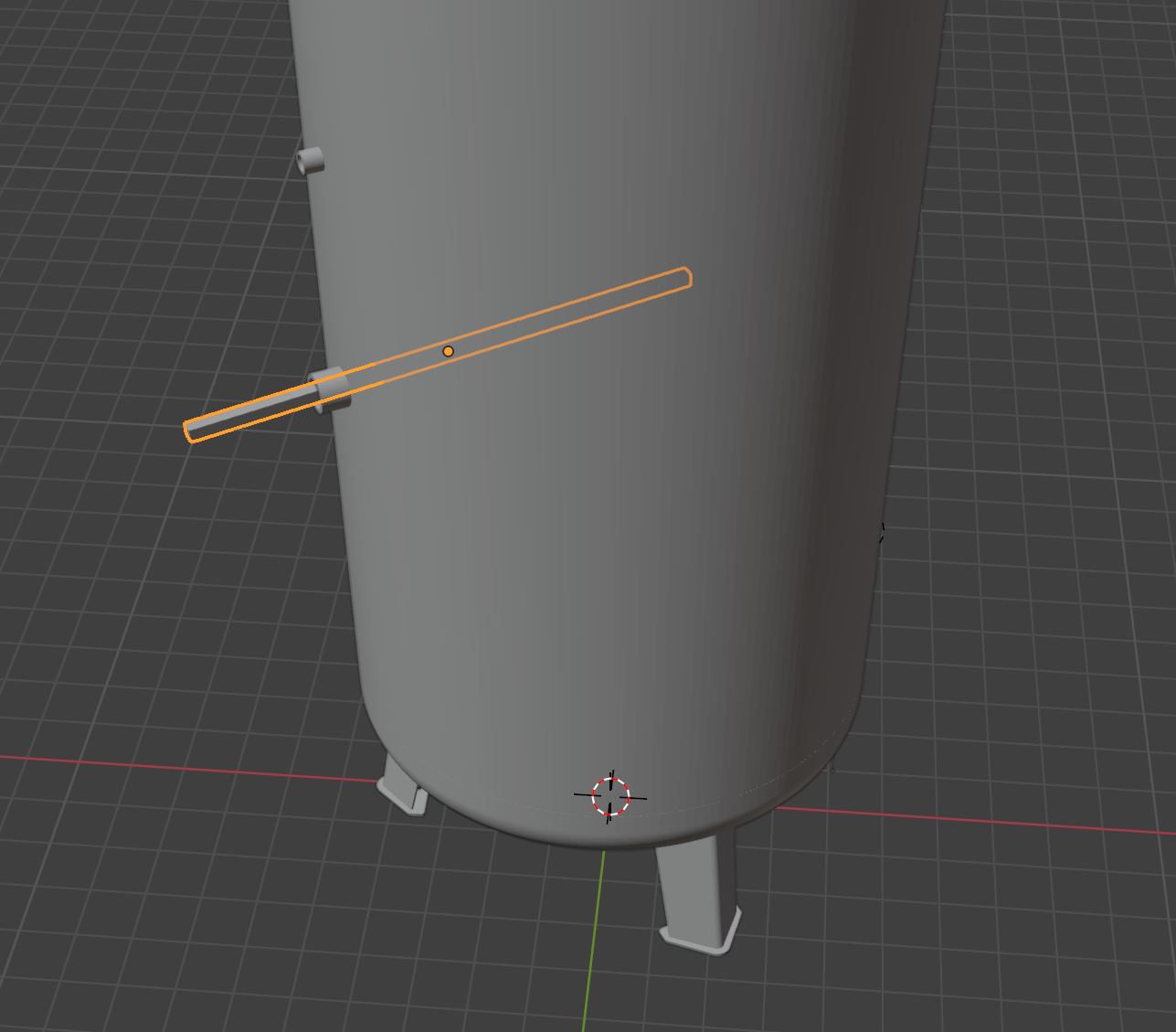
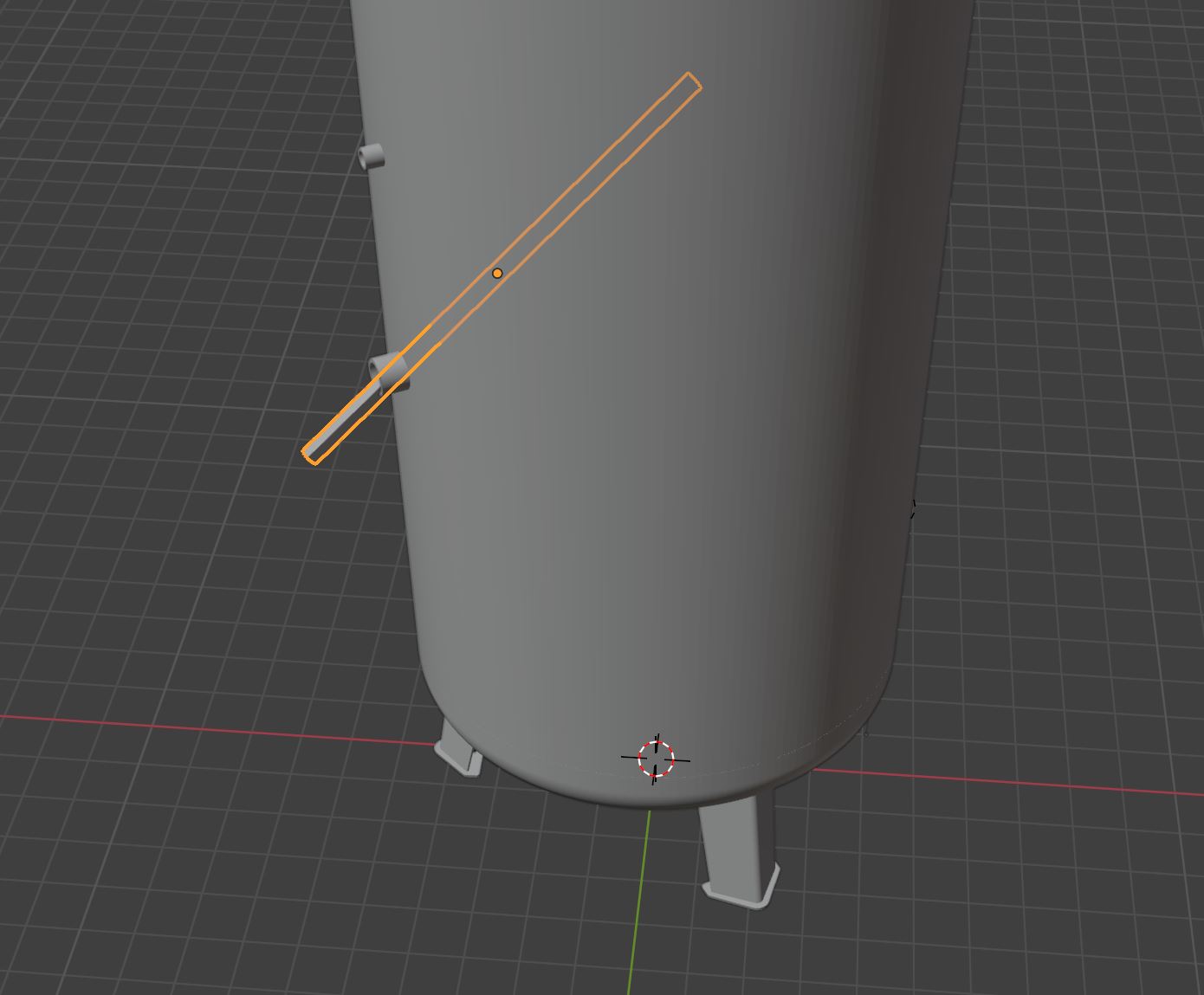
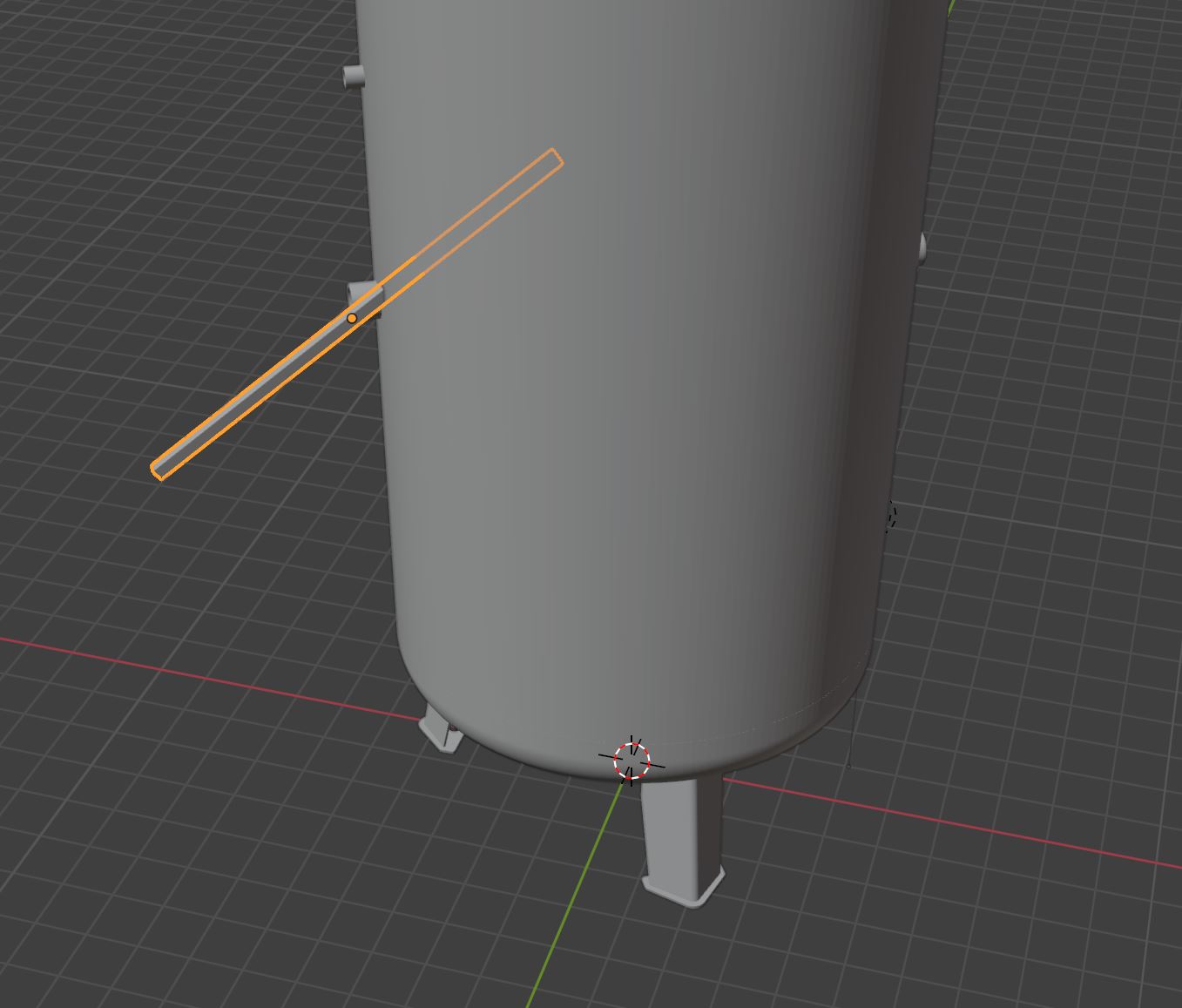
Hallo Forum, ich habe folgendes Projekt und hoffe ihr habt ein paar Ideen / Denkanstöße: wir haben einen Bioreaktor (ausgemusterter 210L Edelstahl-Druckbehälter) in welchem drei mal täglich zur Probennahme eine Sonde (8mm Durchmesser, 20cm Lang) eingeführt wird. Nun ist es für die spätere Auswertung relevant wo sich die Sonde bei der Probennahme befand und welchen Weg sie genommen hat (Ziel des Forschungsprojektes ist die Bestimmung des Aufenthaltsortes bestimmter Mikroorganismen in verschiedenen Zonen des Behälters). Bisher haben wir das relativ aufwändig manuelle gelöst (messen von zwei Winkel + Eindringtiefe + Geschwindigkeit), da sich nun aber die Zahl der Reaktoren erhöhen soll würde ich die Probennahme gerne elektronisch mitloggen. Zur Verdeutlichung habe ich quick