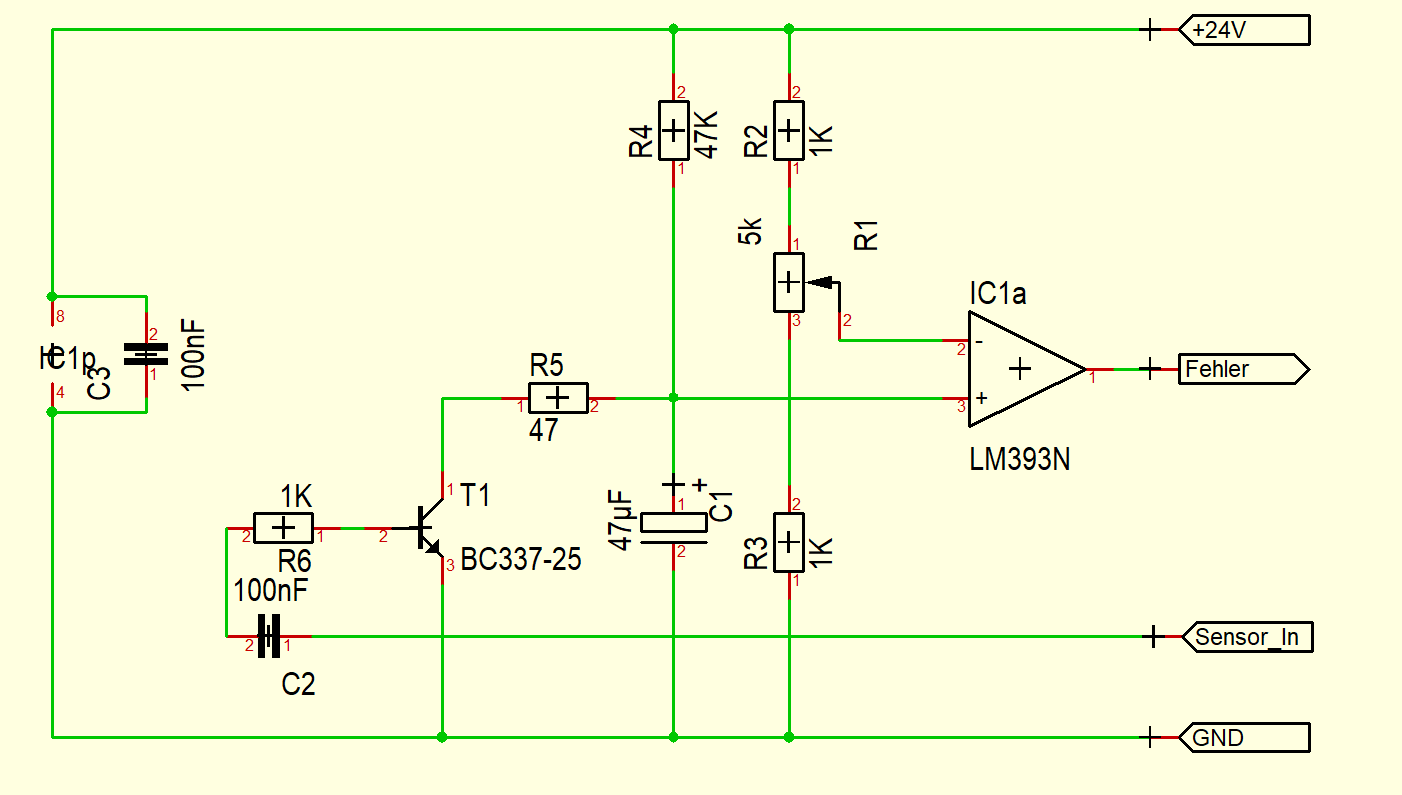
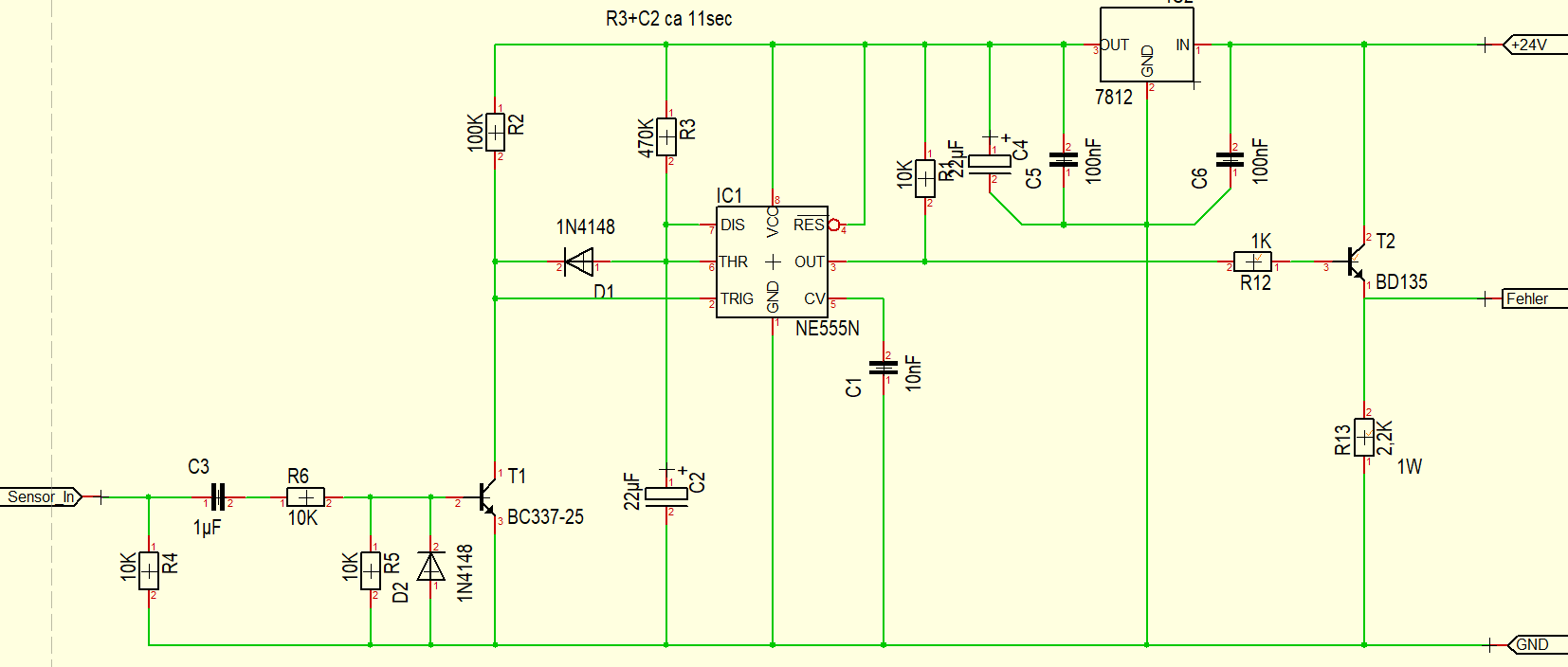
Hallo, eine Frage zur angehängten Schaltung, ich möchte damit ein langsam drehendes Zahnrad überwachen. Ziel der einfachen Schaltung soll sein, dass ich eine Meldung erhalte, wenn sich das Zahnrad nicht mehr dreht. Die Meldung darf zeitversetzt erfolgen. Das Signal vom Sensor (induktiver Positionsgeber 24V) geht über C2 + R6 an T1, dieser soll regelmäßig C1 des RC-Gliedes entladen. Das Signal des Sensors hat im Fehlerfall entweder dauerhaft high oder dauerhaft low Pegel. Im Normalbetrieb wechselt der Pegel mit 1-10 Hz. Mein Gedankengang war dass ich mit dem Poti eine „Vergleichsspannung“ einstellen kann, welche dann eine „Verzögerungszeit“ darstellen soll. Die Einstellung ist jedoch aufgrund der Ladekurve nicht linear, was aber nichts ausmacht. Der OP vergleicht beide Spannungen und soll den Ausgang auf High schalten, wenn die Impulse ausbleiben. Würde dies so funktionieren? Das Ganze hat keinerlei Sicherheitsaufgaben. Es soll nur überwacht werden ob die Kraftübertragung per Zahnriemen funktioniert – oder ob dieser gerissen ist. Danke und Gruß Stefan
Angehängte Dateien:
-

Auswertung_Sensor.PNG
16 KB
Stefan B. schrieb: > Würde dies so funktionieren? So ungefähr. Impulsausfallerkennung. Lediglich die Kondensatorankopplung des Impulseingangs müsste man mal ausprobieren. Und 47k/47k am Elko bringt den nicht unter VCC/2, ich würde den Widerstand zum Transistor auf 1k absenken. Und deine Widerstandswerte am Poti sind sehr