
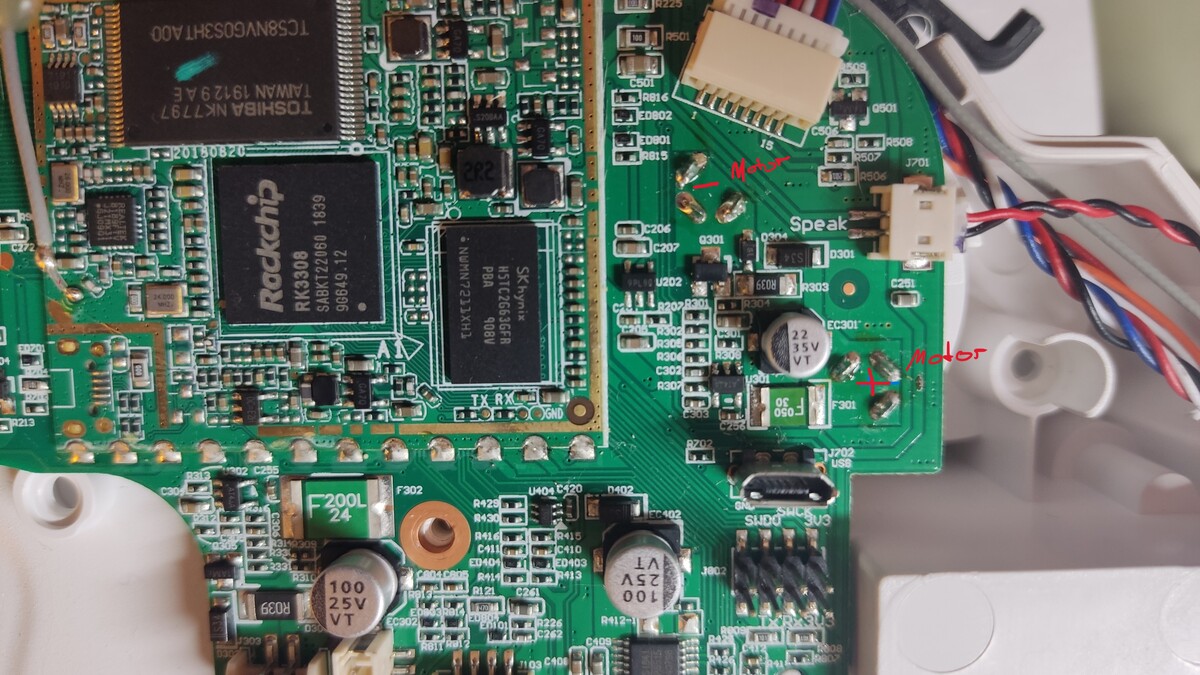
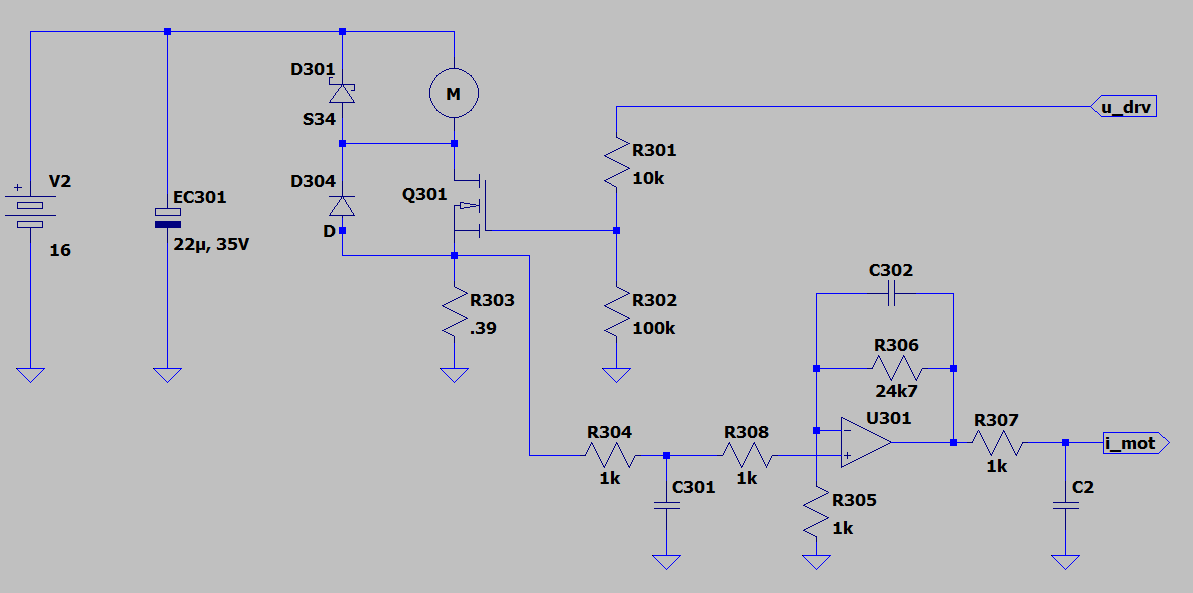
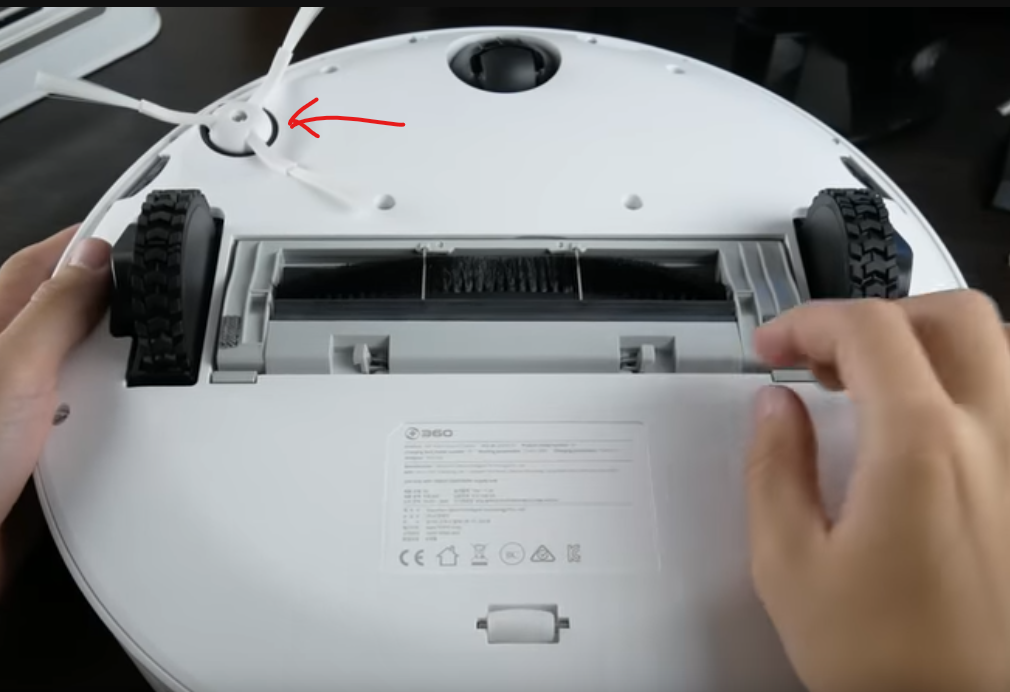
Hallo allerseits, mein Staubsaugerroboter zeigt nach mehreren Jahren problemlosen Betriebs einen Fehler: Die Seitenbürste dreht dauerhaft, nicht mehr nur während der Reinigung. Ich habe das Teil also aufgeschraubt und mir die Platine rund um den Motor für die Seitenbürste angeschaut und versucht das Ganze zu verstehen. Bin auf den angehängten Schaltplan gekommen. Bei Q301 messe ich 40 Ohm zwischen Drain und Source. Der ist also hinüber. Nach Abbauen des Motors und Auslöten von Q301 (SOT-23 Marking WFAG9J) zeigen D301 und D302 je 180mV beim Diodentest, dürften also intakte Schottky-Dioden sein. u_drv habe ich mit dem Oszi angeschaut (Anhang). Es ist ein 3.3V Rechteck mit 24 kHz. Batteriespannung beträgt 16V (unbelastet). Der Motor selbst dreht und klingt am Labornetzteil bei 16V normal und nimmt 55mA auf. Sollte also OK sein. Das einzige kaputte Bauteil, das ich bisher gefunden habe, ist also der Q301. An logic-level Mosfets in SOT-23 habe ich nur den IRLML6244 hier. Also so einen eingelötet. Damit war der Fehler erstmal weg. Motor drehte nur noch während der Reinigung, nicht mehr beim Aufladen. Die Freude hielt aber nur eine halbe Stunde. Nun dreht der Motor wieder dauerhaft und auch der neue Mosfet hat einen Drain-Source Kurzschluss. Mit max. 20V Drain-Source Spannung ist der IRLML6244 vielleicht auch ein bisschen zu empfindlich... Habt ihr Vorschläge, was man stattdessen verwenden sollte? Sollte ich noch etwas ganz anders prüfen, bevor ich weitere Mosfets opfere? :-) Bin für Tipps dankbar Sebastian
Angehängte Dateien:
-

u_drv_operating.png
41 KB -

1723977338307.jpg
240 KB -

360_s5_sidemotordriver.png
9,5 KB
Angehängte Dateien:
-

q301.jpg
230 KB -

dioden.jpg
240 KB -

