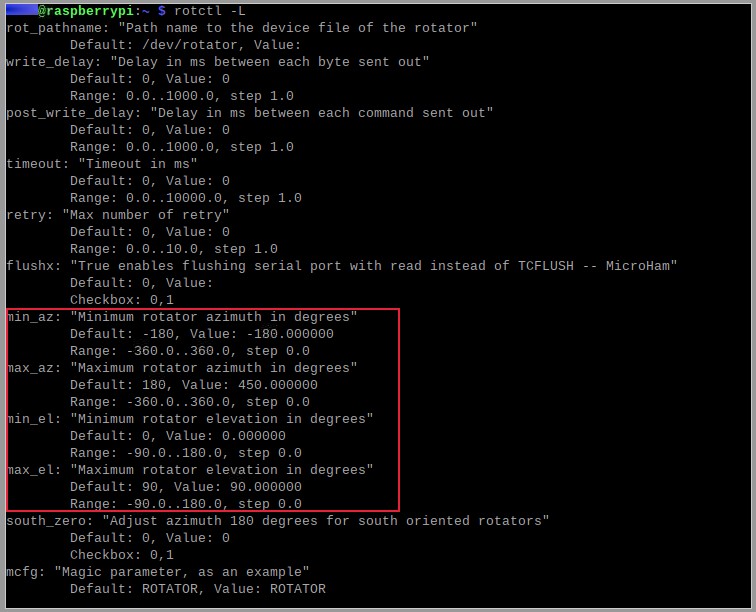
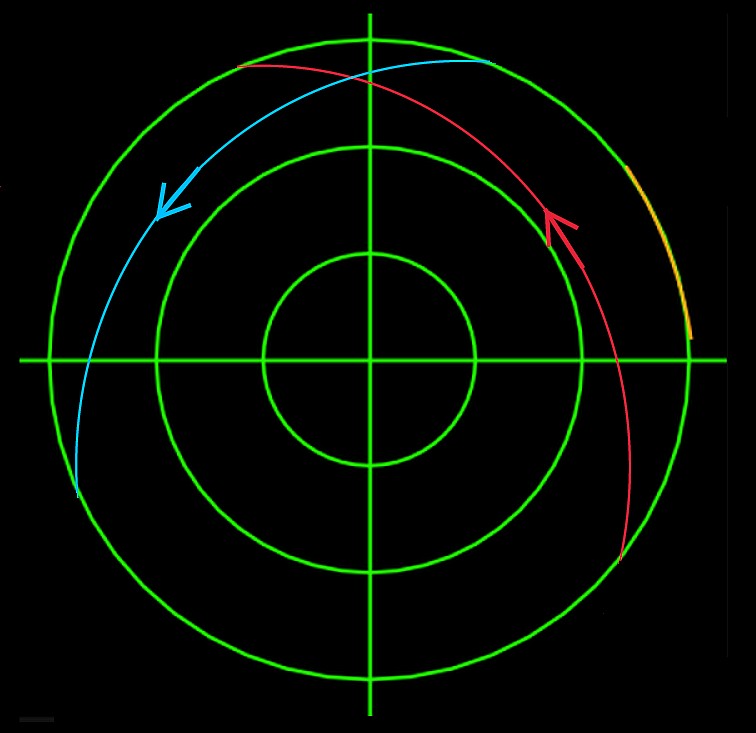
Ich beschäftige mich zur Zeit mit dem Aufbau eines Antennen-Rotors... Siehe auch hier: Beitrag "Rotorsteuerung nach W9KE Tom Doyle ?" Ziel der "Übung" ist: Ich möchte gerne die polarumlaufenden Wettersatelliten wie die NOAA's und Meteore empfangen (im 1,7GHz-Bereich)... Problematisch stellt sich für mich nun da: Irgendwie sind (soweit ich es bisher erlesen/gefunden habe) wohl alle Rotoren wie auch Programme so ausgelegt, dass bei einem Durchlauf über den Norden eine "Kehrtwende" von 0° auf 360° angesagt ist und somit über dem Norden erstmal eine zwangsmäßige "Empfangspause" wäre. Das würde in den empfangenden Bildern einen dicken schwarzen Balken ergeben (denke ich mal so...) Und hier beginnen meine Grundfragen: Wenn man den Rotor um 180° verdreht montiert, könnte er ja Im Kreis über den Norden folgen... Nur dann stimmen ja die übermittelten Gradzahlen ja nicht... Aber ich kann mir nicht vorstellen, dass es dafür keine existierenden Lösungen gibt. Habe ich Sie nicht gefunden? Habe ich einen oder mehrere Denkfehler? Ich bin bei den HamLibs noch nicht so wirklich hinter gestiegen... Ich könnte mir vorstellen (wenn ich das so hoffentlich richtig verstehe) da mit den Parametern für rotctl/rotctld gegensteuern kann. Wenn es denn so wein sollte: Kann mir dann mal bitte Jemand weiterhelfen, wie ich mit welchen Parametern dann rotctl/rotctld starten muss? Achja: Der Rotor wird dafür vorgesehen sein, dass er "über Kopf" schwenken kann, also 180° Elevation. Aber wenn es eine Lösung für den Azimut gibt, dann würde das nicht zwingend benötigt werden... Wenn man das aber nutzen kann - warum nicht - falls es auch dafür eine Lösung gibt...
Angehängte Dateien:
-

