Hallo zusammen,
ich habe wenig mit Elektrotechnik am Hut, versuche aber gerade eine Art
Schaltplan für eine CNC Fräse zu bauen.
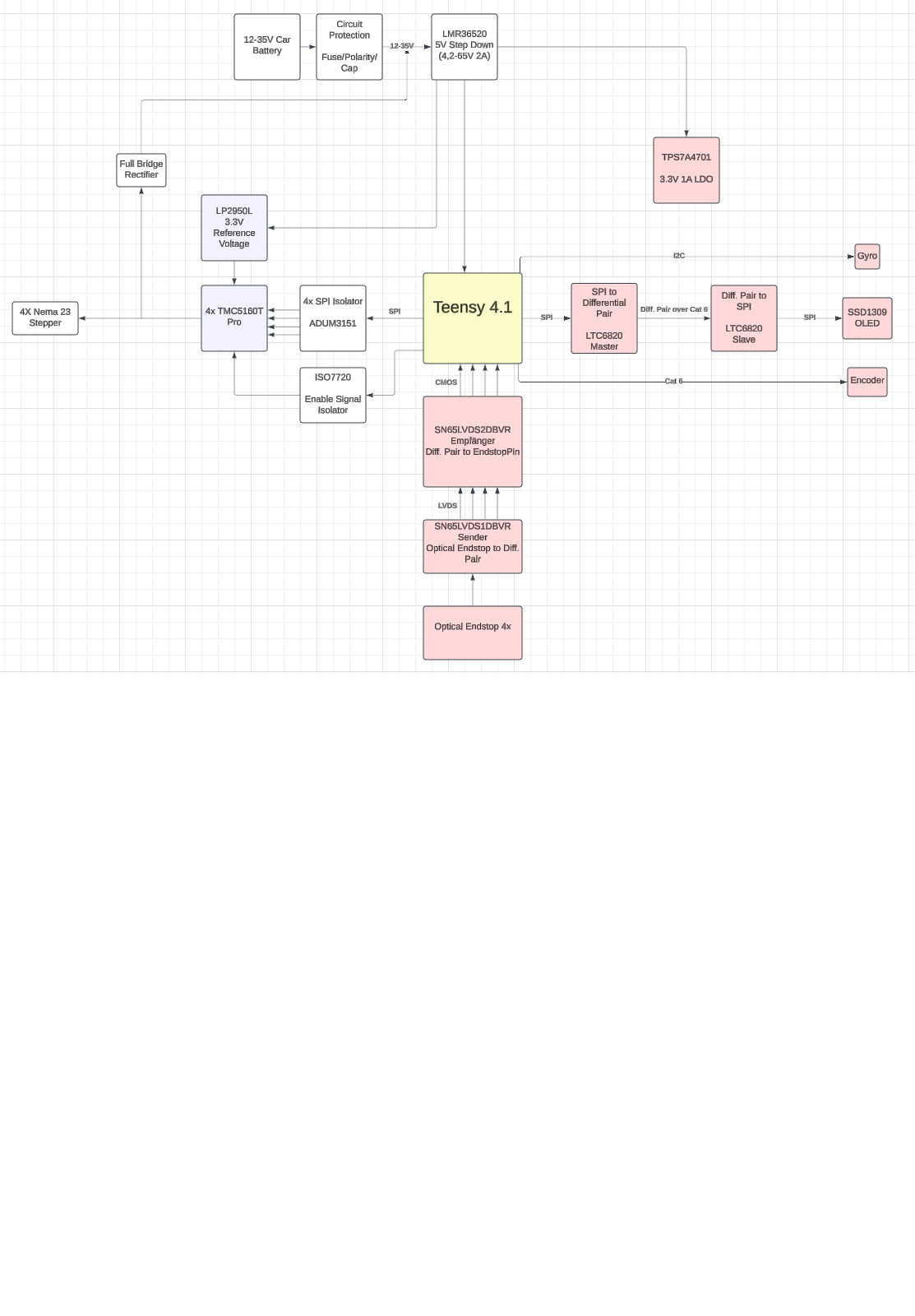
4 Schrittmotoren werden über Treiber angesteuert. Ich hatte bereits eine
Platine dazu Bestücken lassen, hatte allerdings Probleme, weil mir die
Schrittmotor Treiber die SPI Signale der Logiksteuerung zerschossen
haben.
