Hallo zusammen,
das Alarmsignal soll zuerst sehr leise ertönen und dann, wenn nicht
quittiert wird, schon lauter.
Ich habe jetzt alles, was nicht zum Thema gehört, aus dem Code entfernt
und ihn hoffentlich so weit wie möglich reduziert. Selbst das
Quittieren/Ausschalten steht jetzt nicht im Code. Die beigefügte
selbsterklärende Audiodatei soll die spärlichen Annotationen
kompensieren.
Allerdings würde ich gerne jemanden bitten, den Code kostenlos zu
überprüfen, vielleicht kann er noch kompakter gemacht werden.
Es ist nicht dringend, es kann warten.
Georg M. schrieb:> Allerdings würde ich gerne jemanden bitten, den Code kostenlos zu> überprüfen, vielleicht kann er noch kompakter gemacht werden.> Es ist nicht dringend, es kann warten.
Wenn er funktioniert, für dich verständlich und wartbar ist und die für
dich wichtigen Anforderungen erfüllt, muss er dann wirklich kompakter
werden?
Georg M. schrieb:> vielleicht kann er noch kompakter gemacht werden.
Lass das lieber sein. Damit riskierst du nur, dass er schlechter
lesbar/wartbar wird.
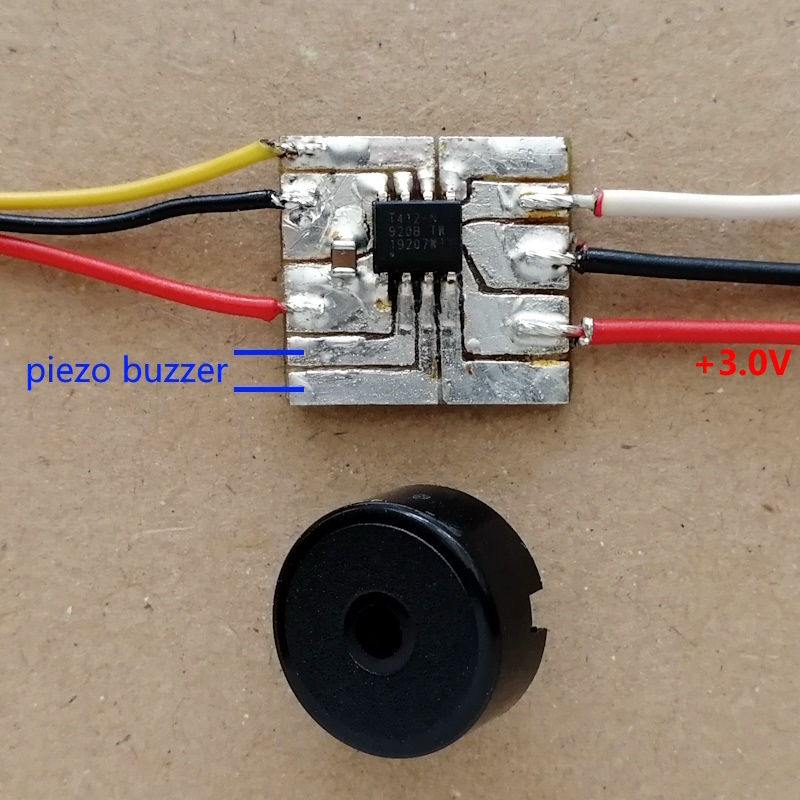
Wenn das Pizoteil direkt angeschlossen wird, können im spannungslosen
Zustand hohe Spannungen am Pizo entstehen.(klopfen auf das Gehäuse)
Kann das den IC zerstören?
MfG
alterknacker
Al. K. schrieb:> Kann das den IC zerstören?
Unwahrscheinlich. Die Spannung wir von den internen ESD Schutzdioden auf
die VCC/GND Pins abgeleitet, wo sich eine Batterie oder wenigstens ein
Kondensator befinden sollte, der die Energie aufnimmt.
Al. K. schrieb:> Wenn das Pizoteil direkt angeschlossen wird, können im spannungslosen> Zustand hohe Spannungen am Pizo entstehen.
Dafür ist die Quellimpedanz viel zu hoch.
Rainer W. schrieb:> Dafür ist die Quellimpedanz viel zu hoch.
Normalerweise ja, aber gesetzt den Fall, der AVR wird direkt nach dem
Einschalten gebootet und man haut gleichzeitig kräftig mit der Faust auf
die Tischplatte, dann rappelt's und rummst es aber ganz schön ordentlich
im Karton!
👊💥⚡
Walter T. schrieb:> Ich habe nicht verstanden, wie das mit dem leiser und lauter> funktionieren soll.
