Vielleicht kann mir jemand helfen, ich habe 5 time of flight (TOF) sensoren TOF050C-VL6180X gekauft, die laufen auch mit der Adafruit_VL6180X library, nur verhalten die sich komplett unterschiedlich: 2 Stück: Bei einer Entfernung von 30 mm zeigt das Script: 0 mm Bei einer Entfernung von weniger als 30 mm zeigt das Script: VL6180X_ERROR_RAWUFLOW "Raw reading underflow" Einer: Bei einer Entfernung von 20 mm zeigt das Script: 0 mm Bei einer Entfernung von weniger als 20 mm zeigt das Script: VL6180X_ERROR_RAWUFLOW "Raw reading underflow" Die anderen beiden: Zeigt das Script ca. die korrekte Entfernung, auch kann man unbegrenzt nah heran gehen ohne den "Raw reading underflow" zu triggern. Ich benötige allerdings für mein Projekt, 4 Sensoren die ca. gleich kalibriert sind, was kann ich machen? Hat jemand eine Idee?
Angehängte Dateien:
-

VL6180X_Perf.png
18 KB
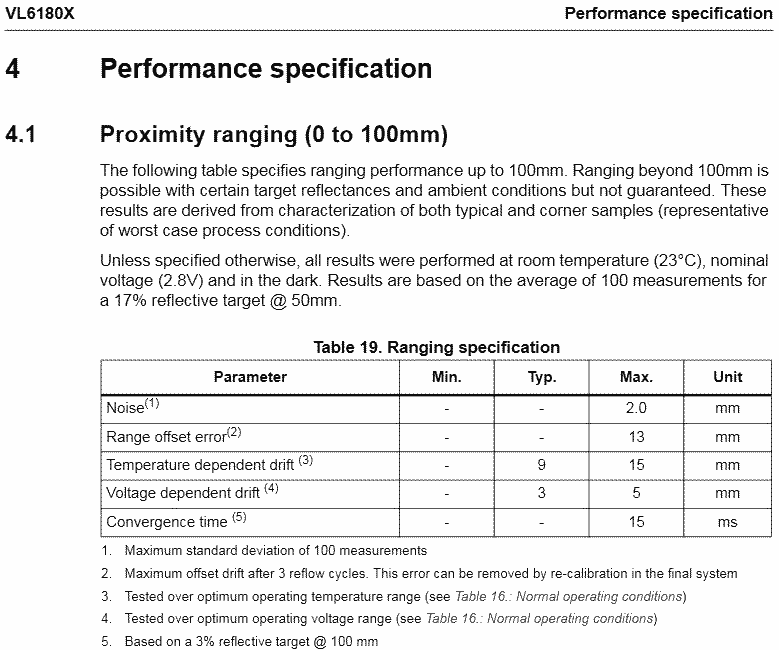
> ich habe 5 time of flight (TOF) sensoren TOF050C-VL6180X gekauft, die > 2 Stück: > Bei einer Entfernung von 30 mm zeigt das Script: 0 mm > > Bei einer Entfernung von weniger als 30 mm zeigt das Script: > Bei einer Entfernung von 20 mm zeigt das Script: 0 mm > > Bei einer Entfernung von weniger als 20 mm zeigt das Script: Für den Messbereich der genannten Sensoren wird von manchen Shops auch 30mm bis 500 mm angegeben. Damit lägen Deine Messungen (kürzer als 30 mm) ausserhalb des zulässigen Messbereiches. Wenn die Sensoren optisch arbeiten stören Reflektionen erheblich, also mal eine andere Umgebung/Untergrund wählen, Abdunkeln könnte auch helfen. Lt. Beschreibung arbeiten die Sensoren im IR-Bereich, also sieht das menschliche Auge nicht die Störquellen. Um IR zu sehen hilft manchmal schon die Kamera eines Handies. Anbei Ausschnitt aus dem Datenblatt, da fällt das starke Rauschen, die starke Temperaturdrift und der Hinweis "in the dark" auf. Ansonsten muss eben die Applikation die Plausibilität der Messwerte ermitteln und entsprechend reagieren. (Auf Ersatzsysteme umschalten, Gerät in sicheren Zustand überführen). * https://www.roboter-bausatz.de/media/pdf/1f/86/22/RBS17667-RBS17668-VL6180X-Datasheet.pdf
Danke für deine Antwort, das Problem für mich ist weniger der Messbereich oder die Fehleranfälligkeit, sondern das die Sensoren komplett unterschiedliche Ergebnisse liefern, z.B. bei 30mm Entfernung, einer 0 mm oder 30mm, ich frage mich auch woher dieser Unterschied stammt, ich habe alle Sensoren in einer Bestellung bei dem selben Händler bestellt.
mach erstmal eine Messreihe mit jedem Sensor. Danach kann man auswerten die genau du das korrigieren musst. Reicht ein Offset-Wert, eine lineare Interpolation zw. den unteren und oberen Höchstwerten, einen Korrekturlinie.... Wenn Sensor1 bei 30mm tatsächlichem Abstand 0mm anzeigt und bei 45mm 15mm und bei 60mm 30mm, dann brauchst du doch nur in der Software den Offset ausgleichen also +30mm
Das würde ja bedeuten das in den Sensoren bereits verschiedene Offset Werte voreingestellt sind? Sollte ich dann nicht diese korrigieren bzw. auf Null setzen können, anstatt die für jeden einzelnen Sensor im Code umzurechnen?
