
Ich habe mir ein automatisches Türschloss mit Fingerabdruck gebaut. Da hab ich nen Nema17 Schrittmotor, der mir ein Zahnrad dreht, was dann ein anderes Zahnrad mit dem Schlüssel dreht. Aufgrund der Entfernung der beiden Achsen sind die Zahnräder recht groß (Achsabstand 105mm). Der Schrittmotor hängt an einem Steuerboard DRV8825 als Treiber (https://amzn.eu/d/04A8qNxu). Der Treiber ist versorgt mit einem 12V/4A Netzteil. Und wird von meinem ESP32 mittels AccelStepper Lib angesteuert. So nun mein Problem: Manchmal klappt alles wie es soll, aber in ca. 50% der Fälle rutscht irgendwann der Motor durch, weil ihm die Kraft fehlt. Ich habe eigentlich gedacht der Motor sollte das locker hinbekommen, aber Pustekuchen. Ich habe schon die Microsteps abgeschaltet und die Geschwindigkeit weit runter gestellt, aber ohne nen wirklichen Erfolg. Es ist nur minimal besser geworden. Meine erste Idee wäre sonst ein 24V Netzteil zu nehmen, da ist aber das Problem, dass ich im Gehäuse kaum noch Platz habe und das 24V Netzteil vermutlich nicht passen würde. Eine andere Idee von mir war die Zahnräder unterschiedlich groß zu machen, aber das wird auch schwierig, weil das durch den Türgriff über dem Schlüssel begrenzt ist. Hat jemand ne Idee, was man vielleicht sonst noch machen könnte?
Angehängte Dateien:
-

20240629_192706.jpg
200 KB
Nema17 ist nur die Bauform. Wie sind die konkreten technischen Daten des Motors? Und wie schnell fährt du den Motor? Warum hast du das Zahnrad-Getriebe 1:1 ausgelegt und nicht untersetzt? Wenn der Platz knapp ist, brauchst du entweder eine Zwischenwelle oder du drehst den Motor und treibst das obere Zahnrad über eine Schnecke an. Dann ist das Ganze aber selbsthemmend, d.h. von der anderen Seite nicht mehr per Schlüssel zu öffnen. Mit freundlichen Grüßen Thorsten Ostermann
Ja. 12V ist mager. Ansonsten vergaßest Du zu erwähnen, wie Du den Motorstrom eingestellt hast. Oder zu vergaßest es, ihn einzustellen.
Bernd B. schrieb: > Hat jemand ne Idee, was man vielleicht sonst noch machen könnte? Mit einer Kette wie beim Fahrrad
Bernd B. schrieb: > Aufgrund der Entfernung der beiden Achsen sind die Zahnräder recht groß > (Achsabstand 105mm). Hol dir einen GT2 Flachriemen und nutze eine Untersetzung. Am Motor so ein billiges 20 Zähne Riemenscheibe und auf der anderen Seite eins mit passender Zahnanzahl drucken. Google liefert dir beliebig viele Rechner für Achsabstand und Riemenlänge. Wenn du dich etwas spielst, kannst du ürbigens mit dem Involutegrear-Generator in Freecad eine hinreichend gute GT2 Riemenscheibe machen (Modul 0,618mm funktioniert bei mir ganz gut). Nicht perfekt, aber funktionell, schnell gemacht und immer noch gut zu drucken. Der Motorstrom definiert dir die Kraft. Mit höherer Spannung erhöhst du "nur" die höchste Drehzahl bei dem dein Treiber/Motor Gespann diese auch liefern kann. 73
Bernd B. schrieb: > Eine andere Idee von mir war die Zahnräder > unterschiedlich groß zu machen, aber das wird > auch schwierig, weil das durch den Türgriff über > dem Schlüssel begrenzt ist. Also wenn Du den Motor seitlich vom Schloss anstatt unterhalb platzierst, sollte sich das Zahnrad auf der Motor-Welle doch deutlich verkleinern lassen, denk ich; nachdems aktuell schon bei jedem zweiten klappt scheint ja nicht allzu viel Kraft zu fehlen. P.S.: Sollten sich dabei Motorgehäuse und Klinke ins Gehege kommen, dann kannst Du zumindest mal zum ausprobieren die Klinke auch mal im Hunde/Kleinkinder-Modus (senkrecht nach oben) montieren.
