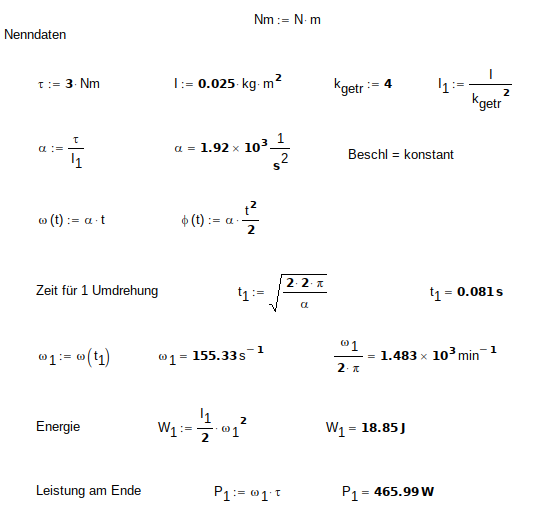
Hallo! - Ich habe einen Schrittmotor mit τ = 3Nm - Damit möchte ich einen Rotationskörper beschleunigen dessen Trägheitsmoment 0.025kgm² beträgt. - Dazu gibt es ein 1:4 Getriebe, das heißt das auf der Motorseite sichtbare Trägheitsmoment ist 1/16 (I = 0.0015625 kgm²) Jetzt möchte ich wissen wie viel Energie in dem System ist nach einer Umdrehung an der Motorwelle. Winkelbeschleunigung: α = τ / I -> 1920rad/s² Die kinematische Gleichung für die gleichmäßig beschleunigte Drehbewegung: θ=0.5αt² Drehwinkel für eine vollständige Umdrehung: θ= 2πrad Umstellen nach der Zeit t: t = (2θ /α)^0.5 -> (4π/1920)^0.5 = 0.081s Winkelgeschwindigkeit: ω = αt -> 155.52 rad/s Energie: E = 0.5 I ω² I = 0.025kgm² und ω = 155.52rad/s / 4 (1/4 wegen der Untersetzung) E = 18.9 J Die benötigte Leistung um 18.9 Joule in 0.081 Sekunden aufzubringen, beträgt 233,68 Watt Der reale Motor hat seinen Leistungspeak von nur 100W bei 1000rpm. Das Problem bei der Berechnung ist dass die Drehzahl rein Mathematisch nach der kurzen Zeit schon bei 1485 U/min liegt, was nicht realistisch ist da der Motor hier kaum noch Drehmoment hat. Ab ca. 100 U/min fällt dieses ab. Grundsätzlich würde ih gerne wissen ob der Weg dies zu berechnen nicht schon deshalb falsch ist weil die Massenträgheit des Motors selber nicht berücksichtigt wird? Wäre für ein paar aufklärende Worte dankbar.
A. B. schrieb: > Grundsätzlich würde ih gerne wissen ob der Weg dies zu berechnen nicht > schon deshalb falsch ist weil die Massenträgheit des Motors selber nicht > berücksichtigt wird? Grundsätzlich ist die Berechnung schon deshalb falsch, weil 3 Nm das Kippmoment (also Stillstand) und nicht das Moment über den gesamten Drehzahlbereich ist. Bei der Grenzdrehzahl ist das Antriebsmoment Null. Damit hast Du keine konstante Beschleunigung mehr. Aber ja: Für die Berechnung der Beschleunigung benötigst Du sowohl das Trägheitsmoment des Motors als auch das Ersatzträgheitsmoment des gesamten Antriebsstrangs bezogen auf die Motorwelle. Je nach Massenverhältnissen kann man das Getriebe vernachlässigen oder auch nicht.
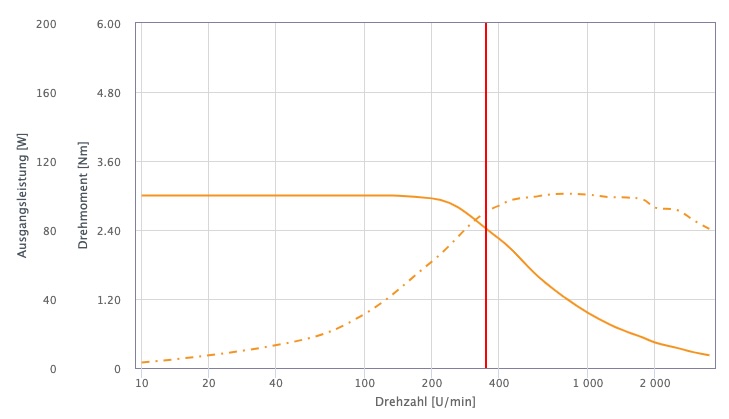
A. B. schrieb: > Anbei ein Bild von der Drehmomentkennlinie. Wenn Drehmoment x Drehzahl = Leistung ist, dann sollte die Leistung auch linear mit der Drehzahl steigen (bis 250rpm). * Die Kurve sieht aber anders aus. Warum? * wie groß ist das Trägheitsmoment der Motors? * wie groß ist das Trägheitsmoment des Getriebes (auf welcher Seite)?