Angehängte Dateien:
-

VL6180X_ErrMsg.png
41 KB -

StreuSchutz.jpg
120 KB
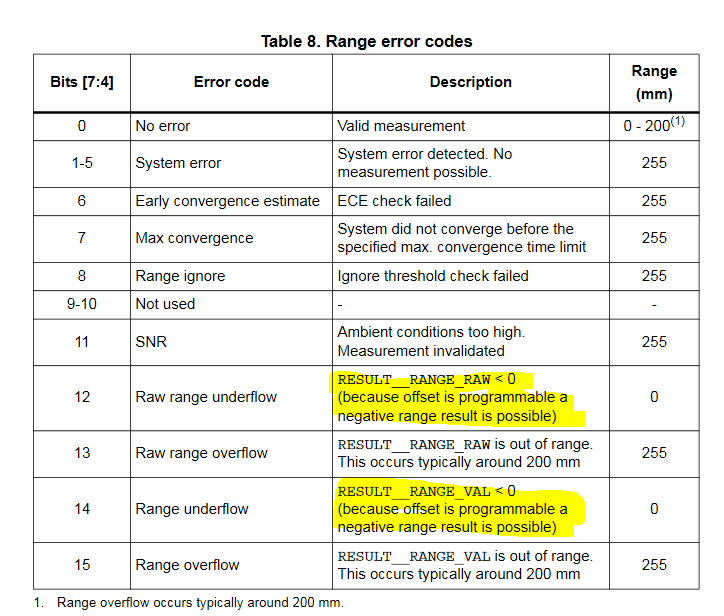
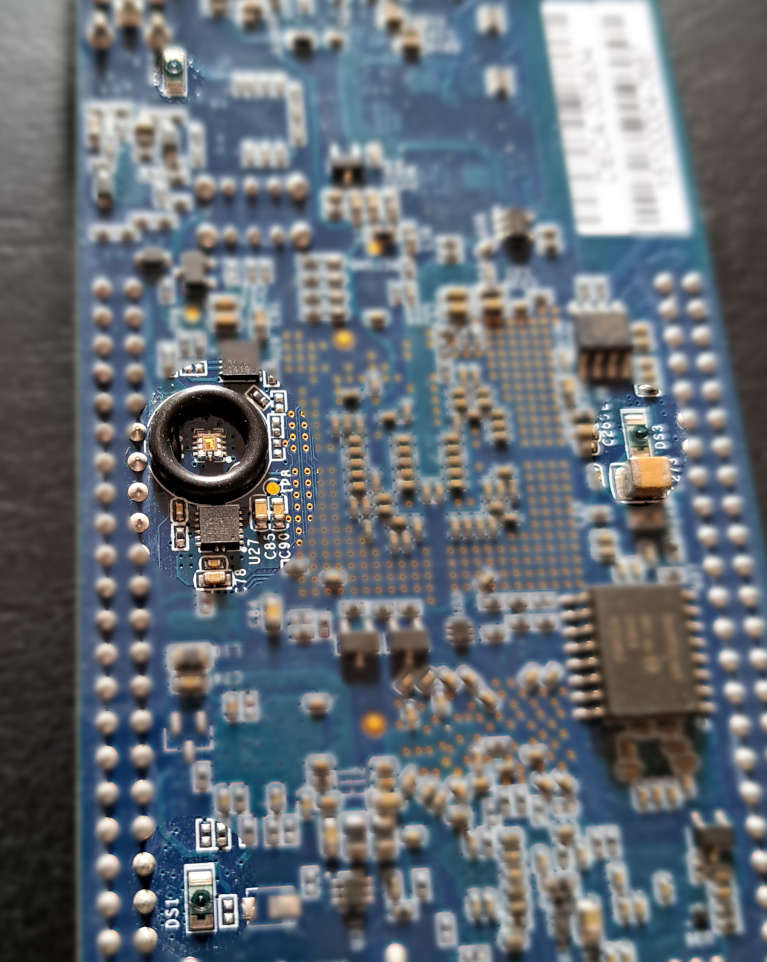
> sondern das die Sensoren > komplett unterschiedliche Ergebnisse liefern, z.B. bei 30mm Entfernung, > einer 0 mm oder 30mm, ich frage mich auch woher dieser Unterschied > stammt, Manche Bauteile werden halt mit grosser Toleranz gefertigt, respektive der Hersteller sortiert diese nicht selbst nach verschiedenen "Qualitätsstufen" aus. Das ist halt ein Massenprodukt für den Handy-Markt und kein Präzessionsinstrument, da muss der Kunde ggf. selbst ausmessen und aussortieren. Und viel scheint auch an dem Einbau zuliegen, bspw. die Proximity Sensoren, die ich auf einem Evalboard gesehen haben, tragen extra Gummiringe um Beeinflussungen durch Streulicht zu minimieren. Die Fehlermeldungen werden wohl vom Sensor erzeugt und nicht vom Treiber "hinzugedichtet". Siehe Datenblatt. Den Offsetfehler kann man wohl durch Kalibrierung korrigieren, mglw. ist der Sensor nie vor Auslieferung kalibriert wurden oder hat seine Kalibrierung vergessen. Falls der Sensor die Kalib-daten überhaubt selbst speichert und nicht der Treiber auf dem (Host-)System. Die Tabelle auf S.35 ist auch interessant, bei geringer Reflexion am Target und heller Umgebung bricht die maximal nutzbare Entfernung zusammen. Eventuell muss das Target einen "Reflector" tragen und die Umgebung muss möglichst dunkel im IR-Bereich sein.
Ich erwarte ja nicht das die Sonsoren super genau sind, wenn jetzt einer 20mm einer 24mm und einer 22mm anzeigt, kein Problem. Nur wenn einer 20mm, einer 0mm und einer error anzeigt, funktioniert das natürlich nicht. Wie kann ich denn den Offset der Sensoren auslesen bzw. setzen, weiß das jemand? Und gibt es noch andere Werte die zu diesen Unterschieden führen könnten, die man in den Sensoren ändern kann?
Moin, schau doch mal, was in den entsprechenden Offset Registern drin steht. Evtl. ist der eine Sensor ein Rückläufer und nicht mehr auf Werkseinstellungen. Grüße
Ich hatte mit anderen STM ToF Sensoren zu tun. Die hatten auch immer einen gewissen Mindestabstand, unter dem die Messung nicht ging. Wenn man den mechanischen Aufbau anders gestaltet, dass immer 30mm Platz vorhanden sind? Man kann die Default-Abstand später ja einfach abziehen. Wenn wir mehrere Sensoren haben, dann gehen wir immer davon aus, dass sie nicht gleich messen. Jedes Sensor bekommt von uns bei der Inbetriebnahme eine individuelle Kalibierung. Die wird dann im Eeprom gespeichert und bei der Auswertung benutzt.
Jannis schrieb: > Das würde ja bedeuten das in den Sensoren bereits verschiedene Offset > Werte voreingestellt sind? > Sollte ich dann nicht diese korrigieren bzw. auf Null setzen können, > anstatt die für jeden einzelnen Sensor im Code umzurechnen? Erstmal könntest du sie mit VL6180x_GetOffsetCalibrationData() auslesen. Eigentlich sollten die Sensoren ab Werk vernünftig kalibriert sein. Die Kalibrierprozedur ist im Datenblatt 2.15.3 Offset calibration procedure beschrieben. Warum willst du im Code umrechnen, wenn der Sensor doch die Rechnung intern durchführt? Wie sieht es bei dir mit den Messbedingungen aus (Dunkelheit, Targetreflektivität, Streuung der Messwerte)?
Wie gesagt, mit einem gewissen Mindestabstand könnte ich leben, laut dem Hersteller sind das 20mm, und mit einer gewissen Ungenauigkeit komme ich auch klar, nur scheinen manche gar keinen Mindestabstand zu haben und andere 30mm, und wieder einer 20mm... Dank eurer Ratschläge, denke ich das es mit dem eingestellten Ofgset zu tun haben könnte, deshalb nochmal die Frage: Wie kann ich denn den Offset der Sensoren auslesen bzw. setzen, weiß das jemand? Und gibt es noch andere Werte die zu diesen Unterschieden führen könnten, die man in den Sensoren ändern kann?
Beitrag #7862666 wurde von einem Moderator gelöscht.
Rainer W. schrieb: > Jannis schrieb: >> Das würde ja bedeuten das in den Sensoren bereits verschiedene Offset >> Werte voreingestellt sind? >> Sollte ich dann nicht diese korrigieren bzw. auf Null setzen können, >> anstatt die für jeden einzelnen Sensor im Code umzurechnen? > > Erstmal könntest du sie mit VL6180x_GetOffsetCalibrationData() auslesen. > Eigentlich sollten die Sensoren ab Werk vernünftig kalibriert sein. > > Die Kalibrierprozedur ist im Datenblatt 2.15.3 Offset calibration > procedure beschrieben. Warum willst du im Code umrechnen, wenn der > Sensor doch die Rechnung intern durchführt? > > Wie sieht es bei dir mit den Messbedingungen aus (Dunkelheit, > Targetreflektivität, Streuung der Messwerte)? Ist die Funktion VL6180x_GetOffsetCalibrationData() Teil der Adafruit_vl6180x libary? Ich möchte nicht im Code umrechnen, das wurde hier mehrfach vorgeschlagen. Die Messbedingungen sind bestimmt nicht Ideal, aber einen so krassen Unterschied zwischen den Modulen rechtfertigen sie sicher nicht. Ich würde also gerne den Offset auslesen und bei festgestellten Unterschieden auf 0 setzen.