Bernd B. schrieb: > Hat jemand ne Idee, was man vielleicht sonst noch machen könnte? Schmieren und salben hilft allenthalben! In dem Fall ist das Schloss gemeint.
Das ist der Motor, den ich habe: Cloudray Nema 17 Stepper Motor 0,42 N.m 1,7 EIN 2 Phase 40mm Stepper Motor https://a.aliexpress.com/_EJ369or Strom kann er 1,7A ab, so hab ich auch die Begrenzung eingestellt, aber er zieht deutlich weniger. Wieviel ich damals gemessen hatte weiß ich gerade nicht mehr. Glaub so 0,8A ca. Umd mit Schmierung des Schlosses komme ich nicht weiter, das hab ich nämlich ganz am Anfang schon gemacht.
Wie machst du die Kalibrierung des Null-punkt der Stepper ? Ich wuerde sowieso ein anderen verhaltung der Zahnraeder nehmen, vielleicht mit ketten. (Fischer Technik?) Oder, besser funktioniert denke ich noch ein (geared) motor mit 2 endschalter.
> > Hat jemand ne Idee, was man vielleicht sonst noch machen könnte? Anlauf/keinen Anlauf nehmen ... also einen 1 step zurück bevor n+1 Schritte für einen Zahn gesendet werden (Anlauf). Ausrichtung der Zanhradachsen überprüfen, verändern ... wobei bei deine Achsen die Räder garnicht durchstossen und natürlich wenn eine Rückmeldung über die tatsächliche Position hilfreich, damit der Controller einem Durchrutschen automatisch gegensteuern resp wiederholen könnte. Vielleicht ist es aber ein elektrische Problem das dem Motor die Kraft raubt. Beitrag "Wozu 470µ Kondensator bei Schrittmotoransteuerung (L297&L298)"
Hallo Bernd, Bernd B. schrieb: > Das ist der Motor, den ich habe: ... > Strom kann er 1,7A ab, so hab ich auch die Begrenzung eingestellt, aber > er zieht deutlich weniger. > Wieviel ich damals gemessen hatte weiß ich gerade nicht mehr. Glaub so > 0,8A ca. Falsch. Wenn du den Treiber auf 1,7A eingestellt hat, bekommt der Motor diesen Strom auch (zumindest bei ausreichend niedrigen Drehzahlen). Deine 0,8A hast du wahrscheinlich vom Netzteil zum Treiber gemessen, aber das ist eine anderen Spannungsebene. Mit freundlichen Grüßen Thorsten Ostermann
Ich habe ja nur 12V am Netzteil. Je nach Widerstand und Induktion der Wicklung kommt er doch eventuell dann garnicht auf den Strom denke ich mir. Ich habe jetzt ein Netzteil gefunden, das 24V/3A hat und in mein Gehäuse passen würde. Allerdings geht mein Buck-Converter nur bis 23V. Da hab ich überlegt vielleicht 2 Dioden davor zu schalten. Zu den Fragen: Nullpunkt ist die Schlüsselstellung beim Einschalten. Und die Drehung macht er ja immer gleichweit hin und her. also sollte, solange man das nicht per Schlüssel verstellt oder Strom ausfällt ja theoretisch alles immer passen, wenn nichts durchdutscht. Ich hab die Zahnräder gleich groß gemacht, weil ich die Entfernung überbrücken musste, der Platz knapp ist und ich dann eben ne 1:1 Übersetzung habe. Die Idee das mit Riemen zu lösen hatte ich auch, da hatte ich aber bedenken, dass der durchruscht und ich dann eben nicht mehr die genauen Positionen habe. Diese GT2 Riemen kannte ich noch nicht, guck ich mir später mal genau an. Da ist dann wohl die Frage genau den richtigen Riemen zu bekommen.
