
Mein eufy RoboVac L70 Hybrid Saugroboter hatte einen mechanischen Defekt und konnte entsorgt werden. Interessante Teile wie den LiDAR-Scanner habe ich behalten. Diesen Scanner möchte ich nun für eigene Projekte einsetzen. Leider konnte ich zum Scanner selbst keine Informationen finden. Optisch sehen die Teile alle ähnlich aus, vom Protokoll her konnte ich aber keine Gemeinsamkeiten finden. Mit der Außenwelt kommuniziert der Scanner über vier Pins - RX, PWM, GND und +5V. Alles schön auf der Platine beschriftet. Mit einer Baudrate von 115200 kann man die Rohdaten empfangen, siehe Datei "Rohdaten.txt". Nach Betrachtung der Rohdaten konnte ich den sich immer wiederholenden Header? "5 4 2 c" ausmachen. Darauf hin habe ich die Rohdaten nach dem Header sortiert ausgeben lassen, siehe Datei "Scannerdaten.txt". In der Datei "Scannerdaten.pdf" habe ich versucht weitere Auffälligkeiten zu finden. Das Byte nach dem Header ändert sich permanent. Dahinter eine Null, die in teilweise regelmäßigen Anständen statisch ist. Die Information hinter der ersten Null scheint von der Rotationsgeschwindigkeit abzuhängen. Die Information 2 und 3 von der rechten Seite gesehen, scheint ein Zähler zu sein. Mehr konnte ich bisher nicht in Erfahrung bringen und möchte um Unterstützung Fragen.
Angehängte Dateien:
-

LiDAR_Scanner.jpeg
32 KB -

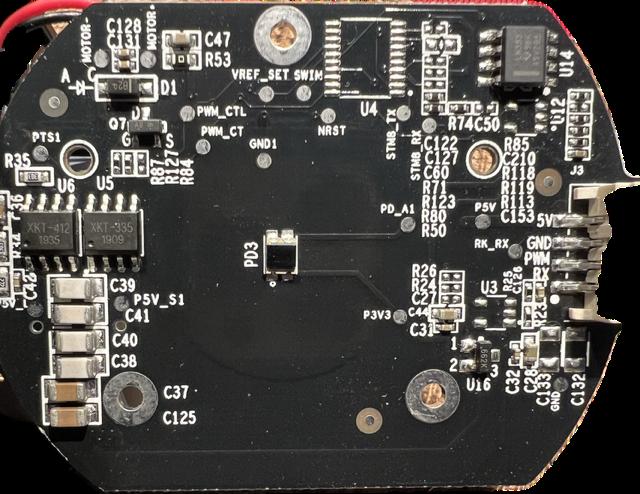
PCB_Innenseite.jpeg
68 KB
Das schaut mehr eher nicht nach LiDAR aus, da ist zu Signalprocessing auf dem PCB. Ich tippe eher auf eine Variante "Optische Mouse sensor", also am Bild des Untergrunds ermittelte x,y Bewegung des Sensors. https://www.youtube.com/watch?v=W5p0iZZCu60 https://www.espruino.com/datasheets/ADNS5050.pdf
Bradward B. schrieb: > Das schaut mehr eher nicht nach LiDAR aus, da ist zu Signalprocessing > auf dem PCB. Ich tippe eher auf eine Variante "Optische Mouse sensor", > also am Bild des Untergrunds ermittelte x,y Bewegung des Sensors. > > https://www.youtube.com/watch?v=W5p0iZZCu60 > https://www.espruino.com/datasheets/ADNS5050.pdf Es ist faszinierend, mit welch voller Überzeugung man komplett daneben liegen kann. Das ist natürlich zweifelsohne ein LIDAR-Modul der üblichen Bauart. Da die alle in dieser Preisklasse irgendwie ähnlich sind, könnte man ja mal damit anfangen, nach ähnlichen Projekten zu suchen, z.B. https://gibbard.me/lidar/ und dort Inspirationen zu finden, wie man so ein Protokoll analysiert. Mit den Rohdaten lässt sich erstmal wenig anfangen, da ja die Umgebung überhaupt nicht bekannt ist. Idealerweise baut man sich einen Zylinder mit sagen wir mal 30 cm Durchmesser, in dessen Mitte man das Modul packt. Der Zylinder hat einen großzügigen Schlitz, aus dem heraus das Modul deutlich weiter sehen kann. Nun müsste man durch Drehen des Moduls im Zylinder schnell herausfinden können, wie die Daten codiert sind.
> F. schrieb: > https://gibbard.me/lidar/ Vielen Dank für den Link, damit funktioniert LiDAR-Scanner! Nur die Baudrate musste ich auf 115200 anpassen.
Beitrag #7815805 wurde von einem Moderator gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.