A. B. schrieb: > Ich habe einen Schrittmotor mit τ = 3Nm Haltemoment; ab 50-100rpm gehts abwärts; je nach Spannung schneller oder langsamer; für Tests kann man durchaus auch auf 100-200V gehen, wird mit Treibern nur schwieriger; Spezifikation ist aber oft nur 48V A. B. schrieb: > Der reale Motor hat seinen Leistungspeak von nur 100W bei 1000rpm. 100W Wellenleistung bei 1000rpm wären nur noch 0.95Nm. A. B. schrieb: > Grundsätzlich würde ih gerne wissen ob der Weg dies zu berechnen nicht > schon deshalb falsch ist weil die Massenträgheit des Motors selber nicht > berücksichtigt wird? Massenträgheit des Rotors könnte so um 850gcm² sein. Das könnte man gegenüber den 15625gcm² für den Rotationskörper+Getriebe und im Rahmen der übrigen Fehler fast untern Tisch fallen lassen. Getriebeverluste etc. fehlen auch noch. In Summe müsstest du eher mit I = 0.002 kgm² rechnen. Bei 0rpm also 1500rad/s² Aber die ganze Überlegung ist eigentlich Käse, weil du die Schrittgeschwindigkeit über ne geeignete Rampe (mit Sicherheiten) vorgeben musst. z.B. - bis 200rpm: 1300rad/s² - 200-300rpm: 550rad/s² + 150.000rad/s² / Drehzahl in rpm - darüber: 150rad/s² + 270.000rad/s² / Drehzahl in rpm
Giovanni schrieb: > Die Kurve sieht aber anders aus. Warum? Könnte schon grob linear sein. Ist halt die logarithmisch skalierte x-Achse.
Angehängte Dateien:
-

m1.png
27 KB
logarithmische Skalierung ist cool. Also. * Das Drehmoment ist nicht konstant, daher ist die 1. Überlegung nicht richtig. * Ich nehme an, dass die Kurven für stationären Betrieb gelten. Wir reden hier aber von einem Zeitbereich von -zig Millisekunden. Kann die Regelung das? * Wenn mas etwas berechnen will, wären die Kennlinie als Datenreihe nicht schlecht. Die beiliegende Rechnung bezieht sich auf konstantes Moment - was nicht stimmt. Anm: Die Leistung steigt mit der Drehzahl!
Stephan schrieb: > In Summe müsstest du eher mit I = 0.002 kgm² rechnen. Bei 0rpm also > 1500rad/s² > > Aber die ganze Überlegung ist eigentlich Käse, weil du die > Schrittgeschwindigkeit über ne geeignete Rampe (mit Sicherheiten) > vorgeben musst. > z.B. > - bis 200rpm: 1300rad/s² > - 200-300rpm: 550rad/s² + 150.000rad/s² / Drehzahl in rpm > - darüber: 150rad/s² + 270.000rad/s² / Drehzahl in rpm Grob numerisch ermittelt: - 1 Umdrehung mit maximaler Rampe braucht 0.117s - Geschwindigkeit am Ende 850rpm bzw 89.2rad/s - aufgewendete mechanische Arbeit (I = 0.002 kgm²) ca. 8J - mechanische Leistung im Mittel 68W - 300rpm werden nach ca. 0.0255s erreicht - mechanische Leistung ab 300rpm im Mittel 76W Dürfte grob passen. Wobei ich für ein echtes Gerät die Reserven höher machen würde, also die Rampe insgesamt nochmal ca. 30% langsamer. Und die Rampe an sich natürlich nochmal prüfen und ggf. verfeinern.