Angehängte Dateien:
-

Fischertechnik.jpg
230 KB -

20240701_152117.jpg
230 KB -

Zwischenrad.jpg
240 KB -

20240701_152708.jpg
240 KB
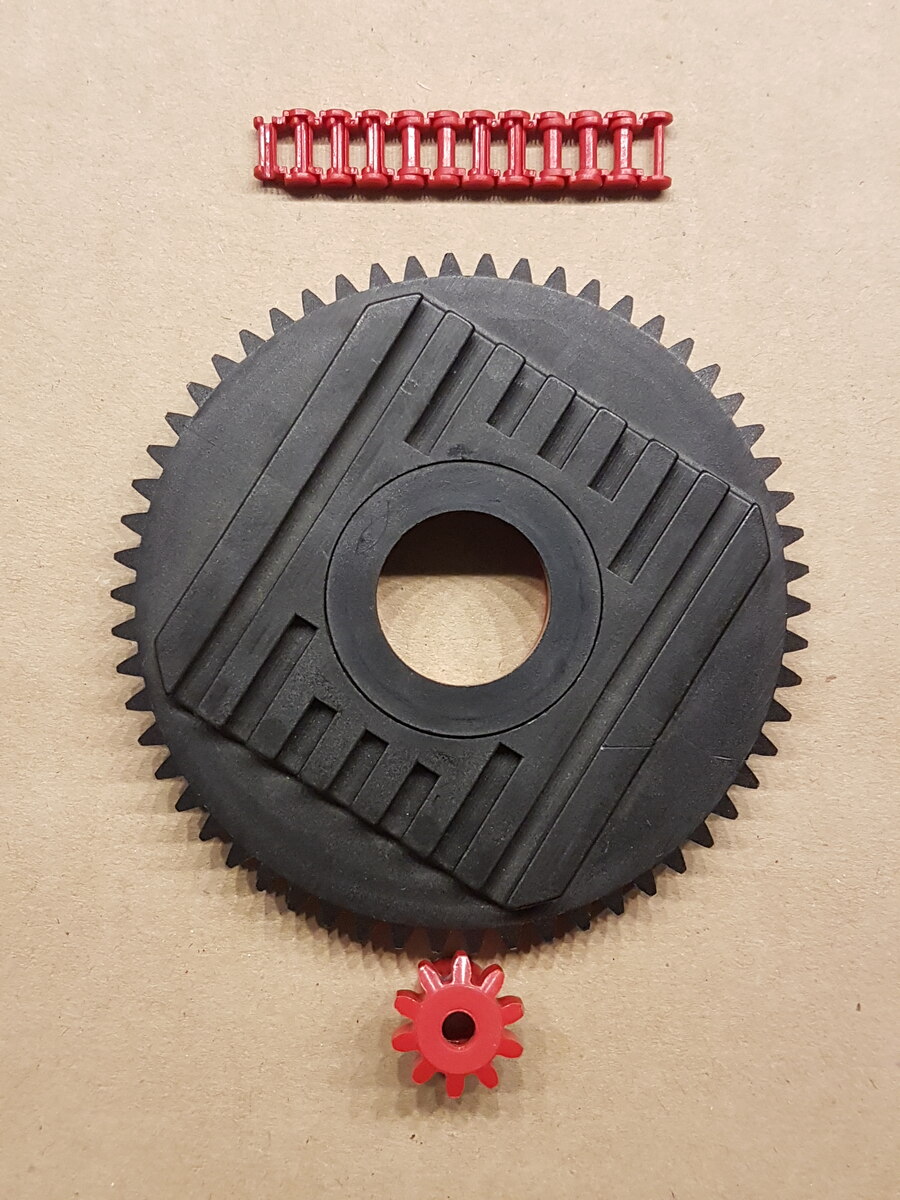

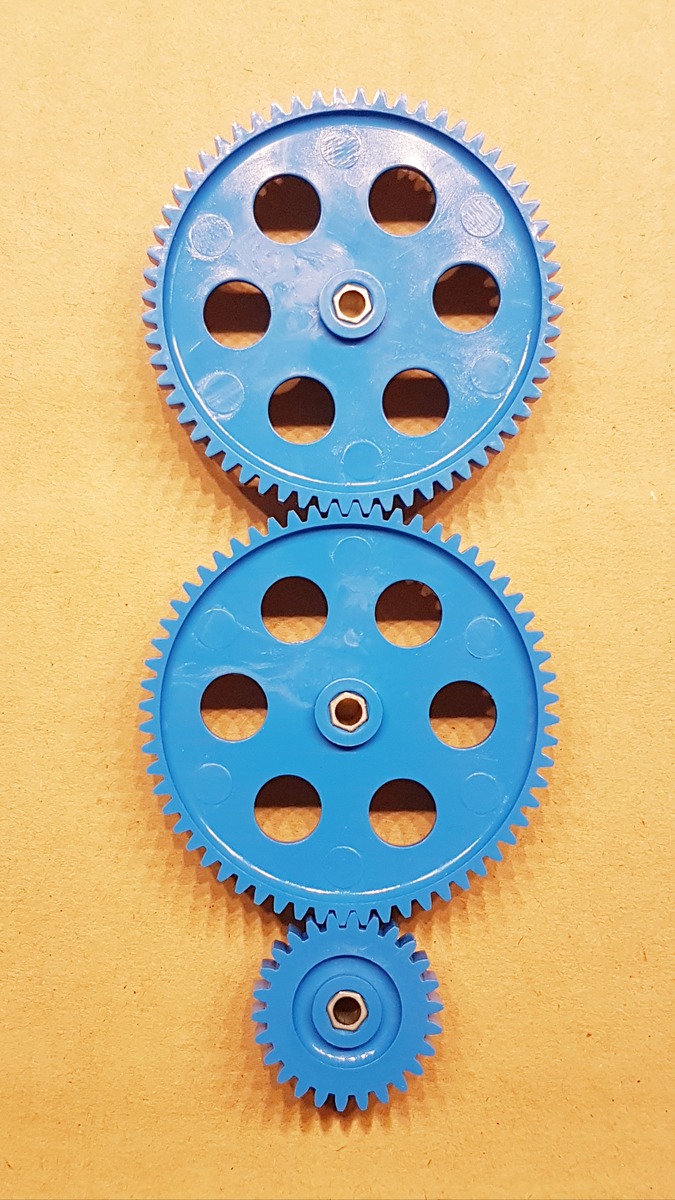
Bernd B. schrieb: > Ich hab die Zahnräder gleich groß gemacht, weil ich die Entfernung > überbrücken musste Der Metallkonstruktionszusatzbaukasten Construction C132 beinhaltet alle erforderlichen Ketten und Zahnräder. Die Naben sind aus Metall und haben eine 4mm Bohrung für die Welle / Achse, die mit einer Madenschraube fixiert wird. Patrick C. schrieb: > Ich wuerde sowieso ein anderen verhaltung der Zahnraeder nehmen, > vielleicht mit ketten. (Fischer Technik?) Auch machbar. Hat auch eine 4mm Nabe. Oder du behältst deine beiden bereits vorhandenen großen Zahnräder und nutzt ein großes Zahnrad einfach nur als Zwischenrad, um den großen Achsabstand zu überbrücken. Das kleine Zahnrad, für die Erhöhung des Drehmoments (mit