Der Plan ist, die Spannung an den Schrittmotoren (brauchen VCC und 3.3V)
möglichst von der Logiksteuerung (Microcontroller + Peripherals) zu
trennen.
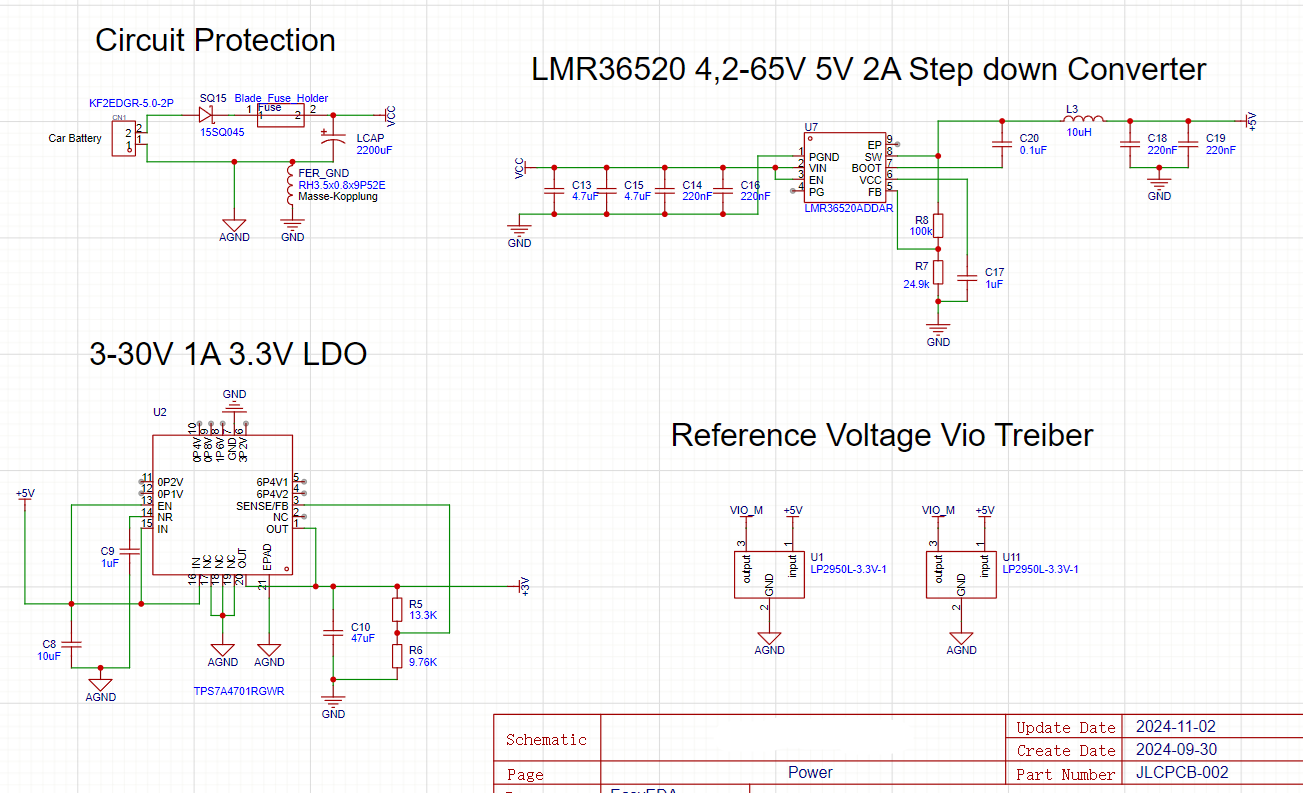
Deshalb zwei 3.3V Spannungswandler. Die beide von einem 5V Buck
converter gefüttert werden.
Die Massen AGND ("dreckige Masse") und GND ("saubere Masse") werden an
einem Punkt über einen Ferritkern nah an der Eingangsspannung gekoppelt.
Zusätzlich soll am PCB die "Dreckige" Treiberseite und "saubere"
Logikseite separiert werden und mit den jeweiligen Ground Planes
versehen.