niedrig, ein höherohmiges Poti braucht weniger Strom. Wenn länger ein Impuls fehlt steigt die Spannung über VCC-1.5V und der LM393 vergleicht nicht mehr richtig. Die 47k die an den Transistor gehen dürfen direkt an Masse, das verhindert dann dass die Eingänge über VCC/2 steigen Ich würde der Schaltung auch eine ordentliche Hysterese verpassen, eben damit sie im Umschaltmoment nicht die Störungen der Versorgungsspannung überträgt. Impulsausfallerkennungen baut man auch gerne mit NE555 auf, der hat die Hysterese von Haus aus.
Der Widerstand zum Transistor hat nur 47Ohm, damit sollte der Elko relativ tief entladen werden können. Hysterese kann ich noch mit einbauen. Werde die Schaltung mal testweise aufbauen, auch wegen der kapazitiven Ankopplung des Sensors.
Stefan B. schrieb: > Würde dies so funktionieren? Nein. C2 lädt sich einmalig auf und das wars. Außerdem wird bei 24V die negative U_BE des T1 deutlich überschritten.
Stefan B. schrieb: > (induktiver Positionsgeber 24V) Gibts da ein Datenblatt dazu? Was für einen Ausgang hat der? Wenn es ein "normaler" plusschaltender Sensor ist, dann fehlt der kapazitiven Eingangsstufe der Entladewiderstand. Wenn es ein minusschaltender Sensor ist, dann fehlt ein Pullup. Deine Schaltung könnte bestenfalls dann funktionieren, wenn der Sensor einen Gegentaktausgang hat. Aber auch dann würde ich den Transistor mit einem Pulldown einen definierten Arbeitspunkt verschaffen und mit einer antiparallel zur BE-Diode geschalteten 4148 vor negativen Spannungen an der Basis schützen.