gleichem Modul), druckst du dir einfach noch zusätzlich dazu aus. Die Drehrichtung muss bei der Verwendung eines Zwischenzahnrads geändert werden!
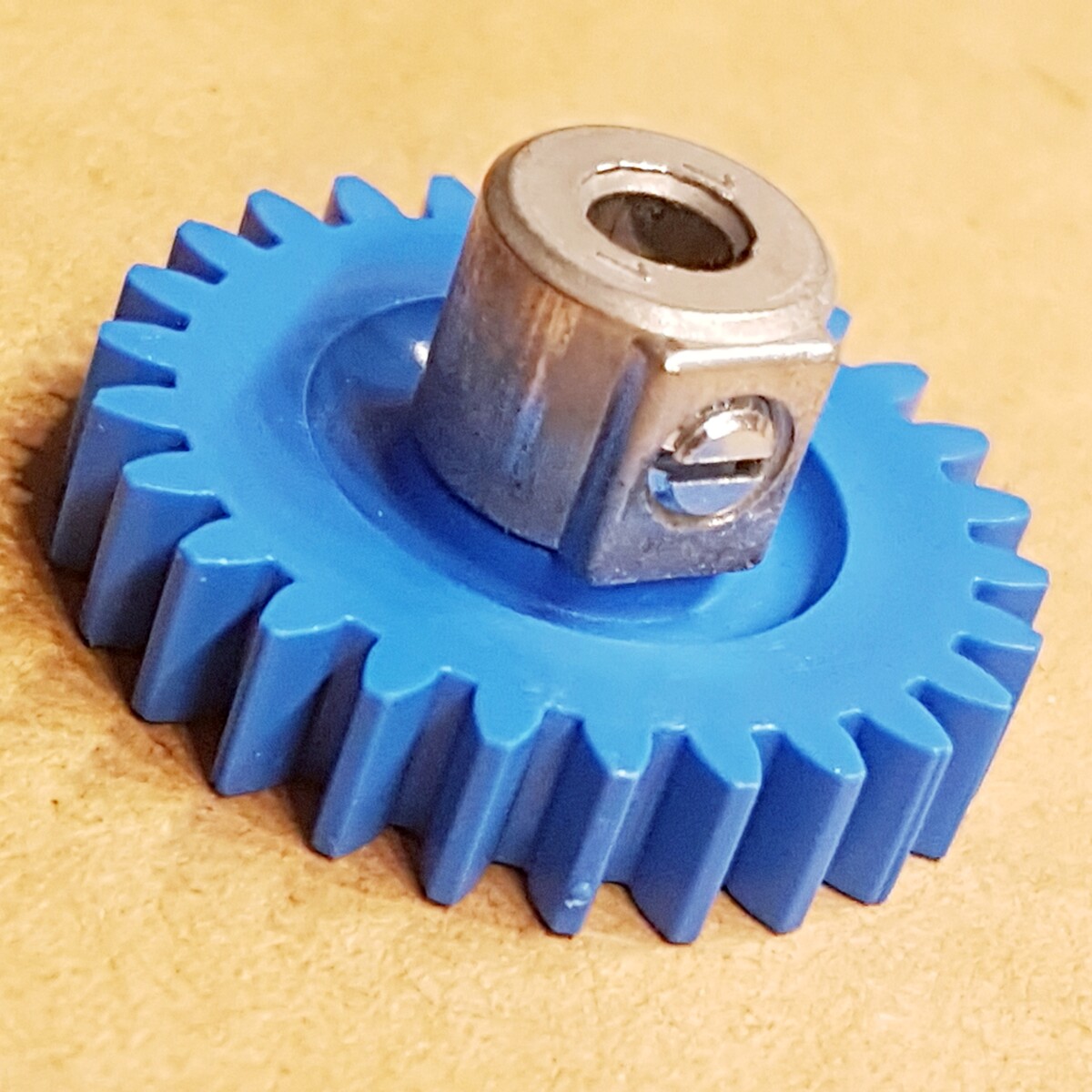
Die Achse vom Schrittmotor ist 5mm auf einer Seite abgeflacht auf 4,5mm. Das andere Zahnrad steckt auf dem Haustürschlüssel, das geht eh nur wenn man das selbst druckt. da frage ich heute Abend mal den Spezi was er empfiehlt. Diese GT2 Zahnriemen, gibt es die in ganz vielen Längen, oder irgendwie anpassbar? Und würde das denn halten, so dass er nicht durchrutschen kann? Meine andere Frage wäre nochmal zum Netzteil. Wenn ich ein 24V Netzteil einbauen würde, ändert das vermutlich viel an. Der Kraft, oder eher nicht?
Bernd B. schrieb: > Wenn ich ein 24V Netzteil einbauen würde, ändert das vermutlich viel an. > Der Kraft, oder eher nicht? Wenn der Motor einen hohen Innenwiderstand hat ja, wenn nicht nicht.
Bernd B. schrieb: > Das andere Zahnrad steckt auf dem Haustürschlüssel, das geht eh nur wenn > man das selbst druckt. Keine zusätzliche Lagerung/Führung? Mechanisch nicht gut gelöst.
Bernd B. schrieb: > Und würde das denn halten, so dass er nicht durchrutschen kann? Zahnriemen können wegen ihrer Formschlüssigkeit automatisch nicht durchrutschen! Keilriemen sind für kleine Keilscheibendurchmesser nicht so gut geeignet. Die Fischertechnik-Flachriemen sind zu weich und zu elastisch.
Es gibt Formeln oder einfacher Online Rechner für die Zahnriemen. Über die Untersetzung und Abstand kommt man so auf die Zähneanzahl oder Riemenumfang und kann dann den nächsten passenden bestellen, den Antrieb im Abstand etwas einstellbar machen. https://www.wantabelt.de/zahnriemen/berechnungsprogramm/bandlangen-rechner-fur-zahnriemen-2 Bei thingiverse gab es auch mal einen Generator für Riemenscheiben, damit liessen die sich in allen Größen drucken. Der basierte auf OpenSCAD Script, die wird man auch noch finden.
