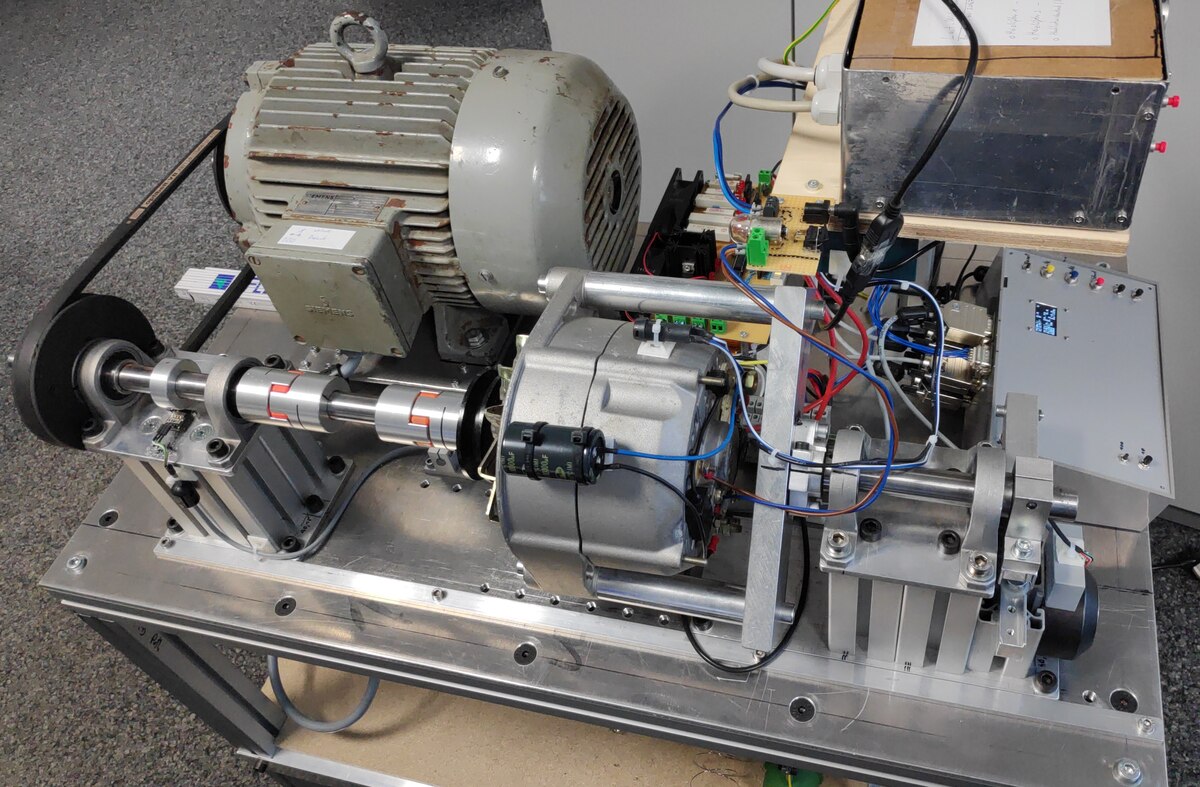
Hallo zusammen, ich habe mir einen Lichtmaschinenprüfstand gebaut welcher von einem 4kW Drehstrommotor und einem Frequenzumrichter angetrieben wird. Ich teste verschiedene Lichtmaschinen und z.B. auch BLDC-Motoren im Generatorbetrieb. Mit einem Arduino Mega und verschiedener Sensoren messe ich Drehzahl, Drehmoment, Strom, Spannung und berechne den Wirkungsgrad. Funktioniert soweit ganz gut. Problem: In einigen Betriebspunkten habe ich ziemlich starke Störungen und der Arduino hängt sich auf. Oder es kommt zu solchen Phänomenen, dass die berechnete Drehzahl (Hallsensor, rot. Magnet, Zeitmessung) sporadisch absurde Werte anzeigt. Also ich würde sagen, dass das irgendwelche EMIs sind. Ich kann im Moment auch nicht sicher eingrenzen ob die Störungen eher vom Motor/FU oder vom jeweiligen Generator kommen... ich kann leider keine eindeutige Systemmatik erkennen. Der Arduino und die meiste Elektronik sitzt in einem Gehäuse. In das Gehäuse gehen keine Leitungen rein, die direkt mit der Lichtmaschine verbunden sind. Die Strom- und Spannungsmessung findet außerhalb statt mit speziellen I2C-ICs, welche über I2Cs-Separator-ICs mit der Arduino-Box verbunden sind. Alle Kabel die aus der Box rausgehen sind geschirmt, die Schirmung mit GND es Arduino verbunden und am Anfang und Ende jeder Leitung ist ein Klappferrit. Der Arduino wird mit einem etwas besseren 9V-Steckernetzteil versorgt - hängt aber an der gleichen Steckerleiste wie die 230V-Versorgung des Frequenzumrichters. Die 3-Phasen-Leitung von FU zu Drehstrommotor ist geschirmt und Schirmung mit PE verbunden. Am Anfang und Ende irgendein Klappferrit. Die Leitung von Stromversorgung zu FU ist ungeschirmt. Es gibt auch noch eine "Steuerleitung" zu meinem FU, die von einem Bedienfeld zum FU führt ... ebenfalls ungeschirmt. Das Gestell ist aus Alu und geerdet mit PE. Ich hatte zuvor stärkere Störungen ... durch die Schirmung und Ferriten an einigen Leitungen hat es sich verbessert. Leider sind sie teilweise immer noch da und behindern die Versuche die ich machen wollte. Ich hätte daher einige Fragen: 1. Also erstens würd ich mich über allgemeine Tipps und Vorschläge freuen ;-) 2. Eigentlich soll man ja möglichst den Stör-"Sender" entstören... verhindert man mit Schirmung und Ferrit an beiden Enden der Leitung eher das "Senden" oder eher das "Empfangen" einer Störung? 