Bau noch eine Diode antiparallel zur BE Diode vom Transistor T1 ein. Und einen Wid (ca. 330k) parallel zu C1, damit der OP + Eingang innerhalb des erlaubten Eingangsspannungsbereichs bleibt (ca. VCC -2V). P.S. der Output vom LM393 ist ein OC.
Der Sensor ist ein ganz normaler M12 Näherungssensor der zwischen 0 und 24V schaltet. Ich ändere mal den Plan und stelle den mal ein
Angehängte Dateien:
-

Auswertung_Sensor1.PNG
12 KB
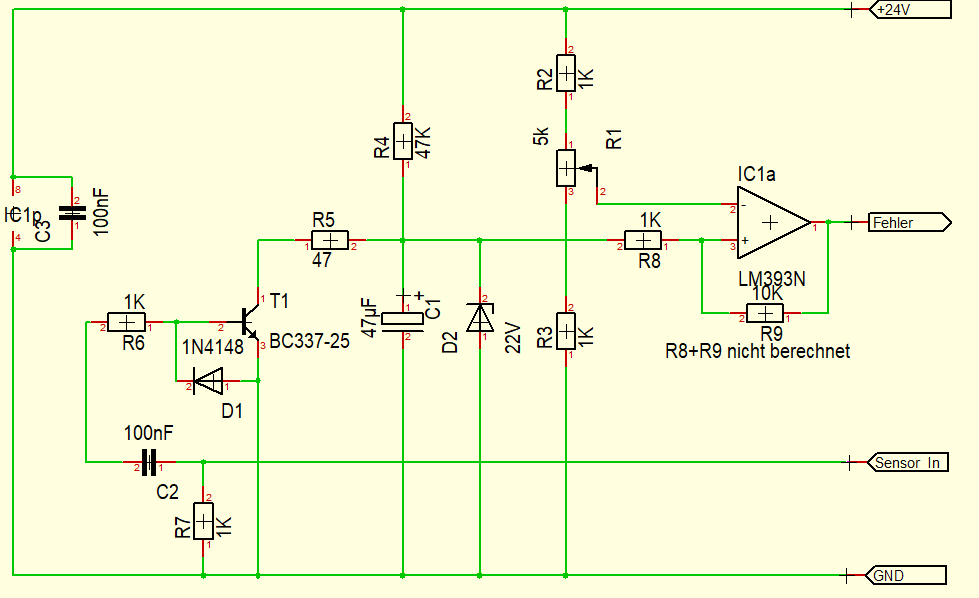
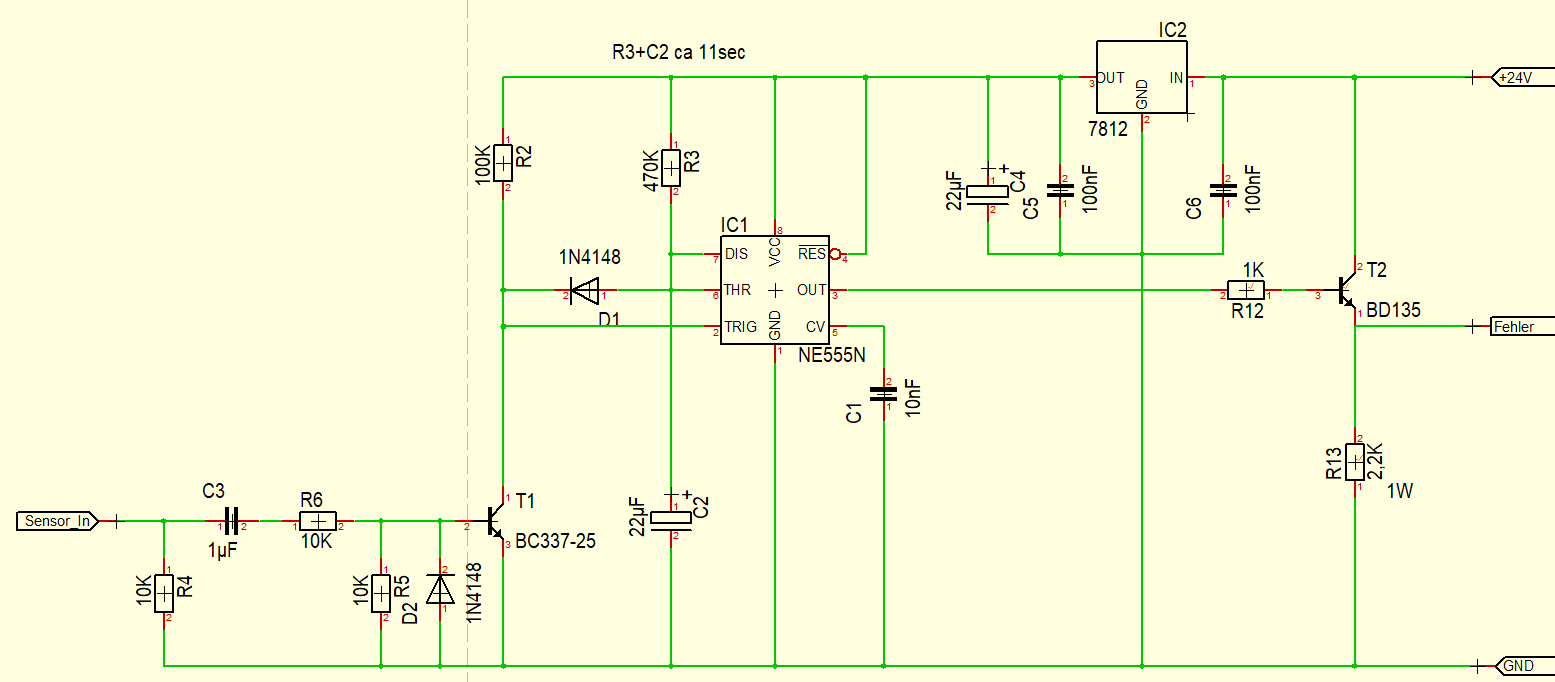
Hab jetzt mal eine Z-Diode in den OP+ Zweig mit rein und die Hysterese (unberechnet!); Am Impulseingang einen 1k nach GND, dann sollte sich der C ja über die beiden R's und die BE-Strecke entladen können. Den R (330k) par. zum C habe ich jetzt nicht mit eingezeichnet, kann mir der den T1 nicht dauerhaft leitend machen, wenn Sensor betätigt ist, also 24V anliegen, ich muss im Fehlerfall ja beide Zustände (0V / 24V) auswerten können.