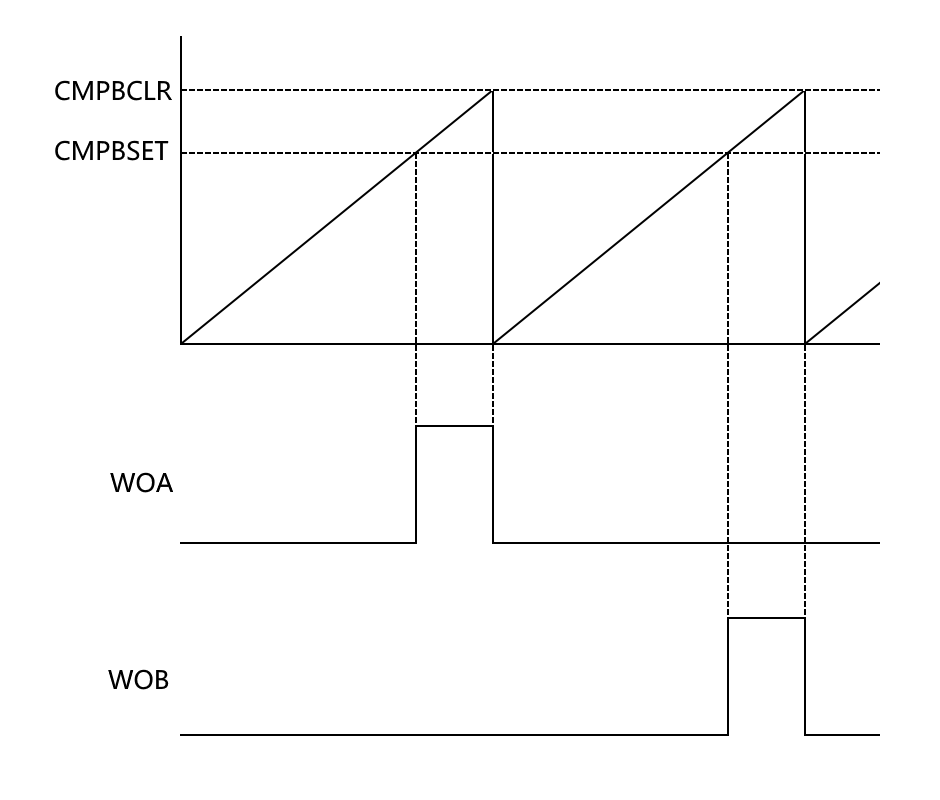
1. Wenn du ihn gar nicht ansteuerst, dann ist er ganz leise.
2. Wenn du ihn mit 50/50 im Gegentakt ansteuerst, dann ist er am
lautesten.
Und mit passender Ansteuerung kannst du jetzt die Bereiche dazwischen
erreichen. Obacht: die Lautstärke verhält sich nicht proportional zum
TV.
Marcel V. schrieb:> man haut gleichzeitig kräftig mit der Faust auf die Tischplatte, dann> rappelt's und rummst es aber ganz schön ordentlich im Karton!
Ich hab mal ausproiert, einen µC mit so einem Ding zu versorgen. Fazit:
funktioniert nicht. Und hohe Spannungen/Energien egeben sich nur bei
Piezo-Stacks:
- https://www.sciencedirect.com/science/article/pii/S2590174522000824
Lothar M. schrieb:> Und hohe Spannungen/Energien egeben sich nur bei Piezo-Stacks:
Was ich damit sagen wollte ist, dass die Eingangsimpedanz im Bootmodus
ebenfalls hoch ist, so dass die Spannung im Erschütterungsfall gegen
Unendlich ansteigen kann. Abhilfe schafft ein 4k7 Widerstand parallel
zum Piezzo!
Lothar M. schrieb:> Und mit passender Ansteuerung kannst du jetzt die Bereiche dazwischen> erreichen.
Das muss ich heute abend mal ausprobieren. Bislang ging ich davon aus,
dass bei den zig Nanofarad der Tastgrad/DC-Offset fast keinerlei
Auswirkungen auf die Lautstärke hat.
Marcel V. schrieb:> Was ich damit sagen wollte ist, dass die Eingangsimpedanz im Bootmodus> ebenfalls hoch ist
Die Eingangsimpedanz des Pins wird wegen der Schutzdioden "automatisch"
niedrig, sobald Vcc+0,3V oder GND-0,3V erreicht werden. Denn die
Schutzdioden sind auch bei hochohmigem Ein- und Ausgängen wirksam.