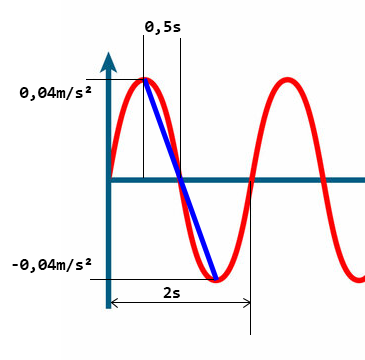
Hallo, ich wohne in einem Hochhaus und möchte mit einem ADXL355 Beschleunigungssensor die Gebäudebewegungen messen. Das gelingt mir auch ganz gut und ich sehe sehr schön, dass das Gebäude permanent mit ca 0,5 Hz schwingt. Weht der Wind, ist die Amplitude noch größer und eine Hängepflanze, die ein Pendel mit 1 m Länge darstellt, wird zum Schwingen angeregt. Soweit so gut. Probiere ich allerdings die Beschleunigung in Bewegung umzurechnen dann scheitere ich. Mir ist klar, dass das 2malige integrieren jeden Fehler brav aufsummiert und ich so keine vernünftigen Werte für die Distanz erhalte, wenn ich das über längere Zeiträume probiere. Da es sich aber um einen schönen Sinus handelt, reicht es mir wenn ich die Distanz zwischen dem Maximum und Minimum errechne. Da erhalte ich aber bei einer Gebäudehöhe von ca 90m eine Bewegung von 0,2mm, was unrealistisch wenig ist. Um die Amplitude besser unter Kontrolle zu haben, habe ich den ADXL355 in die Hängepflanze gelegt (hart mit dem Blumentopf gekoppelt), lenke den Blumentopf 50mm manuell aus, halte ihn dort und lasse ihn dann in x-Achse des Sensors frei pendeln. Die so gemessene maximale Amplitude beträgt 0,04m/s² und der Sinus hat eine Periodenlänge von 2s. Um die ganze Sache zu vereinfachen, rechne ich nicht mit einem Sinus, sondern einer geraden (siehe blaue Linie). Das ist nicht ganz korrekt, der Fehler wird aber nicht gigantisch sein. Bei der maximalen Auslenkung des Pendels erfährt der Sensor die maximale Beschleunigung, und am untersten Punkt (also auf halbem Wege) gar keine Beschleunigung. Diesen halbe Bewegungsamplitude kann man also wiefolgt berechnen: s=a*t² Da es keine konstante Beschleunigung, sondern eine linear auf 0 sinkende Beschleunigung ist, kann man mit der Durchschnittsgeschwindigkeit (also 0,04m/s² / 2) rechnen: s=0,04m/s² / 2 * 0,5s² = 0,005m = 5mm Das Ergebnis ist also um den Faktor 10 daneben und ich habe keine Erklärung dafür. Wenn ich nicht obige Näherungsformel verwende, sondern brav das Integral über die Messwerte rechne, erhalte ich ebenfalls nur ca 5mm statt 50mm. Was ich bis jetzt probiert habe um dem Problem auf die Schliche zu kommen: 1) Messung mit einem anderen Sensor (LIS2HH12), aber gleichem Ergebnis 2) Kontrolle ob der Sensor überhaupt in allen 3 Achsen 1g=9,81m/s² meldet wenn ich ihn in der entsprechenden Achse Richtung Boden richte = Ja dh. es besteht kein Auslese/Konvertierungsfehler 3) Beide Sensoren auf einen kugelgelagerten linearen Schlitten befestigt und manuell 70mm bewegt. Nach doppelter Integration der Beschleunigungswerte komme ich beim LIS2HH12 immerhin auf 100mm und mit dem wesentlich besserem ADXL355 auf 65mm. Meine Berechnung ist also korrekt, aber aus irgendeinem Grund funktioniert diese Berechnung nicht wenn die Sensoren auf einem Pendel hin/her schwingen. Mir ist bewußt dass sich ein Pendel nicht nur in x-Richtung bewegt, aber bei einem 1m Pendel und 50mm Auslenkung ist der Winkel bestimmt minimal und vernachlässigbar. Auf jeden Fall wird das Ergebnis nicht darum um den Faktor 10 abweichen. im Anhang die Messwerte ADXL355swing.xlsx ADXL355 auf dem Hängepflanzenpendel mit 50mm Auslenkung und 50ms Messintervall AccelSensorCompare.xlxs 2 unterschiedliche Sensoren auf Linearschlitten und 70mm Bewegung bei 33ms Messintervall
Angehängte Dateien:
-

AccSwing.png
33 KB
Hi, sorry, ich schaffe es gerade auch nicht mir zu überlegen wo genau der Denkfehler ist, vielleicht fällt mir im Laufe des Tages was ein. Aber: Dein Modell funktioniert schon auf dem Papier nicht, mit ungefähr demselben Fehler. Rechne mal die Beschleunigung auf eine Masse an einem 1 m langen Faden aus, der um 5 cm =~ 0.46 Grad ausgelenkt ist. Die ist ungefähr 0.078 m/s², grob vergleichbar mit dem was du misst. s = 1/2 a t² ergibt für t = 0.5 s damit ungefähr 1 cm, nicht 5 cm.
Beitrag #7632084 wurde von einem Moderator gelöscht.
Wenn den Weg mit s = 1/2*a*t^2 ausrechne, komme ich schon auf andere Werte (25mm statt 16mm). Und wenn Du mit 0,033s/Sample abgetastet hast, dann hättest Du in Tabelle 1 eigentlich zwei Perioden drauf haben müssen, ich sehe aber nur eine. Was sind das also für Messwerte? Dein Haus sicher nicht.
Angehängte Dateien:
-

5cmAuslenkung.png
30 KB
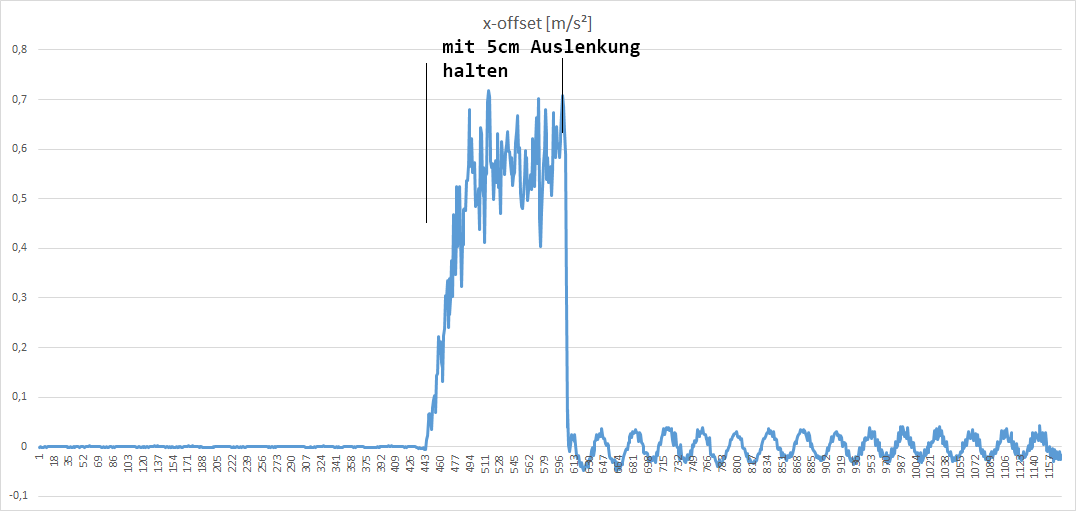
@ Sven, Das Problem ist noch viel perverser: Wenn ich die Hängeblume aka Pendel halte passt alles, aber sobald ich sie auslasse stimmen die Beschleunigungswerte nicht mit meinem Verständnis überein. 5cm Auslenkung bei 100cm Faden ergibt docht atan(5/100)=2,86 Grad (ich glaube deine Berechnung stimmt nicht). Was wiederrum sin(2,86) einen Faktor von 0,05 für g und somit ca 0,49 m/s² entspricht. Wie du in angehängter Grafik siehst, messe ich ca 0,5 m/s² solange ich das Pendel 5cm ausgelenkt halte. Sobald ich es allerdings auslasse, schwingt es frei (dieser kleine Sinus) aber mit deutlich kleinerer Beschleunigungsamplitude. Es wird aber beim Schwingen wieder der gleiche Ort im Raum mit 5cm Auslenkung erreicht. danke @Martin, aber ich glaube hier liegt ein Missverständnis vor. Michael P. schrieb: > AccelSensorCompare.xlxs 2 unterschiedliche Sensoren auf Linearschlitten > und 70mm Bewegung bei 33ms Messintervall Bei diesem Excel-Sheet geht es, wie beschrieben, um eine Kontrolle: 2 Sensoren wurden auf einen Linearschlitten gepackt und 70mm in Richtung der x-Achse mit dem Finger bewegt. Es geht hier nicht um ein Pendel. Linearschlitten, damit ich garantiert nur eine Bewegung in x-Achse habe. Dieser Test war erfoglreich, ich komme Pi*Daumen mit beiden Sensoren rechnerisch in den Bereich 70mm. Das andere Excel-Sheet ADXL355swing.xlsx (dessen Screenshot du auch in diesem Beitrag siehst), zeigt lediglich die Schwingbewegung der Hängeplanze und nicht die des Hauses. Solange ich diese definierte Schwingung der Hängepflanze mit einer Amplitude von 5cm nicht aus den Beschleunigungswerten berechnen kann, muss ich es auch nicht mit der Gebäudebeschleunigung probieren.
Ups... Faktor 2 Pi vergessen. Bin wohl ziemlich aus der Übung. Sorry. Das Diagramm ist gut, da sieht man denke ich das Problem: du siehst hier gar nicht die Beschleunigung, du siehst nur die Zentrifugalkraft. Die Beschleunigung ist Freifall und damit in dem Bezugssystem in dem du misst null. Oder? Das Diagramm ist ja auch "out of phase", direkt nach dem Loslassen ist (modulo einem kleinen Rauscher) die gemessene Beschleunigung 0, und schwingt erst danach, beim "Nulldurchgang" am tiefsten Punkt, auf ihren Maximalwert nach oben (bzw. nach unten, denn es wird ja nach oben beschleunigt).
Sven B. schrieb: > Das Diagramm ist gut, da sieht man denke ich das Problem: du siehst hier > gar nicht die Beschleunigung, du siehst nur die Zentrifugalkraft. Die > Beschleunigung ist Freifall und damit in dem Bezugssystem in dem du > misst null. Oder? Bin mir da nicht so ganz sicher. Der Sensor weiß ja gar nicht, dass er eigentlich am Ende eines Pendels hängt. Die Trägheit, auf der ja das Messprinzip des MEMS Beschleunigungssensors beruht, sollte ja noch immer für den Sensor gelten. Alles was der Sensor mitbekommt ist, dass er in X-Achse sinusförming hin/herbewegt wird.
Ob Sinus oder nicht interessiert für den Sensor doch gar nicht. Es gibt die Beschleunigungen in den drei Achsen. Dabei sollte Z für das Gebäude hoffentlich unerheblich sein, sonst wäre das schon eine sehr heftige Auslenkung. Also für X und Y einach den aktuellen Beschleunigungswert mal der Zeitspanne pro erfasstem Wert nehmen, davon ausgehen, dass der Wert für den Zeitraum zwischen zwei Messungen nicht so sehr abwich und daraus die zurückgelegte Strecke sowie die aktuelle Geschwindigkeit ermitteln. Mehr Messwerte (also kürze Intervalle) erhöhen die Genauigkeit.
Michael P. schrieb: > Bin mir da nicht so ganz sicher. Der Sensor weiß ja gar nicht, dass er > eigentlich am Ende eines Pendels hängt. Die Trägheit, auf der ja das > Messprinzip des MEMS Beschleunigungssensors beruht, sollte ja noch immer > für den Sensor gelten. Alles was der Sensor mitbekommt ist, dass er in > X-Achse sinusförming hin/herbewegt wird. 1. Wie ist sicher gestellt, das er genau um die x-Achse pendelt? Die Messwerte sagen was anderes. 2. Ich würde davon ausgehen, das die Sensoren-Z-Achse parallel zur Pendelachse läuft, somit wird von der "X-Achse" aber auch ein Anteil der Erdbeschleinigung gemessen. 3. Die Zentripedalbeschleunigung wird immer bei v>0 gemessen. Die Frage ist, wie sie mit den Achsrichtungen übereinstimmt. 4. Der Ausschlag ver dem loslassen deutet darauf hin, dass die Sensorebene stärker verkippt gehalten wurde.
Guido K. schrieb: > dass der Wert für den Zeitraum zwischen zwei Messungen nicht so sehr > abwich Setzt einen entsprechend guten Sensor voraus. Sofern ein entsprechendes Rauschen vorhanden ist, muss man etwas in die Glättung des Signals investieren, um noch brauche Werte für die Verschiebung zu bekommen.
Diese Werte sollten bei einer Messung in etwa rauskommen.
@re_d228 du hast mit all deinen Punkten recht, aber das erklärt nicht warum ich um den Faktor 10 daneben liege. Vielleicht weiche ich wegen dieser Punkte um 20% ab, von mir aus um 100% aber Faktor 10? Die Verkippung des Sensors ist minimal, und definitiv im Bereich der oben berechneten 3 Grad. Das ist bei Weitem nicht genug, dass die Z-Komponente das Ergebnis um den Faktor 10 verdreht.
Was sagt denn die statische Umschlagmessung? Kommt dabei +- 1g raus?
Michael P. schrieb: > Die Verkippung des Sensors ist minimal, Das solltest du schon etwas genauer betrachten. Immerhin spielt dir dadurch die Schwerebeschleunigung von 9.81m/s² in die x-Komponente rein und zwar mit dem Sinus deines Auslinkungswinkels.
Joe G. schrieb: > Diese Werte sollten bei einer Messung in etwa rauskommen. Ich weiß, aber ich erhalte eben nicht 0,5 m/s² sondern nur 1/10 davon, und das mit 2 völlig unterschiedlichen Sensoren. Joe G. schrieb: > Was sagt denn die statische Umschlagmessung? Kommt dabei +- 1g raus? schon gemacht, alles ok, siehe erster Post Rainer W. schrieb: > Das solltest du schon etwas genauer betrachten. Immerhin spielt dir > dadurch die Schwerebeschleunigung von 9.81m/s² in die x-Komponente rein > und zwar mit dem Sinus deines Auslinkungswinkels. Siehe Grafik im 4. Beitrag von oben. Die Schwerebeschleunigung sieht man schön, wenn ich das Pendel 5cm ausgelenkt halte. Wenn ich es schwingen lasse plötzlich nicht mehr.
Michael P. schrieb: > Wenn ich es schwingen lasse plötzlich nicht mehr. Ich würde erwarten, dass alle Kräfte senkrecht zum Haltefaden Null sind. Wie ist der Sensor genau gegenüber dem Haltefaden orientiert?
Michael P. schrieb: > Siehe Grafik im 4. Beitrag von oben. > Die Schwerebeschleunigung sieht man schön, wenn ich das Pendel 5cm > ausgelenkt halte. Wenn ich es schwingen lasse plötzlich nicht mehr. Und jetzt denk mal darüber nach, warum!
Michael P. schrieb: > 5cm Auslenkung bei 100cm Faden ergibt docht atan(5/100)=2,86 Grad (ich > glaube deine Berechnung stimmt nicht). Was wiederrum sin(2,86) einen > Faktor von 0,05 für g und somit ca 0,49 m/s² entspricht. Wer rechnet denn bei solchen Aufgaben mit Graden? Ausserdem hilft es, nicht zwischen Angaben in Millimetern und Metern hin und her zu springen. Der Einheitskreis mit 1m Radius hat einen Umfang von 2pi, also 6,28m. Die Schwingungsamplitude von 0,05m entspricht somit einem Winkel von 6,28/20 = pi/10 oder 0,314 im Bogenmaß, und mit diesem Winkel darfst du nun nach Herzenlust weiterrechnen. Außerdem gilt für kleine Winkel (z.B. die Schwingungsamplitude des Hochhauses) sin(alpha) = tan(alpha) = alpha Das erleichtert die folgenden Integrationen ungemein ;-)
Re D. schrieb: > Und jetzt denk mal darüber nach, warum! Kleiner Tipp noch, in Ruhelage hast du ein 1g in z- Richtung aber deine Geschwindigkeit wird nicht größer. Wenn du das Ding fallen lässt, wird im Moment des loslassens die eine Beschleunigung von 0 angezeigt.
Michael P. schrieb: > Ich weiß, aber ich erhalte eben nicht 0,5 m/s² sondern nur 1/10 davon, > und das mit 2 völlig unterschiedlichen Sensoren. Merkwürdig. Im ersten Moment hätte ich auf den fehlenden Faktor von 9.81 getippt, in der Excel-Berechnung ist er jedoch enthalten.
Hp M. schrieb: > Das erleichtert die folgenden Integrationen ungemein ;-) Da die Rechnung nicht mit Hilfe von Logarithmentafel und spitzem Bleistift von Hand durchgeführt werden muss, ist das aktuell völlig egal. Noch liegt das Problem beim physikalischen Verständnis und nicht bei der Suche nach tauglichen Näherungsverfahren.
Es ist halt tricky, solch kleine Beschleunigungen, wie sie das Haus vollführt, vom ungleich stärkeren Schwerefeld der Erde sauber abzugrenzen. Ich hab mal ähnliches mit einer Wasserrakete versucht. 200ms mit 16g und dann ein ballistischer Flug, da versuch mal die Fluglage und -position draus aufzuintegrieren ... LG, Sebastian
Sebastian W. schrieb: > 200ms mit 16g und > dann ein ballistischer Flug, da versuch mal die Fluglage und -position > draus aufzuintegrieren ... Im ballistischen Flug wird dir so ein MEMS keine Beschleunigungswerte liefert oder wolltest du die Bremskräfte durch die Luftreibung auswerten?
Angehängte Dateien:
-