Stefan B. schrieb: > Der Sensor ist ein ganz normaler M12 Näherungssensor Welcher denn? Es gibt "ganz" normale, die Minus schalten, es gibt "ganz normale", die Plus schalten, und es gibt sie auch mit Gegentaktausgang. Aber offenbar hast du einen, der die Highside schaltet. Stefan B. schrieb: > dann sollte sich der C ja über die beiden R's und die BE-Strecke > entladen können. Dann wird der Transistor nur ganz schleichend sperren, weil keiner aktiv die Basis ausräumt. Sondern je niedriger die Ube wird, umso geringer wird der Basisstrom (Stichwort Diodenkennlinie) und desto weniger wird der Kondensator entladen. Und im Grunde wird der dann nie ganz entladen... Also: mach einen Widerstand parallel zur D1, damit die Entladung in endlicher Zeit vor sich geht.
Angehängte Dateien:
-

Auswertung_Sensor2.PNG
13 KB
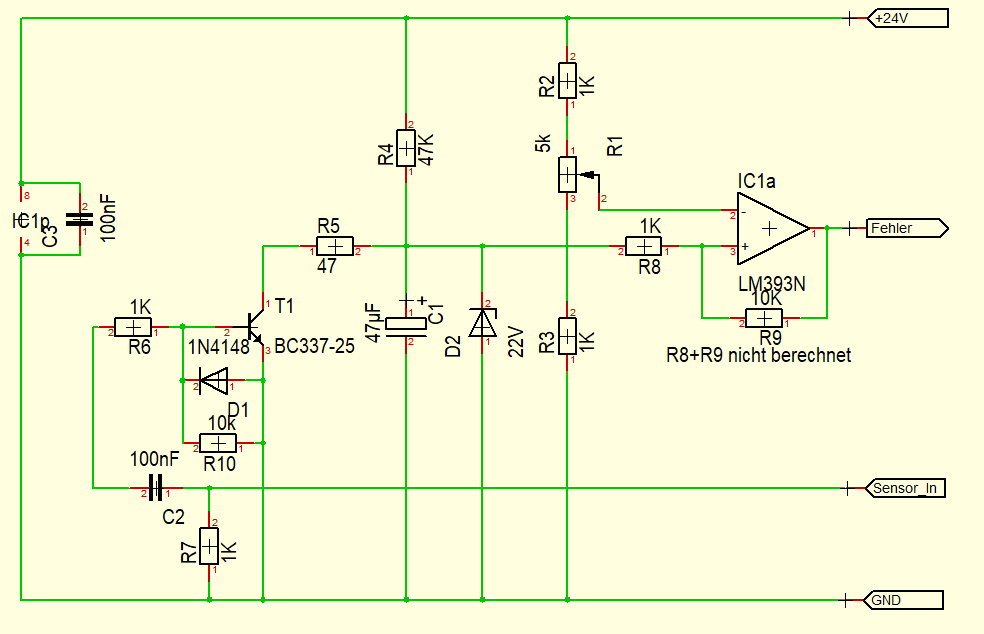
Sensor: BES M12MI-PSC20B-BV03 Widerstand zur Diode ist drin.
Angehängte Dateien:
-

20240806_144444.png
31 KB
Bei 24V Impulsen können R6 und R7 etwas hochohmiger gemacht werden. Damit die Hysterese überhaupt funktioniert, muss am Ausgang noch ein Pullup Widerstand hin. Aber eigentlich braucht man nicht unbedingt eine Hysterese, weil C1 bei fehlenden Impulsen das System in einen eindeutig definierten sicheren Zustand hochfährt. Das Einstellen der Ansprechzeit kann mit einem 100k Trimmer an dieser Stelle vorgenommen werden. C2 mit nur 100nF könnte evtl. für den Entladeimpuls für den 47uF Elko zu klein sein. C2 sollte also noch auf 1uF oder mehr vergrößert werden.
Ich werde die Schaltung in den nächsten Tagen mal aufbauen und testen. Vielen Dank für die Hilfe bisher!
Michael K. schrieb: > Muss R9 nicht an den invertierten Eingang hin? Nicht, wenn man Hysterese braucht, weil auch bei langsam veränderlichen Eingangssignal ein einwandfreies Rechteck rauskommen soll.