WIN_20240821_19_33_34_Pro.jpg
230 KB
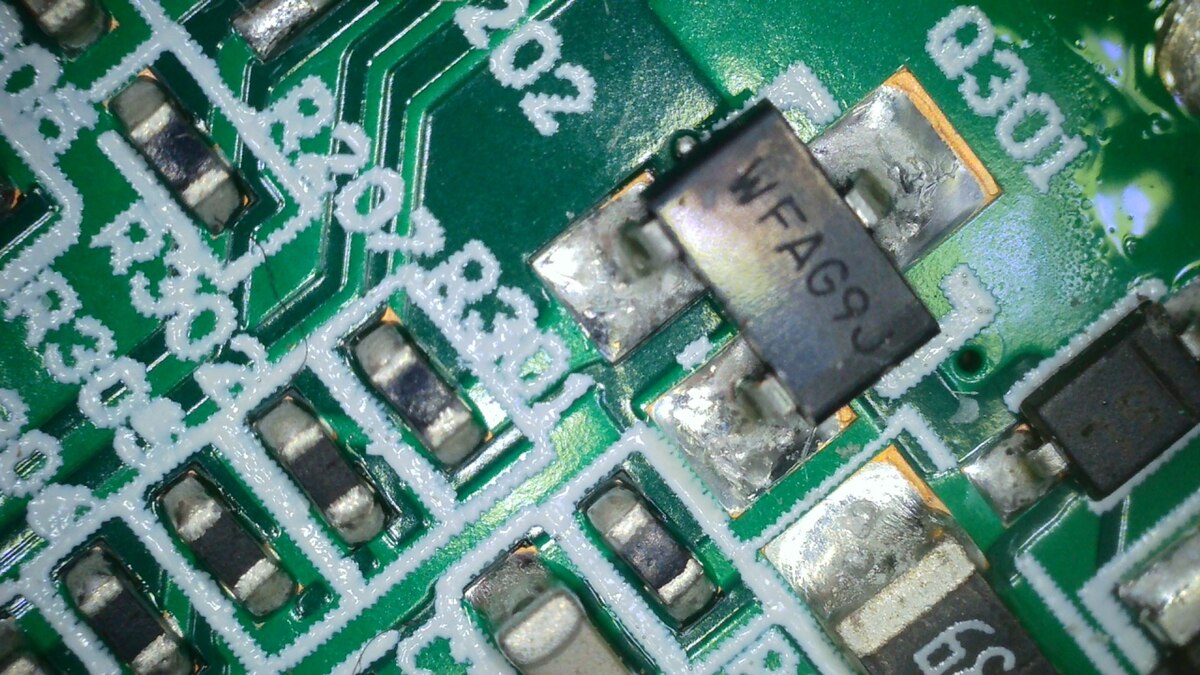
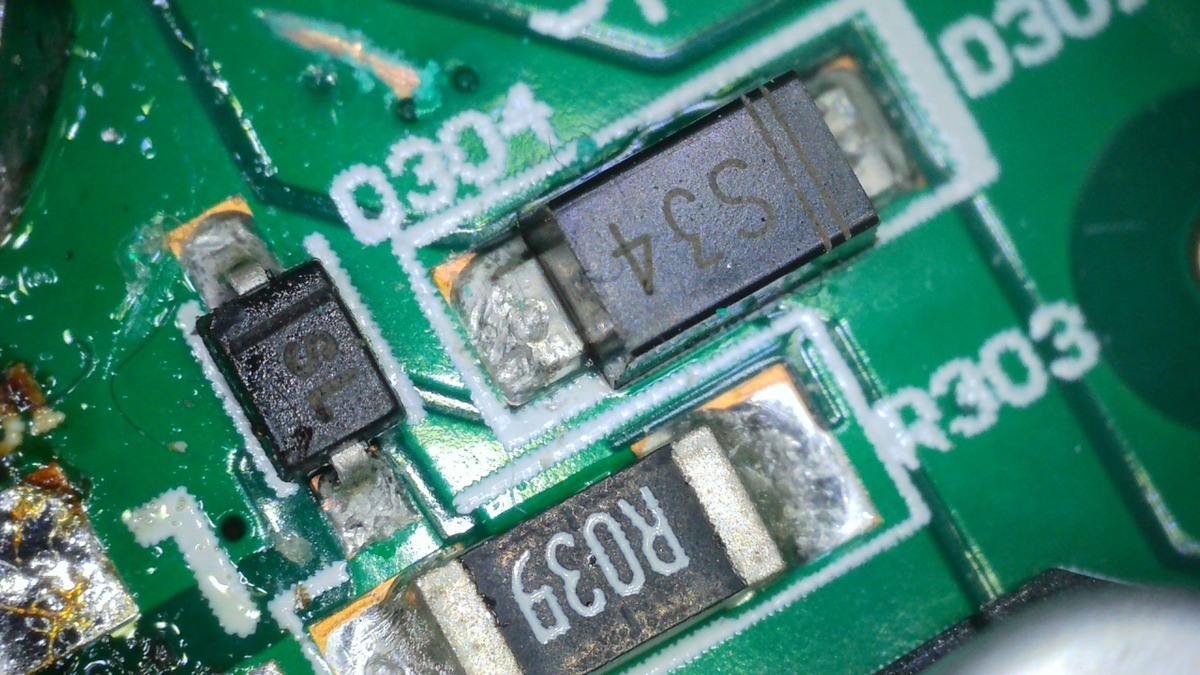
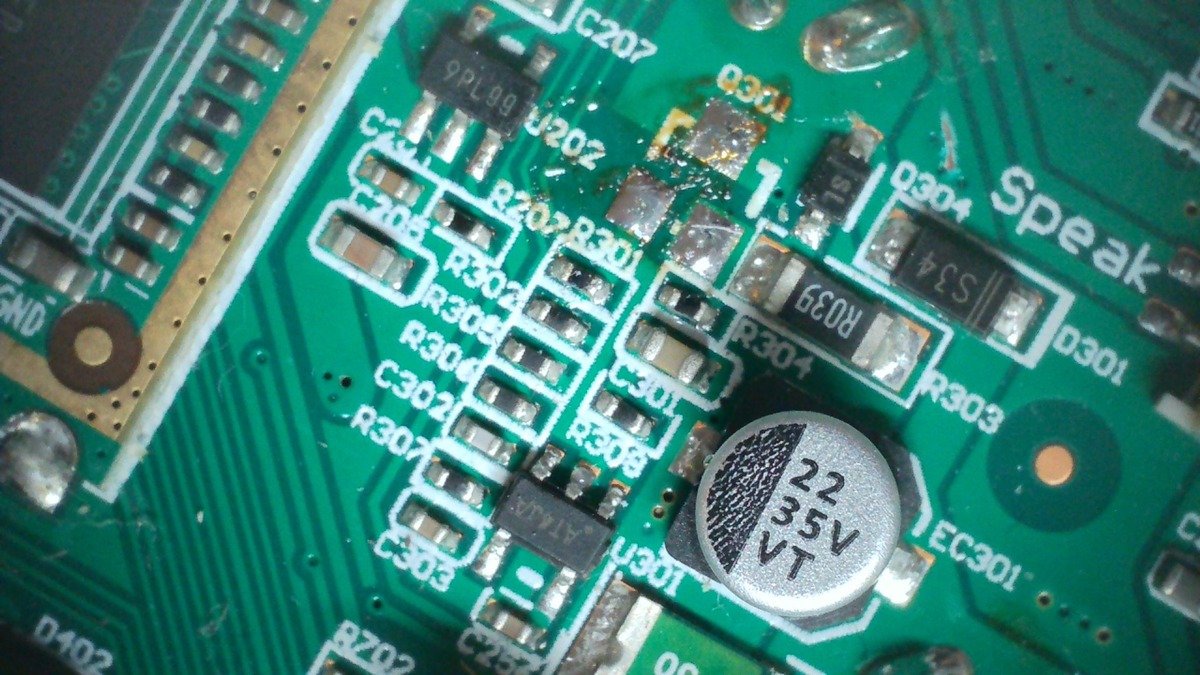
H. H. schrieb: > Sebastian B. schrieb: >> SOT-23 Marking WFAG9J > > Zeig mal. > > Und ebenso die beiden Dioden.
Sebastian B. schrieb: > Bei Q301 messe ich 40 Ohm zwischen Drain und Source. Der ist also > hinüber. Ungwöhnlich hoch, eigentlich legieren die durch. > Nach Abbauen des Motors und Auslöten von Q301 (SOT-23 Marking WFAG9J) > zeigen D301 und D302 je 180mV beim Diodentest, dürften also intakte > Schottky-Dioden sein. Trotzdem wäre die Freilaufdiode ein Kandidat. > Batteriespannung beträgt 16V > (unbelastet). Der Motor selbst dreht und klingt am Labornetzteil bei 16V > normal und nimmt 55mA auf. Sollte also OK sein. Kommt mir für den Motor eines Saugrobotor etwas wenig vor. > Mit max. 20V Drain-Source Spannung ist der IRLML6244 vielleicht auch ein > bisschen zu empfindlich... Habt ihr Vorschläge, was man stattdessen > verwenden sollte? Sollte ich noch etwas ganz anders prüfen, bevor ich > weitere Mosfets opfere? :-) Miss mal die Spannung über dem Motor mit einem Oszi, Motor in die Schaltung eingebaut.