Jannis schrieb: > Wie kann ich denn den Offset der Sensoren auslesen bzw. setzen, weiß das > jemand? Natürlich weiß das jemand: der Hersteller! Jetzt würde ich mir das Datenblatt besorgen und da nachlesen und nicht nur eine Lib von Adafruit! Weißt du, ob Limors Damen richtig programmiert haben?
Jannis schrieb: > Ist die Funktion VL6180x_GetOffsetCalibrationData() > Teil der Adafruit_vl6180x libary? Ich habe nicht geprüft, ob die in die Adafruit_vl6180x libary übernommen wurde. Da die Funktion im Datenblatt aufgeführt ist, wird sie wohl in einer vom Hersteller bereit gestellten Bibliothek enthalten sein. Helmut -. schrieb: > Jetzt würde ich mir das Datenblatt besorgen und da nachlesen Da steht drin: Rainer W. schrieb: > ... VL6180x_GetOffsetCalibrationData() zum Auslesen und im Kapitel > ... 2.15.3 Offset calibration procedure die Vorgehensweise zur Kalibrierung
Alles klar, das wird dann wohl zu aufwendig, dann sind die wohl für die Tonne und ich bestell 20 neue, viellt. gehen die ja. Vielen Dank euch trotzdem.
Hallo, Kapitel 2.15.x gibt es nur im VL6180 Manual, nicht im VL6180X Manual. Die originale Lib: https://github.com/stm32duino/VL6180X https://community.st.com/t5/imaging-sensors/vl6180x-offset-and-crosstalk-calibration-method-range/td-p/407993
Jannis schrieb: > Alles klar, > das wird dann wohl zu aufwendig, dann sind die wohl für die Tonne und > ich bestell 20 neue, viellt. gehen die ja. Das ist die vollkommen falsche Reaktion. Auch neue werden Differenzen haben. Zudem die VL6180X hornalt sind. Suche dir wenigstens aktuelle Typen und lese vorher wie man diese einstellt. Du kannst dir meinetwegen 100 Stück kaufen und wirst wieder vor dem alten Problem stehen. Du hast uns damit gezeigt, dass du dich nicht ins Thema einlesen möchtest. Hinweise gab es genügend.
Sagen wir mal, ich habe versucht mich einzulesen und weiß bisher nichteinmal, wie ich den Offset auslesen kann. Ich denke mir halt, die kosten nen Euro pro Stück, und sollten wenigstens einigermaßen funktionieren, wie gesagt, super präzise müssen die nicht sein, und bevor ich die jetzt hier Wochenlang zu kalibrieren lerne, bestell ich halt nen paar mehr?
Jannis schrieb: > Sagen wir mal, ich habe versucht mich einzulesen und weiß bisher > nichteinmal, wie ich den Offset auslesen kann. Ich denke mir halt, die > kosten nen Euro pro Stück, und sollten wenigstens einigermaßen > funktionieren, wie gesagt, super präzise müssen die nicht sein, und > bevor ich die jetzt hier Wochenlang zu kalibrieren lerne, bestell ich > halt nen paar mehr? Dünnbrettbohrer braucht die Welt!
Veit D. schrieb: > Kapitel 2.15.x gibt es nur im VL6180 Manual, nicht im VL6180X Manual. Sorry, da hat sich die Kapitelnummerierung geändert. Im Datenblatt vom VL6180X steht die Kalibrierprozedur im Kapitel 2.8.3 Offset calibration procedure https://www.st.com/resource/en/datasheet/vl6180x.pdf
Helmut -. schrieb: > Jannis schrieb: >> Sagen wir mal, ich habe versucht mich einzulesen und weiß bisher >> nichteinmal, wie ich den Offset auslesen kann. Ich denke mir halt, die >> kosten nen Euro pro Stück, und sollten wenigstens einigermaßen >> funktionieren, wie gesagt, super präzise müssen die nicht sein, und >> bevor ich die jetzt hier Wochenlang zu kalibrieren lerne, bestell ich >> halt nen paar mehr? > > Dünnbrettbohrer braucht die Welt! Das war bestimmt als Kompliment gemeint;)
Ich verstehe das Problem nicht. Der Sensor funktioniert laut Datenblatt erst bei Entfernungen größer als 30mm, und du beschwerst dich, dass die Sensoren unverlässlich bei <=30mm arbeiten, richtig?
Danke für die Info, ich weiß jedoch nicht wie ich die Kalibrierungsprozedur durchführen soll, in den üblichen vl6180x libraries für Arduino gibt es diese Funktionen nicht, und meine Kenntnisse reichen nicht aus um das konplett selbst zu schreiben.
Keks F. schrieb: > Ich verstehe das Problem nicht. > > Der Sensor funktioniert laut Datenblatt erst bei Entfernungen größer als > 30mm, und du beschwerst dich, dass die Sensoren unverlässlich bei <=30mm > arbeiten, richtig? Nicht ganz, das Problem ist das diese sich komplett unterschiedlich verhalten, einige funktionieren auch unter 20mm noch, andere unterhalb 30mm überhaupt nicht und sie zeigen anstatt der 30mm dann 0mm usw. an, in dem Datenblatt steht das diese ab 20mm funktionieren sollten.
Angehängte Dateien:
Keks F. schrieb: > Ich verstehe das Problem nicht. > > Der Sensor funktioniert laut Datenblatt erst bei Entfernungen größer als > 30mm, und du beschwerst dich, dass die Sensoren unverlässlich bei <=30mm > arbeiten, richtig? Laut den Chinesen ist 0-2 cm dead zone
Das Problem ist bei den Datenangaben: ST listet den Sensor als obsolet, Mouser als EOL, und du sagst, du hast einen Euro pro Stück bezahlt. Du hast halt irgendeinen Chinakram, den du am Rande erfundener Spezifikationen betreibst. Der Originalsensor ging von 0-100mm laut Datenblatt auf der Seite von ST. https://www.st.com/en/imaging-and-photonics-solutions/vl6180x.html
Keks F. schrieb: > Das Problem ist bei den Datenangaben: ST listet den Sensor als obsolet, > Mouser als EOL, und du sagst, du hast einen Euro pro Stück bezahlt. Du > hast halt irgendeinen Chinakram, den du am Rande erfundener > Spezifikationen betreibst. > > Der Originalsensor ging von 0-100mm laut Datenblatt auf der Seite von > ST. > > https://www.st.com/en/imaging-and-photonics-solutions/vl6180x.html Ich habe, wie gesagt keine besonderen Ansprüche, die müssen nicht präzise sein, nur wenn einer bei 20mm Abstand, 0mm zeigt, der nächste 20mm, und ein anderer error ist das natürlich ein Problem.
Angehängte Dateien:

Rainer W. schrieb: > Jannis schrieb: >> Laut den Chinesen ist 0-2 cm dead zone > > Das ist der VL6180 (ohne X) Auf den Chips selber steht es mit X, aber ob die Chinesen das so genau nehmen..