R8 könnte man noch ein Stück größer machen (4k7 bis 22k), damit die Hysterese nicht so knapp bemessen ist.
Ich würde einfach einen retriggerbaren Monoflop dafür nehmen, z.B. CD4047, CD4538.
Angehängte Dateien:
-

ImpulsNE555.PNG
20 KB
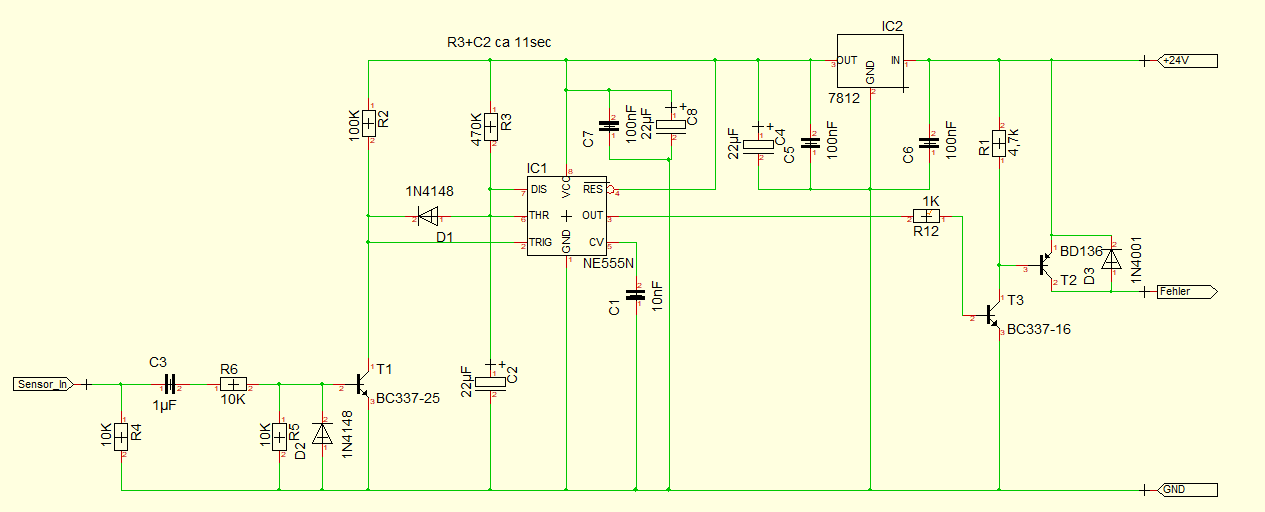
Hallo, Monoflop hab ich leider nicht greifbar, aber ein NE555 als Monoflop würde dann evtl auch funktionieren wie oben gezeichnet.? Kann mich leider erst am Wochenende hinsetzten und eine Schaltung zum testen aufbauen.
Stefan B. schrieb: > würde dann > evtl auch funktionieren wie oben gezeichnet. DIScharge ? 10k Ausgangspullup ? Du musst nur das Aufladen von C2 (an TRIG und THRE) über R3 unterbrechen durch deinen Transistor.
Ja, der R1 sollte nicht mehr drin sein, stammt noch von der ersten Schaltung.
Angehängte Dateien:
-

NE555-2.PNG
18 KB
Das Entladen von R3+C2 sollte über die Diode D1 ablaufen, und auch TRIG wird bei einem Eingangsimpuls resetet.
Stefan B. schrieb: > würde dann evtl auch funktionieren wie oben gezeichnet.? 2 Fragen: - Welche Timeoutzeit willst du denn realisieren und wie genau muss die eingehalten werden? - Was hängt am Ausgang "Fehler" der Auswerteschaltung?
Timeoutzeit, sollte innerhalb von ca. 10 sec. kein Impuls mehr kommen, liegt ein Fehler vor, ob 8 sec. oder 12 sec. ist egal. Das Zahnrad dreht mit 1-10 U/min, ich erhalte 5 Impulse je Umdrehung. Am Ausgang wird eine Glühlampe oder LED angeschlossen werden.
Bedenke dass T2 in Kollektorschaltung arbeitet und am Fehlerausgang nie mehr als 11,3V rauskommen können! Das Ersetzen von T2 durch einen PNP Transistor hilft auch nicht, weil der PNP Transistor nie abschalten würde. Lösung: T2 als Emitterschaltung umbauen (BC337) und dahinter noch einen PNP Transistor T3 (BD138) schalten, damit die Logik wieder stimmt. Evtl. R13 weglassen und den zukünftigen PNP Ausgang dann als "Offenen Kollektor" auslegen (der 2k2 verheizt 260mW).
Beitrag #7715260 wurde von einem Moderator gelöscht.
Stefan B. schrieb: > Das Zahnrad dreht mit 1-10 U/min, ich erhalte 5 Impulse je Umdrehung. Oha, das wären schlimmstenfalls bei 1 U/min zwischen 2 Impulsen eine Zeit von 12 Sekunden. Da sehe ich schon theoretische/mathemaitsche Probleme bei einem 10-Sekunden-Timeout... Du wirst viel mehr Zähne brauchen oder eine deutlich längere Zeit für dein Timeout. Wie ist denn das Tastverhältnis des Sensorsignals?
