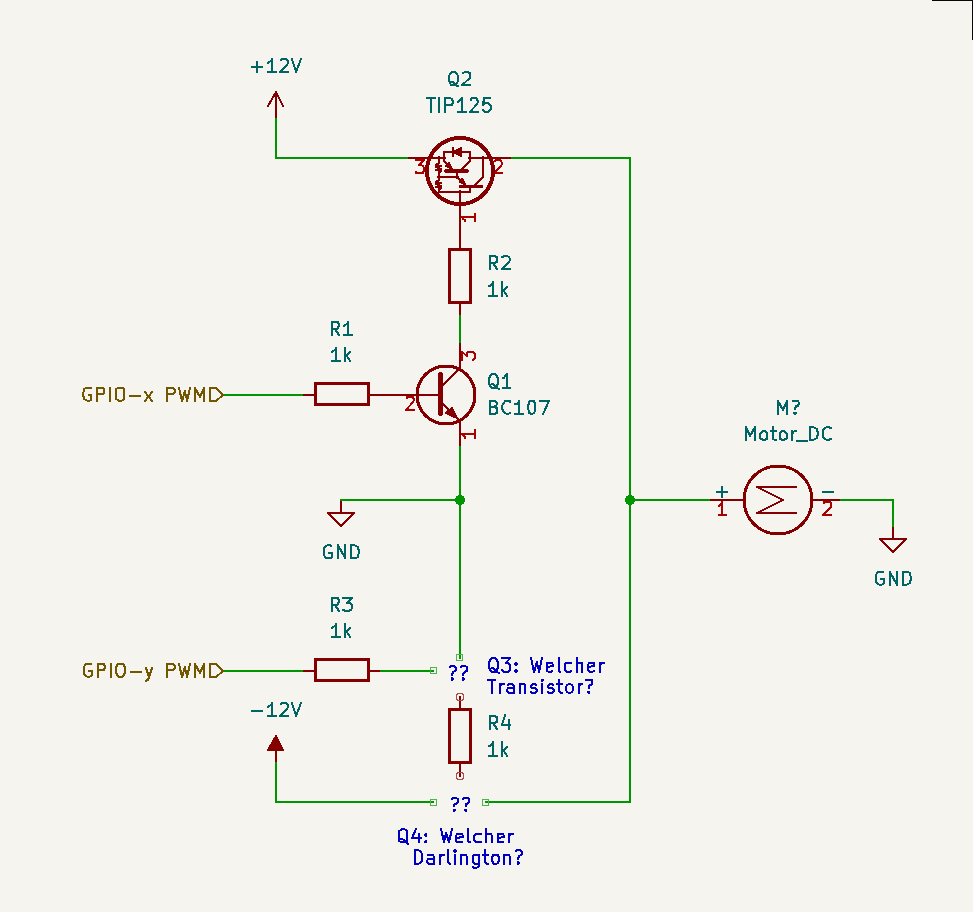
Hallo zusammen, ich möchte aus einem Atmega heraus ein PWM-Signal wahlweise zum Durchschalten einer positiven oder einer negativen Spannung nutzen. Für die positive Spannung ist das einigermaßen klar, obere Hälfte des Bildes. Aber wenn ich das gleiche Prinzip auch für eine negative Spannung anwenden möchte, dann brauche ich doch einen anderen Darlington(Q4)...richtig oder falsch? Und wenn richtig, welchen? Und infolgedessen mglw. auch einen anderen Transistor (Q3)...richtig oder falsch? Und wenn richtig, welchen? Da ich die GPIOs selbst programmiere, kann ich sicherstellen, dass das PWM-Signal immer nur an x ODER y anliegt, nie jedoch an beiden. Falls "ausgeschaltet" beim unteren negativen Zweig erfordert, dass GPIO-y in Ruhe auf High liegen muss, kann ich auch das einrichten und gfs. den PWM auf GPIO invertieren...das ist ja alles Software. Machen sich die beiden Darlingtons in der dargestellten Schaltung gegenseitig kaputt? Danke für Unterstützung und Grüße an alle
Angehängte Dateien:
Warum nimmst keine fertige Halbbrücke für sowas. Oder schaust dir wenigstens mal an wie man eine Halbbrücke aufbaut wenn du schon alles selbst machen willst.
Cyblord -. schrieb: > Warum nimmst keine fertige Halbbrücke für sowas. Na ich würde mal vermuten, daß er den Begriff "Halbbrücke" nicht kennt 😉. Nicht jeder weiss alles 😁.
Welchen Strom brauchst Du? So auf die Schnelle: https://www.digikey.de/de/products/detail/allegro-microsystems/A3909GLNTR-T/3979655 Hat Kurzschluß- und Überstromschutz und kann bis 1,8A. Da Vollbrücke entfallen die -12V. Einfacher geht es nicht.