Angehängte Dateien:
-

seitenbuerste.png
390 KB
Jörg R. schrieb: > Sebastian B. schrieb: >> Der Motor selbst dreht und klingt am Labornetzteil bei 16V >> normal und nimmt 55mA auf. Sollte also OK sein. > > Kommt mir für den Motor eines Saugrobotor etwas wenig vor. Ist nur für die langsam drehende Seitenbürste.
Leider fällt mir zum Marking des MOSFET nichts ein. Und eine 3A/40V Schottkydiode als Freilaufdiode passt so gar nicht zu dem lächerlich kleinen Motor. Versuchs mal mit einem AO3400A. Man könnte auch noch testen ob der Gatetreiber dick genug ist, statt des MOSFET einen 1nF Kondensator einbauen und mit dem Oszi das Signal anschauen.
H. H. schrieb: > Man könnte auch noch testen ob der Gatetreiber dick genug ist, statt des > MOSFET einen 1nF Kondensator einbauen und mit dem Oszi das Signal > anschauen. Das Gate wird aktuell von einem 3.3V Signal durch einen 10kOhm(!) Widerstand getrieben. Das scheint eher nicht auf schnelle Schaltzeiten optimiert zu sein. Ist bei dem geringen Strom scheinbar egal, lief ja jahrelang so. Bilder von der Spannung am Motor kommen gleich. Sebastian
Angehängte Dateien:
-

motor.png
43 KB -

mosfet.png
49 KB


Habe einen neuen IRLML6244 eingelötet und den Staubsauger in Betrieb genommen. Anbei die Spannung am Motor: motor.png: Oszi-Masse an Motor-, Messspitze an Motor+ mosfet.png: Oszi-Masse an Schaltungsmasse (Batterie-), Messspitze an Mosfet Drain. Schaut für mich sehr gesittet aus, keinerlei Spitzen. Wahrscheinlich dank der 10kOhm am Gate. Aber die 17.4V, die das Oszi maximal über der Drain-Source Strecke gemessen hat, sind halt ein bisschen grenzwertig.
Sebastian B. schrieb: > Das Gate wird aktuell von einem 3.3V Signal durch einen 10kOhm(!) > Widerstand getrieben. Irre viel! Kein Wunder, dass der MOSFET kaputt geht, damit kommst du beim Anlauf raus aus der SOA.
Habe nun den Q301 durch einen DMN3404L ersetzt (30V Vds max.) und zu D301 noch eine 1N5819 parallel geschaltet. Mal schauen wie lange die Reparatur diesmal hält… 4 Tage ist der Roboter bisher gelaufen ohne wieder auszufallen. SOA dürfte eigentlich kaum ein Problem sein, da der Motorstrom so gering ist. Habe das ganze mal im Ltspice simuliert. Die Verlustleistung am MOSFET ist zu keiner Zeit über 250mW (Zahl aus dem Gedächtnis).