Michael M. schrieb: > Zahnriemen können wegen ihrer Formschlüssigkeit automatisch nicht > durchrutschen! Erzähle das meiner Teigmaschine. Deren Riemen rutscht manchmal schon bei 800g Teig durch, obwohl die Maschine für doppelt so viel ausgelegt ist. Due machts bestimmt nicht mehr lange. Ersatzteile gibt es 3 Jahre nach dem Kauf schon nicht mehr. Schöne neue Welt. Ich werde wohl bald wieder "mit Liebe" kneten.
Monk schrieb: > Michael M. schrieb: >> Zahnriemen können wegen ihrer Formschlüssigkeit automatisch nicht >> durchrutschen! > > Erzähle das meiner Teigmaschine. Deren Riemen rutscht manchmal schon bei > 800g Teig durch, obwohl die Maschine für doppelt so viel ausgelegt ist. > > Due machts bestimmt nicht mehr lange. Ersatzteile gibt es 3 Jahre nach > dem Kauf schon nicht mehr. Schöne neue Welt. Ich werde wohl bald wieder > "mit Liebe" kneten. Miese Qualität und miese Konstruktionen gibt es in jedem Bereich, ist aber nichts, was gegen einen Riemenantrieb spricht.
Ralf X. schrieb: > Miese Qualität und miese Konstruktionen gibt es in jedem Bereich, ist > aber nichts, was gegen einen Riemenantrieb spricht. Das stimmt wohl. Bei meinem alten Motorrad lief der Riemenantrieb einige zig tausend Kilometer völlig wartungsfrei. Das neue hat Kette, und nervt mich schon. Ich bin zu Faul für sowas. An dem Schlüssel könnte eine Kette aus dem Modellbau aber gut klappen, denke ich.
Bernd B. schrieb: > Ich habe eigentlich gedacht der Motor sollte das locker hinbekommen, Man wünscht sich nichts zusammen, sondern konstruiert ingenieuermässig, mit Drehmoment, und guckt ins Datenblatt des Steppers, Drehmoment vs. Drehzahl vs. Spannung.
Monk schrieb: > Erzähle das meiner Teigmaschine. Deren Riemen rutscht manchmal schon bei > 800g Teig durch, obwohl die Maschine für doppelt so viel ausgelegt ist. Mehr Wasser in den Teig.
Ralf X. schrieb: > ist aber nichts, was gegen einen Riemenantrieb spricht. Wegen des Schrittmotors muss es aber zwingend ein Zahnriemen sein, sonst kommt nach ein paar mal auf- und zuschließen automatisch Schlupf rein, oder: Patrick C. schrieb: > Motor mit 2 Endschalter.
Bernd B. schrieb: > Wenn ich ein 24V Netzteil einbauen würde, ändert das vermutlich viel an. > Der Kraft, oder eher nicht? Am Haltemoment sollte das erstmal garnichts ändern, erst bei höheren Schrittgeschwindigkeiten macht das einen Unterschied. Laut deinem Link hat dein Stepper 2,6Ohm und 1,7A, das wären ca. 4,4V. Somit sollte deine 12V erstmal dicke ausreichen damit du den Haltestrom auch auf 1.7A (pro Strang) einstellen kannst. Wie hast du den Strom gemessen und eingestellt? An der Stromversorgung kannst du die nicht messen, weil der DRV als Konstantstrom-Schaltregler arbeitet und somit auf der 12V-Seite entsprechend wenige Strom gemessen wird. Stelle also erstmal den Haltestrom richtig ein. - https://www.ti.com/product/de-de/DRV8825 Das mit der Induktivität und der deswegen eventuell benötigten höheren Spannung (als 12V) kommt erst bei entsprechenden hohen Schrittgeschwindigkeiten. Schau dir z.B. mal die Kennlinie hier an. - https://www.nanotec.com/eu/de/produkte/1333-sc4118l1804-eno05k#characteristic
Michael B. schrieb: > Mehr Wasser in den Teig. Geht nicht, dann klebt der Teig rundherum am Schüsselrand fest. Blödes Ding. Ich werde dem Gerät nicht nachtrauern.
Angehängte Dateien:
-

Kopfspiel.jpg
19 KB
Aufgrund der perspektivischen Verzerrung kann man es auf dem Foto nicht sicher bestimmen, aber mir scheint für eine sichere Formschluss das Kopfspiel zu groß.