Ist wie gesagt einfach irgendein Sensor. Gut möglich, dass du auch mehrere unterschiedliche hast. Jetzt ist natürlich die Frage, was du mit dem Problem genau machen willst. Grundsätzlich würde ich die alle einzelnd vermessen und individuell kalibrieren (wo und wie auch immer). Und je nach "Güte" und Anwendungsfall den Sensor näher oder weiter weg positionieren um die Minimaldistanz auszugleichen.
Keks F. schrieb: > Ist wie gesagt einfach irgendein Sensor. Gut möglich, dass du auch > mehrere unterschiedliche hast. > > Jetzt ist natürlich die Frage, was du mit dem Problem genau machen > willst. Grundsätzlich würde ich die alle einzelnd vermessen und > individuell kalibrieren (wo und wie auch immer). Und je nach "Güte" und > Anwendungsfall den Sensor näher oder weiter weg positionieren um die > Minimaldistanz auszugleichen. Also die Sensoren sind alle aus der selben Bestellung und sehen absolut identisch aus. Das wird nicht möglich sein, ich brauche einfach nur die Messwerte von 4 Sensoren aus der selben Entfernung, es muss nicht super präzise sein, auf den mm kommt es nicht an... Aber wenn ich auf die Werte 0mm, 20mm, error, aus dem selben Abstand komme, ist das natürlich Quatsch..
Jannis schrieb: > Aber wenn ich auf die Werte 0mm, 20mm, error, aus dem selben Abstand > komme, ist das natürlich Quatsch.. Also beschäftige dich mit der Kalibrierung oder sortiere einige aus. Aus 'error' wirst du mit keiner Korrekturrechnung einen vernünftigen Wert erzeugen können.
Rainer W. schrieb: > Jannis schrieb: >> Aber wenn ich auf die Werte 0mm, 20mm, error, aus dem selben Abstand >> komme, ist das natürlich Quatsch.. > > Also beschäftige dich mit der Kalibrierung oder sortiere einige aus. Aus > 'error' wirst du mit keiner Korrekturrechnung einen vernünftigen Wert > erzeugen können. Es wird mir wohl nichts anderes übrig bleiben, 2 der fünf Module funktionieren ja 'normal', die anderen müssen wohl weg... Wenn die bei unter 30mm error liefern und über 30mm dann mit 0mm anfangen, kann ich da auch nichts Korrektur rechnen, da hast du recht. Hab schon beim Ali 10 neue bestellt, hoffentlich laufen die besser, dauert ja auch immer ne Weile.
Rainer W. schrieb: > Jannis schrieb: >> Aber wenn ich auf die Werte 0mm, 20mm, error, aus dem selben Abstand >> komme, ist das natürlich Quatsch.. > > Also beschäftige dich mit der Kalibrierung oder sortiere einige aus. Aus > 'error' wirst du mit keiner Korrekturrechnung einen vernünftigen Wert > erzeugen können. Also wegen der Kalibrierung habe ich so gut wie aufgegeben, ich hab da mal nen vl.setOffset(0x00); ausgeführt, das hat nichts gebracht und ansonsten habe ich keinen Plan welche library ich dafür verwenden kann. Hier habe ich ein ähnliches Problem gefunden: https://forums.adafruit.com/viewtopic.php?t=199602 Aber richtig weitergeholfen hat das auch nicht.
Jannis schrieb: > Also die Sensoren sind alle aus der selben Bestellung und sehen absolut > identisch aus. Naja. Ist halt irgendwie aus gut abgelagerten Restposten zusammengeschustert. Vielleicht noch extra warm gelötet, dass die Oxidschicht besser aufbricht. Jannis schrieb: > ich brauche einfach nur die Messwerte von 4 > Sensoren aus der selben Entfernung, es muss nicht super präzise sein, > auf den mm kommt es nicht an... Aber wenn ich auf die Werte 0mm, 20mm, > error, aus dem selben Abstand komme, ist das natürlich Quatsch.. Musst halt kalibrieren und kucken was noch rauskommt. Ist ja nicht nur der Offset sondern auch die Kompensation fürs Schutzglas. Wunder darfst keine erwarten. Offsetfehler 13mm laut Datenblatt. Dazu nochmal einige mm für die unterschiedliche Sensitivität auf Temperatur / Spannung. Das gleiche auch für die Response je nach Reflektivität. Vor allem wenn das Schutzglas nicht gut ist. 2mm RMS-Rauschen (Einzelmessung auch sicher mal 5mm). Insbesondere im Nahbereich auch noch viele Störungen durch Übersprechen. ... Die Dinger sind für Gestenerkennung. Also Hand nah oder weit weg. Sinnvoll wäre sich zumindest mal an die 20mm Mindestabstand - ggf. plus etwas Reserve - zu halten.
@TO: ein bisschen kann ich Deinen Frust verstehen! Ich habe auch schon mit ToF-Sensoren gearbeitet; die Neueren sind schon aufwendig anzusteuern, und ohne Library ein Riesenaufwand. Aber zum Kalibrieren musst Du da durch! Siehe auch die Kommentare von Harald A. in meinem Thread: Beitrag "Re: Problem mit VL53L0X über P82B96" Gruss Chregu
Christian M. schrieb: > @TO: ein bisschen kann ich Deinen Frust verstehen! Ich habe auch schon > mit ToF-Sensoren gearbeitet; die Neueren sind schon aufwendig > anzusteuern, und ohne Library ein Riesenaufwand. Aber zum Kalibrieren > musst Du da durch! Siehe auch die Kommentare von Harald A. in meinem > Thread: Beitrag "Re: Problem mit VL53L0X über P82B96" > > Gruss Chregu Wie gesagt, mit dem kalibrieren seh ich schwarz, das ist anscheinend zu aufwändig/kompliziert für mich, ich werde jetzt mal die 10 Stück testen, die ich bestellt habe. Könnt ihr sonst etwas empfehlen, das günstig ist und viellt. etwas mehr plug n play, ich benötige halt 4 Messpunkte, diese liegen aber nur so 2 - 4 cm auseinander, Messbereich 0-100 mm reicht
Jannis schrieb: > Also wegen der Kalibrierung habe ich so gut wie aufgegeben, ... Die ganzen Routinen für den Umgang mit den Kalibrierdaten sind in der stm32duino Bibliothek für den Sensor vorhanden (vl6180x_class). Du könntest wenigstens die Kalibrierdaten einmal mit GetOffsetCalibrationData() auslesen. Mit SetOffsetCalibrationData() kannst du neue Kalibrierdaten auch schreiben. Ob der Ambient Light Sensor und dessen Verstärkung in die Entfernungsmessung eingeht, müsste man nachlesen (Verstärkungseinstellung mit AlsSetAnalogueGain()). Auf kurze Abstände kann die Intensität zu einem Problem werden, falls zu viel Licht zurück kommt - hängt natürlich von deinem (geheimen) Target ab. Sooh dick ist das Brett nicht ;-) Vielleicht sind die Sensoren gar nicht ordentlich werkskalibriert, sondern aus Kostengründen nur mit Standardwerten beschrieben. Oder es sind welche, die sich nicht kalibrieren ließen, weil sie außerhalb des Bereichs lagen und deshalb irgendwo vom Band gefallen sind.