rotctl_parameter.jpg
99 KB -

Fadenkreutz.jpg
57 KB
Mike schrieb: > Wenn man den Rotor um 180° verdreht montiert, könnte er ja Im Kreis über > den Norden folgen den "south_zero" aus deinem ersten Screenshot tut vielleicht genau das. Oder hast du das schon probiert? mfg mf
Achim M. schrieb: > den "south_zero" aus deinem ersten Screenshot tut vielleicht genau das. @Achim M. Vielen Dank... Genau das ist es - gerade getestet... Habe jetzt rotctld mit dem zusätzlichen Parameter: -C south_zero=180 gestartet. Somit werden die Koordinaten jetzt "übersetzt" für einen um 180° verdrehten Rotor...
Beitrag #7816688 wurde von einem Moderator gelöscht.
Hi Mike, das Thema interessiert mich auch. Hab mir schon mal einen Nooelec Sawbird GOES-LNA zugelegt und eine Halterung für den Feed drucken lassen. Von daher poste bitte weiter deine (Mis)Erfolge und Erfahrungen, sowie dein Setup. Danke Markus
@Markus B., Das zieht noch etwas... Aktuell bastel ich den Controller mit dem Arduino zusammen... Danach geht es an der Rotor... Habe mir dazu als Aufbaugrundlage bei eBay einen "30W Dual Axis Solar Tracking Schneckengetriebe Motor Überwachungsroboter Monit3g" für 55€ bestellt (Mal das als Suche eingeben - findet man sofort). Allerdings sind da auch noch Umbaumaßnahmen erforderlich...
Könnte für euch interessant sein: https://www.sarcnet.org/rotator-mk1.html https://wiki.satnogs.org/SatNOGS_Rotator_v3
Beitrag #7820481 wurde von einem Moderator gelöscht.
diese Idee hier mit einem ehemaligen Kamera Pan Tilt Rotor hab ich durch Mike angefixt aufgegriffen und sogar bei Ebay ein Exemplar (70Euronen) gefunden und erstanden. Alles heute, kann also erst zukünftig berichten. https://saveitforparts.wordpress.com/2024/03/10/a-cheap-diy-satellite-tracking-mount/ Das Ding scheint ziemlich robust zu sein. Hier mal ein gefundenes Beispielvideo: https://www.dropbox.com/scl/fi/u08k1hginz4mxculji9mi/IMG_3504.MOV?rlkey=9cmgcf7b5obe4qxvqnosy9q0q&st=bz9v7fqe&dl=0
Angehängte Dateien:
-