Bernd B. schrieb: > Diese GT2 Zahnriemen, gibt es die in ganz vielen Längen, oder irgendwie > anpassbar? Das hängt davon ab wieviel du ausgeben willst. Im Prinzip ist jede Länge in 2mm Schritten machbar. Die günstigsten/gängigsten Längen wären in dem Set: https://amazon.de/dp/B08YYF67TR Die findet man natürlich auch "einzeln"... also 1ne Länge aber 5..10 Stück davon im Sackerl. 73
Oha, viele Antworten..... Erstmal zu meiner Fähigkeit als ingenieur... Ich bin Elektroniker und schätze erstmal, hat ja auch fast funktioniert. Formschlüssigkeitb der Zahnräder.... Da es nicht perfekt messbar war, war es beim ersten Druck nicht gut, dann haben wir aber noch Anpassungen gemacht und jetzt ist nahezu kein Spiel mehr. Ich glaube das Foto war noch aus dem ersten Druck. Jetzt zu meinen Fähigkeiten als Bäcker.... Ja! Mehr Wasser! Je mehr Wasser ne Pizza enthält, desto besser wird sie! Allerdings kann man sie ab 80% Wassereh nicht mehr in einer Maschine verarbeiten und muss sie per Hand bearbeiten, aber da geht eben kneten nicht mehr, weil zu Flüssig. Das Zauberwort heißt Folding. teig muss eigentlich garnicht geknetet werden, das Gluten entwickelt sich automatisch, wenn das Mehl feucht ist und es lange genug dumm rumsteht. Ich habe mittlerweile überlegt 2 Riemenräder zu nehmen, die man kaufen kann. Eins mit 20 Zähnen, eins mit 80. Also meiner Logik nach Übersetzung 1:4. Das 80er Zahnrad kommt per 3D-Druck aud den Schlüssel, da mein Experte die Daten für so ein Riemenrad in seinem Programm nicht hat, drückt er mir die Schlüsselhalterung mit ner Achse auf die ich vorhabe ein gekauftes 80er Riemenrad drauf schrauben kann. Die Länge an Zahnriemen gibt es scheinbar auch auf 0,5mm genau passend. Morgen muss ich das alles mal genau ausrechnen. So viel zur aktuellen Überlegung. Zumindest hat mir die Diskussion neue Ideen gebracht, mit denen ich mein Problem lösen kann denke ich. Ich hoffe, ich hab keinen Post vergessen zu beantworten.
Achja Strom am DRV hab ich als erstes richtig eingestellt. Wo ich den aktuellen Strom das damals genau gemessen habe, erinnere ich mich nicht mehr, aber vermutlich tatsächlich in der Leitung zum Treiber. Aber ich hab vorhin auch nochmal grob gerechnet und kam zum selben Ergebnis, dass die Spannung vermutlich nicht wirklich was bringt, daher lieber die Mechanik umbauen.
So aktueller Stand..... Die Zahnräder aus China sind gekommen, die Berechnung der Riemenlänge hätte vermutlich auch gepasst, wenn der Schlüssel kein Spiel hätte, hat aber. Also heute alles eingebaut, getestet und ich muss leider kleinere Riemen bestellen. Aber zumindest ist es deutlich leiser und sieht auch schöner aus! (und funktioniert, wenn ich den Riemen provisorisch spanne perfecto. Also nochmal vielen Dank für den Tipp mit den GT2 Riemen!

Hans W. schrieb: > Hol dir einen GT2 Flachriemen und nutze eine Untersetzung. Am Motor so > ein billiges 20 Zähne Riemenscheibe und auf der anderen Seite eins mit > passender Zahnanzahl drucken. > > Google liefert dir beliebig viele Rechner für Achsabstand und > Riemenlänge. > > Wenn du dich etwas spielst, kannst du ürbigens mit dem > Involutegrear-Generator in Freecad eine hinreichend gute GT2 > Riemenscheibe machen (Modul 0,618mm funktioniert bei mir ganz gut). > Nicht perfekt, aber funktionell, schnell gemacht und immer noch gut zu > drucken. Das war die Lösung, auch wenn ich es etwas anders gelöst und fertige Riemenschiben genommen habe, die ich auf der neuen 3D Druck geschraubt habe. Vielen Dank nochmal!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.