Frank X. schrieb: > Machen sich die beiden Darlingtons in der dargestellten Schaltung > gegenseitig kaputt? Wenn du sie falsch ansteuerst - ja > Aber wenn ich das gleiche Prinzip auch für eine negative Spannung > anwenden möchte, dann brauche ich doch einen anderen > Darlington(Q4)...richtig oder falsch? Und wenn richtig, welchen? Das hängt u.a. vom Anlaufstrom des Motors ab. Die negative Versorgungsspannung könntest du dir sparen, indem du an Stelle des festen Gnd am Motor eine zweite Halbbrücke verwendest.
Frank X. schrieb: > Da ich die GPIOs selbst programmiere, kann ich sicherstellen, dass das > PWM-Signal immer nur an x ODER y anliegt Du kannst mit dem Atmega nicht direkt den y-Eingang von deiner Halbbrücke ansteuern, da muss noch eine Umformerstufe dazwischen geschaltet werden, die dir die negative Ansteuerspannung erzeugt!
Vielen Dank für die prompten und vielfältigen Tipps! Leider muss der rechte Anschluss des Motors auf GND liegen, deshalb wird das mit dem Allegro-Teil nicht funktionieren. Aber ich werde auf Euren Anregungen aufbauen.
Peter D. schrieb: > So auf die Schnelle: > https://www.digikey.de/de/products/detail/allegro-microsystems/A3909GLNTR-T/3979655 > Hat Kurzschluß- und Überstromschutz und kann bis 1,8A. > Da Vollbrücke entfallen die -12V. > Einfacher geht es nicht. Tja, fast ! Nachdem das mit den -12V ums Verrecken nicht wollte, habe ich mir diesen A3909GLNTR aus Amiland kommen lassen. Und dazu habe ich bei Berrybase das passende Breakoutboard (Bestnr SMA-SOT23) bestellt. Beides angeblich SSOP-10, passt nur nicht: Der Chip hat von Pin zu Pin 6mm und stößt damit an die Bohrungen für die Pfostenleisten (7,62mm Raster). Der Chip ist schlicht einen Hauch zu groß und den LY-Typ kann kein Mensch mehr von Hand löten Anybody any idea, wo man ein passendes Breakoutboard findet?
Frank M. schrieb: > A3909GLNTR aus Amiland ... Und dazu ... passende Breakoutboard Wolltest du das 'LN'- Package mit 1mm Pinabstand auf die SOT23-Seite mit 0.95mm Pinabstand friemeln? ... Bei der Gelegenheit die Beine noch 'n "bisschen anziehen"?
Ralf G. schrieb: > Wolltest du das 'LN'- Package mit 1mm Pinabstand auf die SOT23-Seite mit > 0.95mm Pinabstand friemeln? Ja, Abstand zwischen den Pins scheint mir nicht das Problem zu sein, sind ja nur 5 Pins. Aber die Übergröße zu den Pfostensteckern hin macht mir Sorgen. Ich google mir gerade einen Wolf, aber ich finde kein Breakoutboard für dieses Allegro-Spezialmaß.
Ja, bei den Footprints gibt es keinen Standard. Jeder Hersteller kocht sein eigenes Süppchen. Ich übernehme dann für Altium das Footprint und 3D aus dem ECAD-Modell, z.B. bei Mouser.
Frank M. schrieb: > Da ich die GPIOs selbst programmiere, kann ich sicherstellen, dass das > PWM-Signal immer nur an x ODER y anliegt, nie jedoch an beiden Nein. Beim Einschalten bis zur Initialisierung sind die GPIO als Eingänge eher offen und damit undefiniert. Frank M. schrieb: > Machen sich die beiden Darlingtons in der dargestellten Schaltung > gegenseitig kaputt? Das kann passieren, weil die Schaltung keine Verriegelung dagegen besitzt. 3.3V GPIO an BC107 (aus welchem Museum gestohlen?) liefert 2.5mA, der schaltet über 1k mit 10mA den Darlington der 250-fach verstärken könnte auf 2.5A maximal. Negativ könnte so gehen:
1 | GPIO------+ |
2 | |E |
3 | GND--1k--|< BC177 |
4 | | |
5 | 1k |
6 | _|_ |
7 | E / \ |
8 | -12V ---' '-- Motor |
9 | TIP120 |
Aber wir raten alle von dieser Art der Schaltung ab. Man nimmt heute MOSFETs, oder gleich integrierte Treiber wie IFX007T. Da der schon pull down hat, muss man die Eingänge IN und INH nur high ziehen können.
1 | GPIO--+ |
2 | |S |
3 | GND--|I IRLML6344 |
4 | | +12V |
5 | 10k | |
6 | | | |
7 | +-- IN(H) IFX007T--(M)-- GND |
8 | | | |
9 | \_/ LED | |
10 | | | |
11 | -12V -+------------+ |
Peter D. schrieb: > Ja, bei den Footprints gibt es keinen Standard. Na super...das heißt, ich kann mit den Allegros nicht testen, weil ich sie nicht ins Breadboard integriert bekomme.....aaarrrggg....