Rainer W. schrieb: > Jannis schrieb: >> Also wegen der Kalibrierung habe ich so gut wie aufgegeben, ... > > Die ganzen Routinen für den Umgang mit den Kalibrierdaten sind in der > stm32duino Bibliothek für den Sensor vorhanden (vl6180x_class). > > Du könntest wenigstens die Kalibrierdaten einmal mit > GetOffsetCalibrationData() auslesen. Mit SetOffsetCalibrationData() > kannst du neue Kalibrierdaten auch schreiben. > > Ob der Ambient Light Sensor und dessen Verstärkung in die > Entfernungsmessung eingeht, müsste man nachlesen > (Verstärkungseinstellung mit AlsSetAnalogueGain()). Auf kurze Abstände > kann die Intensität zu einem Problem werden, falls zu viel Licht zurück > kommt - hängt natürlich von deinem (geheimen) Target ab. > > Sooh dick ist das Brett nicht ;-) > > Vielleicht sind die Sensoren gar nicht ordentlich werkskalibriert, > sondern aus Kostengründen nur mit Standardwerten beschrieben. Oder es > sind welche, die sich nicht kalibrieren ließen, weil sie außerhalb des > Bereichs lagen und deshalb irgendwo vom Band gefallen sind. Also in der vl6180 ohne x habe ich auch ein paar Beispiel-Sketches gefunden: https://github.com/stm32duino/VL6180/tree/main/examples Könnt ihr mir viellt. helfen, die auf die vl6180x Bibliothek anzupassen und GetOffsetCalibrationData() auszuführen?
Die sind in punkto Software identisch. https://community.st.com/t5/imaging-sensors/how-have-best-accuracy-at-short-distances-vl6180-or-vl6180x/td-p/188522
Also Jannis, mal ehrlich: ich habe das DB jetzt nicht gelesen, aber bei einem Messbereich von 30 mm - 500 mm würde ich nie auf die Idee kommen, bei 30 mm vernünftige Ergebnisse zu bekommen! Und Du hast bisher auch nicht mitgeteilt, wie die Werte z.B. bei 50 mm aussehen! Du schreibst, die Dinger kosten 1,- EUR und erwartest dann Zeiss-Qualität. Das passt alles nicht! ciao Marci
Marci W. schrieb: > Also Jannis, mal ehrlich: ich habe das DB jetzt nicht gelesen, aber bei > einem Messbereich von 30 mm - 500 mm würde ich nie auf die Idee kommen, > bei 30 mm vernünftige Ergebnisse zu bekommen! Und Du hast bisher auch > nicht mitgeteilt, wie die Werte z.B. bei 50 mm aussehen! > > Du schreibst, die Dinger kosten 1,- EUR und erwartest dann > Zeiss-Qualität. Das passt alles nicht! > > ciao > > Marci Also laut den Chinesen ist der Messbereich 20mm - 500 mm, mein Hauptproblem ist nicht das die Ergebnisse relativ ungenau sind, sondern das ich extreme Unterschiede zwischen den Modulen habe.. habe ich ja auch schon mehrfach die Werte geschrieben, bei zwei Modulen, gibt es zum Beispiel bei allem unter 30mm ein Error und ab 30 mm fängt er bei 0mm an. Bei den anderen beiden kann ich ohne Probleme bis 1mm vor die Platine gehen und er zeigt noch relativ brauchbare Werte an. Wie gesagt, die Qualität ist nicht so wichtig, sie sollte nur darüber liegen, als wenn ich mir einfach irgendwelche Zahlen ausdenke;)
Jannis schrieb: > Also laut den Chinesen ist der Messbereich 20mm - 500 mm, Also Jannis, wenn ich sowas schon lese, also wirklich. Wie naiv bist du eigentlich. Die einzig waren Angaben stehen im Datenblatt/Manual des Herstellers. Egal was irgendwer anderes sagt oder schreibt. Pololu stellt her/vertreibt auch einige Boards mit ToF Sensoren und in deren Angaben steht auch nicht immer alles richtig drin. Kann man übrigens über Eckstein kaufen. Laut STM Manual arbeitet der VL6180X jedenfalls zwischen 0 ... 10cm. Das wars. Alles was über 10cm ist kann funktionieren, muss aber nicht. STM stellt einen VL6180X jedenfalls nicht mehr her. Jahre später noch aus Überproduktion kann ich mir nicht vorstellen. Wer weiß wer die nachbaut. Ich bin schon deshalb skeptisch, weil du schreibst das er unter 3cm 0 oder Müll anzeigt, obwohl er bis 0mm messen können soll. Solchen Schrott würde STM nie verkaufen, da bin ich mir sicher. Ich vermute unterirdische Nachbauten. Ich würde jedenfalls nicht einen hornalten Sensor verwenden. STM hat aktuellere im Angebot, auch welche mit Mehrfachzonenabdeckung. Den Mindestabständen kann man gut trauen. Die maximalen Angaben unterliegen bestimmten Messbedingungen. Ich empfehle dir dich erstmal einzulesen statt mit Ressourcen um dich zu werfen. Ich kann dich verstehen das du zum Ziel kommen möchtest. Nur dein Weg zum Ziel macht für mich keinen Sinn. Man kann nicht erwarten von heute auf morgen zum Ziel zu kommen wenn man das Thema vorher noch nicht kannte.