Untitled-1.png
7 KB
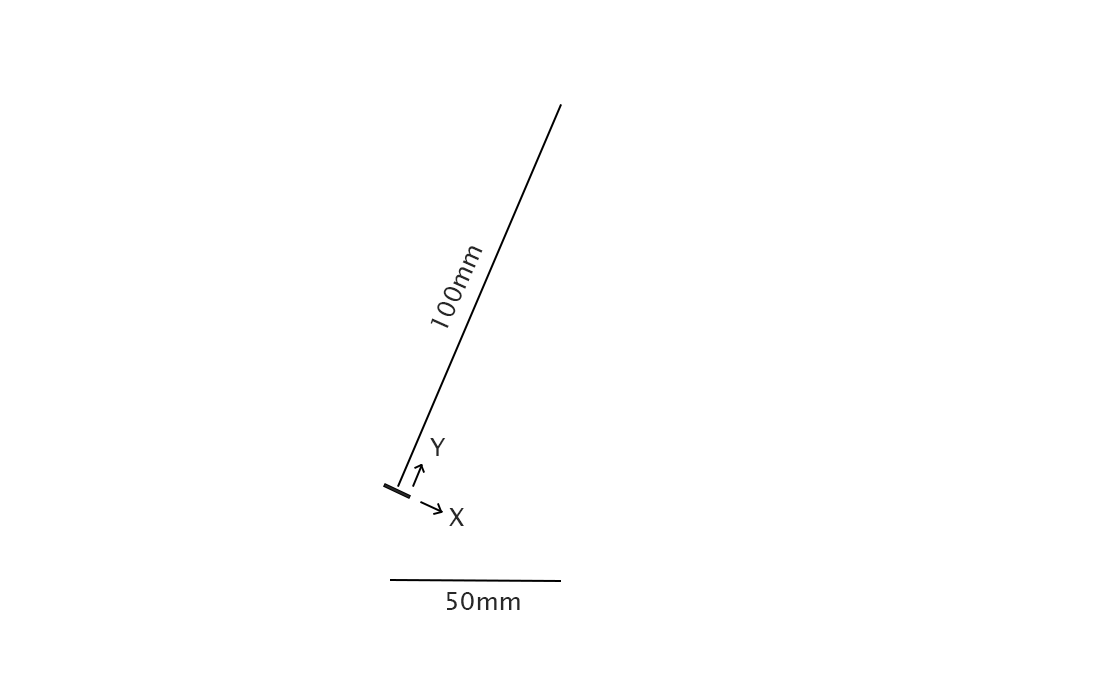
Rainer W. schrieb: > Michael P. schrieb: >> Wenn ich es schwingen lasse plötzlich nicht mehr. > > Ich würde erwarten, dass alle Kräfte senkrecht zum Haltefaden Null sind. > Wie ist der Sensor genau gegenüber dem Haltefaden orientiert? Sorry, das ist kein unwesentliches Detail das ich bis dato nicht beschrieben habe. Siehe Anhang, die Y-Achse zeigt Richtung Betrachter
Rainer W. schrieb: > Im ballistischen Flug wird dir so ein MEMS keine Beschleunigungswerte > liefern. Eben. Wobei, er liefert schon, aber halt (fast) Null in allen Achsen (trudeln mal außen vor) ... LG, Sebastian
Michael P. schrieb: > Siehe Anhang, die Y-Achse zeigt Richtung Betrachter Bei einer periodischen Bewegung von +- 2.86 Grad, sollte doch die Beschleunigung der x-Achse mit +- 0.5 m/s² überlagert sein, also dem statischen Anteil der Erdbeschleunigung. Das vermisse ich in der Messung. Hier scheint mir der Wurm versteckt zu sein.
Joe G. schrieb: > Bei einer periodischen Bewegung von +- 2.86 Grad, sollte doch die > Beschleunigung der x-Achse mit +- 0.5 m/s² überlagert sein, also dem > statischen Anteil der Erdbeschleunigung. Das vermisse ich in der > Messung. Hier scheint mir der Wurm versteckt zu sein. Da ich den Sensor nicht perfekt waagerecht ausrichten kann, habe ich im Excel Sheet den konstanten Offset subtrahiert. Der wirkt sich ja nicht auf das Delta Min/Max der Beschleunigungswerte aus.
Sebastian W. schrieb: > Eben. Wobei, er liefert schon, aber halt (fast) Null in allen Achsen > (trudeln mal außen vor) ... Nur die Abbremsung durch die Luft kann er dir liefern. Da der Sensor in der ersten Flugphase aber die 16g vertragen muss, hast du da mindestens ein Problem mit der Dynamik des Sensors. Daraus trotz Sensoroffset die Fluglage abzuleiten, hört sich in der Tat spannend an. Michael P. schrieb: > Siehe Anhang, die Y-Achse zeigt Richtung Betrachter Ich nehme mal an, der Betrachter sitzt am Aufhängepunkt ;-) Auf der X-Achse kann der Sensor also nichts von 0 verschiedenes messen, solange die träge Masse des Fadens und die Luftreibung nicht zum Durchhängen des Fadens führen. Die Genauigkeit deines Einbaus entscheidet darüber, wie exakt diese 0 erreicht wird.
Ich glaube, ich habe mich mißverständlich ausgedrückt. Wenn x die Tangentialrichtung des Pendels ist, schwankt doch auch die statische Komponente dieser Tangentialrichtung periodisch mit der Schwingfrequenz. Bei +2.86 Grad Pendelauslenkung habe ich noch 0.5 m/s² in der Senkrechten. Hat das Pendel den Winkel 0 Grad, ist diese Komponente null und bei -2.86 Grad habe ich wieder 0.5 m/s². Diesen periodischen Anteil vermisse ich bei x.
Joe G. schrieb: > Ich glaube, ich habe mich mißverständlich ausgedrückt. Glaube ich nicht. Joe G. schrieb: > Bei einer periodischen Bewegung von +- 2.86 Grad, sollte doch die > Beschleunigung der x-Achse mit +- 0.5 m/s² überlagert sein Woher soll die Kraft dafür kommen? Da müsste irgend ein Heinzelmännchen das Sensor-IC oder die Probemasse darin festhalten. Da beide in X-Richtung aber kräftemäßig den gleichen Bedingungen ausgesetzt sind (kräftefrei), kommt auch keine Differenz zu Stande, die auf der X-Komponente zu einem von 0 verschiedenen Signal führen könnte.
Rainer W. schrieb: > Woher soll die Kraft dafür kommen? Es ist keine Kraft notwendig. Die Erdbeschleunigung ist immer senkricht und der Sensor (x-Achse) pendelt auf der Tangente einer Kreisbahn. Damit habe ich bei +-90 Grad Pendelauschlag genau 1g und bei null Grad Pendelausschlag 0g
Joe G. schrieb: > Damit habe ich bei +-90 Grad Pendelauschlag genau 1g Bei +-90 Grad Pendelausschlag befindet sich das Pendel wohl im freien Fall, und der Sensor wird in allen Achsen 0g messen. Oder? LG, Sebastian
Sebastian W. schrieb: > Bei +-90 Grad Pendelausschlag befindet sich das Pendel wohl im freien > Fall, und der Sensor wird in allen Achsen 0g messen. Oder? Richtig Re D. schrieb: > Wenn du das Ding fallen lässt, wird im Moment des loslassens die eine > Beschleunigung von 0 angezeigt.
Joe G. schrieb: > Es ist keine Kraft notwendig. Die Erdbeschleunigung ist immer senkricht > und der Sensor (x-Achse) pendelt auf der Naja, streng genommen gilt F=ma, nennt sich Schwerkraft.
Sebastian W. schrieb: > Bei +-90 Grad Pendelausschlag befindet sich das Pendel wohl im freien > Fall, und der Sensor wird in allen Achsen 0g messen. Oder? Nur, wenn das Pendel bei 0° Auslenkung exakt so viel kinetische Energie hat, dass der Totpunkt der Pendelauslenkung bei den 90° erreicht wird. Ist es schneller, wirkt die Zentripetalkraft auf den Pendelkörper und der Sensor gibt die Zentrifugalkraft auf der Achse aus, die bei 0° Auslenkung die Erdbeschleunigung misst. Hier geht es aber um sehr kleine Auslenkungen. Von Freifall kannst du nur ausgehen, wenn der Pendelkörper in Z-Richtung mit 9.81m/s^2 beschleunigt. Da wirst bei unter 5° Auslenkung weit darunter liegen. Weiter oben rechnete jemand 0.5m/s^2 vor. Aber für den angezeigten Wert, nicht für die tatsächliche Z-Komponente der Beschleunigung des Pendelkörpers.
Michael P. schrieb: > Da es keine konstante Beschleunigung, sondern eine linear auf 0 sinkende > Beschleunigung ist, Wie kommst du denn darauf? Linear ist lediglich die Beziehung zwischen Kraft und Winkel. Die Kraft, die in Bahnrichtung auf die Masse wirkt, ist (für kleine Winkel) proportional zur Auslenkung. Dabei spielt aber die Zeit keine Rolle, die erst für Geschwindigkeit und Beschleunigung wichtig wird. Da wir schon wissen, dass (ebenfalls für kleine Winkel) am Ende eine sinusförmige Schwingung herauskommt, haben auch die erste und zweite Ableitung der Weg-Zeit-Funktion, also Geschwindigkeit und Beschleunigung, einen sinus- bzw. cosinusförmigen Verlauf.
Also bei der Gebäudeschwingung nehm ich mal an, dass das Gebäude eher wie ein Trapez schwingt, also nicht verkippt. Daher die Amplitude in der Horizontalen stimmt und nicht korrigiert werden muss. Um aus der sinusförmigen Schwingbeschleunigung a mit Frequenz f auf den Schwingamplitude s zu kommen, kann man einfach s = a/ (2*Pi*f)² rechnen. Also (doppelte) Integration im Frequnzbereich statt im Zeitbereich. Nimmt man jetzt f als Konstante an, kann man den analaogen MEMS gleich an ein analoges Zeigerinstrument tüddeln und die Skala in m beschriften. a und s haben entgegengesetzte Vorzeichen (180° Phase) , aber das tut der Freude am Zeigergezappel keinen Abbruch :)
Joe G. schrieb: > Es ist keine Kraft notwendig. Natürlich ist eine Kraft nötig, damit dein Sensor ein von Null verschiedenes Signal ausgeben kann. So ein MEMS misst die Differenz der auf Gehäuse und interne Probemasse wirkenden Beschleunigungen, d.h. nur Kräfte die in Richtung des Fadens wirken, führen zu einem Signal. In X und Z nimmt der Faden keine Kraft auf, also wirken in diesen Komponenten keine Zwangskräfte auf das Gehäuse und der Sensor kann in diesen beiden Komponenten auch nichts messen. Deine minimale Restschwingung deutet auf einen Restfehler bei der Ausrichtung hin.
Ich glaube ich habe es noch nicht verstanden. Der Sensor weiß doch nicht dass er am Ende eines Pendels hängt. Alles was die Probemasse erfährt ist eine Bewegung und daher der Sensorausschlag. Ich überprüfe aber gerne deine Theorie: in welche Richtung falsch müsste ich den Sensor installieren um die Amplitude der minimalen Restschwingung zu variieren?
Michael P. schrieb: > in welche Richtung falsch müsste ich den Sensor installieren um die > Amplitude der minimalen Restschwingung zu variieren? Die Amplitude der Restschwingung hängt davon ab, wie genau die Y-Komponente in Richtung des Fadens orientiert ist und wie kräftig die Querempfindlichkeit zwischen X- und Y-Achse bei deinem Sensor zuschlägt. Im Datenblatt ist ein typischer Wert von 1% angegeben (Cross Axis Sensitivity).
Angehängte Dateien:
-