Angehängte Dateien:
-

NE555-3.PNG
13 KB
hab die Schaltung nochmals geändert, @Lothar: ich denke deine Schaltung haut so nicht hin, mein Sensor liefert je nach Stellung 24V oder 0V, also im Fehlerfall (je nach Stellung des Zahnrades) könnten auch dauerhaft 24V anliegen, dies würde ja nicht als Fehler erkannt. ich kann die Zeit auch noch verlängern, die 1 U/min sind minimal mögliche Drehzahl, Normaldrehzahl ist im Bereich 4-10U/min; Tastverhältnis etwa 60aus : 40ein. Mehr Zähne gehen nicht, am Zahnrad kann ich nichts ändern.
Angehängte Dateien:
-

Impulstimeout2.PNG
38 KB
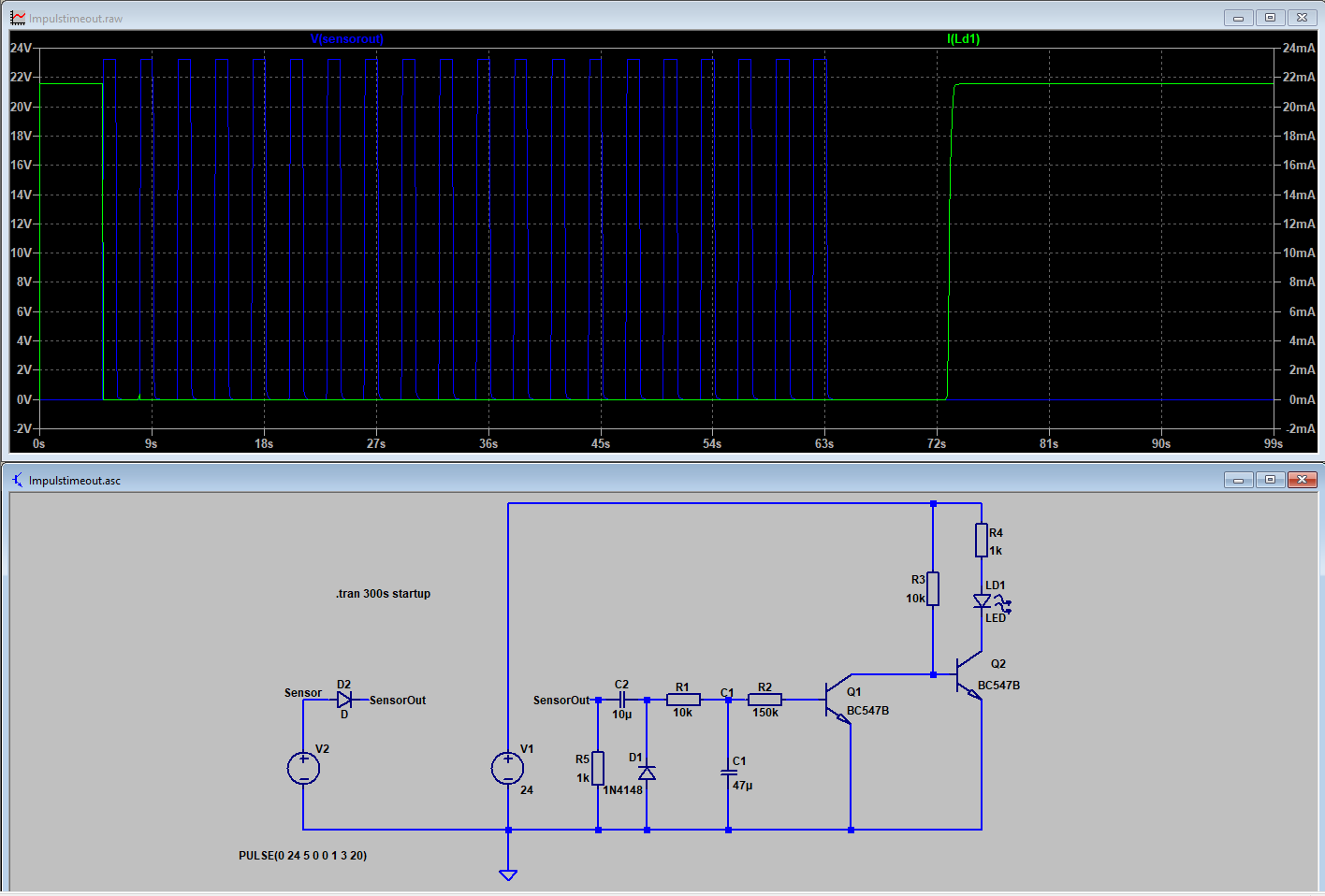
Stefan B. schrieb: > @Lothar: ich denke deine Schaltung haut so nicht hin Ja, habe ich auch gesehen, dann überarbeitet und mit neuem "Worst-Case-Timing" (3s Pulsdauer mit 40% High-Zeit) simuliert.