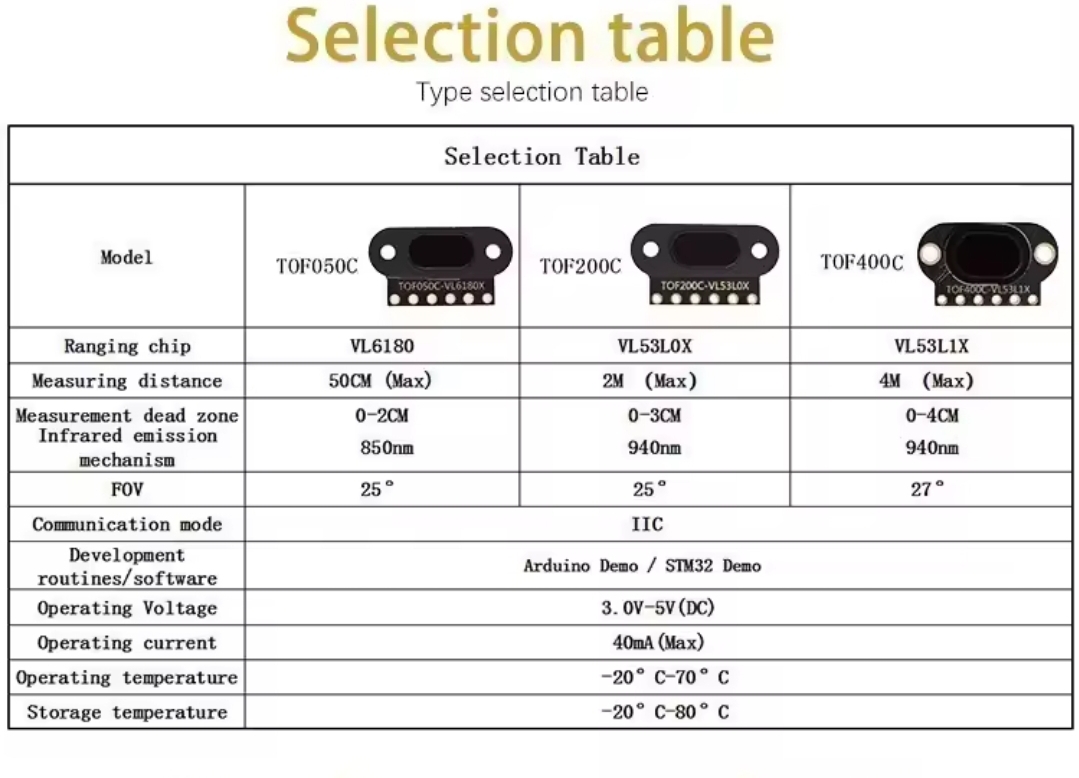
Veit D. schrieb: > Jannis schrieb: > >> Also laut den Chinesen ist der Messbereich 20mm - 500 mm, > > Also Jannis, wenn ich sowas schon lese, also wirklich. Wie naiv bist du > eigentlich. Die einzig waren Angaben stehen im Datenblatt/Manual des > Herstellers. Egal was irgendwer anderes sagt oder schreibt. Pololu > stellt her/vertreibt auch einige Boards mit ToF Sensoren und in deren > Angaben steht auch nicht immer alles richtig drin. Kann man übrigens > über Eckstein kaufen. Laut STM Manual arbeitet der VL6180X jedenfalls > zwischen 0 ... 10cm. Das wars. Alles was über 10cm ist kann > funktionieren, muss aber nicht. Das mit den 0mm, naja. STM stellt einen > VL6180X nicht mehr her. Jahre später noch aus Überproduktion kann ich > mir nicht vorstellen. Wer weiß wer die nachbaut. > > Ich würde jedenfalls nicht einen hornalten Sensor verwenden. STM hat > aktuellere im Angebot, auch welche mit Mehrfachzonenabdeckung. Den > Mindestabständen kann man gut trauen. Die maximalen Angaben unterliegen > bestimmten Messbedingungen. Ich empfehle dir dich erstmal einzulesen Ich denke da missverstehst du mich etwas, also es muß nicht sehr schnell gehen, und ich habe ja auch bereits gefragt, ob ihr Vorschläge zu anderer Hardware machen könnt. Multi-Zonen kommt leider nicht in Frage, wie gesagt, ich benötige 4 getrennte Messpunkte die ca. einen Abstand von 3 cm zueinander haben und eine Range von 0-10 cm wäre perfekt, wenn du da eine Empfehlung für ein neueres Modul hättest was auch noch günstig ist, wäre ich dir auf jeden dankbar!!
Jannis schrieb: > Hab schon beim Ali 10 neue bestellt, hoffentlich laufen die besser, > dauert ja auch immer ne Weile. Wieso das denn? Wieso nicht nach Anforderung Komponente aussuchen und originale bestellen? Ist doch alles Geld-, Zeit- und Ressourcenverschwendung.
Hallo Jannis, ich war bis jetzt sehr zurückhaltend und höflich, dass hat jetzt ein Ende. Ich sage dir direkt, du bist stinkend faul, nichts weiter. Man erkennt bei dir keinerlei Eigeninitiative. Du ignorierst von allen ihre Hinweise im Thread. Wenn du zu blöd bist beim Hersteller zu schauen, danach zu schauen was man davon wo kaufen kann, dann kann man dir echt nicht mehr helfen. Das war mein letzter versteckter Hinweis was DU tun musst. Ich gebe dir keine weiteren Hinweis für irgendwas. Die werden sowieso ignoriert und am Ende kommst du noch mit geht nicht aber du hast es doch empfohlen. Nein Danke. Auf dem Niveau bin ich raus. Ich brate dir keine Tauben die zu dir fliegen. Das klingt jetzt hart, ist es auch, musste gesagt werden.
Veit D. schrieb: > Hallo Jannis, > > ich war bis jetzt sehr zurückhaltend und höflich, dass hat jetzt ein > Ende. Ich sage dir direkt, du bist stinkend faul, nichts weiter. Man > erkennt bei dir keinerlei Eigeninitiative. Du ignorierst von allen ihre > Hinweise im Thread. Wenn du zu blöd bist beim Hersteller zu schauen, > danach zu schauen was man davon wo kaufen kann, dann kann man dir echt > nicht mehr helfen. Das war mein letzter versteckter Hinweis was DU tun > musst. Ich gebe dir keine weiteren Hinweis für irgendwas. Die werden > sowieso ignoriert und am Ende kommst du noch mit geht nicht aber du hast > es doch empfohlen. Nein Danke. Auf dem Niveau bin ich raus. Ich brate > dir keine Tauben die zu dir fliegen. Das klingt jetzt hart, ist es auch, > musste gesagt werden. Musst dich nicht gleich so aufregen, denk an deinen Blutdruck ;) Ich mache das nicht beruflich oder so, ich bastle in meiner Freizeit Sachen mit billig China-Schrott zusammen, mir fehlt also an vielen Ecken einfach das Wissen, bin also eher dumm, als stinkend faul ;))) Da ihr die vl6180x vom Ali mehrfach als unzureichend bezeichnet habt, hatte ich lediglich um eine alternative Hardware Empfehlung gebeten, und nicht das du hier her kommst und mir die Platinen lötest... obwohl??? Bei ner gebratenen Taube?
Jannis schrieb: > mir fehlt also an vielen Ecken > einfach das Wissen, bin also eher dumm, als stinkend faul ;))) Sich auf seiner "Dummheit" auszuruhen, nennt man "Faulheit". Jannis schrieb: > Ich mache das nicht beruflich oder so, ich bastle in meiner Freizeit Gerade dann sollte der Antrieb doch umso höher sein, selber eine Lösung zu finden, und nicht andere zu nerven.
Angehängte Dateien:
{kind=link}
Keks F. schrieb: > Jannis schrieb: >> Hab schon beim Ali 10 neue bestellt, hoffentlich laufen die besser, >> dauert ja auch immer ne Weile. > > Wieso das denn? Wieso nicht nach Anforderung Komponente aussuchen und > originale bestellen? > > Ist doch alles Geld-, Zeit- und Ressourcenverschwendung. Meinst du so was hier? 20 EUR mal x4, ist schon ne Menge Holz, müsste ich mal überlegen, ob ich so viel dafür ausgeben will.
Jannis schrieb: > ... mir fehlt also an vielen Ecken einfach das Wissen Dann arbeite daran und greife die Hinweise auf. Es geht dabei um eine Mischung aus Wissen, Kenntnissen und Übung (z.B. bei dem Umgang mit den Libraries). Übung kommt von üben und nicht von Copy&Paste. Dazu gehört auch der Aufruf einer Funktion aus einer Library und evtl. Anpassung an deinen Prozessor. Die Chinesen sehen es mit Spezifikationen nun einmal etwas lockerer. Wenn du 10 von den Modulen zur Auswahl bestellst, kannst du Glück haben, aber darauf würde ich mich bei Elektronik ungerne verlassen, sondern untersuchen, warum der Nullpunkt nicht hinhaut. Miss die Kennlinie von jedem Sensor über ein paar Punke, guck nach der Kalibrierung oder kauf dir Teile, die sicher funktionieren, die dann aber sicher nicht für untern 1€ bei dir auf dem Tisch liegen.