PendelUebersicht.png
7 KB
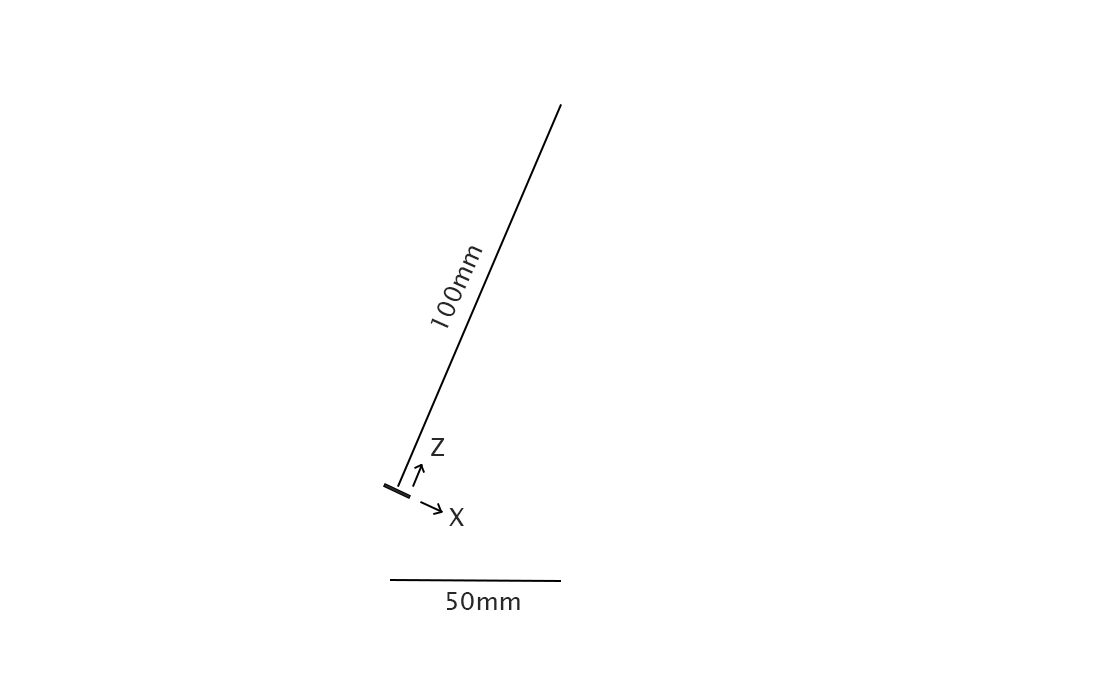
OMG, ich merke gerade dass ich Gestern Abend, als ich noch schnell das Übersichtsbild des Pendels gezeichnet habe, einen Brainerror hatte. Die Z-Achse zeigt natürlich hinauf (weg vom Erdmittelpunkt). Die Y-Achse zeigt Richtung Betrachter. Die Grafik hier ist richtig. SORRY!!! Rainer W. schrieb: > Ich nehme mal an, der Betrachter sitzt am Aufhängepunkt ;-) > Auf der X-Achse kann der Sensor also nichts von 0 verschiedenes messen, > solange die träge Masse des Fadens und die Luftreibung nicht zum > Durchhängen des Fadens führen. > Die Genauigkeit deines Einbaus entscheidet darüber, wie exakt diese 0 > erreicht wird. Deine Verwirrung ist leider meiner falschen Grafik gestern geschuldet. Der Betracht sitzt nicht im Aufhängepunkt ;-) Er betrachtet die Grafik von vorne.
Rainer W. schrieb: > Die Amplitude der Restschwingung hängt davon ab, wie genau die > Y-Komponente in Richtung des Fadens orientiert ist und wie kräftig die > Querempfindlichkeit zwischen X- und Y-Achse bei deinem Sensor zuschlägt. > Im Datenblatt ist ein typischer Wert von 1% angegeben (Cross Axis > Sensitivity). Ok ich werde 2-3 Versuche machen, und die Z-Achse (sorry für die Verwirrung) die Richtung Faden zeigt etwas variieren.
Angehängte Dateien:
-