Schon_mal_Grund_schaffen.jpg
170 KB -

Relais-Platine_von_unten.jpg
81 KB -

Testphase.jpg
290 KB
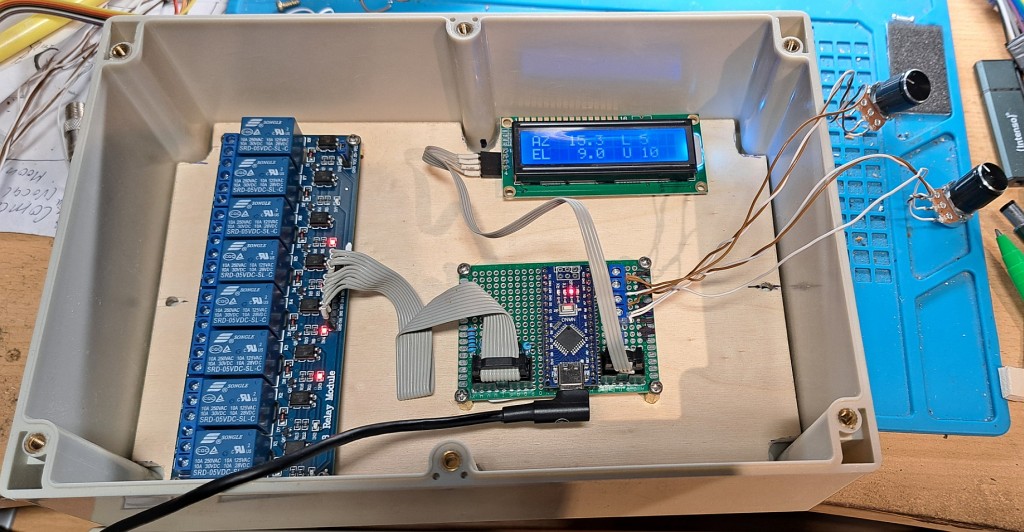
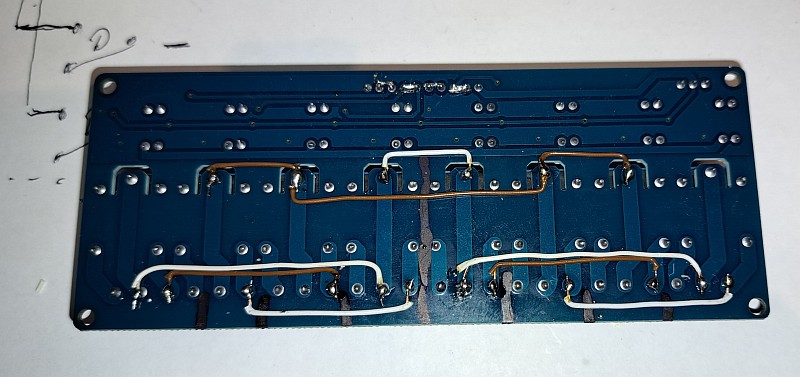
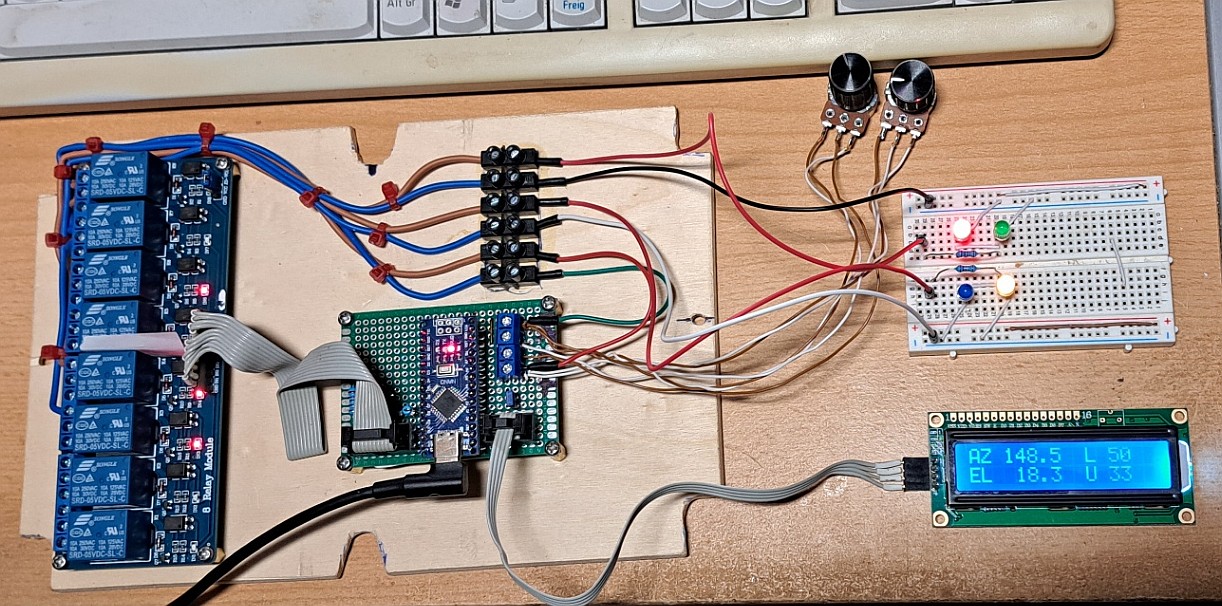
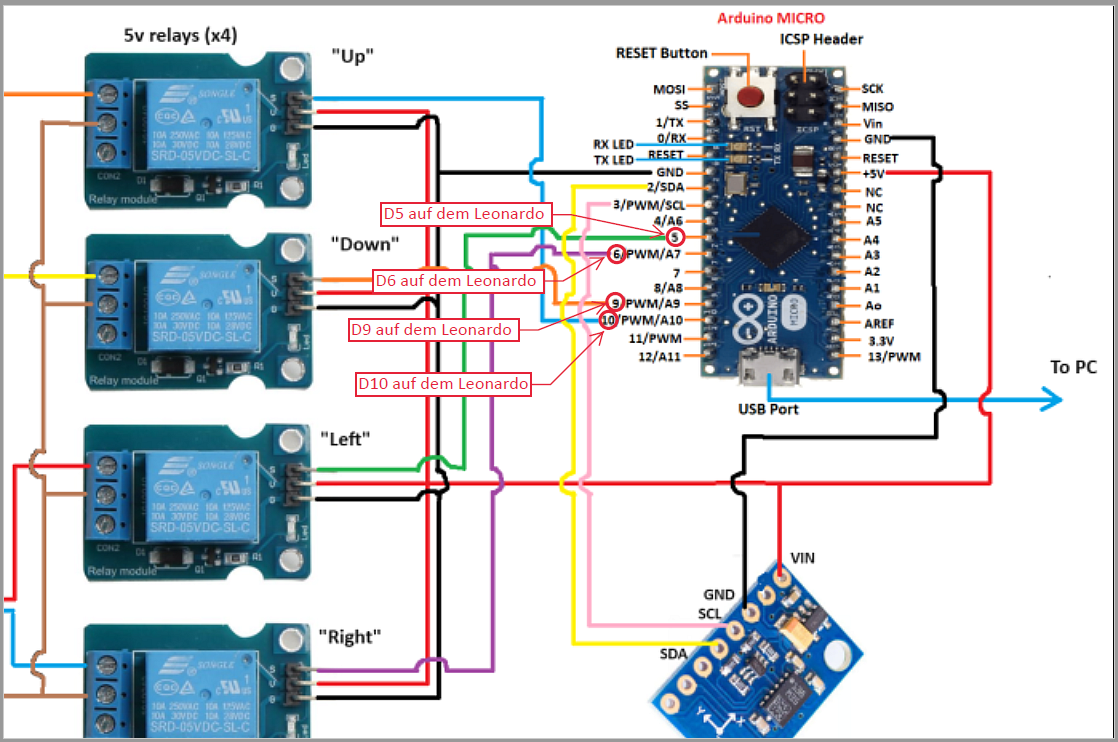
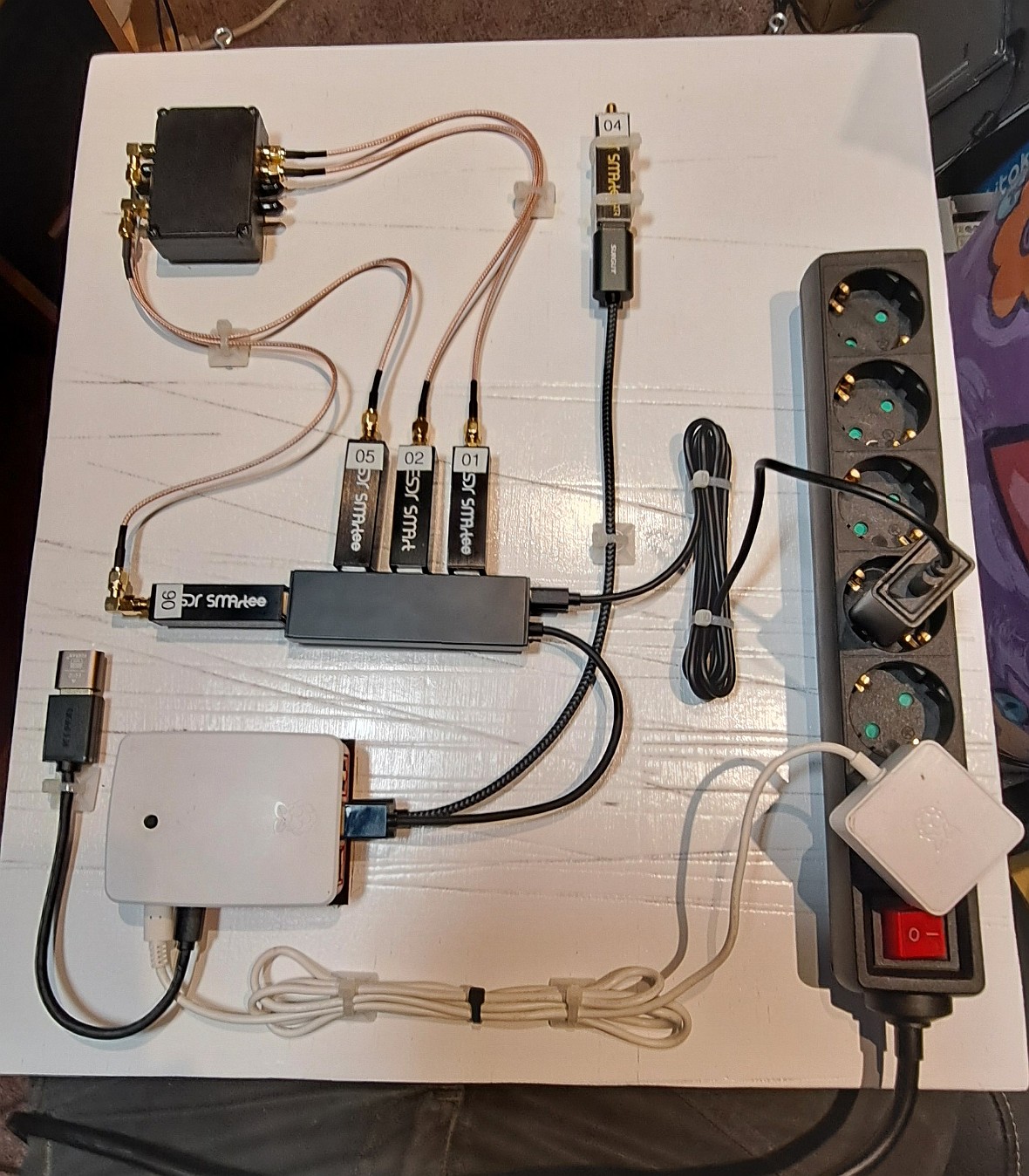
Markus B. schrieb: > Von daher poste bitte weiter deine (Mis)Erfolge und Erfahrungen, sowie > dein Setup. @Markus B. Naja... "Mühsam ernährt sich das Eichhörnchen" Aktuell bin ich einige Schritte weiter, was den Controller / die Steuerung anbelangt (Fotos) Die Relais-Platine hat ein paar Brücken erhalten, damit ich nicht Alles über die Schraubklemmen verdrahten muss... sieht dann von oben auch aufgeräumter aus... Ich habe mich nun doch entschlossen, auf den Sketch von W9KE zurückzugreifen: http://www.tomdoyle.org/SimpleSatRotorController/SimpleSatRotorController.html Die "Firmware" arbeitet schnell und man kann damit leicht Gleichstrommotoren ansteuern. Ein aktuelles Problem besteht in der Problematik (ist aber auch beim Sketch von YO3RAK: https://racov.ro/index.php/2020/12/09/arduino-based-antenna-rotator-part3-software-tracking-update/ auch nicht anders), dass da über die hamlibs (rotctld) nicht wirklich die Rückmeldungen zu der aktuellen Position des