Rainer W. schrieb: > Dann arbeite daran und greife die Hinweise auf. > Es geht dabei um eine Mischung aus Wissen, Kenntnissen und Übung (z.B. > bei dem Umgang mit den Libraries). Übung kommt von üben und nicht von > Copy&Paste. Dazu gehört auch der Aufruf einer Funktion aus einer Library > und evtl. Anpassung an deinen Prozessor. > > Die Chinesen sehen es mit Spezifikationen nun einmal etwas lockerer. > Wenn du 10 von den Modulen zur Auswahl bestellst, kannst du Glück haben, > aber darauf würde ich mich bei Elektronik ungerne verlassen, sondern > untersuchen, warum der Nullpunkt nicht hinhaut. Miss die Kennlinie von > jedem Sensor über ein paar Punke, guck nach der Kalibrierung oder kauf > dir Teile, die sicher funktionieren, die dann aber sicher nicht für > untern 1€ bei dir auf dem Tisch liegen. Also einmal versuche ich gerade, nach euren Hinweisen, mit der stm32duino Bibliothek den Offset auszulesen, das geht heute nach der Arbeit weiter, parallel dazu habe ich beim Ali halt 10 neue bestellt, viellt. habe ich mit denen mehr Glück, und dann bleibt halt noch originale Kaufen, für 20 eur x4...? und das würde eigentlich schon das Limit für mein Projekt sprengen, ist wie gesagt, nur ein Hobby und wenn ich da hunderte EUR für raus werfe, gibt's Ärger mit meiner Frau :)
Hallo Jannis, das bestätigt weiterhin meine Meinung. Du entwickelst dich hier zum Troll. Du willst weder lesen noch lernen. Statt mit den zugetragenen Informationen zu arbeiten hast du nichts besseres zu tun, wie ein teures STM Entwicklungsboard in den Raum stellen, um damit behaupten zu können alle anderen TOF Boards sind zu teuer. Welches immer noch den alten Sensor hat. Man oh man. Entweder willst du nicht oder kannst du nicht. Oder beides zusammen. Mach dein Ding. Ich lasse dich jetzt in Ruhe. Übrigens, alles was ich mit Elektronik mache ist mein privater Spass. Dauert eben alles paar Jahre.
Veit D. schrieb: > Hallo Jannis, > > das bestätigt weiterhin meine Meinung. Du entwickelst dich hier zum > Troll. Du willst weder lesen noch lernen. Statt mit den zugetragenen > Informationen zu arbeiten hast du nichts besseres zu tun, wie ein teures > STM Entwicklungsboard in den Raum stellen, um damit behaupten zu können > alle anderen TOF Boards sind zu teuer. Welches immer noch den alten > Sensor hat. Man oh man. Entweder willst du nicht oder kannst du nicht. > Oder beides zusammen. Mach dein Ding. Ich lasse dich jetzt in Ruhe. > Übrigens, alles was ich mit Elektronik mache ist mein privater Spass. > Dauert eben alles paar Jahre. Wieso kannst du mir denn nicht einfach nen Board mit einem neueren Chip nennen, was preislich nicht so drüber ist? Wie gesagt, 0-100 mm range würde reichen. Klar informiere ich mich nebenbei auch selber weiter, aber wie du schon richtig erkannt hast,dauert das etwas und wenn du die Infos hast, wieso nicht teilen?
Die Definition von Wahnsinn ist, immer wieder das Gleiche zu tun und andere Ergebnisse zu erwarten. So ungefaehr gehst Du vor. 1) Ganz banal: Der Aufbau. Zeige den Aufbau. Welche Entfernungen willst Du messen? Messfrequenz? Der VL6180x benutzt I2C: Leitungslaenge, Pull-Up-Widerstaende (habe ich auch schon mal vergessen). Albedo der "Messoberflaeche" in IR? 2) Vielleicht gibt es eine alternative Messmethode (z.B. US). Der VL6180x ist mehr fuer Gestensteuerung als Laengenmessung gedacht. 3) Wenn Du der Meinung bist, dass der VL6180x das Selig Machende ist, dann kaufe ein (genau ein) Sensor von einer Quelle mit einer vernuenftigen Reputation (und Hint: AliExpress ist das nicht) und versuche reproduzierbare Ergebnisse zu produzieren. Ist das nicht moeglich: Gehe zu 2) 4) Wenn eine Gruppe Haendler Dir den Sensor fuer 15EUR pro Stueck anbietet, aber eine andere Gruppe das gleiche Produkt fuer 1.5EUR anbietet, koennte es sein, dass es nicht das gleiche ist. Produktfaelschungen sind ein reales Problem. 5) Wir wissen ja auch nicht, ob der MC ein Acht- oder 32-Bitter ist. Die Qualitaet der Bibliotheken im Arduino-Bereich sind manchmal beeindruckend (schlecht). 6) Wir wissen ja nicht, welchen Microcontroller Du benutzt, aber sowohl bei STM32 und auch bei ESP32 gibt es Debugger. Ohne Debugger wuerde ich das im Jahr 2025 nicht mehr machen (verschenkte Lebenszeit). 7) Und Du wirst nicht um RTFM(*) herumkommen. Ansonsten musst Du einfach jemanden bezahlen der Dir ein Geraet baut. Gruesse (*) Falls Dir der Terminus technicus RTFM nicht gelaeufig ist: „read the fine manual", speziell in Deinem Fall https://www.st.com/en/imaging-and-photonics-solutions/vl6180x.html
Jannis schrieb: > Wieso kannst du mir denn nicht einfach nen Board mit einem neueren Chip > nennen, was preislich nicht so drüber ist? Wie gesagt, 0-100 mm range > würde reichen. Vielleicht weil außer dir niemand diesen Bedarf hat?! Guck bei den einschlägigen Chip-Herstellern nach TOF-Sensoren (oder google einfach mal danach). Dann filterst du die Ergebnisse weiter. Anders machen andere es auch nicht.
Jannis schrieb: > Wieso kannst du mir denn nicht einfach nen Board mit einem neueren Chip > nennen, was preislich nicht so drüber ist? Wie gesagt, 0-100 mm range > würde reichen. > Klar informiere ich mich nebenbei auch selber weiter, aber wie du schon > richtig erkannt hast,dauert das etwas und wenn du die Infos hast, wieso > nicht teilen? Weil dir das alles schon mehrfach gesagt wurde. Lese den Thread. Ich wiederhole mich nicht so oft wie du. Oder studierst du in Wirklichkeit Physiologie? Und das Verhalten von uns dient nur deiner Masterarbeit? Weil so blöd kann man sich nicht anstellen wie du es machst.
Veit D. schrieb: > Physiologie? Und das Verhalten von uns dient nur deiner Masterarbeit? Meinst du nicht eher Psychologie? Physiologie hat was mit Sport zu tun. Wobei; dort kommen Wiederholgen auch häufiger vor.
Hallo Rahul, hast recht, Physiologie hat zwar auch was mit Nerven und Reizen zu tun, aber Psychologie ist hier der richtige Begriff für menschliches Verhalten. Danke für die Korrektur. :-)
Jannis schrieb: > für 20 eur x4 Das sind Evaluationsplatinen mit vorgeschriebenem Aufbau und Software. Die sind so teuer, weil der Ingenieur in der Firma, wenn er das selber machen muss, teurer ist. Du möchtest die Platinen selber erstellen und vom China Platinenmann anfertigen lassen, ggf. mit Bestückung dererseits. Der Chip ist dazu immernoch obsolet. Such dir was aktuelles aus nach Filtersuche beim Distributor.