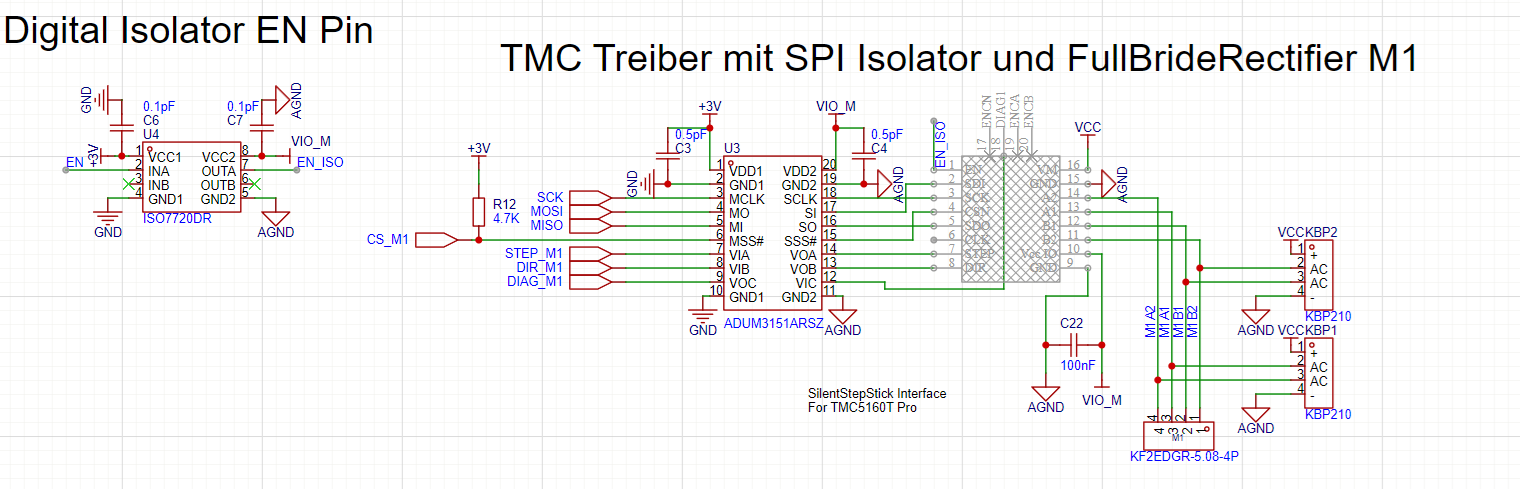
Signale zur "Dreckigen" Treiberseite laufen über Signalisolatoren.
Ich habe wenig Erfahrung und wollte euch Experten mal fragen, ob das so
umsetzbar sein könnte, oder ob man Vorsorglich (bspw. in der
Spannungsversorgung) etwas ändern kann?
Danke für eure Hilfe!
(und sorry falls ich jegliche Regeln im Schaltplan zeichnen verletzt
habe... Gerne auch hier Tipps!)
Viele Grüße
Yannik
Angehängte Dateien:
-

Block-Diagramm.png
79 KB -

Power_Scematic.png
200 KB -

Treiber_Scematic.png
150 KB -

Block_diagram.png
75 KB
Yannik schrieb: > ich habe wenig mit Elektrotechnik am Hut, Ja. Und gehst zielgenau auf die modernsten aber auch am schwierigsten zu beherrschenden Komponenten ein, für deren Beherrschung andere jahrelang Elektronikentwicklung lernen. Eklatante Fehler sind die KBP210 Brückengleichrichter, viel zu langsame Dioden drin und die Spule über du die die GND trennen willst, man nutzt eher Kondensatoren um die Störungen der ADUM abzublocken. Ansonsten hoffe ich mal, dass du für jedes IC eine fertige Platine nutzt, denn eigene Platinen für 10uH Schaltregler sind zum scheitern verurteilt. 0.1pF Kondensatoren sind hoffentlich Nachlässigkeit. Kurz gesagt: du bist noch Jahre entfernt 'mal eben' so eine Schaltung aufzubauen. Nutze was fertiges.