Pendel.jpg
43 KB
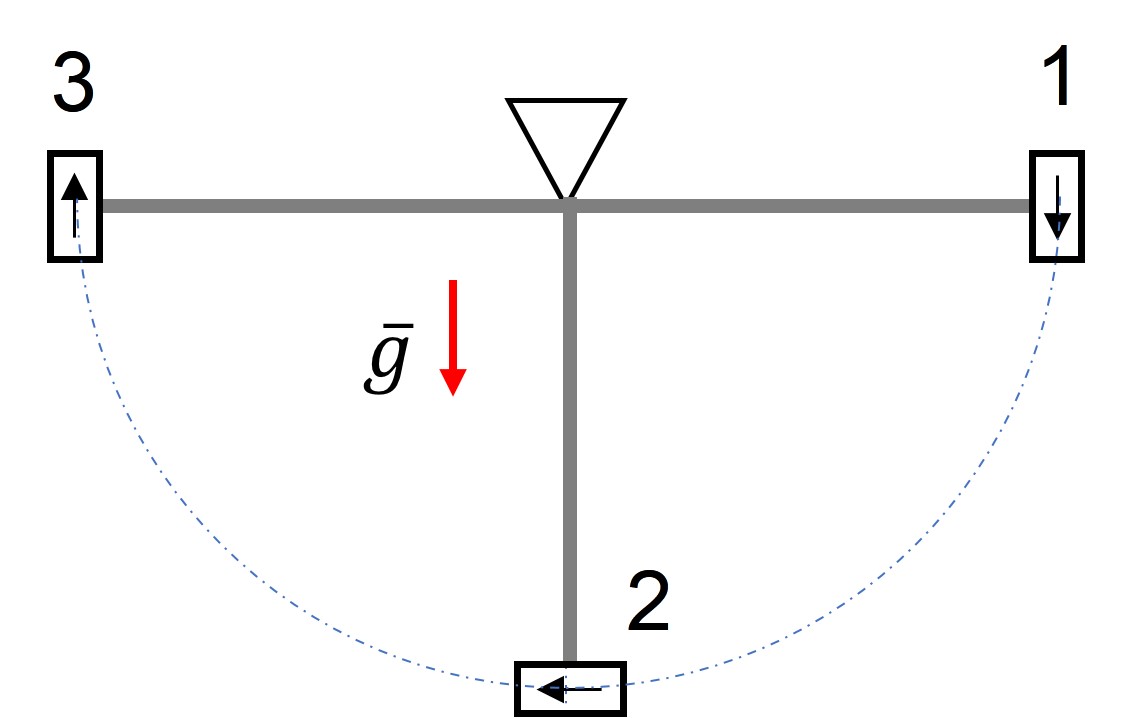
Rainer W. schrieb: > Natürlich ist eine Kraft nötig, damit dein Sensor ein von Null > verschiedenes Signal ausgeben kann. > So ein MEMS misst die Differenz der auf Gehäuse und interne Probemasse > wirkenden Beschleunigungen, d.h. nur Kräfte die in Richtung des Fadens > wirken, führen zu einem Signal. In X und Z nimmt der Faden keine Kraft > auf, also wirken in diesen Komponenten keine Zwangskräfte auf das > Gehäuse und der Sensor kann in diesen beiden Komponenten auch nichts > messen. Deine minimale Restschwingung deutet auf einen Restfehler bei > der Ausrichtung hin. Mit Verlaub, das ist Bullshit ;-) Der MEMS-Sensor zeigt eine Mischung aus der statischen (Erd)Beschleunigung und der „dynamischen“ Beschleunigung der Pendelbewegung. Was ich die ganze Zeit meine; Es muß einen statischen Offset in der x-Achse geben welcher sich mit dem Drehwinkel des Pendels ändert. In Position 1 zeigt der Sensor für die x-Achse +1g, in Position 2 0g und in Position 3 -1g an. Lasse ich das Pendel schwingen, wird dieser Messwert der Tangentialbeschleunigung überlagert. Genau das vermisse ich in der gezeigten Messung.
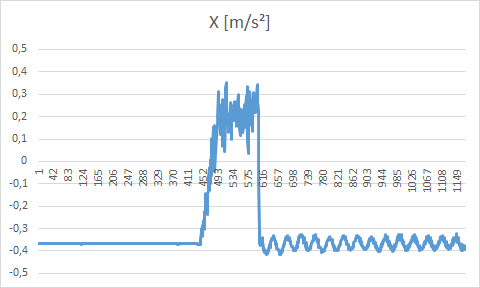
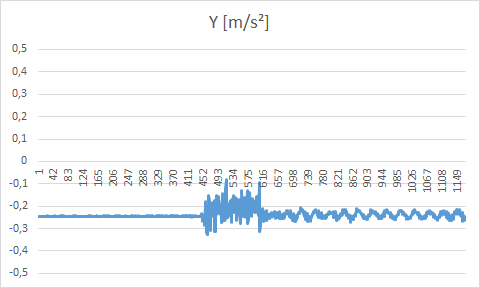
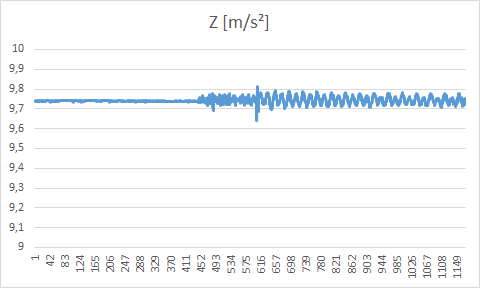
Hier nochmal die Schwingung aus dem ersten Beitrag ohne Subtraktion der Offsets in den Achsen. Das hier sind die Werte out-of-the-Sensor, lediglich mit 9,81 multipliziert. Die y-Achsen decken immer einen Bereich von 1m/s² ab.
Joe G. schrieb: > In Position 1 zeigt der Sensor für die x-Achse +1g, Aber nur, so lange man den Sensor fest hält! Die Masse im sensor drückt ab mit 1g auf das Gehäuse des Sensors. Lädst man los, dann erfahren Gehäuse und Masse im Gehäuse die gleiche Erdbeschleunigung und der Messer ist 0! Man muss die Erdbeschleunigung und den Messwert Überlagern um die "tatsächliche Beschleunigung" zu haben. Und der Anteil der Erdbeschleunigung an der jeweiligen Komponente des Sensormessewertes ist eine Funktion der Auslenkung!
Henrik V. schrieb: > Um aus der sinusförmigen Schwingbeschleunigung a mit Frequenz f auf den > Schwingamplitude s zu kommen, kann man einfach s = a/ (2*Pi*f)² > rechnen. > Also (doppelte) Integration im Frequnzbereich statt im Zeitbereich. also s= 0,04 m/s² / (2*Pi*0,5Hz)² = 4mm Wieder um den Faktor 10 falsch.
Michael P. schrieb: > Ok ich werde 2-3 Versuche machen, und die Z-Achse (sorry für die > Verwirrung) die Richtung Faden zeigt etwas variieren. Ändere doch mal die Versuchsanordnung, nimm 2 Fixpunkte und ein Brett dazwischen, sodass der Sensor keine Verdrehung mehr erfährt.
Re D. schrieb: > Aber nur, so lange man den Sensor fest hält! Die Masse im sensor drückt > ab mit 1g auf das Gehäuse des Sensors. Lädst man los, dann erfahren > Gehäuse und Masse im Gehäuse die gleiche Erdbeschleunigung und der > Messer ist 0! Korrekt! Diesen Punkt habe ich übersehen. Allerdings trifft das nur auf den freien Fall zu. Hier haben wir ja eine Zwangsbewegung. Besonders deutlich wird das bei der "Aufwärtsbewegung" des Pendels.
Joe G. schrieb: > Mit Verlaub, das ist Bullshit ;-) Das glaube ich nicht, solange du keine Messungen zeigst, die das Gegenteil beweisen ;-) Der Sensor kennt nur die Verformung zwischen seinem Gehäuse und der internen Probemasse. Alles andere findet jenseits seinen Horizontes statt. Nur Kräfte, die von außen auf sein Gehäuse wirken (also in Fadenrichtung jetzt richtig Z), führen zu Messwerten ungleich 0 (abgesehen von der schon genannten Querempfindlichkeit).
Jetzt hat mich der theoretische Zusammenhang tatsächlich interessiert. Wir haben ja eine Überlagerung der Tangentialbeschleunigung eines Pendels und der festen Erdbeschleunigung im Inertialsystem. Beide werden bei der Bewegung überlagert da es eine Zwangsbewegung ist. Für kleine Winkelausschläge des Pendels heben sich beide Beschleunigungen gerade auf (siehe Rechnung und Messung). Für große Winkelausschläge (+-40 Grad) sollte der Unterschied messbar sein.
Rainer W. schrieb: > Nur Kräfte, die von außen auf sein Gehäuse wirken (also in > Fadenrichtung jetzt richtig Z), führen zu Messwerten ungleich 0 Drei Fälle: 1. Das Pendel ist um 90° ausgelenkt. Seine Geschwindigkeit wird mit 1g Richtung Boden beschleunigt. Der Faden schlottert, auf das Gehäuse wirken keine Kräfte (es befindet sich also im freien Fall), der Sensor misst in allen Achsen idealerweise 0. 2. Das Pendel durchquert dir 0°-Position. Seine Geschwindigkeit ist konstant. Auf das Gehäuse wirkt nur der Zug des Fadens, der Gravitation und Zentrifugpetalkraft entgegenwirkt. Der Sensor misst idealerweise in X- und Y-Richtung 0, in Z-Richtung ein wenig mehr als 1g. 3. Das Pendel ist um 45° ausgelenkt und, sagen wir, auf dem Rückweg. Die Gravitation beschleunigt die Geschwindigkeit des Pendel mit 0.7g schräg nach unten in X-Richtung. Der Faden kompensiert wieder den Z-Anteil der Gravitation (auch 0.7g) und die Zentrikraft. Der Sensor misst idealerweise in Z-Richtung ein wenig mehr als 0.7g, in Y-Richtung 0. Und du sagst, in Fall 3 misst ein idealer Sensor auch in X-Richtung nur 0, weil er in X-Richtung "frei fällt" und nur in Z-Richtung gehalten wird? Mmh. Scheint mir logisch. LG, Sebastian
Joe G. schrieb: > Hier haben wir ja eine Zwangsbewegung. Genau. Aber nur aufgrund des Fadens ist es kein freier Fall. D.h. die einzige Kraft, die auf das Sensorgehäuse wirkt und nicht genau so auf die Masse darin, ist die Kraft des Fadens, also die Zentrifugalkraft, die ja von der Winkelgeschwindigkeit abhängt. In Z-Richtung müsste man also eine Veränderung messen, nicht in x.
Np R. schrieb: > Joe G. schrieb: >> Hier haben wir ja eine Zwangsbewegung. > > Genau. Aber nur aufgrund des Fadens ist es kein freier Fall. > D.h. die einzige Kraft, die auf das Sensorgehäuse wirkt und *nicht* > genau so auf die Masse darin, ist die Kraft des Fadens, also die > Zentrifugalkraft, die ja von der Winkelgeschwindigkeit abhängt. Sehe ich genauso, das habe ich ja auch ganz am Anfang des Threads schon geschrieben. Immer wieder faszinierend wie kompliziert und verwirrend dermaßen triviale Systeme sein können.
Np R. schrieb: > D.h. die einzige Kraft, die auf das Sensorgehäuse wirkt und nicht > genau so auf die Masse darin, ist die Kraft des Fadens, also die > Zentrifugalkraft ... Dann existiert wohl die Tangentialbeschleunigung nicht ;-)
Joe G. schrieb: > Np R. schrieb: >> D.h. die einzige Kraft, die auf das Sensorgehäuse wirkt und nicht >> genau so auf die Masse darin, ist die Kraft des Fadens, also die >> Zentrifugalkraft ... > > Dann existiert wohl die Tangentialbeschleunigung nicht ;-) Im Bezugssystem des Sensors tut sie das wohl tatsächlich nicht, oder? Wo soll sie auch herkommen? Die einzige Kraft, die da wirkt, ist die des Fadens, die immer senkrecht zur Bewegungsrichtung steht. Die maximale Beschleunigung die der Sensor misst, sollte also die durch die Zentrifugalkraft bei einer Geschwindigkeit von sqrt(2 g h) = 0.16 m/s mit h = 1.25 mm sein, und das sind v²/r = 0.025 m/s². Das passt auch ungefähr wenn ich mir die Messwerte oben anschaue.
Sebastian W. schrieb: > Das Pendel ist um 90° ausgelenkt. Seine Geschwindigkeit wird mit 1g > Richtung Boden beschleunigt. Der Faden schlottert, auf das Gehäuse > wirken keine Kräfte (es befindet sich also im freien Fall), Wie schon gesagt, gilt das nur in dem Fall, in dem das Pendel das Maximum der Auslenkung bei 90° erreicht. Und selbst in dem Fall gilt die Annahme des freien Falls nur für den Moment der 90° Auslenkung. Ausserdem wird das Pendel beschleunigt, nicht dessen Geschwindigkeit. Sebastian W. schrieb: > Das Pendel durchquert dir 0°-Position. Seine Geschwindigkeit ist > konstant. Auch nur für den Moment der 0° Auslenkung. Das sich in einem Moment nichts ändert, darüber brauchen wir wohl nicht sprechen. Sebastian W. schrieb: > Die Gravitation beschleunigt die Geschwindigkeit des Pendel mit 0.7g Die Gravitation beschleunigt das Pendel, daher ändert sich dessen Geschwindigkeit. Präzision, Sebastian, Präzision ;-)
J. T. schrieb: > Auch nur für den Moment der 0° Auslenkung. Das sich in einem Moment > nichts ändert, darüber brauchen wir wohl nicht sprechen. Naja, für diesen Moment und seine lineare Näherung. Erst quadratisch ändert sich etwas. Man muss also schon darüber nachdenken, was für diese Situation gilt, denn es gibt sie näherungsweise eine ganze Weile lang. Der ganze "sinusförmige Schwingung"-Kram ist übrigens auch genau so eine Näherung, die eigentlich nur für den Moment der 0°-Auslenkung gilt...
Angehängte Dateien:
-