and dirty ind Blender ein Modell erstellt. In einem ersten Versuch habe ich ein Gyrometer auf die Sonde gesetzt, in der Hoffnung darüber den Weg nachzuverfolgen. Leider war das Ergebnis nicht genau genug. Der äußere Teil des Behälters kann beliebig verändert werden, das Innere nicht. Könnt ihr mir helfen? Euer Tommes
Angehängte Dateien:
-

Probe_1.JPG
74 KB -

Probe_2.JPG
83 KB -

Probe_3.JPG
93 KB
Tommes schrieb: > Der äußere Teil des Behälters kann beliebig verändert werden, > das Innere nicht. Kann man die Farbe des Deckels verändern? Dann liesse sich der Platz des Behälters mit einem Farbsensor leicht detektieren.
Woow vielen Dank für die schnelle Antworten - ich hätte eher geantwortet aber leider habe ich ein Limit von 30 Minuten. Der Sensor wird händisch bewegt, meist von unterschiedlichen Personen da Probennahme alle 8h erfolgt. Die Farbe des Deckels kann geändert werden, wie genau stellst du dir die Messung vor? Ich kann es mir leider nicht ganz herleiten. Als Ergänzung: die Sonde wird nach jeder Probennahme autoklaviert, wobei man etwaige Sensoren natürlich abnehmbar designen kann.
Es steht nichts zur Genauigkeit, daher mal ein Versuch: Wenn die Probe mit Ringen versehen werden darf, kann an der Einstichstelle der Probe ein Zähler montiert werden. Je nach Anzahl der Ringe, kannst du die Eindringtiefe ermitteln. Mit einem Winkelsensor kann dann noch die Höhe berechnet werden. Der Sensor kann am Anfang, oder auch am Ende der Probe angebracht werden, so dass er gar nie in den Kessel rein muss. Jetzt da ich es so formuliere, man könnte auch die Eindringtiefe mit einem Lasermessgerät von hinten der Probe messen. Dann misst man die Distanz bis zum Kessel und weiss, je näher man dran ist, desto tiefer sitzt die Probe.
ich würde mit etwas Abstand eine Platte mit Löchern an bringen. Je nachdem durch welches Loch die Sonde gesteckt wird, liegt die Richtung schon mal fest. Ein Maßstab auf der Sonde ode4 ein paar Markierungen zeigen die Einstecktiefe. Dann musst du nichts messen, sondern kannst die Sonde gezielt an die gewünschte Position bringen
Getto Lösung: Wiimote ans Ende der Stange kleben, Sensorbar irgendwohin legen.
Drei Seilzugsensoren vom hinteren Ende der Sonde zu drei geeigneten Stellen am Bottich . Die drei Längenwerte aufzeichnen. Aus Einstichort und Sondenlänge und Position der Sensoren/Seile am Bottich ist dann der Weg (und Geschwindigkeit) durch das Medium berechenbar. Je nach Qualität sind die nicht gerade günstig, aber wenn die Sensoren am Probenrohr fixiert werden und an den Bottichen je drei (farbig markierte) Fixierungen (Magnet?) sind, braucht man nur drei. Je nach Geometrie und Spiel muss man halt schauen, ob der Fehlerschlauch passt.