Angehängte Dateien:
-

lmr36520_datasheet.png
67 KB
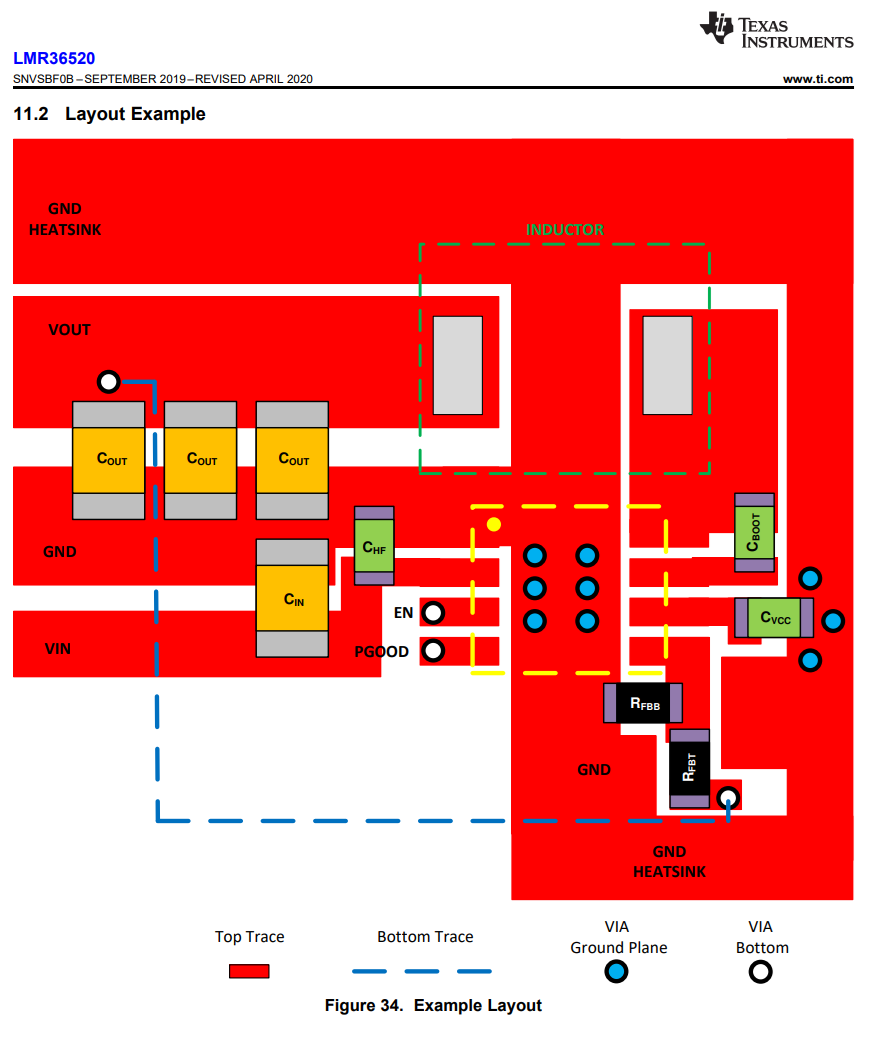
Ich bin hier weil ich etwas von kompetenten Leuten lernen will und auf diese Komponenten bin ich eben gestoßen. Mit meinen Recherchen bin ich an mein Limit gekommen, deswegen hier die Frage. Darf man sich nicht an anspruchsvolle Projekte trauen, nur weil man etwas nicht studiert hat? Ich habs ohne diese ICs versucht, und es hat nur mittelmäßig weil in das SPI Signal lauter Störungen gestreut wurden. Meinst du die 10uH Schaltregler gehen auch schief wenn man sich an das PCB Layout im Datenblatt hält / siehe Anhang? Okey ansonsten hier einen fertigen Spannungwandler, danke :) Die 0.1pF waren tatsächlich Nachlässigkeit - 0.1uF sollten es sein (laut Datenblatt) - danke! Die KBP210 sollen nur den Strom umleiten, der erzeugt wird wenn man die Motoren von Hand bewegt, hat in der ersten Version eigentlich sehr gut funktioniert und meine Schrittmotor Treiber geschützt. Aber auf die könnte man theoretisch auch verzichten. Was gäbe es denn fertiges auf Arduino Basis? Habe dazu nämlich nichts gefunden, dass meine alle meine Peripherals verarbeiten kann.
Yannik schrieb: > Meinst du die 10uH Schaltregler gehen auch schief wenn man sich an das > PCB Layout im Datenblatt hält Ja. Auch die Bauteilauswahl ist entscheidend, von welchem Hersteller z.B. die 10uH Spule stammt mit welchen Nebenwerten, vor allem Resonanzfrequenz, sie da steht. Yannik schrieb: > Ich habs ohne diese ICs versucht, und es hat nur mittelmäßig weil in das > SPI Signal lauter Störungen gestreut wurden. Nicht verwunderlich, eben weil dir Erfahrung fehlt. Aber mit hochgezüchteteren IC werden die Probleme nicht kleiner. Es führt kein Weg drumrum: du musst erst lernen, was die Störungen erzeugt, und wie man sie vermeidet.