Keks F. schrieb: > Jannis schrieb: >> für 20 eur x4 > > Das sind Evaluationsplatinen mit vorgeschriebenem Aufbau und Software. > Die sind so teuer, weil der Ingenieur in der Firma, wenn er das selber > machen muss, teurer ist. > > Du möchtest die Platinen selber erstellen und vom China Platinenmann > anfertigen lassen, ggf. mit Bestückung dererseits. > > Der Chip ist dazu immernoch obsolet. Such dir was aktuelles aus nach > Filtersuche beim Distributor. Geht der ? https://www.berrybase.de/adafruit-vl53l1x-time-of-flight-distance-sensor-30-to-4000mm
Aber der schafft doch nicht die 0-100mm, die du haben willst?
Jannis schrieb: > Geht der ? > > https://www.berrybase.de/adafruit-vl53l1x-time-of-flight-distance-sensor-30-to-4000mm Sieht da: https://www.st.com/en/imaging-and-photonics-solutions/vl53l1x.html#sample-buy ST hat ihn als "Active" markiert. Dann wird er wohl noch ein paar Tage lieferbar sein.
Keks F. schrieb: > Aber der schafft doch nicht die 0-100mm, die du haben willst? Joa, finde kein Board mit den Vorgaben, ist mir eigentlich auch egal jetzt, schraube ich die Teile halt weiter oben dran.
Jannis schrieb: > Joa, finde kein Board mit den Vorgaben, ist mir eigentlich auch egal > jetzt, schraube ich die Teile halt weiter oben dran. Tolles Schlusswort. Veit D. schrieb: > Ich sage dir direkt, du bist stinkend faul, nichts weiter. Kann man denke ich so sagen. Unverschämt wäre noch ne passende Ergänzung. Hoffentlich klappts nicht und du lernst irgendwas dabei.
Jannis schrieb: > Keks F. schrieb: >> Aber der schafft doch nicht die 0-100mm, die du haben willst? > > Joa, finde kein Board mit den Vorgaben, ist mir eigentlich auch egal > jetzt, schraube ich die Teile halt weiter oben dran. Aber vorhin war das doch keine Option? Dann kannst du doch auch die jetzigen, die du schon hast, nehmen.
Stephan schrieb: > Jannis schrieb: >> Joa, finde kein Board mit den Vorgaben, ist mir eigentlich auch egal >> jetzt, schraube ich die Teile halt weiter oben dran. > > Tolles Schlusswort. > > Veit D. schrieb: >> Ich sage dir direkt, du bist stinkend faul, nichts weiter. > > Kann man denke ich so sagen. Unverschämt wäre noch ne passende > Ergänzung. > > Hoffentlich klappts nicht und du lernst irgendwas dabei. Unwahrscheinlich ;)
Keks F. schrieb: > Jannis schrieb: >> Keks F. schrieb: >>> Aber der schafft doch nicht die 0-100mm, die du haben willst? >> >> Joa, finde kein Board mit den Vorgaben, ist mir eigentlich auch egal >> jetzt, schraube ich die Teile halt weiter oben dran. > > Aber vorhin war das doch keine Option? > Dann kannst du doch auch die jetzigen, die du schon hast, nehmen. Ne, die haben ja immernoch das Problem mit dem Offset, die einen zeigen bei 30mm 0mm an, die anderen 30mm.
Beitrag #7863278 wurde von einem Moderator gelöscht.
Jannis schrieb: > Ne, die haben ja immernoch das Problem mit dem Offset, die einen zeigen > bei 30mm 0mm an, die anderen 30mm. Dann schraub sie so an, dass sie gleich viel anzeigen ...
Rainer W. schrieb: > Jannis schrieb: >> Ne, die haben ja immernoch das Problem mit dem Offset, die einen zeigen >> bei 30mm 0mm an, die anderen 30mm. > > Dann schraub sie so an, dass sie gleich viel anzeigen ... Genau mein Humor ;)
Jannis schrieb: > Rainer W. schrieb: >> Jannis schrieb: >>> Ne, die haben ja immernoch das Problem mit dem Offset, die einen zeigen >>> bei 30mm 0mm an, die anderen 30mm. >> >> Dann schraub sie so an, dass sie gleich viel anzeigen ... > > Genau mein Humor ;) Ist doch bei den neueren genau deine Vorgehensweise? Und Software Kalibrierung, wie auch immer implementiert, wolltest du auch nicht. Ich komm mir da auch verarscht vor.
Keks F. schrieb: > Jannis schrieb: >> Rainer W. schrieb: >>> Jannis schrieb: >>>> Ne, die haben ja immernoch das Problem mit dem Offset, die einen zeigen >>>> bei 30mm 0mm an, die anderen 30mm. >>> >>> Dann schraub sie so an, dass sie gleich viel anzeigen ... >> >> Genau mein Humor ;) > > Ist doch bei den neueren genau deine Vorgehensweise? Und Software > Kalibrierung, wie auch immer implementiert, wolltest du auch nicht. > > Ich komm mir da auch verarscht vor. Ich habe doch nun mehrfach geschrieben, das ich mich noch mit der STM32DUINO Bibliothek auseinandersetzen muss, um das Problem mit dem Offset bei den Modulen zu lösen, das wurde mir doch hier auch so geraten, das nimmt halt nur etwas Zeit in Anspruch, weil ich mich da erstmal reinarbeiten muss. Dann habe ich 10 neue Steine beim Ali bestellt, wenn da noch 2 dabei sind die keinen weg haben, hätte ich ja schon genug Material. Dann habt ihr mehrfach geschrieben der Chip ist veraltet und von Ali ist eh shice.. und ich dachte einfach einer könnte mir nen Link schicken was ich stattdessen nehmen könnte, aber das scheint ja hier nen Ding der unmöglichkeit zu sein. Da ich da nicht wirklich was erfahren habe, würde ich es wohl, wenn das mit den China-steinen nichts wird, es nochmal mit den Adafruit vl53l1x versuchen, obwohl die schon übelst teuer sind.
Jannis schrieb: > ... es nochmal mit den Adafruit vl53l1x versuchen, obwohl die schon > übelst teuer sind. https://de.aliexpress.com/item/1005006742107504.html https://de.aliexpress.com/item/32737314325.html No risk - no Fun ;-)
Hallo, nur so als Info, wenn man das VL53L1CX (VL53L1X) Manual lesen würde. 7.3 Minimum ranging distance The minimum ranging distance ensured is 4 cm. Under this minimum distance, the sensor detects a target, but the measurement is not accurate. Ich meine so viele 1 Zonen ToFs gibts bei STM nun auch nicht das man sich nicht alle durchlesen könnte.
Veit D. schrieb: > Hallo, > > nur so als Info, wenn man das VL53L1CX (VL53L1X) Manual lesen würde. > 7.3 Minimum ranging distance > The minimum ranging distance ensured is 4 cm. Under this minimum > distance, the sensor detects a target, but the measurement is not > accurate. > > Ich meine so viele 1 Zonen ToFs gibts bei STM nun auch nicht das man > sich nicht alle durchlesen könnte. Joa, als fertige Module gibt's ja eh nur nen paar zur Auswahl, im Prinzip bleibt nur der VL6180X für short, und vl53l1x für long range.. werde ich die halt checken und gut 👌
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.