Pendel.jpg
38 KB
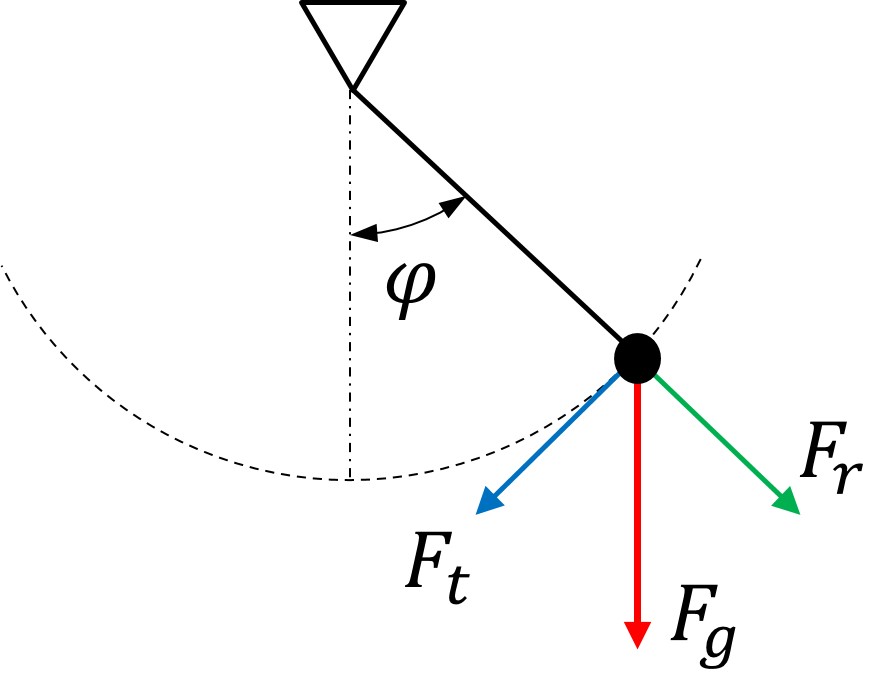
Wie stellt man in der Mechanik eine Bewegungsgleichung auf? Eine Möglichkeit besteht darin, eine Bewegung „einzufrieren“ und alle äußeren Kräfte und Momente anzutragen. Im Weiteren hilft uns dann der Impuls- und Drehimpulssatz. Bei einem Pendel haben wir nur eine einzige Kraft, die Gewichtskraft. Für eine Bewegung zerlegen wir diesen Vektor in zwei Komponenten, die Radial- und die Tangentialkraft. Der Drehimpulssatz liefert uns dann die Bewegungsgleichung. Sollte keine Tangentialkraft (Tangentialbeschleunigung existieren), würde es auch keine Bewegung geben.
Joe G. schrieb: > Sollte keine > Tangentialkraft (Tangentialbeschleunigung existieren), würde es auch > keine Bewegung geben. Wenn ich den Sensor vom Stuhl werfe, fällt er runter. Sollte es keine Kraft geben, die ihn nach unten zieht, würde er nicht runter fallen. Trotzdem zeigt der Sensor in dieser Situation eine Beschleunigung von (0, 0, 0) an. Dieses Modell ist also nicht geeignet, um über das Problem nachzudenken. Kräfte sind Hilfsgrößen, über deren "Existenz" sich trefflich streiten lässt. Die objektiv beantwortbare Frage ist, ob im Bezugssystem des Sensors eine entsprechende Beschleunigung messbar ist, oder nicht. Das Kräftediagramm im Bezugssystem des Zimmers wird dabei nur indirekt nützlich sein.
Joe G. schrieb: > Dann existiert wohl die Tangentialbeschleunigung nicht ;-) Die wirkt aber auf beide: das Gehäuse und die Masse. Den MEMS-Sensor interessiert doch nicht, welche Kräfte wirken - sondern nur welche Kräfte auf die Masse im Sensor anders wirken als aufs Gehäuse. Wenn der Sensor im freien Fall zur Erde fällt, wirkt ja auch ganz offensichtlich eine Kraft. Und Beschleunigung gibt's auch. Ob er aber gerade senkrecht herunter fällt oder in einer Wurfparabel oder etwa um die Erde kreist, weiß er doch nicht.
Np R. schrieb: > Die wirkt aber auf beide: das Gehäuse und die Masse. Diese Sichtweise gefällt mir sehr gut. Damit ist eigentlich leicht zu argumentieren, warum man nur die Zentrifugalkraft sehen sollte: die einzige Kraft, die "von außen" nur auf das Gehäuse des Sensors wirkt, ist die, die durch den Faden verursacht wird. Und die kann nur in Richtung des Aufhängepunkts wirken, also senkrecht zur Bewegungsrichtung.
Joe G. schrieb: > Wie stellt man in der Mechanik eine Bewegungsgleichung auf? Das müsstest Du jetzt zweimal machen: Einmal für das Gehäuse des Sensors, und einmal für die Masse darin. Und auf wundersame Weise bekommst Du dieselben Tangentialkräfte und dieselben Radialkräfte - nur dass die Radialkraft bei dem Gehäuse der Zug am Faden und bei der Masse die Wirkung auf den Sensor ist.
Np R. schrieb: > Wenn der Sensor im freien Fall zur Erde fällt, wirkt ja auch ganz > offensichtlich eine Kraft. Und Beschleunigung gibt's auch. Ob er aber > gerade senkrecht herunter fällt oder in einer Wurfparabel oder etwa um > die Erde kreist, weiß er doch nicht. Ja, bei einer konstanten Beschleunigung. Bremse mal einen frei fallenden Sensor am Gehäuse ab. Die träge Masse im Inneren des Sensors ändert ihre Lage.
Sven B. schrieb: > Wenn ich den Sensor vom Stuhl werfe, fällt er runter. Sollte es keine > Kraft geben, die ihn nach unten zieht, würde er nicht runter fallen. So ist es. Der Sensor Misst die Kräfte zwischen seiner inneren Masse und dem Gehäuse. Liegt der Sensor ruhig auf dem Tisch, so misst er 1 g in z-Richtung. Wird der um 5° gekippt, misst er sin5° in x-Richtung und cos5° in z- Richtung. Das zeigt ja auch die Messung und ist nicht vernachlässigbar. Wird das Pendel jetzt gehen gelassen, dann beschleunigen Gehäuse und innere Masse die Beschleunigung des Gehäuses und der Masse sind gleich groß und betragen sin(alpha)*g. Es wirkt keine Kraft auf das Gehäuse, sondern es befindet sich im (richtungsgeführten) freien Fall.
Joe G. schrieb: > Ja, bei einer konstanten Beschleunigung. Bremse mal einen frei fallenden > Sensor am Gehäuse ab. Die träge Masse im Inneren des Sensors ändert ihre > Lage. Genau. Und was bremst (oder beschleunigt) den Pendelkopf *in Tangentialrichtung*? Nichts. Es gibt ja nur den Faden, und der ist immer senkrecht zur Bewegungsrichtung.
Sven B. schrieb: > Genau. Und was bremst (oder beschleunigt) den Pendelkopf *in > Tangentialrichtung*? Nichts. Stimmt, er bewegt sich auf einer endlosen Kreisbahn mit konstanter Beschleunigung, ohne an den Enden seine Geschwindigkeit auf null zu bringen und die Bewegungsrichtung umzukehren. Deswegen nennt man es ja auch Pendel 😉
Joe G. schrieb: > Sven B. schrieb: >> Genau. Und was bremst (oder beschleunigt) den Pendelkopf in >> Tangentialrichtung? Nichts. > > Stimmt, er bewegt sich auf einer endlosen Kreisbahn mit konstanter > Beschleunigung, ohne an den Enden seine Geschwindigkeit auf null zu > bringen und die Bewegungsrichtung umzukehren. Deswegen nennt man es ja > auch Pendel 😉 Die Masse im Sensor und das Gehäuse bremsen im Pendel aber eben um genau den gleichen Betrag, weil die Schwerkraft auf beide Körper gleich wirkt, somit ergeben sich keine Differenzgeschwindigkeiten und keine relative Beschleunigung.
Joe G. schrieb: > Sven B. schrieb: >> Genau. Und was bremst (oder beschleunigt) den Pendelkopf *in >> Tangentialrichtung*? Nichts. > > Stimmt, er bewegt sich auf einer endlosen Kreisbahn mit konstanter > Beschleunigung, ohne an den Enden seine Geschwindigkeit auf null zu > bringen und die Bewegungsrichtung umzukehren. Deswegen nennt man es ja > auch Pendel 😉 Das Bremsen und Beschleunigen in Tangentialrichtung ist eine Überlagerung aus freiem Fall und der Beschleunigung durch den Faden senkrecht zur Bewegungsrichtung. Nur letzteres kann der Sensor messen, in Bewegungsrichtung misst er null. So meine Arbeitshypothese. ;)
Ein Beschleunigungssensor der in einem Gehäuse sitzt das im freien Fall ist wird genau 0 messen. Genauso misst ein Beschleunigungssensor der in einem frei schwingenden Pendel sitzt, mit der X-Achse tangential, auch nichts (in dieser X-Achse). Die Kraft durch die Beschleunigung und durch die Gravitation heben sich auf. Die "Messmasse" im Sensor schwebt quasi (bezüglich tangentialer Komponente). Sonst würden Versuche zur Schwerelosigkeit in Parabelflügen auch nicht funktionieren. In einem solchen Flug ändert sich auch die Geschwindigkeit der mitfliegenden von der "Erde" aus gesehen dauernd, aber sie selbst sind im Intertialsystem Flugzeug bewegungs und schwerelos.
Re D. schrieb: > Die Masse im Sensor und das Gehäuse bremsen im Pendel aber eben um genau > den gleichen Betrag, weil die Schwerkraft ... Die Tangentialbeschleunigung auf die Pendelmasse und die Sensormasse sind gleich. Da sich aber Sensormasse und Pendelmasse unterscheiden, sind die wirkenden Kräfte nicht gleich. Genau das messe ich dann auch.
Joe G. schrieb: > Re D. schrieb: >> Die Masse im Sensor und das Gehäuse bremsen im Pendel aber eben um genau >> den gleichen Betrag, weil die Schwerkraft ... > > Die Tangentialbeschleunigung auf die Pendelmasse und die Sensormasse > sind gleich. Da sich aber Sensormasse und Pendelmasse unterscheiden, > sind die wirkenden Kräfte nicht gleich. Genau das messe ich dann auch. Kapier' ich nicht bzw. halte ich für unsinnig. Dieser Typ von Sensor misst Beschleunigungen, nicht Kräfte.
Joe G. schrieb: > Die Tangentialbeschleunigung auf die Pendelmasse und die Sensormasse > sind gleich. Da sich aber Sensormasse und Pendelmasse unterscheiden, > sind die wirkenden Kräfte nicht gleich. Genau das messe ich dann auch. Jetzt ruderst Du aber. Wie ist das bei einem im Schwerefeld fallenden Sensor? Da misst Du also den Unterschied zwischen der Sensormasse und der Pendelmasse? Oder zwischen Sensorgehäuse und Masse im Sensor? Irgendwann sollte man vom Kamel absteigen. Oder es wieder aus der Wüste lenken.
Np R. schrieb: >> Wie stellt man in der Mechanik eine Bewegungsgleichung auf? > > Das müsstest Du jetzt zweimal machen: Einmal für das Gehäuse des > Sensors, und einmal für die Masse darin. Ich meinte das ernst. Mach die Rechnung zweimal und überlege Dir, welche Kraft eigentlich von der Mimik des Sensors gemessen wird. Es geht um die Differenz zwischen Gehäuse und der trägen Masse im Gehäuse.
J. T. schrieb: > Präzision, Sebastian, Präzision ;-) Autsch. Hab ich das verdient? Ja, hab ich wohl, hohes Ross und so ... Michael P. schrieb: > Die Z-Achse zeigt natürlich hinauf (weg vom Erdmittelpunkt). Die Y-Achse > zeigt Richtung Betrachter. Die Grafik hier ist richtig. Ist deine Pendelaufhängung ein Faden oder starr? Du sprachst weiter oben von einem Blumentopf. Eine starre Aufhängung könnte Bremskräfte an der Achse als tangentiale Bremskraft an das Sensorgehäuse weiterleiten, die dann u.U. in X-Achse meßbar würden ... LG, Sebastian
Joe G. schrieb: > Bremse mal einen frei fallenden > Sensor am Gehäuse ab. Die träge Masse im Inneren des Sensors ändert ihre > Lage. Genau! Aber nur dann. Wenn das Pendel seinen Umkehrpunkt erreicht, wirken zwar Kräfte auf das Pendel und das Pendel erfährt auch eine Beschleunigung, aber - es sind dieselben Kräfte und dieselbe Beschleunigung, die auf Gehäuse und Masse wirken. Der Sensor misst ja nicht einfach irgendwelche Kräfte. Sondern die zwischen Gehäuse und Masse.
Np R. schrieb: > Das müsstest Du jetzt zweimal machen: Einmal für das Gehäuse des > Sensors, und einmal für die Masse darin. Der Sensor selbst hängt am Faden des Pendels, die "Sensormasse" im Sensor "hängt" an einer Feder am Sensor(gehäuse). Wirkt nun eine Kraft (ausschließlich) auf das Gehäuse, wird das Gehäuse beginnen, sich zu bewegen, die Sensormasse bleibt aufgrund der Trägheit erstmal stehen. Daher wird nun die Feder komprimiert und fängt an, eine Kraft auf die Sensormasse zu erzeugen. Im freien Fall wirkt die Anziehungskraft aber auf Gehäuse und Sensormasse gleichermaßen, daher kann sich die Sensormasse mit dem Gehäuse mitbewegen, ohne dass die Masse von der Feder überzeugt werden müsste, sich zu bewegen.
Sebastian W. schrieb: > Autsch. Hab ich das verdient? Ja, hab ich wohl, hohes Ross und so ... :D Immerhin trägst du es mit Fassung wenn man dich auf Ungenauigkeiten hinweist, nicht so wie andere Leute hier im Forum ;-) Von daher hast du trotz nem kleinen Fehlerchen alles richtig gemacht 👍
Angehängte Dateien:
-