Rotors (Auswertung der EL-/AZ-Potis) zurückgemeldet werden. Manche Programme interessiert das nicht unbedingt... SatDump ist da ziemlich "bockig": Fragt bei rotctld ständig nach der aktuellen Position des Rotors nach... Nach vier Anfragen ohne verwertbarer Antwort beendet SatDump die Verbindung zum rotctld Ist ein Sat jedoch im verfolgbarer Umlaufbahn, dann ist die Abfolge von SatDump: - Befehl "Gehe dahin!" - Abfrage "Wo bist Du?" - Befehl "Gehe dahin!" - Abfrage "Wo bist Du?" (usw...) Solange bleibt also die Verbindung bestehen und funktioniert auch. Ich habe das mal auf Github bei den SutDump-Entwicklern gemeldet. Es reicht ja für den Controller ja vollkommen aus, wenn er weiß, wo er den Rotor hinschicken soll - den Rest macht er ja Alleine. Aber evtl. findet sich ja hier im Forum auch Jemand, der sich mit Protokollen wie auch Arduino-Programmierung gut auskennt und da die geforderten Rückantworten implementieren kann... Ich habe den Sketch von W9KE insofern modifizieren können, dass ein I2C-Display verwendet werden kann... Der Rest ist mir dann dann leider doch zwei Nummern zu hoch. Bis zu einer Lösung (egal auf welcher Seite) beiße ich in den sauren Apfel und muss dann bei Sat-Durchlauf SatDump mit rotctld neu verbinden...
Angehängte Dateien:
-