Michael B. schrieb: > Es führt kein > Weg drumrum: du musst erst lernen, was die Störungen erzeugt, und wie > man sie vermeidet. Genau und das habe ich schon herausgefunden. Die TMC5160T Pro Schrittmotortreiber erzeugen ein Rauschen auf den 3.3V (das je nach Back EMF der Stepper unterschiedlich stark ist). Entweder durch den VIO oder durch die Steuersignale des SPI. Deshalb versuche ich das zu isolieren. Denn an den Platinen der TMC Treiber kann ich natürlich nix ändern. Es variiert auch je nach Hersteller (Fly sind deutlich sauberer, als die von BigTreeTech). (https://meltbro.de/mellow-fly-tmc5160-pro-24v-48v-hv-schrittmotortreiber-spi-driver-zb-voron-2-4-trident-v01-xy-achse.html) Das ganze konnte man am Osci sehen (mit SPI Datenanalyse). Waren die Treiber deaktiviert - Sobald die Stepper Strom ziehen / sich bewegen fängt es an. Filtern geht mMn auch nicht. Spektrumanalyse auf dem 3.3V Signal hat keine klar identifizierbare Frequenz hergegeben. Quasi WhiteNoise zunehmend bei den tiefen Frequenzen. Falls du eine Idee hast, außer sie Spannungstechnisch (und über ADUM / ISO) zu isolieren, gerne her damit! - Dafür bin ich hier! :) Ich kann mir auch neue Dinge beibringen, falls jemanden richtigen Input hat. Natürlich ersetzt das kein Studium - aber ganz auf den Kopf gefallen bin ich nicht
Yannik schrieb: > Fly sind deutlich sauberer Leider verlinkt die Seite kein Manual. Dass die 3.3V verrauscht sind, stammt wohl daher, dass sie die 3.3V selbst erzeugen und dabei keine eigene Masse nutzen. Das Rauschen ist die Folge der stealth-Technik von Trinamic. Es spielt für die Ansteuerung mit Digitalsignalen aber keine Rolle, die Störungen werden geringer sein als die Steuersignalpegel.
@ Yannic Der Feedbak (Pin 5) vom LMR36... gehört nach dem L. Sonst wirds nix mit dem Feedbak.
Thomas S. schrieb: > @ Yannic > Der Feedbak (Pin 5) vom LMR36... gehört nach dem L. Sonst wirds nix mit > dem Feedbak. Stimmt, Danke! Habe auch genau die gleiche Spule gefunden wie im Datenblatt. und das PCB Layout mal danach gemacht Michael B. schrieb: > Leider verlinkt die Seite kein Manual. So ein richtiges Manuel habe ich auch schon gesucht. Es gibt noch ein Datenblatt noch ein "Schaltplan" https://github.com/Mellow-3D/Fly-Drivers/blob/master/5160/Fly-5160-Schematic%20(stepstick).pdf Die Treiber operieren (bei mir) ohne Stealth, dafür mit Spreadcycle weil ich die Stallguard/CoolStep Funktion brauche. Ist aber natürlich auch ein Chopper. Am SPI sieht man's halt. Treiber Deaktiviert, Display (auch über SPI) läuft Problemlos - Treiber Enable - Display hat Störungen. Auch Sind bei den Daten von den Treibern (Stallguard und Diagnose) auffällig viele 0en mit dabei. Sieht nach aussetzern aus. Weiß jemand ob man den ADUM3151 so gebrauchen kann?
@Yannik Deine beiden ByPass - Kondensatoren C3/C4 am ADU... sind laut Datasheet falsch. Dort steht zwischen 0,01 - 0,1 uF. Du hast hier pF .
Thomas S. schrieb: > Deine beiden ByPass - Kondensatoren C3/C4 am ADU... sind laut Datasheet > falsch. > Dort steht zwischen 0,01 - 0,1 uF. Du hast hier pF . Stimmt danke! Das habe ich bereits geändert. Wie siehts mit dem 3.3V LDO aus?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.