Radial.png
110 KB -

Schwingung.png
20 KB -

Tangential.png
130 KB -

Zahlen.png
22 KB -

Vergeleich_Messwerte.png
130 KB
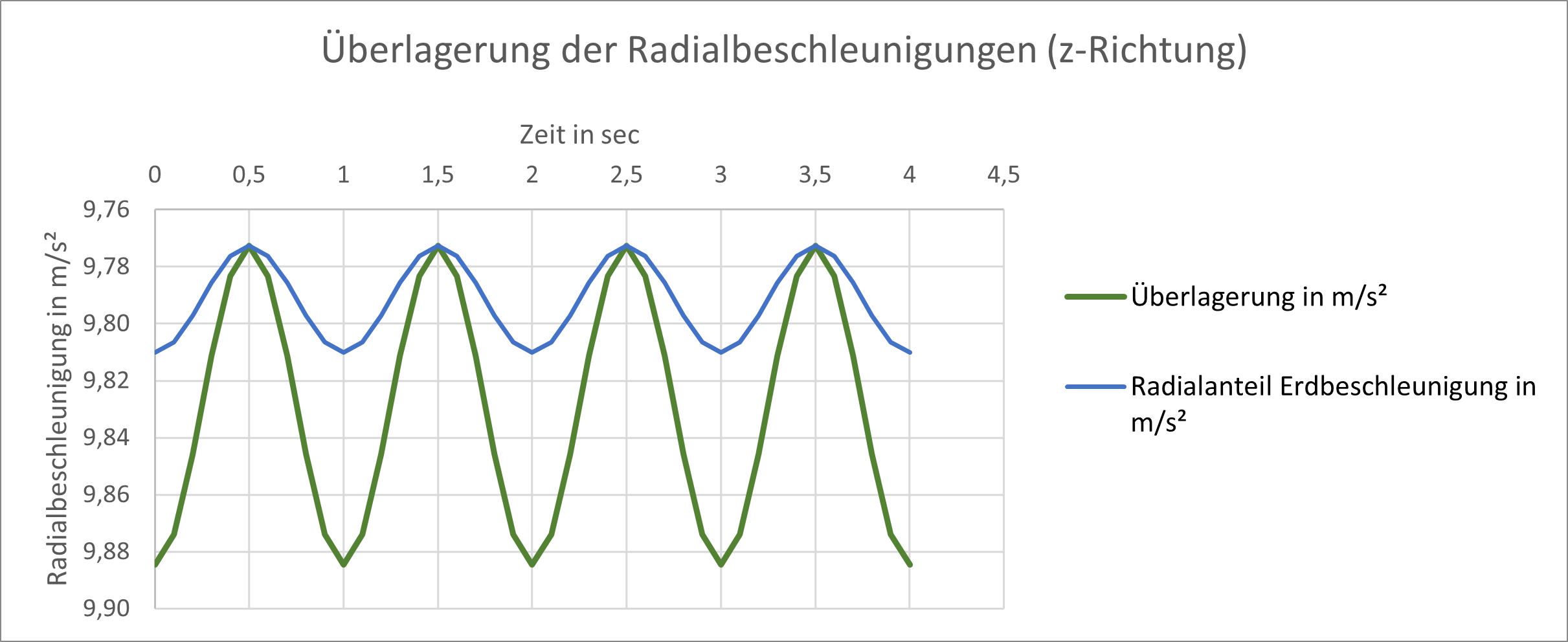
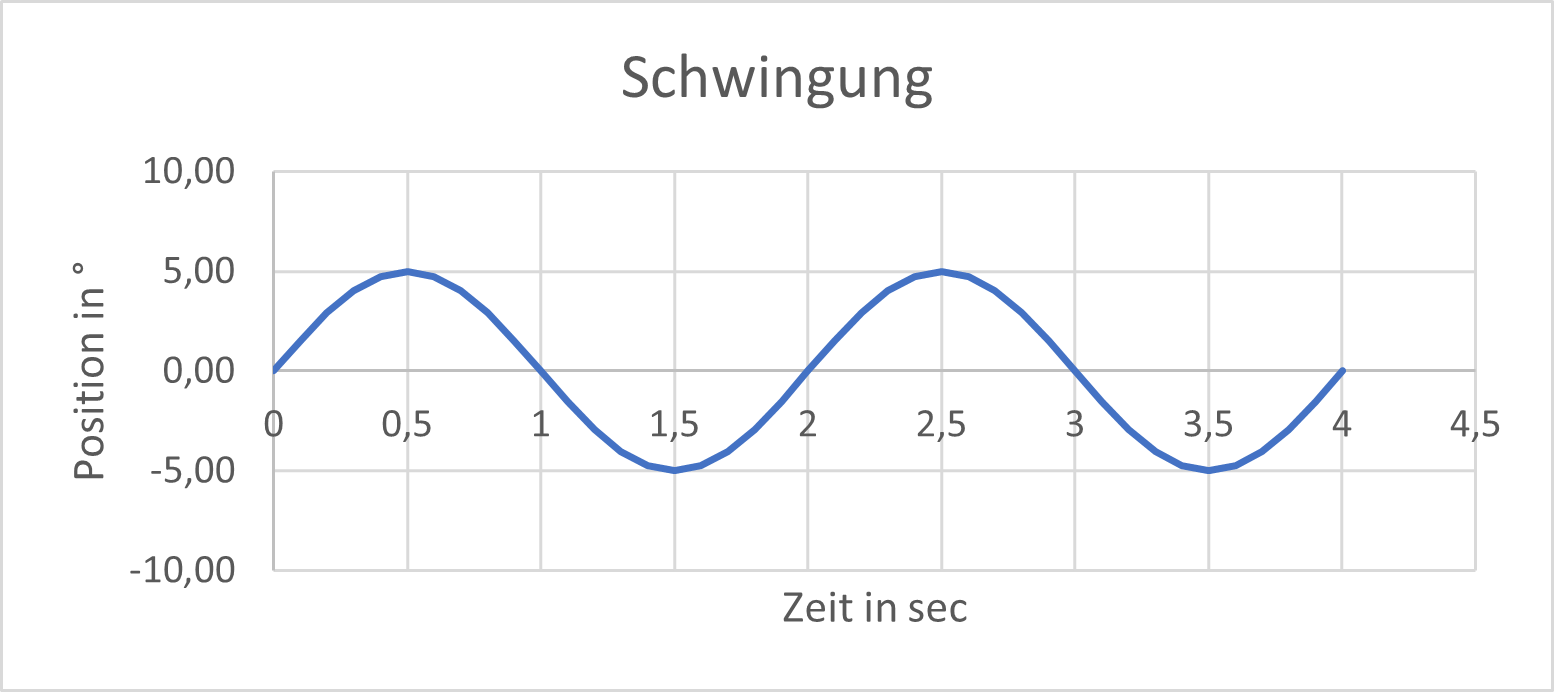
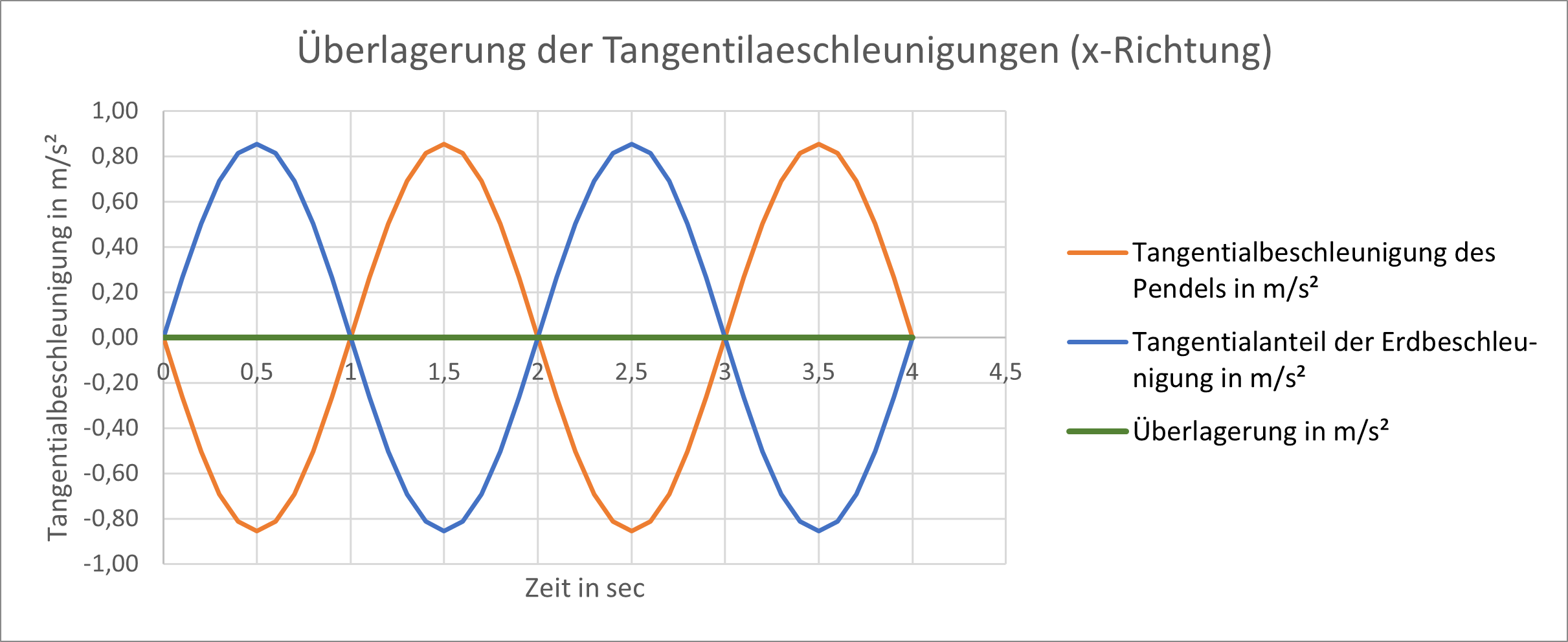
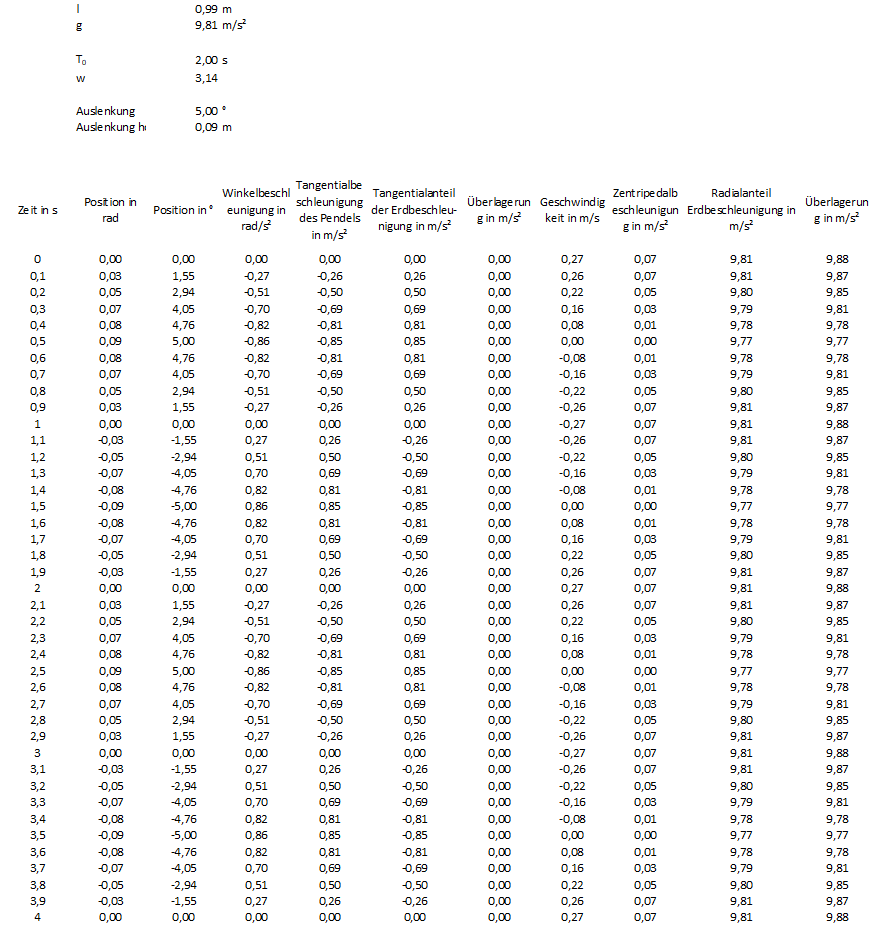
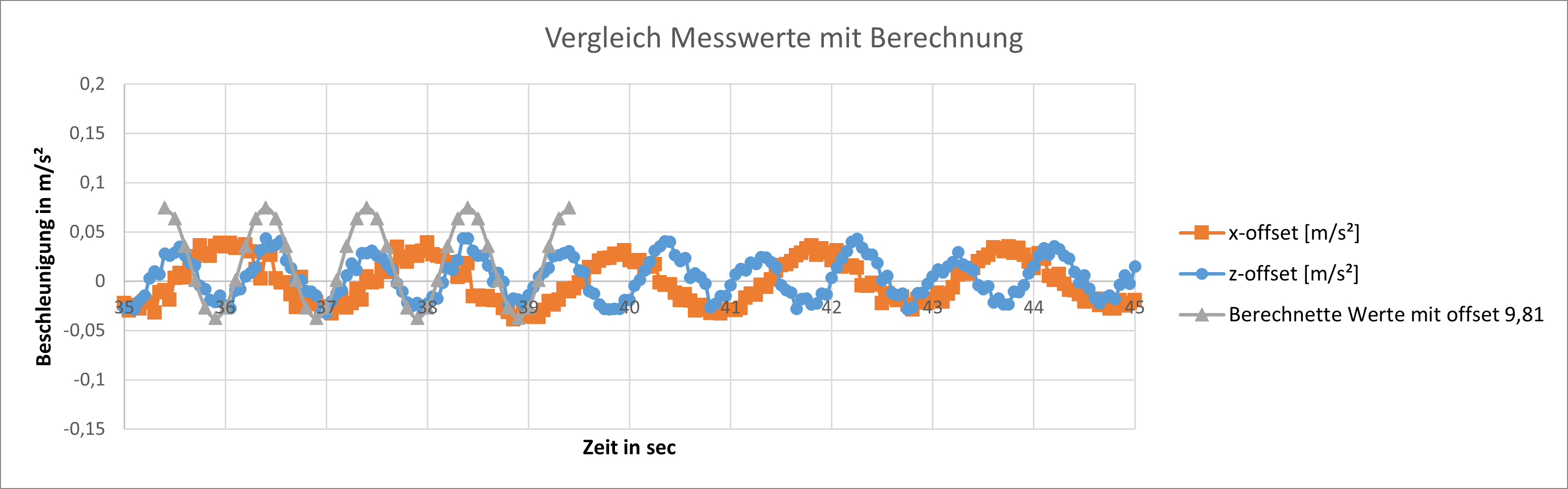
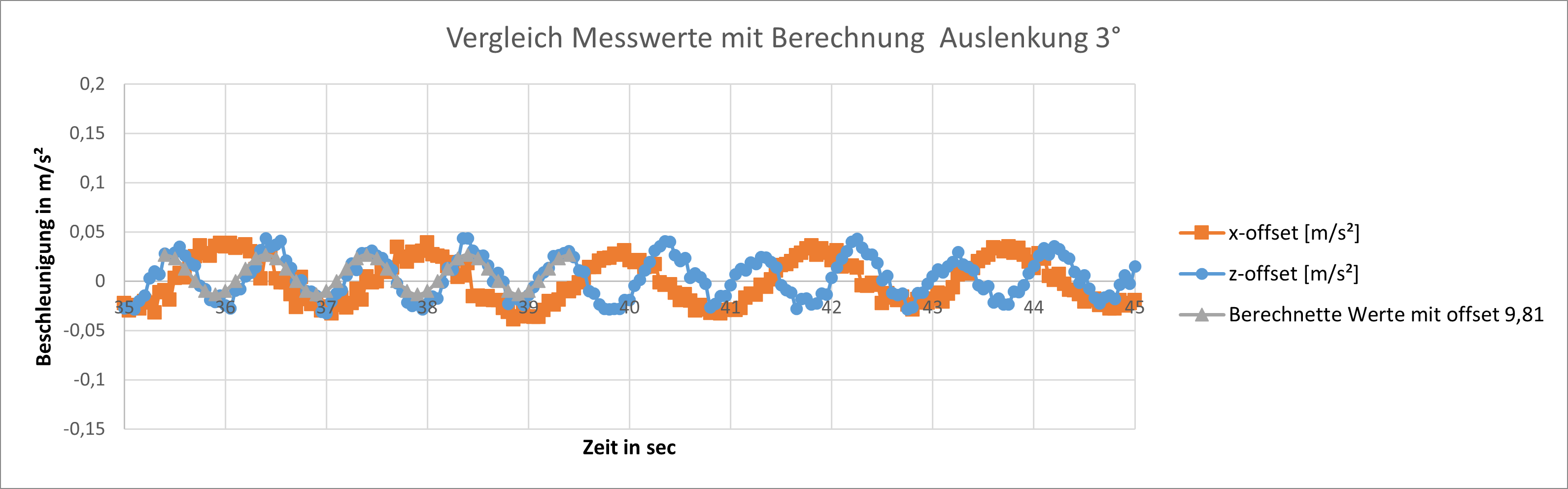
Anbei mal die Aussplittungen, der verschiedenen Anteile und was der Sensor in der Überlagerung messen sollte. Fakt ist und bleibt, dass sich die Tangentialbeschleunigung mit der Erdbeschleunigung entsprechend der Sensorneigung überlagert und somit nicht messbar ist. Die Radialbeschleunigung in den Messwerten zeigt das gleiche Muster wie die Berechnung und auch die Größenordnung passt.
Angehängte Dateien:
p.s., wenn man mit 5 cm Auslenkung und nicht mit 5° rechnet, passt es besser ;)
cool Danke! Kannst du das Spreadsheet bitte auch teilen, damit ich das besser nachvollziehen kann?
Ich hab das auch mal durchgerechnet und es ist so: - der Sensor misst die Beschleunigung im körperfesten Koordinatensystem. - der Sensor misst auch die Fallbeschleunigung Dadurch ergibt sich folgendes Problem: Um die reine Beschleunigung zu berechnen muss man die Fallbeschleunigung aus den Sensormesswerten wegsubtrahieren. Jedoch rotiert/dreht das Koordinatensystem des Sensors durch die Pendelbewegung. Dadurch lässt sich die Fallbeschleunigung nicht ohne weiteres heraussubtrahieren, denn der Vektor der Fallbeschleunigung hat jetzt mehrere Komponenten (x,y,z) die vom Pendelausschlag abhängen. Um die Fallbeschleunigung herauszurechnen müsste der Ausschlagwinkel bekannt sein, der ja gerade bestimmt werden soll... Für die Messung des Ausschlagwinkels wäre ein Gyroskop geeignet.
Sven B. schrieb: > Dieser Typ von Sensor misst Beschleunigungen, nicht Kräfte. Nein, bei Beschleunigung des Sensors treten Kräfte zwischen Gehäuse und innerer Probemasse auf. Genau diese Kräfte werden gemessen. Zusammen mit der trägen Masse der Probemasse ergibt sich daraus der Wert für die Beschleunigung.
Lisa P. schrieb: > Um die Fallbeschleunigung herauszurechnen > müsste der Ausschlagwinkel bekannt sein, der ja gerade bestimmt werden > soll... Wie oben gezeigt, kann man den maximalen Ausschlagwinkel aus den Messwerten (Periodendauer und Amplitude (x²+z²)^0,5) ableiten. Den Rest kann man ausrechnen.
Re D. schrieb: > Lisa P. schrieb: >> Um die Fallbeschleunigung herauszurechnen >> müsste der Ausschlagwinkel bekannt sein, der ja gerade bestimmt werden >> soll... > > Wie oben gezeigt, kann man den maximalen Ausschlagwinkel aus den > Messwerten (Periodendauer und Amplitude (x²+z²)^0,5) ableiten. Den Rest > kann man ausrechnen. Es geht nicht um den maximalen Ausschlagwinkel. Es geht um den Ausschlagwinkel zum aktuellen Zeitpunkt. Dieser ließe sich schätzen indem man die Differentialgleichung der Bewegung des Pendels löst und die Anfangsbedingung einfließen lässt. Aber, wofür dann die Messung?
Lisa P. schrieb: > - der Sensor misst die Beschleunigung im körperfesten Koordinatensystem. > - der Sensor misst auch die Fallbeschleunigung Weder noch. Der Sensor misst keine Beschleunigung. Wie sollte er das machen? Der Sensor misst die Differenz zweier Kraftvektoren: zwischen dem, der auf das Gehäuse wirkt, und dem, der auf die träge Masse im Inneren des Sensors wirkt. Durch diese resultierende Kraft wird die träge Masse relativ zum Bezugssystem (Gehäuse) ausgelenkt.
Angehängte Dateien:
-