Wiring.png
580 KB -

leonardo_pinout.png
320 KB
Hallo,
ich möchte auch den SarcNet Rotor aufbauen, wie schon erwähnt mit dem
alten, aber robusten Pelco PanTilt Kamera Gimbal.
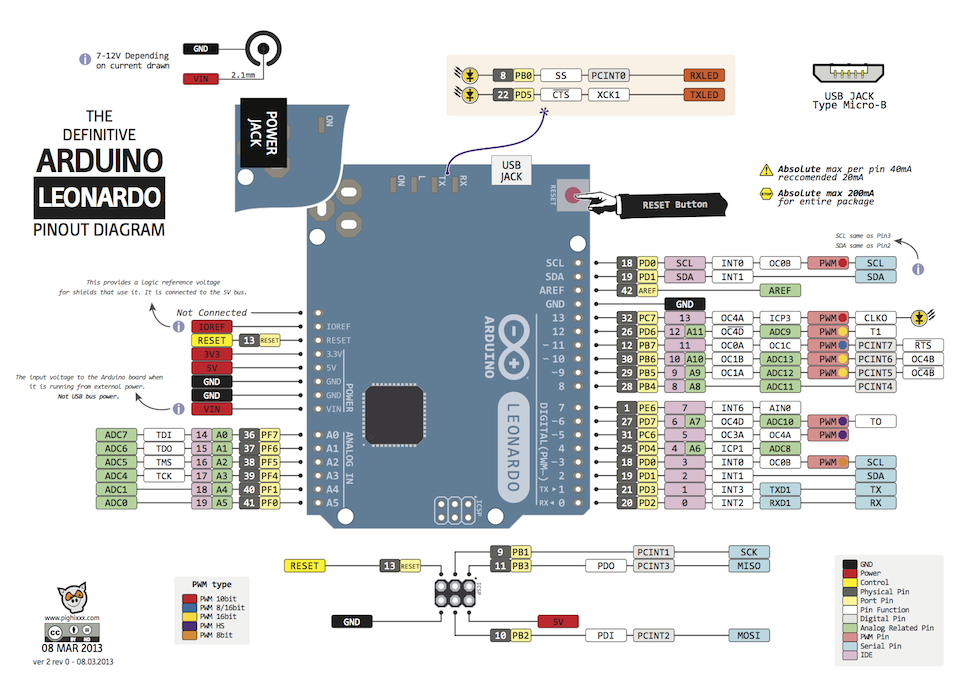
Da ich kein Arduino Micro habe, jedoch einen Leonardo, hab ich die
Betriebssoftware dort aufgespielt und schonmal den Kompass LSM303
angelötet.
Das hat geklappt, denn in der Konsole gibt er auf Anfrage Daten aus, wie
bei SarcNet beschrieben. Soweit so gut.
Das Pinout zwischen Micro und Leonardo ist jedoch anders und mir ist
nicht klar wo ich zB. den Piezo als Signalgeber zum Kalibrieren
anschließen soll, und natürlich auch die Relaisplatine, die ich erstmal
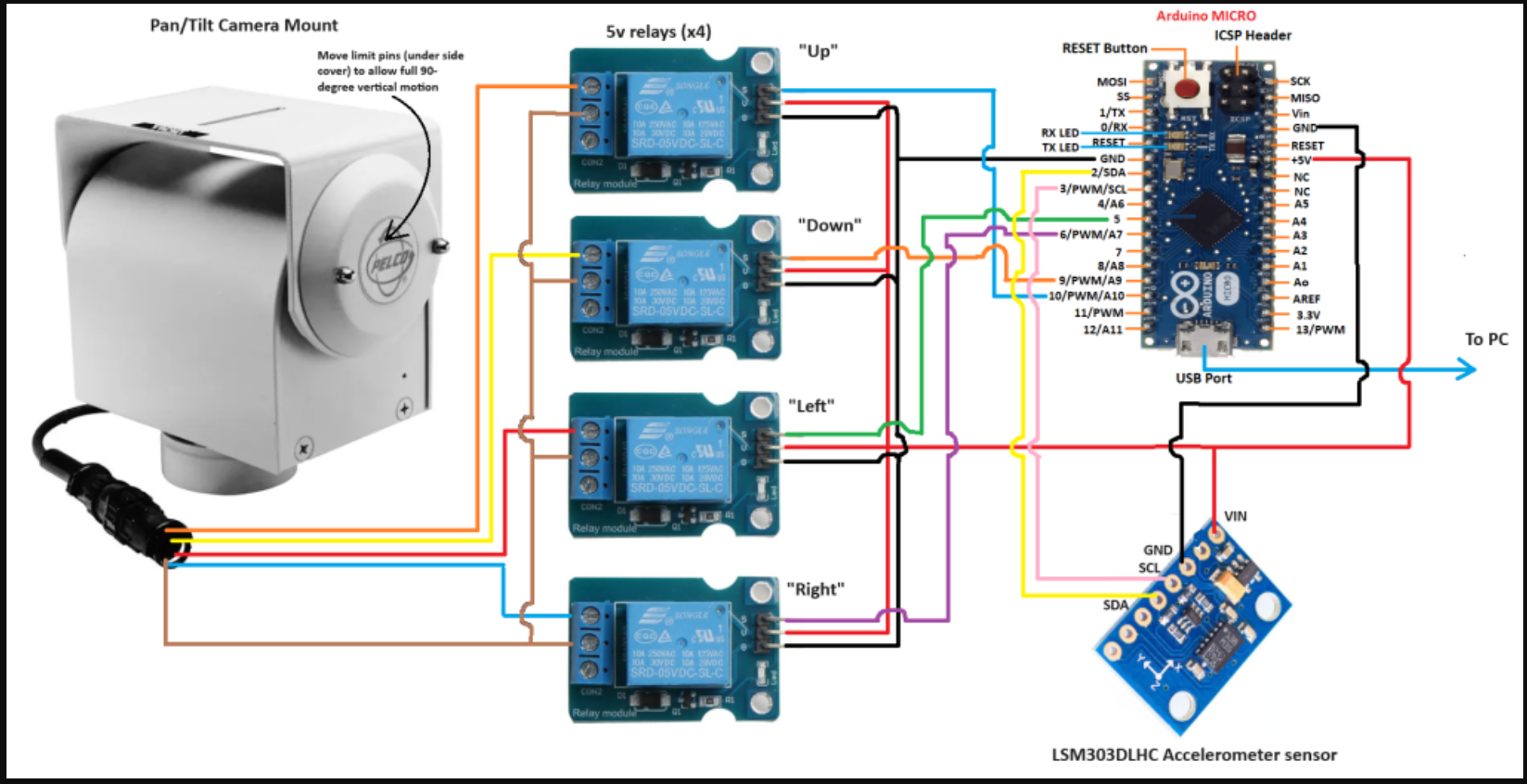
zum "groben" ausprobieren verwenden wollte. So wie auf Bild wiring zu
sehen.
>>>>>https://saveitforparts.wordpress.com/2024/03/10/a-cheap-diy-satellite-tracking-mount/<<<<<;
Natürlich habe ich die jeweiligen Pinouts verglichen, aber so gut stehe
ich auch nicht im Thema, um die zweifelsfrei auf den Leonardo
umzumappen. Möchte den auch nicht beim rumprobieren zerschießen. Wo kann
ich also die 4 Leitungen für die Relaissteuerung und den Piezo
anschließen?
Angehängte Dateien:
-