Angehängte Dateien:
-

ltspice.png
45 KB -

soa.png
140 KB
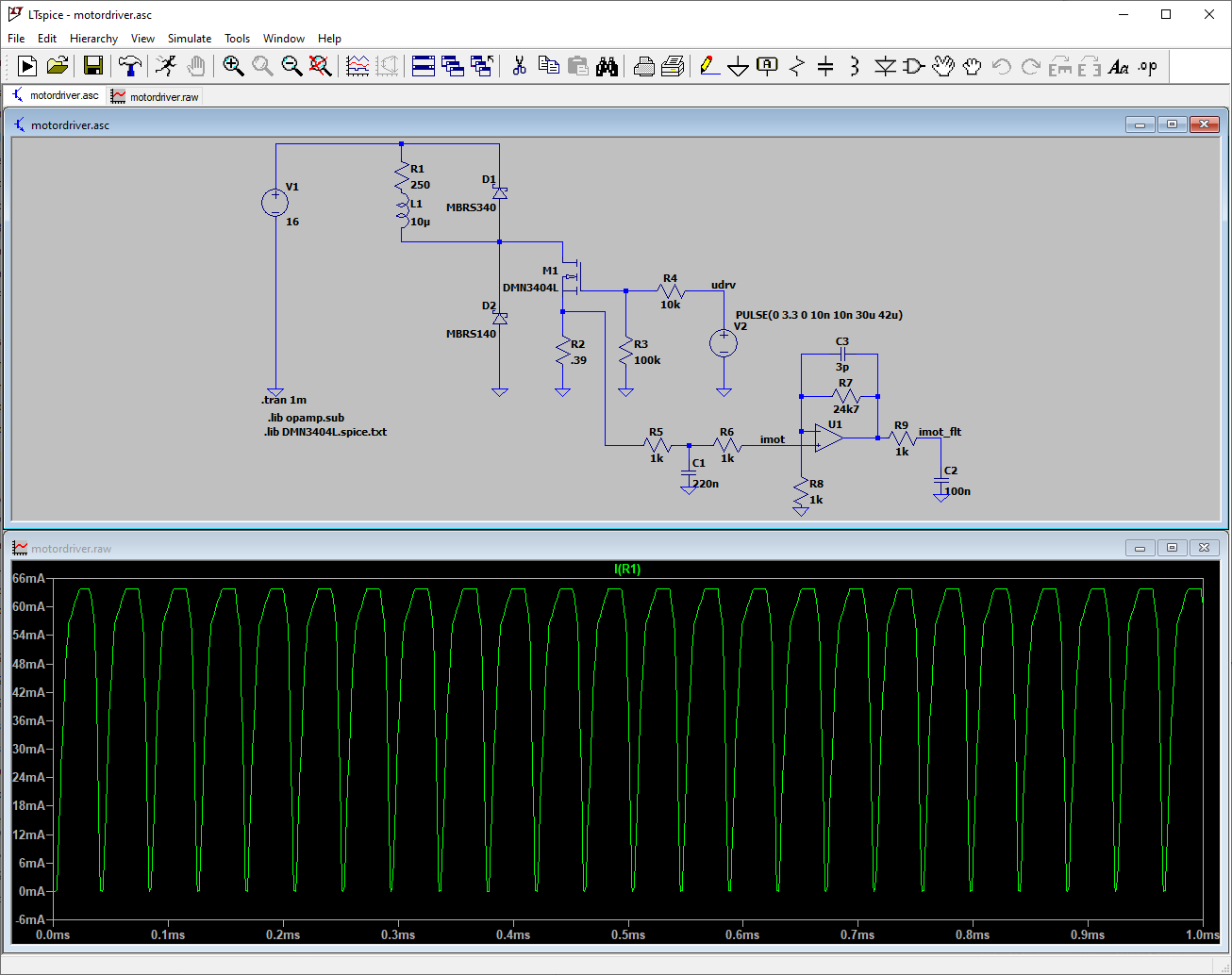
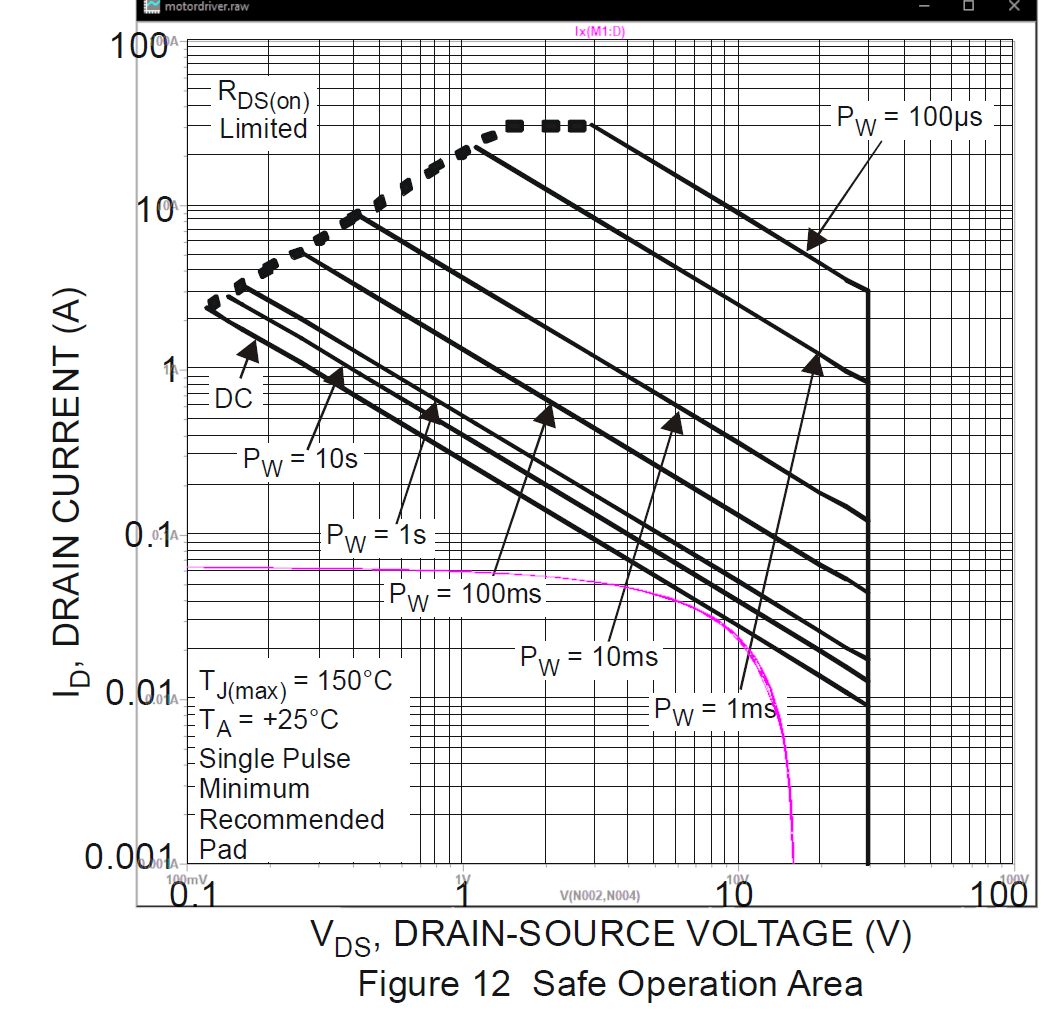
Habe spaßeshalber mal versucht, die ganze Schaltung in LTSpice zu simulieren und dabei das SOA nachzubilden. R1+L1 sollen den Motor darstellen. In soa.png habe ich Strom- und Spannung aus LtSpice (pink) dem SOA-Digramm aus dem DMN3404L Datenblatt überlagert. Schaut soweit gut aus. Natürlich habe ich keine Ahnung, wie realistisch die LtSpice-Simulation und vor allem mein L+R Motor-Modell ist...
Sebastian B. schrieb: > SOA dürfte eigentlich kaum ein Problem sein, da der Motorstrom so gering > ist. Wenn die Bürste freiläuft, vermutlich richtig. Aber da wickeln sich gerne mal Fäden rum oder es sammelt sich Dreck ums Lager, dann ist der Anlauf schon deutlich schwieriger.