Angehängte Dateien:
-

20240807_115751.png
24 KB
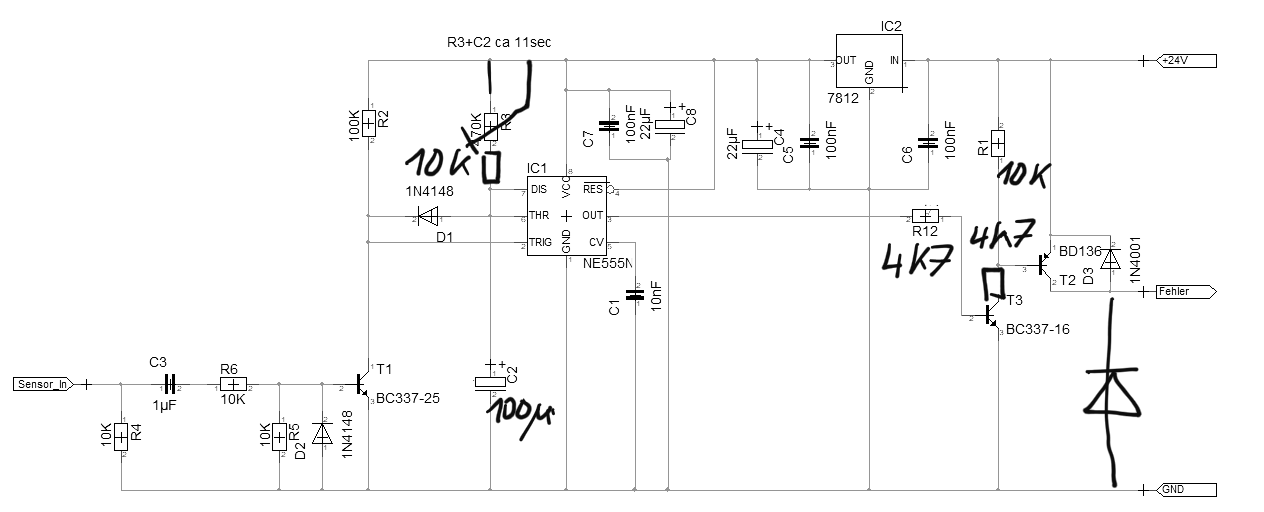
Jetzt fehlt nur noch der Basisvorwiderstand von T2. Wenn für C2 ein 100uF Elko eingesetzt wird, dann kann man R3 auch als 500k Trimmer auslegen und die Timeoutzeit stufenlos einstellen.
Danke vorerst, ich werde am Wochenende die Schaltungen testen und wieder berichten.
Mit einem XOR Gatter (CD4070) und einem RC Glied können auch beide Flanken detektiert werden. Aus den restlichen Gattern kann das nachgeschaltete Monoflop realisiert werden. Das würde sich anbieten, wenn der 24V Sensor einen offenen Kollektor hat und somit ein 12V Signal liefern kann. Die zweite Möglichkeit ist ein Dualoptokoppler bei dem beide Eingangs LEDs antiparallel geschaltetet sind und über einen 470uF Elko mit Vorwiderstand vom Sensor direkt angesteuert werden.
Wenn ich da eine Schaltung mit Spannungsregler und viel sonstigem Klimbim sehe, dann denke ich sofort an einen 8-Pin µC...
1 | 24V ---o------------------------------------------o--- |
2 | | | |
3 | 4k7 | |
4 | | µC Lampe |
5 | o----o-------o---- Vcc | |
6 | | | | | |
7 | 4v7 ,- === 10u - |/ |
8 | ^ | ^ Output --4k7--| |
9 | | | | |> |
10 | - - | | |
11 | | | |
12 | Sensor -----12k-----o---- Input | |
13 | | | |
14 | 2k7 GND | |
15 | | | | |
16 | | | | |
17 | GND -----o----------o-----------o-----------------o---- |
18 | | |
19 | - |
Nur 9 Bauteile und ein paar Zeilen Programm. Einfacher geht es kaum. Wenn man die Zeit dann auch noch einstellen will, kann man ja einfach ein Poti als 11. Bauteil an den µC basteln. Wenn man statt des simplen Transistors am Ausgang einen Smartswitch wie z.B. den BSP452 nimmt, dann hat man 1 Bauteil weniger. Und dazu die ganzen Schutzschaltungen des BSP gleich mit drin.
Stefan B. schrieb: > hab die Schaltung nochmals geändert Ich würde noch einen Widerstand einbauen, um den Kollektorstrom von T1 beim Entladen von C2 zu begrenzen. Man könnte auch länger durchrechnen, ob bei maximalem Basisstrom und maximaler Verstärkung von T1 der erlaubte Spitzenstrom nicht überschritten wird, aber dafür wäre ich zu faul...
Ich hab gestern die Variante mit NE555 aufgebaut und getestet. Läuft, ist aber schon ein erheblicher Aufwand. Die Variante mit µC ist da dann doch wesentlich einfacher..