Pinout-Mikro_Leonardo.png
490 KB
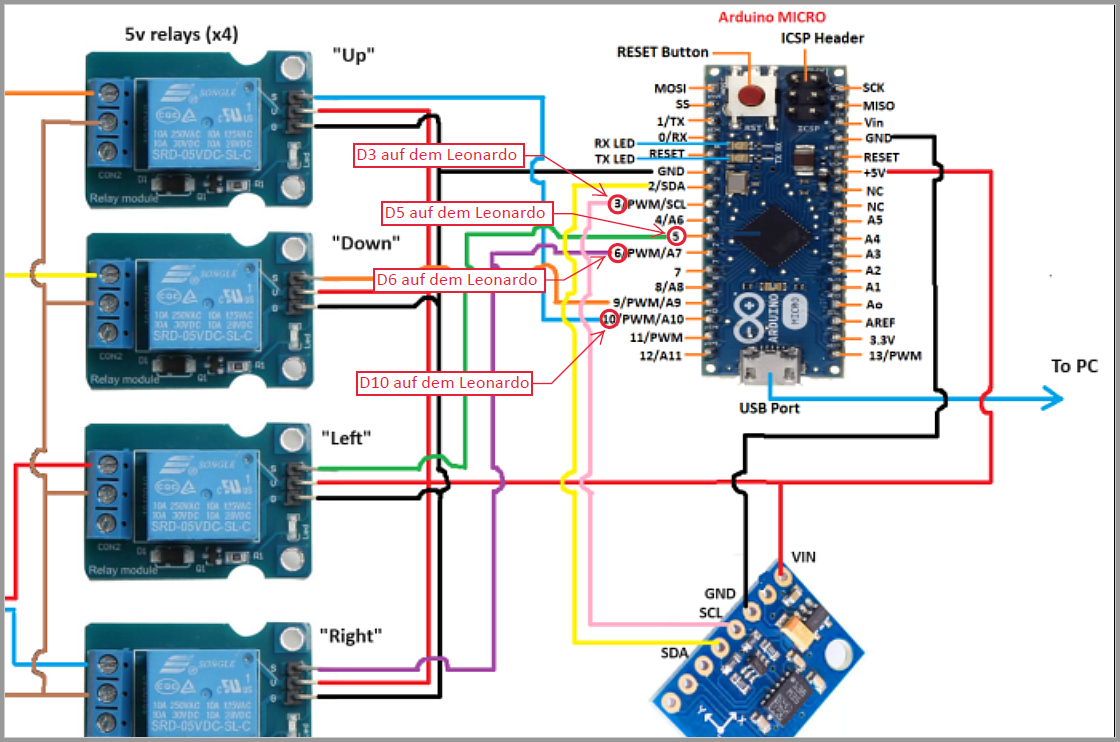
@Klaus B. Ich kann auf Deinem Schaltungsbild mit dem "Mikro" keinen Pizo erkennen/finden... Da kann ich Dir nicht weiterhelfen... Klaus B. schrieb: > und natürlich auch die Relaisplatine, die ich erstmal > zum "groben" ausprobieren verwenden wollte. So wie auf Bild wiring zu > sehen. Um die Pinouts zu vergleichen, habe ich mich hier an der gut lesbaren Grafik orientiert: https://forum.arduino.cc/t/unofficial-arduino-micro-pinout-diagram/145230 Dabei ist dann das rausgekommen, was ich im Anhang reingepackt habe... Ich denke, sollte Dir auf alle Fälle bei der Relais-Ansteuerung weiterhelfen... BTW: Dein Link führt auf eine "Not-Found"-Seite... Die fünf Linkspfeile am Ende gehören da nicht hin... ...Und soweit ich im Projekt dort erkennen konnte, wurde da kein Pizo verbaut... Ich vermute mal, dass Du Dich da auf das Video versteifst...
Angehängte Dateien:
-