3. Ich habe noch kleine Ferritringe mit einem ID von ca. 3mm hier rumliegen. Ich überlege mir, ob ich die in die Arduino-Box einbaue und direkt die Signalleitungen durchfädle, die zum Arduino gehen. Sollte ich dann jeweils alle Adern einer geschirmten Mantelleitung durch ein Ferritringchen fädeln/wickeln (also z.B. +5V, GND, Signal) oder z.B. lieber in jede einzelne so eine Ferritperle einbauen? Das Thema EMI erscheint mir wirklich sehr komplex - und da es für mich messtechnisch kaum möglich ist den Ursprung der Störungen/Fehler festzustellen, würde ich hier die Strategie "try and error" wählen ;-) PS: Noch ein Hinweis zur Sicherheit an der Maschine - normalerweise ist eine Abdeckung auf dem Prüfstand, welche eine mögliche Berührung mit Keilriemen oder anderer rotierender Teile verhindert!
Angehängte Dateien:
von Raphael Z. schrieb: >verhindert man mit Schirmung und Ferrit an beiden Enden der Leitung eher >das "Senden" oder eher das "Empfangen" einer Störung? Wirkt in beide Richtungen. Zu ein Tiefpass gehört aber auch noch mindestens ein Kondensator, nicht nur eine Drossel alleine.
Angehängte Dateien:
-

klappferrit_muster.jpg
57 KB
EMV-Labore wissen sicher mehr. Erst würde ich mal den Prüfstand in die kritische Situation bringen und dann mit einer Sonde (Spule) suchen, woher das Elend kommt. Da beim Test der Lima auch ein schöner Strom fließen kann, würde ich die Massepunkte nochmals genauer ansehen. Klappferrite sind sicher auch ganz nützlich am rechten Fleck. Je nach Aufbau könnte das Übel auch induktiv einkoppeln?
Lu schrieb: > klappferrit_muster.jpg .. ist bei den niedrigen Frequenzen und hohen Strömen sinnlose Spielerei.
Raphael Z. schrieb: > Strategie "try and error" Auch im Labor mit sündhaft teuren Geräten macht man letztlich kaum was anderes. ;-) In Deiner Beschreibung kommt vieles nicht vor. Ein Schaltbild wo was angeschlossen ist, wäre hilfreich. Die hauptsächlichen Störungen wird der FU machen. Sowohl Netzeingangsseitig als auch Motorseite. Ferrite helfen im dreistelligen Mhz Bereich, ansonsten eher wenig. Wie sind die Messplatzseitigen i2C Trenner versorgt? Diese Trenner verletzen die I2C Spec um die Richtung zu erkennen und ich hatte schon massiven Ärger WEGEN der Trenner. Hängt der Arduino über USB an einem PC? Wenn ja, verwende mal einen USB Isolator. Verwende einen EMI Filter zum FU. Irgendwas das den Strom kann und schön fett ist. Das ist keine exakte Wissenschaft und viel hilft viel. Geschirmte, geerdete Motorleitung. Erdung zum FU + Motor + Zuleitung massiv auslegen und am Sternpunkt zusammenlegen. Ardunio GND mal von PE trennen, den Schirm der I2C leitungen am PE Sternpunkt angeschlossen. 9v Netzteil des Arduino möglichst aus einem anderen Stromkreis als den FU betreiben.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.