dann ist es vielleicht an der Zeit, sich von diesem fast 50 Jahre alten Urgestein von SM-Treiber zu trennen und zu gucken, was sich im letzten halben Jahrhundert so getan hat.
Oz z. schrieb: > da würde > ich doch gerne von Zeit zu Zeit die Endposition feststellen können. dann baue doch einen Endschalter und/oder eine Lichtschranke ein am Ende des Drehwinkels. Wo ein Wille ist is auch eine Möglichkeit.
So, erst einmal vielen Dank für Eure Antworten. Ich werde jetzt die alten Treiber aussortieren (die hatte ich hier einfach noch liegen), und stattdessen neue Treiber einbauen. Ich habe gesehen, dass sich die 28BYJ mit wenig Aufwand vom Unipolaren zum Bipolaren Schrittmotor umbauen lassen, das probiere ich jetzt einfach einmal aus, da es mir momentan am Einfachsten vorkommt. Den Motor würde ich einfach ungerne austauschen, da die Welle der eingebauten 28BYJ einfach schon zu den Gegenseiten der Mechanik passt.
Oz z. schrieb: > in diesen Kameras sind keine Endschalter verbaut, sondern > nur mechanische Begrenzungen. Das würde ich auch gerne so beibehalten Offenbar ist die originale Kamera in der Lage, nur mit diesen mechanischen Begrenzungen eine Initialposition zu finden. Kann es sein, dass die Motoren nicht starr, sondern über Rutschkupplungen mit dem Kameraträger verbunden sind?
Peter S. schrieb: > Kann es sein, dass die Motoren nicht starr, sondern über > Rutschkupplungen mit dem Kameraträger verbunden sind? Warum eine zusätzliche Rutschkupplung, wenn der Motor konstruktionsbedingt schon eine enthält?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.