Pinout-Mikro_Leonardo.png
490 KB
@Klaus B. Hatte im Pinout einen Fehler... Jetzt noch fix korrigiert
Hallo! Ich hatte in meiner Haussteuerung für die Rollos (hoch-runter) und die Fussbodenheizung (wärmer-kälter) in der Erprobungsfase bemerkt, dass bei einem Softwarefehler beide Richtungen angesteuert werden konnten. Die Relais habe ich daraufhin "eigensicher" verschaltet. Wenn beide Relais abgefallen sind: Normalzustand. REL1 angezogen: Aufwärts. REL2 angezogen: Abwärts. beide REL1+2 angezogen: nichts passiert.
Beitrag #7825747 wurde von einem Moderator gelöscht.
"Ist ein Plan auch noch so gut gelungen verträgt er doch Veränderungen" Sketch nach W9KE werde ich wohl mit 99% Wahrscheinlichkeit auch verwerfen... Bin auf das Projekt von K3NG gestoßen: https://github.com/k3ng/k3ng_rotator_controller Also genereller Vorteil: Kommunikation auch rückwärts zum rotctld funktioniert und somit auch keine Probleme mit SatDump. Standard ist das "Yaesu GS-232A/B"-Protokoll, aber auch Easycom ist implementiert. Voraussetzung ist jedoch ein Arduino Mega: Der Speicherplatz auf Mikro, Nano und auch Uno reicht nicht bei AZ + EL(Nur AZ würden Die reichen). Mit nem I2C-Display hatte ich Probleme beim Kompilieren: Es wurde immer Irgendwas angemeckert... also muss nun doch ein Display mit Standard-Ansteuerung herhalten... Das funktioniert(Da gehe ich den Weg des geringsten Widerstandes). Komplex ist die Konfiguration: Irgendwie kann der Sketch wohl nahezu Alles... man muss nur das Gewünschte in den entsprechenden .h-Files auskommentieren (nicht gewünschtes kommentieren), je nach Dem, was man hat und was benötigt wird. Gut ist: Es ist zur Auswertung der aktuellen Position ist auch der "HMC5883L digital compass support" vorhanden. Das erspart den ganzen mechanischen Aufwand für die Potis im Rotor... und der damit verbundenen notwendigen Kalibrierung... Allerdings konnte ich das in meinem Testaufbau noch nicht testen: Habe heute erst einen Statz solcher Module bestellt... Jedoch habe ich hier schon Probleme beim Kompilieren mit der Meckermeldung: "Compilation error: #error "You must specify one EL position sensor feature"" Jetzt weiß ich noch nicht, in welchem h.-File ich da noch was definieren/anpassen muss...
Angehängte Dateien:
-

NOAA1820250208-120507.png
560 KB
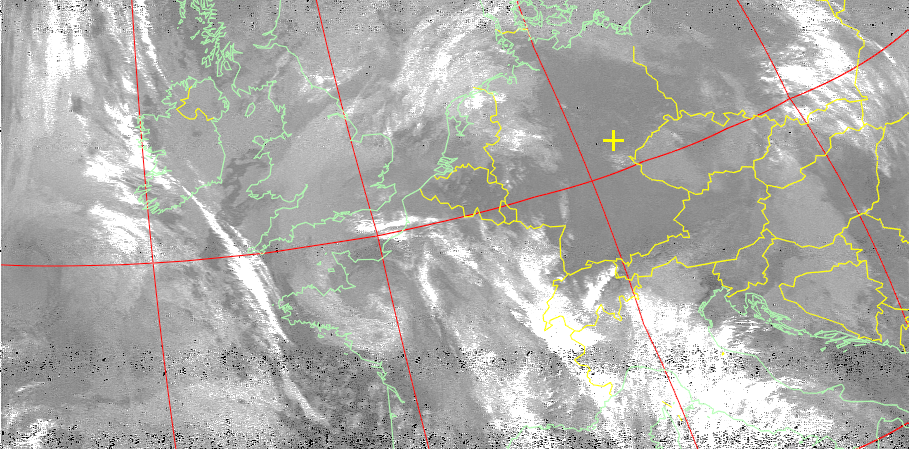
Für die NOAA Satelliten braucht es definitiv keinen Rotor. Die sind eh nur für eine bestimmte über Deinem Standort für eine bestimmte Zeit (meist ca.30min) sichtbar. Wann diese Zeitpunkte sind kannst Du z.B. über diese Webseite https://celestrak.org/NORAD/ raus bekommen. Zum Empfang der Satelliten eignet sich eine QFH-Antenne (https://www.darc.de/fileadmin/filemounts/distrikte/h/ortsverbaende/39/H39-Workshop/Antennenbau/QFH-Antenne_Klatt.pdf) sehr gut. Die wird allerdings nicht auf einem Rotor montiert - zumindest sind mir keine solchen Installationen bekannt. So eine Anlage mit QFH, SDR-Stick und BananaPi läuft bei mir seit gut 5 Jahren im Dauereinsatz. Ein Bild von heute Mittag habe ich mal angehangen. Jeden der 3 NOAA's kann 2 - 3 mal pro Tag für ca. eine halbe Stund (manchamal auch etwas mehr) empfangen.
Angehängte Dateien:
-