Matthias S. schrieb: > Sebastian B. schrieb: >> SOA dürfte eigentlich kaum ein Problem sein, da der Motorstrom so gering >> ist. > > Wenn die Bürste freiläuft, vermutlich richtig. Aber da wickeln sich > gerne mal Fäden rum oder es sammelt sich Dreck ums Lager, dann ist der > Anlauf schon deutlich schwieriger. Stimmt natürlich. Es gibt über den Opamp U301 zwar einen Pfad zur Strommessung, aber ob der Mikrocontroller, der dahinter irgendwo kommt, schnell genug reagiert, um den MOSFET bei blockiertem Motor zu retten? Vmtl. eher nicht. Wenn es nicht so viele Schrauben wären, um den blöden Roboter zu zerlegen, würde ich das ja einfach mal ausprobieren und ggf. den dann ermordeten MOSFET nochmal tauschen... Vielleicht geht der Roboter ja von alleine nochmal kaputt und ich muss sowieso wieder dran :-) Sebastian
Seit heute dreht die Seitenbürste wieder dauerhaft, also ist der nächste MOSFET gestorben. Es würde mich ja schon interessieren, was da ursprünglich für ein Transistor verbaut war. Der 10kOhm Vorwiderstand macht für mich weder für Bipolartransistor noch für MOSFET Sinn. Damit der nächste Transistor hoffentlich etwas länger lebt, würde ich als Nächstes den Gate-Widerstand verkleinern. Wie wären 470 Ohm || 10nF? Ich muss ja keine EMV-Tests bestehen, nur den Transistor möglichst in seiner SOA halten. Da ich den Roboter sowieso wieder zerlegen muss, kann ich auch gleich mal probieren, ob die Strommessung um U301 überhaupt funktioniert und irgendeinen Effekt hat. Wenn der Schaltungsteil nicht geht, könnte das auch das Ableben des Transistors beschleunigen. Sebastian
Sebastian B. schrieb: > Der 10kOhm Vorwiderstand macht für mich weder für Bipolartransistor noch > für MOSFET Sinn. Vielleicht ein Darlington-Transistor Ich würde ihn auf 1k verringern. Sonst nichts ändern.
Monk schrieb: > Vielleicht ein Darlington-Transistor Finde zwar vom Marking trotzdem nichts in der Richtung, aber ein BCV47 verträgt 80V und max. 500mA (Peak 800mA). Gibts für ein paar ct bei Reichelt und wäre einen Versuch wert.
Matthias S. schrieb: > Sebastian B. schrieb: >> SOA dürfte eigentlich kaum ein Problem sein, da der Motorstrom so gering >> ist. > > Wenn die Bürste freiläuft, vermutlich richtig. Aber da wickeln sich > gerne mal Fäden rum oder es sammelt sich Dreck ums Lager, dann ist der > Anlauf schon deutlich schwieriger. Matthias S. schrieb: > Sebastian B. schrieb: >> SOA dürfte eigentlich kaum ein Problem sein, da der Motorstrom so gering >> ist. > > Wenn die Bürste freiläuft, vermutlich richtig. Aber da wickeln sich > gerne mal Fäden rum oder es sammelt sich Dreck ums Lager, dann ist der > Anlauf schon deutlich schwieriger. Hast Du mal gemessen, was der Motor im blockierten Zustand verbraucht? Alternativ DC-Widerstand des Motors messen. Die Bürste hängt öfter mal, wenn der Robi über einen dicken Teppich fährt. Mein Roomba merkt das und zeigt ein Bürstensymbol an. Vielleicht ist bei Dir die Strommessung über den Shunt defekt?
Fritz G. schrieb: > Hast Du mal gemessen, was der Motor im blockierten Zustand verbraucht? > Alternativ DC-Widerstand des Motors messen. Die Bürste hängt öfter mal, > wenn der Robi über einen dicken Teppich fährt. Mein Roomba merkt das und > zeigt ein Bürstensymbol an. Vielleicht ist bei Dir die Strommessung über > den Shunt defekt? Das habe ich gerade gestern probiert. Wenn ich den Motor blockiere, fällt am 39mOhm Shunt R303 (im Schaltplan ganz oben in Eingangspost falsch mit 390mOhm beschriftet) 18mV ab. Sollte also grob gerundet 18mV/30mOhm=0.5A sein. Wenn ich den Motor für ca. 1-2s blockiere, wird er für einige Sekunden abgeschaltet (u_drv=0V), danach wieder für 1s an etc... Der Transistor muss also die 0.5A (bei 50% Tastverhältnis) für mindestens einige Sekunden vertragen, bevor die Strombegrenzung greift. Das Tastverhältnis scheint sich nicht groß zu ändern. Sebastian
Hoffentlich finales Update: Mit einem SI2356DS-T1-GE3 MOSFET (40V max. Uds) und 820 Ohm Gatewiderstand läuft der Roboter jetzt seit mehreren Wochen problemlos. Kein weiteren Ausfälle. Sebastian
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.