Stefan B. schrieb: > Die Variante mit µC ist da dann doch wesentlich einfacher.. Einverstanden, gibt es vielleicht noch einen andere processor im gesammten System der dafuer benutzt werden kann ? Beim uC kann man auch einfacher die richtige (timing) parameters eingeben statt parameters die man mittels analoge componenten berechtet und abhaengig sein von zB Frequenz oder entprellung der eingang Vergess auch nicht das EINSCHALTEN des systems. Patrick aus die Niederlande [Edit : Typos]
Angehängte Dateien:
-

PCB.PNG
140 KB
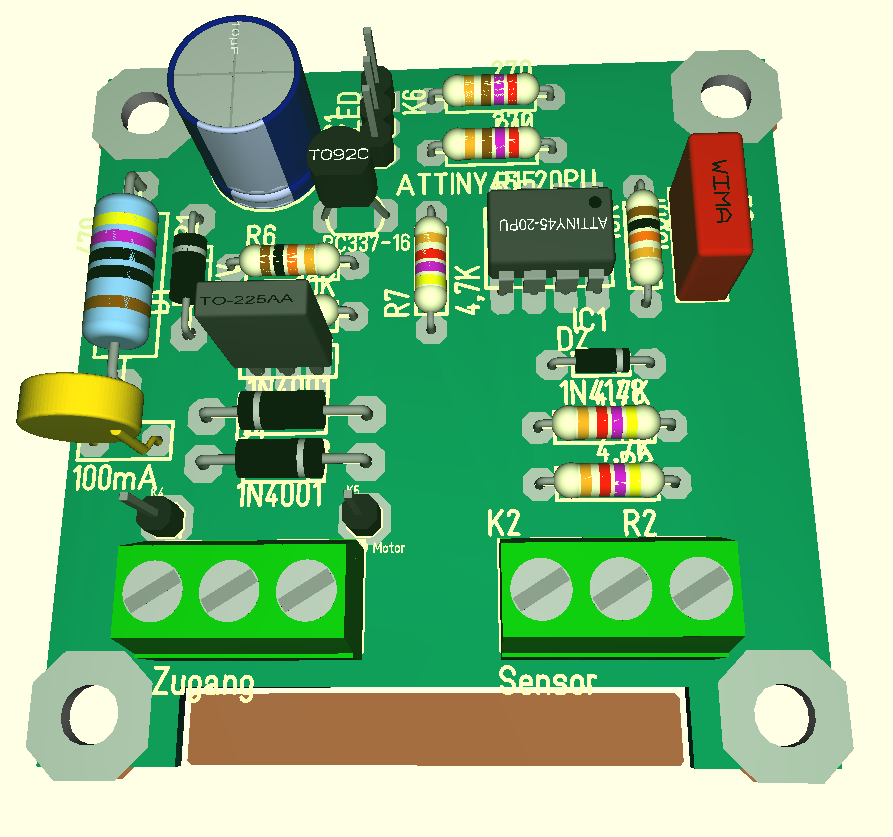
Hallo, hab mal schnell ein PCB mit Attiny gezeichnet, es schaut aufgeräumt aus - trotz zusätzlicher Funktionen (LED direkt an der Pumpe), die analoge Lösung ist deutlich aufwendiger. Es gibt sonst keinen µC, die Platine darf max. 48x48mm haben und kommt direkt an den Pumpenmotor hinten mit ran.. Zum Motor geht ein 3 poliges Kabel, welches den Motor mit 24V versorgt, wenn dieser läuft. Es reicht aus wenn ich ein Signal bekomme wenn der Motor angesteuert wird, aber die Hydraulikpumpe nicht mitläuft, die Verbindung Motor/Pumpe erfolgt per Zahnriemen. Die Pumpe dreht im Normalbetrieb mit 4-5U/min und fördert dabei etwa 0,3l/h Schmieröl. Ein kurzes versagen der Schmierung ist kein Problem, da genügend Restöl vorhanden ist, aber ein längerer Ausfall wird dann zum Problem.,, Gruß aus Bayern!
Lothar M. schrieb: > Nur 9 Bauteile und ein paar Zeilen Programm. Einfacher geht es kaum. Hmm, du hast klugerweise an die notwendige Spannungsregelung und -wandlung gedacht. Nutzt man gleich passende Bauteile, kommt man mit 7 aus
1 | +24V --------+----+ |
2 | | | |
3 | R R |
4 | | | |
5 | | +-- out |
6 | | | |
7 | +---+--TL431 |
8 | NPN | | | |
9 | --C--+--|< C | |
10 | _|_ |E | | |
11 | /_\ | | | |
12 | | | | | |
13 | GND -+---+---+----+ |
Michael B. schrieb: > Nutzt man gleich passende Bauteile, kommt man mit 7 aus Damit lassen sich aber noch keine weithin sichtbaren Lampen ansteuern. Und ich möchte in dieser Schaltung nicht der Transistor sein und 5x pro Minute 24V auf die Basis bekommen... ;-)
Lothar M. schrieb: > Damit lassen sich aber noch keine weithin sichtbaren Lampen ansteuern. Da ein TL431 100mA schafft, hat man 2.4 Watt, das reicht locker. > Und ich möchte in dieser Schaltung nicht der Transistor sein und 5x pro > Minute 24V auf die Basis bekommen... ;-) Keine Basis bekommt 24V, sie bekommt Strom durch den Kondensator, begrenzt durch den Näherungssensor, und das hält sie aus. Steck dir dein FUD also sonstwohin.
Michael B. schrieb: > Keine Basis bekommt 24V, sie bekommt Strom durch den Kondensator Ist mir klar. > begrenzt durch den Näherungssensor, und das hält sie aus. Da sollte man aber schon genauer hinschauen, denn der hier verwendete Sensor hat immerhin einen Bemessungsdauerstrom von 200mA. Das heißt, dann er beim Umschalten problemlos auch mal 1A kann. Für einen üblichen BCxxx ist das zu viel. > Steck dir dein FUD also sonstwohin. Offenbar bist du der Einzige, der diese Bedenken nicht hat, denn der entsprechende Strombegrenzungswiderstand ist schon ab der allerersten Schaltung hier im Thread drin.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.