Angehängte Dateien:
-

20250619_173145.png
24 KB
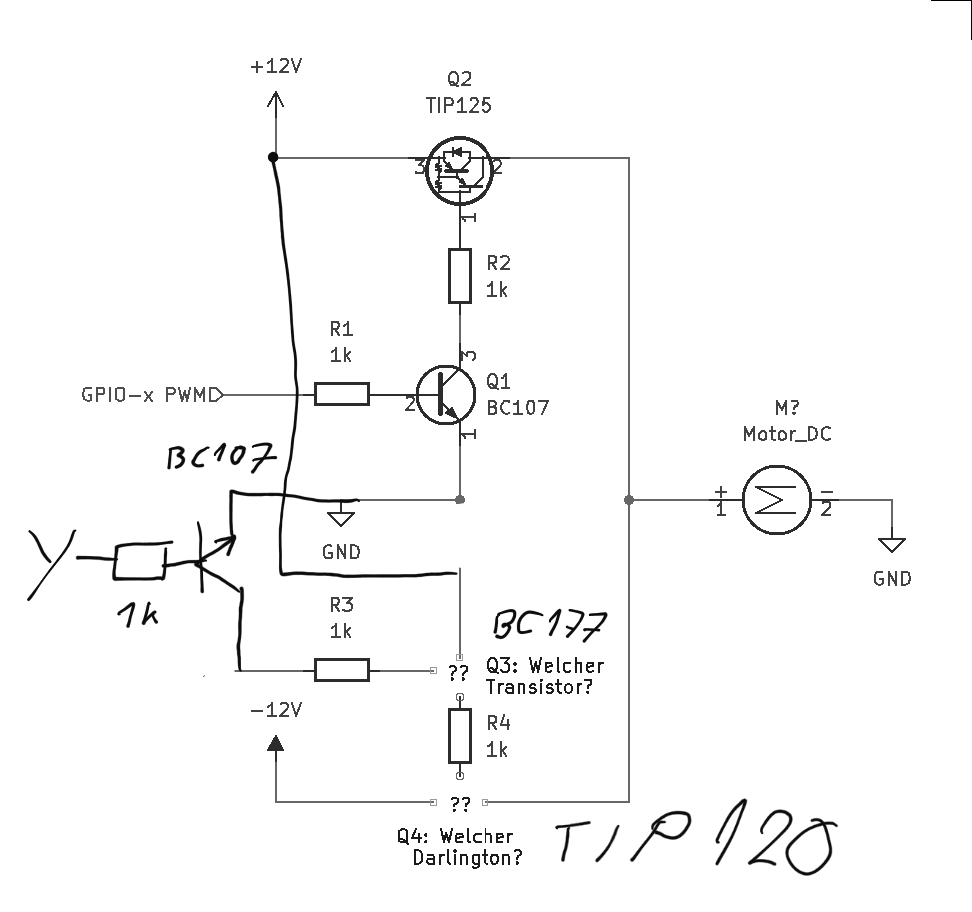
Frank M. schrieb: > Nachdem das mit den -12V ums Verrecken nicht wollte Q3 muss mit seinem Emitter an +12 Volt angeschlossen werden. R3 und R4 könnten eventuell noch auf 2k2 vergrößert werden. Wegen der Übersichtlichkeit habe ich sämtliche Pull-up- und Pull-down Widerstände weggelassen. Eine Verriegelungsschaltung aus vier NOR- oder vier NAND-Gattern sollte noch davor geschaltet werden.
Frank M. schrieb: > Na super...das heißt, ich kann mit den Allegros nicht testen, weil ich > sie nicht ins Breadboard integriert bekomme.....aaarrrggg.... Es gab mal eine Zeit vor den Breadboards, da hatten die Menschen problemlos ihre Elektronik testen können - auch kleine Mikrochips.
Michael B. schrieb: > Frank M. schrieb: >> Da ich die GPIOs selbst programmiere, kann ich sicherstellen, dass das >> PWM-Signal immer nur an x ODER y anliegt, nie jedoch an beiden > > Nein. > Beim Einschalten bis zur Initialisierung sind die GPIO als Eingänge eher > offen und damit undefiniert. Laberkopp - die GPIOs sind in der ersten Phase nach dem Einschalten sehr wohl definiert. Sie befinden sich im High-Z Zustand und um der anzusteuernden Schaltung definierte Pegel zu bieten, helfen einfache Widerstände.
Rainer W. schrieb: >> Beim Einschalten bis zur Initialisierung sind die GPIO als Eingänge eher >> offen und damit undefiniert. > > um der > anzusteuernden Schaltung definierte Pegel zu bieten, helfen einfache > Widerstände. Man definiert also mit externen Widerstanden damit der Pegel des GPIO in der Startphase nicht undefiniert ist. Der GPIO alleine bringt also keinen definierten Pegel. Das hast du jetzt schön bewiesen.
Nemopuk schrieb: > Es gab mal eine Zeit vor den Breadboards, da hatten die Menschen > problemlos ihre Elektronik testen können - auch kleine Mikrochips. Hallo Kleigschußer, wie prototypisierst Du denn eine Schaltung mit einem 1mm-Pitch-SMD? Soll ich da ernsthaft Kabel an die Beinchen löten?
Hallo, Frank M. schrieb: > Soll ich da ernsthaft Kabel an die Beinchen löten? Was stört dich daran? Für einen Prototyp ist das doch in Ordnung. rhf
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.