QFH.jpg
86 KB -

Turnstyle.jpg
270 KB -

projection_24_Kanal_B_HIRS.jpg
240 KB -

Station.jpg
370 KB


@Hans
Grundsätzlich für das "Einfache" gebe ich Dir recht:
Dafür habe ich bereits ne QFH und auch eine Turnstyle.
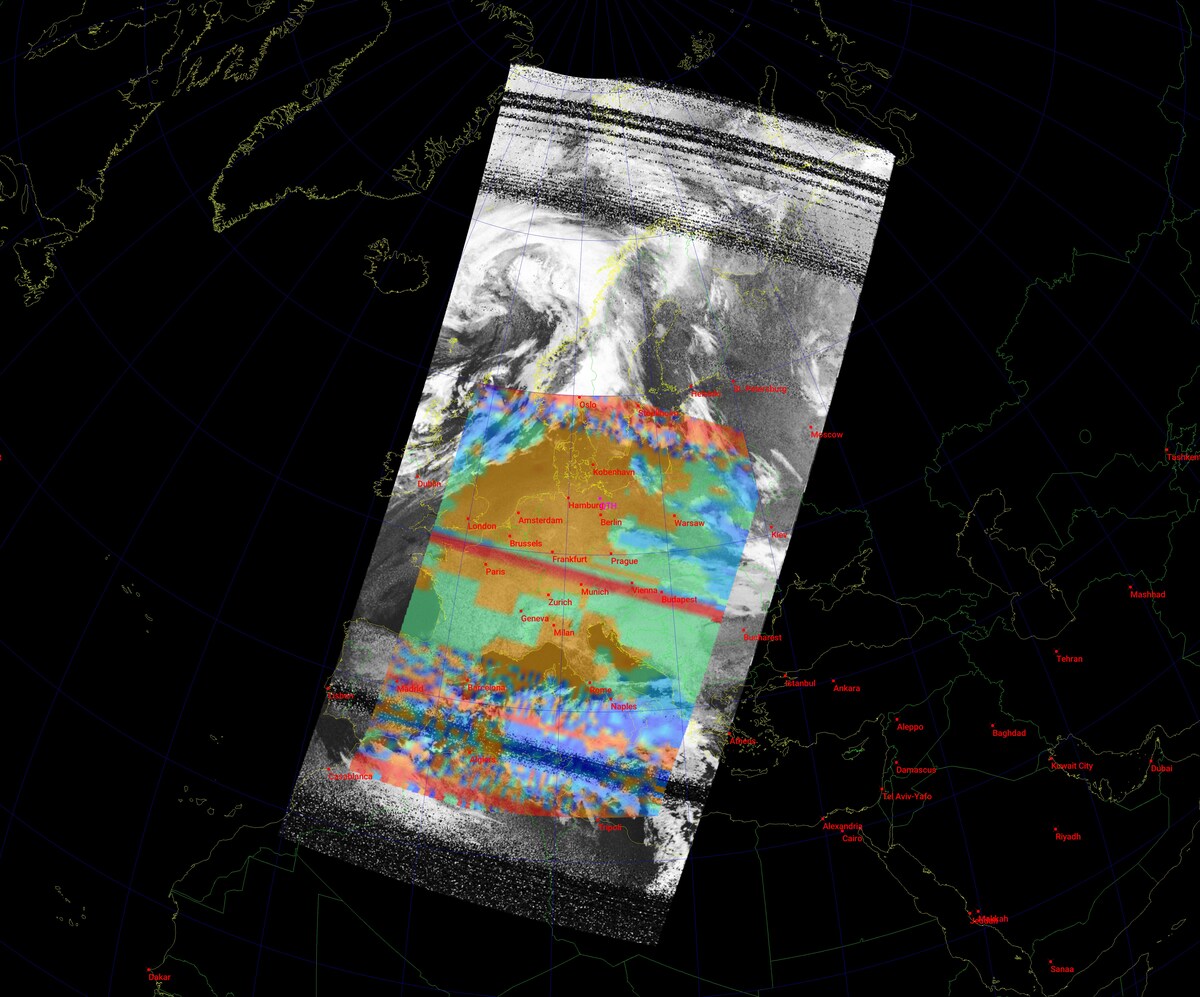
Mit der QFH ist der Empfang der APT-Kanäle bersser,
mit der Turnstyle der Empfang der DSB-Kanäle (NOAA15 und 18 auf 137,35
MHz undNOAA19 auf 137.77 MHz).
Letztere enthalten die HIRS-Daten...
Wenn man Beide in eine Projektion übereinanderlegt, kommt dann schon
etwas mehr raus...
Allerdings wie sich erkennen lässt gibt es da durchaus Aussetzer...
Bei HRPT im 1,7GHz-Bereich werden die Daten komplett übertragen und auch
in einer höheren Auflösung...
Der Empfang ist jedoch dann schon etwas "sportlicher" - sprich
aufwendiger.
BTW läuft das bei mir bereits über nen Raspi mit insgesamt 5 Sticks
(jedoch noch nicht Alle in Benutzung, da ich noch im Aufbau und
"Testmodus" ("Methode des unbekümmerten Probierens") bin...
Bei 1,7GHz kommt man mit ner normalen QFH wie auch Turnstyle nicht
weit...
Da ist schon Reflektor-Antenne mit Rotor angesagt...
Wie Du also siehst:
Mit Deinem Hinweis zur normalen Empfangstechnik bin ich bereits
unterwegs.
Die 1,7 GHz sind die nächste Ausbaustufe...
Und wenn ich da noch den HMC5883L im Sketch aktiviert bekomme, ohne das
ich beim Kompilieren angemeckert werde - dann wäre das schon mal ein
weiterer Schritt... (Notfalls würde ich auch mit Potis arbeiten - der
mechanische Aufwand und die Kalibrierung wäre dann aber umfangreicher)
Achja:
Die Meteore M2-3 und M2-4 arbeiten auch mit hochauflösenden
Übertragungen im 1,7GHz-Bereich sowie Metop-B und Metop-C...
Wenn ich die Alle empfangen könnte - das wäre schon ne "Hausnummer"
Meteor M2-5 soll wohl laut Planung dieses Jahr ins All gehen...
Hans schrieb:
> Jeden der 3 NOAA's kann 2 - 3 mal pro Tag für ca. eine halbe
> Stund (manchamal auch etwas mehr) empfangen.
Selbst bei maximaler Elevation von 0° über 90° nach 0° nicht wirklich
viel mehr als etwa 15min (jedenfalls nicht bei mir im N/O von
Deutschland - wenn es bei Deinem QTH anders ist... kann ich nicht
beurteilen)
Ha - manchmal kommt die Idee hier beim Schreiben und dann wieder Sketch lesen: Habe jetzt mal den HMC5883L in der Definition rausgenommen und dafür den LSM303 für Azimut und Elevation definiert: Damit lässt sich der Sketch problemlos kompilieren... Also nochmal Amazon bemühen...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.