2024-03-27_MPU6050.png
31 KB

>Weder noch. Der Sensor misst keine Beschleunigung. Wie sollte er das >machen? Echt jetzt? Das musst Du den Sensorherstellern mal sagen. Die verkaufen die Dinger doch tatsächlich mit der Bezeichnung Beschleunigungssensor.
Christoph M. schrieb: > Echt jetzt? Das musst Du den Sensorherstellern mal sagen. Die verkaufen > die Dinger doch tatsächlich mit der Bezeichnung Beschleunigungssensor. Ja sowas, und wie misst er die Beschleunigung auf physikalischer Ebene? Hat er einen GPS-Chip, bestimmt Position und Zeit oder doch ehr so: "In den letzten Jahren haben miniaturisierte Beschleunigungssensoren zunehmend Bedeutung erlangt. Diese sind mikro-elektro-mechanische Systeme (MEMS) und werden meist aus Silicium hergestellt. Diese Sensoren sind Feder-Masse-Systeme, bei denen die „Federn“ nur wenige μm breite Silicium-Stege sind und auch die Masse aus Silicium hergestellt ist. Durch die Auslenkung bei Beschleunigung kann zwischen dem gefedert aufgehängten Teil und einer festen Bezugselektrode eine Änderung der elektrischen Kapazität gemessen werden." https://de.wikipedia.org/wiki/Beschleunigungssensor
Christoph M. schrieb: > Echt jetzt? Ja, echt jetzt. Wenn Du die Masse kennst und die Kraft, hast Du die Beschleunigung. Manche Dinge misst man eben indirekt. Das macht man bei vielen Größen so, die einer direkten Messung nicht zugänglich sind. Wenn man schlau ist, misst man etwas Anderes und rechnet ein bisschen. Wenn man noch schlauer (oder fauler) ist, kalibriert man einfach. Ich wette, dass die Sensor-Hersteller das genau so machen.
Lisa P. schrieb: > Es geht um den Ausschlagwinkel zum aktuellen Zeitpunkt. Dieser ließe > sich schätzen indem man die Differentialgleichung der Bewegung des > Pendels löst und die Anfangsbedingung einfließen lässt. Nichts anderes habe ich geschrieben. Wobei es auch durch Integration der Messwerte geht. Mit einem Beschleunigungssensor kann man die Weggrößen nie ohne die Vorgabe von Randbedingungen messen, das ist trivial. Lisa P. schrieb: > Aber, wofür dann die Messung? Hast du doch gelesen, es war ein Versuchsaufbau des TO und dient dem Erkenntnisgewinn. Nennt sich Wissenschaft.
Christoph M. schrieb: > Die verkaufen > die Dinger doch tatsächlich mit der Bezeichnung Beschleunigungssensor. Ja, diese Hersteller. Die verkaufen ja andere Dinge auch mit der Bezeichnung "Thermometer". Dabei misst man damit nur die Höhe einer Alkohol- oder Quecksilbersäule.
Christoph M. schrieb: > Echt jetzt? Das musst Du den Sensorherstellern mal sagen. Die verkaufen > die Dinger doch tatsächlich mit der Bezeichnung Beschleunigungssensor. Geh einfach einmal gut 336 Jahre zurück. Da hat ein Herr Newton die Grundlagen für die verwendete Messmethode gelegt. https://de.wikipedia.org/wiki/Newtonsche_Gesetze
Rainer W. schrieb: > Geh einfach einmal gut 336 Jahre zurück. Da hat ein Herr Newton die > Grundlagen für die verwendete Messmethode gelegt. > https://de.wikipedia.org/wiki/Newtonsche_Gesetze Strikt nach Newton sollte ein "wahrer Beschleunigungssensor" ja gerade umgekehrt anzeigen. Liegt er auf dem Boden, bewegt er sich nicht und beschleunigt daher noch weniger. Sollte also 0 ausgeben....wobei keine Bewegung ist 0 Bewegung, also wenn die Beschleunigung noch weniger ist, würd das arme Ding bremsen. Daher besser "und beschleunigt daher auch nicht" Im freien Fall wird er pro Sekunde um 9.81m/s schneller. Er beschleunigt also und sollte 9.81m/s^2 ausgeben. Das kann schon ganz schön verwirrend sein alles :D
J. T. schrieb: > Liegt er auf dem Boden, bewegt er sich nicht und > beschleunigt daher noch weniger. J. T. schrieb: > Im freien Fall wird er pro Sekunde um 9.81m/s schneller. Er beschleunigt > also und sollte 9.81m/s^2 ausgeben. > > Das kann schon ganz schön verwirrend sein alles :D Ja, du hast bewiesen, dass du es nicht verstanden hast.
Re D. schrieb: > Ja, du hast bewiesen, dass du es nicht verstanden hast. Evtl solltest du deinen Ironiedetektor nachjustieren lassen.
J. T. schrieb: > Re D. schrieb: >> Ja, du hast bewiesen, dass du es nicht verstanden hast. > > Evtl solltest du deinen Ironiedetektor nachjustieren lassen. Die Aussage ist einfach nur Quatsch. "Ironie" wohl eher eine Ausrede.
Martin S. schrieb: > Die Aussage ist einfach nur Quatsch. Die Aussage ist eine ziemlich exakte, wenn auch scherzhafte, Zusammenfassung des Physikverständnises einiger Diskutanten. Martin S. schrieb: > "Ironie" wohl eher eine Ausrede. Und sowas läuft landläufig halt unter Ironie. J. T. schrieb: > Das kann schon ganz schön verwirrend sein alles :D Oder möchtest du etwa behaupten, dass die Tatsache, das ein Beschleunigungssensor "keine Beschleunigung" anzeigt, obwohl er deutlich sichtbar jede Sekunde 9.81m/s schneller wird, kein Potential für Verwirrung hat?
J. T. schrieb: > Oder möchtest du etwa behaupten, dass die Tatsache, das ein > Beschleunigungssensor "keine Beschleunigung" anzeigt, obwohl er deutlich > sichtbar jede Sekunde 9.81m/s schneller wird, kein Potential für > Verwirrung hat? Anscheinend ist bei Michaels Sensor die Levitation kaputt, und die Gravitation mogelt sich zur Messmasse durch. Reklamieren? LG, Sebastian
@Michael P. Ohne sich jetzt in Grundsatzdiskussionen zu verlieren. Das Ursprungsproblem war doch, dass du aus der Beschleunigung die Bewegung berechnen möchtest. Und zwar nicht von einem Schwerkraftpendel, sondern von dem schwingenden Gebäude. Also nimm nicht das Pendel zum testen, sondern lege den Sensor vor dich auf Karopapier und bewege ihn mit der Hand in X Richtung hin und her. Mit dem Karopapier kannst du die Wegstrecke kontrollieren. Was kommt jetzt heraus wenn du die gemessenen Signale zu einer Geschwindigkeit und dann Wegstrecke aufsummierst? Ist das Ergebnis dann plausibler?
J. T. schrieb: > J. T. schrieb: >> Das kann schon ganz schön verwirrend sein alles :D > > Oder möchtest du etwa behaupten, dass die Tatsache, das ein > Beschleunigungssensor "keine Beschleunigung" anzeigt, obwohl er deutlich > sichtbar jede Sekunde 9.81m/s schneller wird, kein Potential für > Verwirrung hat? Man muss sich halt vergegenwärtigen, dass diese Sensoren keine Beschleunigung, sondern eine Kraft messen (in diesem Fall eben Gravitation und Massenträgheit). Es sind Miniatur-Federwaagen.
Martin S. schrieb: > Es sind Miniatur-Federwaagen. MIR ist das klar. J. T. schrieb: > Wirkt nun eine Kraft (ausschließlich) auf das Gehäuse, wird das Gehäuse > beginnen, sich zu bewegen, die Sensormasse bleibt aufgrund der Trägheit > erstmal stehen. Daher wird nun die Feder komprimiert und fängt an, eine > Kraft auf die Sensormasse zu erzeugen
Angehängte Dateien:
-