Hallo, A. B. schrieb: > Die benötigte Leistung um 18.9 Joule in 0.081 Sekunden aufzubringen, > beträgt 233,68 Watt > > Der reale Motor hat seinen Leistungspeak von nur 100W bei 1000rpm. > Das Problem bei der Berechnung ist dass die Drehzahl rein Mathematisch > nach der kurzen Zeit schon bei 1485 U/min liegt, was nicht realistisch > ist da der Motor hier kaum noch Drehmoment hat. Ab ca. 100 U/min fällt > dieses ab. Du gibst dir die Antwort doch schon selbst. 233W wird der Motor nicht leisten, 1485 U/min sind für die meisten Schrittmotor-Antriebe auch unrealistisch. Mach die Rechnung nochmal für eine halbe Umdrehung, dann kommst du vielleicht auf realistische Werte. Wo kommen eigentlich die ungewöhnlichen Formelzeichen her? Ich kenne M für das Drehmoment und J für die Massenträgheit als die üblichen Formelzeichen?! Mit freundlichen Grüßen Thorsten Ostermann
Der Massenträgheitstensor wird üblicherweise mit I oder Theta bezeichnet. Die axialen Massenträgheitsmomenten Theta_xx und Theta_yy werden oft mit I bezeichnet und das polare Massenträgheitsmoment Theta_xy mit J, aber I ist auch nicht besonders abwegig.
Thorsten O. schrieb: > Du gibst dir die Antwort doch schon selbst. 233W wird der Motor nicht > leisten, Braucht er auch nicht, da der Wert 2x falsch ist. 1. Die Leistung wurde aus Energie und Zeit berechnet. FALSCH. 2. Das Drehmoment wurde mit 3Nm aus konstant angenommen. FALSCH. Ergebnisse sind unabhängig vom Formelzeichen. Man kann auch mit griechischen Buchstaben falsch rechnen. "von Stephan" liegt hier schon besser.
Giovanni schrieb: > Die Leistung wurde aus Energie und Zeit berechnet. FALSCH Da Energie das Produkt aus Zeit und Leistung ist, kann man sehr wohl aus Zeit und Energie auf die Leistung schließen.
Es wurde mit den falschen Annahmen ein falsches Ergebnis erzielt, als unglaubwürdig identifiziert und nach Hilfe bei der Fehlersuche gefragt. Ich kann nichts Verwerfliches feststellen.
J. T. schrieb: > Giovanni schrieb: >> Die Leistung wurde aus Energie und Zeit berechnet. FALSCH > > Da Energie das Produkt aus Zeit und Leistung ist, kann man sehr wohl aus > Zeit und Energie auf die Leistung schließen. Klar. Wenn der Mittelwert der Leistung gefragt ist, dann JA. Wenn wir aber von der Max.Leistung reden, dann ist eher der Ansatz: Leistung = Drehmoment x Drehzahl vorzuziehen.
Giovanni schrieb: > 2. Das Drehmoment wurde mit 3Nm aus konstant angenommen. FALSCH. Wenn du dir das Drehmoment Diagram anschaust dann ist das Drehmoment bis zu einer gewissen Drehzahl tatsächlich konstant.
A. B. schrieb: > Wenn du dir das Drehmoment Diagram anschaust dann ist das Drehmoment bis > zu einer gewissen Drehzahl tatsächlich konstant. JA, aber nur bis ~250rpm - und nicht bis zu 1480rpm (wie Du selbst errechnet hast). Genau das ist der Punkt. Man kann jetzt aus dem Diagram (mit Drehzahl in logarithmischer Skalierung) eine Datenreihe konstruieren. Aber soviel Zeit habe ich dann doch nicht. PS: Hatte ich schon mal gefragt. Giovanni schrieb: > * Wenn mas etwas berechnen will, wären die Kennlinie als Datenreihe > nicht schlecht.
A. B. (sfalbuer) stellt die falschen Fragen, resp das Wissen dazu ist nicht vorhanden. Das Dremoment ist auch hier proportional zum Strom. Allerdings muss der Treiber auch diese Beschleunigungskurve innerhalb einer Umdrehung ansteuern koennen. Waere das Problem begriffen und loesbar wenn wir von einem DC Motor sprechen wuerden ? Waere das Problem begriffen und loesbar wenn wir von einem BLDC Motor sprechen wuerden ? Ein Schrittmotor mit Mikroschritt ist wie ein BLDC mit viel mehr Polen.
Danke für deinen Kommentar! Konstruktionsbedingt kann der Motor nur gen au eine Umdrehung zurücklegen.
Aha. Bedeutet aber, nach einer Umdrehung steht das System wieder, die dynamische Energie ist Null, allenfalls wurde potentielle Energie geleistet, etwas angehoben, oder eine Feder gespannt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.