tangGandPendel.png
10 KB
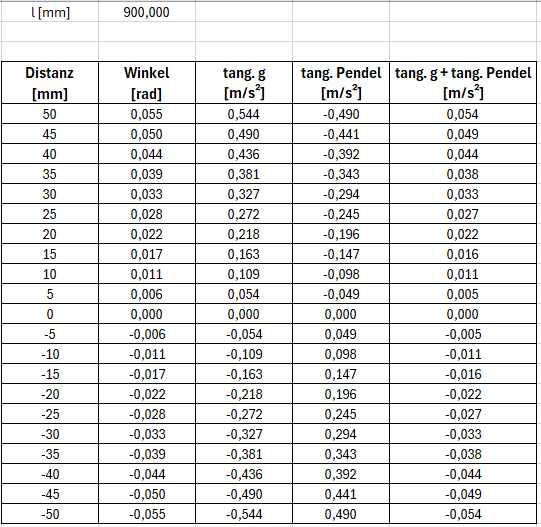
Re D. schrieb: > Fakt ist und bleibt, dass sich die Tangentialbeschleunigung mit der > Erdbeschleunigung entsprechend der Sensorneigung überlagert und somit > nicht messbar ist. Die Radialbeschleunigung in den Messwerten zeigt das > gleiche Muster wie die Berechnung und auch die Größenordnung passt. Vielen Dank für diesen Gedankenanstoß, über den ich gestern nachgedacht habe :-) Da sollten sich ja der tangential Anteil der g Kraft und die Tangentialbeschleunigung des Pendels komplet aufheben. tang. g Anteil = g * sin(alpha) Tangentialbeschleunigung = -g * sin(alpha) * l Bei l=1m kommt da für beide Komponenten exakt das Gleiche raus. Meine Sensoren messen aber bei max/min Ausschlag ca 0,05m/s². Also habe ich nochmal mein Pendel (Hängeplflanze) genauer vermessen und siehe da: die Unterkante des Blumentopfes ist 1m vom Aufhängepunkt entfernt, der Sensor wurde aber am oberen Rand des Blumentopfes angeklebt und ist somit 0,9m vom Aufhängepunkt entfernt. Und rechnet man obige Überlegung nochmal mit 0,9m Pendellänge durch, so überwiegt der tangentiale Erdbeschleunigungsanteil und man erhält im Extrempunkt tatsächlich 0,05m/s² Sehr befriedigend :-) Das möchte ich heute noch mit einer Fadenlänge von 1m und 1,1m verifizieren. Udo S. schrieb: > @Michael P. > > Ohne sich jetzt in Grundsatzdiskussionen zu verlieren. > Das Ursprungsproblem war doch, dass du aus der Beschleunigung die > Bewegung berechnen möchtest. Und zwar nicht von einem Schwerkraftpendel, > sondern von dem schwingenden Gebäude. > > Also nimm nicht das Pendel zum testen, sondern lege den Sensor vor dich > auf Karopapier und bewege ihn mit der Hand in X Richtung hin und her. > Mit dem Karopapier kannst du die Wegstrecke kontrollieren. > Was kommt jetzt heraus wenn du die gemessenen Signale zu einer > Geschwindigkeit und dann Wegstrecke aufsummierst? > > Ist das Ergebnis dann plausibler? Exakt so ist es, ich wollte eigentlich die unplausibel kleinen Sensorausschläge bei meinem 90m Hochhaus verifizieren und habe just das eine Setup gewählt bei dem das eben nicht geht: ein Pendel Wie du im ersten Beitrag sehen kannst (AccelSensorCompare.xlsx), habe ich bereits unterschiedliche Sensoren auf einen Linearschlitten befestigt, diesen dann mit der Hand 70mm in x-Achse bewegt und konnte anhand der Beschleunigungswerte wieder auf ca 70mm Bewegung zurückrechnen. Im Moment habe ich keinen Grund mehr an den Gebäudeschwankungen zu zweifeln, werde aber später hier nochmal die Gebäudebeschleunigungen posten. Sieht nämlich ganz spannend aus
Martin S. (sirnails) 28.03.2024 11:14 >Man muss sich halt vergegenwärtigen, dass diese Sensoren keine >Beschleunigung, sondern eine Kraft messen Meinst du? Dann behaupte ich, sie messen Kapazitäten.
Christoph M. schrieb: > Martin S. (sirnails) > 28.03.2024 11:14 > >>Man muss sich halt vergegenwärtigen, dass diese Sensoren keine >>Beschleunigung, sondern eine Kraft messen > > Meinst du? Dann behaupte ich, sie messen Kapazitäten. Der Kommentar verdient wahrlich einen halben Applaus.
Christoph M. schrieb: > Dann behaupte ich, sie messen Kapazitäten. Mag sein, dass sie die Kapazität messen, um daraus die Kraft abzuleiten.
Christoph M. schrieb: > Meinst du? Dann behaupte ich, sie messen Kapazitäten. Wenn du schon klugscheißen willst, dann doch bitte richtig. Es gibt keine Geräte, die direkt Kapazitäten messen. Ein mögliches Messprinzip wäre die Spannungsänderung nach aufgeflossener Ladung. Also doch nur ein Voltmeter und ein Coulombmeter? Jaja Fragen über Fragen.
J. T. schrieb: > Wenn du schon klugscheißen willst, dann doch bitte richtig. Deswegen gab's nur nen halben Applaus.
J. T. (chaoskind) 28.03.2024 13:33 >Wenn du schon klugscheißen willst, dann doch bitte richtig. Es gibt >keine Geräte, die direkt Kapazitäten messen. Ein mögliches Messprinzip >wäre die Spannungsänderung nach aufgeflossener Ladung. Also doch nur ein >Voltmeter und ein Coulombmeter? Jaja Fragen über Fragen. Oh, die vereinigte Dumpfbackenbewegung fängt schrittweise an, das Funktionsprinzip eines BESCHLEUNIGUNGSSENSORS zu verstehen. Danach war nun aber in diesem Thread überhaupt nicht gefragt.
Michael P. schrieb: > Und rechnet man obige Überlegung > nochmal mit 0,9m Pendellänge durch, so überwiegt der tangentiale > Erdbeschleunigungsanteil und man erhält im Extrempunkt tatsächlich > 0,05m/s² > Sehr befriedigend :-) Interessante Erkenntnis, große Denker wären sicher direkt drauf gekommen. Im Prinzip kanns du den Sensor an den Aufhängepunkt montieren und somit die Tangentialbeschleunigung aus der Pendelbewegung eliminieren und direkt den Ausschlagwinkel über die Erdbeschleunigung messen. Somit wäre Lisa P.s Behauptung widerlegt.
Christoph M. schrieb: > Oh, die vereinigte Dumpfbackenbewegung fängt schrittweise an, das > Funktionsprinzip eines BESCHLEUNIGUNGSSENSORS zu verstehen. Danach war > nun aber in diesem Thread überhaupt nicht gefragt. Naja, es wurde den Dumpfbacken ja nun auch einige Male, unter anderem auch von mir, erklärt, wie die Dinger funktionieren. Scheinbar ist es manchmal eben doch sinnvoll sich mit Prinzipien auseinanderzusetzen. Auch wenn es nicht gefragt war.
Angehängte Dateien:
-

Fadenpendel90cm.png
23 KB -

Fadenpendel100cm.png
23 KB -

Fadenpendel110cm.png
22 KB
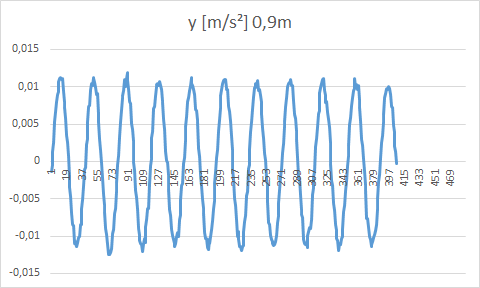
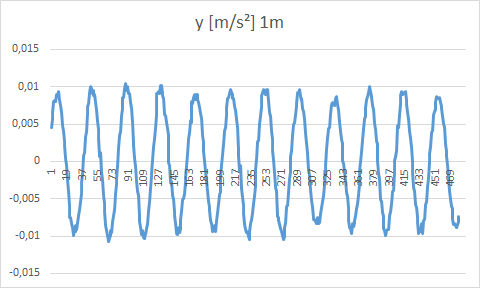
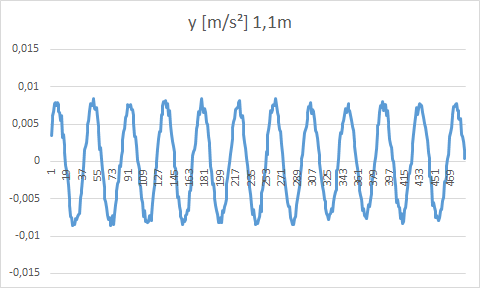
Michael P. schrieb: > Re D. schrieb: >> Fakt ist und bleibt, dass sich die Tangentialbeschleunigung mit der >> Erdbeschleunigung entsprechend der Sensorneigung überlagert und somit >> nicht messbar ist. Die Radialbeschleunigung in den Messwerten zeigt das >> gleiche Muster wie die Berechnung und auch die Größenordnung passt. > > Vielen Dank für diesen Gedankenanstoß, über den ich gestern nachgedacht > habe :-) > Da sollten sich ja der tangential Anteil der g Kraft und die > Tangentialbeschleunigung des Pendels komplet aufheben. > > tang. g Anteil = g * sin(alpha) > > Tangentialbeschleunigung = -g * sin(alpha) * l > > Bei l=1m kommt da für beide Komponenten exakt das Gleiche raus. Meine > Sensoren messen aber bei max/min Ausschlag ca 0,05m/s². Also habe ich > nochmal mein Pendel (Hängeplflanze) genauer vermessen und siehe da: die > Unterkante des Blumentopfes ist 1m vom Aufhängepunkt entfernt, der > Sensor wurde aber am oberen Rand des Blumentopfes angeklebt und ist > somit 0,9m vom Aufhängepunkt entfernt. Und rechnet man obige Überlegung > nochmal mit 0,9m Pendellänge durch, so überwiegt der tangentiale > Erdbeschleunigungsanteil und man erhält im Extrempunkt tatsächlich > 0,05m/s² > Sehr befriedigend :-) > > Das möchte ich heute noch mit einer Fadenlänge von 1m und 1,1m > verifizieren. Die Theorie kann ich mit unterschiedlichen Fadenlängen nicht bestätigen, das Ergebnis im Zitat oben war wohl eher Zufall. Ich habe mir ein neues Pendel aufgebaut bei dem ich die Länge besser variieren kann. Dieses mal pendelt der Sensor in Richtung der y-Achse, z zeigt hinauf zur Aufhängung. Die Ergebnisse decken sich nicht mit obiger Theorie, vielleicht sind auch meine Formeln falsch. Bei gleicher Pendellänge (90cm) und Pendelausschlag erhalte ich nun mit neuem Setup 0,01m/s² statt zuvor 0,05m/s² mit der Hängepflanze. Mit dem neuen Setup hätte ich auf jeden Fall unterschiedliche Beschleunigungswerte für unterschiedliche Pendellängen erwartet, da die Tangentialbeschleunigung des Pendels von der Pendellänge abhängig ist der Tangentialanteil der Erdbeschleunigung aber nicht. Pi*Daumen erhält man aber bei 3 unterschiedlichen Längen das selbe Ergebnis. Ich habe auch noch zusätzlich einen LDR mit verbaut, und das Pendel nur von einer Seite angeleuchtet. Grund: So kann ich das BeschleunigungsMin/Max auch einer der beiden Seiten des Pendels lokal zuordnen denn eigentlich müsste es, lt obigen Formeln, einen Phasensprung geben wenn man unter bzw. über 1m Pendellänge hat, das konnte ich auch nicht feststellen. Danke euch für den Input, mir ist nun zumindest klar geworden, dass es sich hier um eine Art freien Fall handelt und ich mit dem MEMS Beschleunigungssensor nicht, oder nicht einfach, auf die Pendeldistanz rückschließen kann. Hier möchte ich die Sache Rund um das Pendel auch beenden, denn eigentlich wollte ich nur ein Setup um den Sensor definiert hin/her zu schicken um dann zu sehen ob ich anhand der Beschleunigungswerte auch tatsächlich auf die Distanz komme. Fail auf voller Linie mit einem Pendel. Vielleicht hat aber Jemand eine bessere Idee für ein Kontrollsetup mit vertretbarem Aufwand.
Michael P. schrieb: > Bei gleicher Pendellänge (90cm) und Pendelausschlag erhalte ich nun mit > neuem Setup 0,01m/s² statt zuvor 0,05m/s² mit der Hängepflanze. > Mit dem neuen Setup hätte ich auf jeden Fall unterschiedliche > Beschleunigungswerte für unterschiedliche Pendellängen erwartet, da die > Tangentialbeschleunigung des Pendels von der Pendellänge abhängig ist > der Tangentialanteil der Erdbeschleunigung aber nicht. Pi*Daumen erhält > man aber bei 3 unterschiedlichen Längen das selbe Ergebnis. Du hast die Theorie noch nicht ganz verstanden. Wenn dein Sensor im Masseschwerpunkt des Pendels liegt, dann ist die Tangentialbeschleunigung immer gleich der Erdbeschleunigung. Du kannst also (annähernd) nichts Messen. Wenn du den Sensor aber in einem gewissen Abstand zum Masseschwerpunkt anordnest, dann bleibt der g- Abteil bei gleichem phi gleich, die Tangentialbeschleunigung wird aber kleiner (Richtung Aufhängepunkt) bzw. größer (Verlängerung) Grund ist, dass der zurückgelegte Weg des Sensors mit dem Abstand zum Aufhängepunkt größer wird (höhere Geschwindigkeit bei gleicher Winkelgeschwindigkeit). Nimm ein Pendel mit großer Masse und konstanter länge und befestige den Sensor an 3 Unterschiedlichen stellen. Dein Versuchsaufbau oben bestätigt die Theorie nur und widerspricht nicht.
Rainer W. schrieb: > Sven B. schrieb: >> Dieser Typ von Sensor misst Beschleunigungen, nicht Kräfte. > > Nein, bei Beschleunigung des Sensors treten Kräfte zwischen Gehäuse und > innerer Probemasse auf. Genau diese Kräfte werden gemessen. Zusammen mit > der trägen Masse der Probemasse ergibt sich daraus der Wert für die > Beschleunigung. Die Kräfte sind unterschiedlich groß, je nach Beschleunigung. Aber wenn die Beschleunigung null ist, sind auch beide Kräfte null. und ihre Differenz auch. Undas ist am freischwingenden Pendel der Fall.
Re D. schrieb: > Du hast die Theorie noch nicht ganz verstanden. Wenn dein Sensor im > Masseschwerpunkt des Pendels liegt, dann ist die > Tangentialbeschleunigung immer gleich der Erdbeschleunigung. Das habe ich tatsächlich nicht verstanden. Die Tangentialbeschleunigung ist im Masseschwerpunkt immer gleich der Erdbeschleunigung? Ich dachte die Tangentialbeschleunigung ist abhängig von der Länge: Tangentialbeschleunigung = -g * sin(alpha) * l
Ich habe nicht alles gelesen. Aber hier ein paar Anmerkungen. Der Adxl355 ist ein guter Sensor, hat aber einen Empfindlichkeitsfehler von +-1%, der hier aber nicht ins Gewicht fällt. Die Schwingungen von Gebäuden bestimmst du am besten im Frequenzraum. Dazu sampelst du lange Zeitreihen von xyz Beschleunigungswerten. Und machst eine FFT über jeden Kanal. Die Wegamplitude ist einfach FFT*f^2 das ist das Schöne an der Umrechnung in den Frequenzraum, hier ist die Integration viel einfacher. Vor allem gibt es keine Filterung, da man nur eine Frequenz betrachtet. Die Gesamtamplitude ist in erster Näherung die pythagoräische Summe der Amplituden XY und Z (hier sollte aber die Annahme gleicher Phase gelten). Das Ganze geht auch als Leitalgorithmus, wenn du Momentanwerte brauchst.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.