Tommes schrieb: > In einem ersten Versuch habe ich ein Gyrometer auf die Sonde gesetzt, in > der Hoffnung darüber den Weg nachzuverfolgen. Leider war das Ergebnis > nicht genau genug. Probiere es einmal mit einem 3D-Beschleunigungssensor für die Richtung und einem Wegsensor für die Einstecktiefe. Wie genau muss die Position denn bestimmt werden?
Aussen eine Art analoger Joystick (Rohr durch den der Sensor gesteckt wird) anbauen dessen X- und Y-Lage über z.b. Potis bestimmbar ist. Wenn der Sensor immer nur waagerecht eingeführt wird, reicht eine Achse. Die Einstecktiefe könnte man über ein mitlaufendes Reibrad bestimmen.
Muss die Probe von der Seite entnommen werden, oder geht es auch von oben? Wäre einfacher, wenn man von oben (ein ebener Deckel vorausgesetzt) da reinkommen könnte. Da könnte man einen einer Kugelmaus entsprechenden Winkelgeber draufsetzen. Loch durch die Kugel, in das die Sensorlanze passt, und du kannst den Sensor beliebig auf x und y bewegen und erfasst die Kugelbewegungen, wie bei einer alten IBM-Maus über optische Drehsensoren. Die Z-Achse kannst du dann eventuell mit Markierungen optisch inkrementiell an der Lanze auch abfragen, die müssen dann aber eingraviert oder gelasert sein, wenn du die nach jeder Probenentnahme autoklavieren musst. Nur mal so als Gedankenanstoss. Wäre auch vom Handling her besser als eine Probenentnahme von der Seite, weil da dann nichts herauslaufen kann. Ich unterstelle dir ja jetzt mal nicht, dass du da tödliche Mikroben züchtest :-) Spass.
Tommes schrieb: > messen von zwei Winkel + Eindringtiefe + Geschwindigkeit), da sich nun > aber die Zahl der Reaktoren erhöhen soll würde ich die Probennahme gerne > elektronisch mitloggen Na ja, du kannst doch die Winkel und Eindringtiefe auch elektronisch erfassen. Da gibt es eine Vielzahl von fertigen Lösungen je nach Genauigkeit und Anbaumoglichkeiten. Die werden natürlich aussen angebracht an einem Führungsröhrchen für die Sonde, damit sie nicht dem Druck und Dreck ausgesetzt werden.
Herzlichen Dank für die rege Diskussion, wir haben uns heute Mittag zusammengesetzt und die Vorschläge durchgesprochen. Vorher möchte ich aber noch die aufgetretenen Fragen beantworten - Genauigkeit, es reicht +-1cm auf jeder Achse - Die Entnahme ist leider nur durch eine der Öffnungen möglich (kurzer Exkurs: bei ersten Tests hatten wir tatsächlich von oben entnommen, dabei traten aber zum einen Probleme mit der Sonde auf – diese musste nun deutlich länger sein – zum anderen kam es zu einer unerwünschten Durchmischung) - Die Sonde muss frei beweglich sein da die Sonde immer erst zur Hälfte horizontal eingeführt werden muss und dann erst in den relevanten Bereich geführt werden kann, ebenfalls ein Problem der Durchmischung. Wie erwähnt haben wir heute Mittag über die Lösungsvorschläge diskutiert und werden nun zum einen Versuche mit einem 3d Beschleunigungssensor durchführen zum anderen klang die Idee mit einem „analogen Joystick“ bzw. das elektronische Erfassen von Winkel und Eindringtiefe. Wir haben uns mal ein paar Analoge Joysticks angeschaut, so wie wir es uns vorstellen könnten, wäre den Joystick in der Mitte auszubohren und stattdessen eine Hülse einzusetzen durch welche dann die Probensonde geführt wird bevor sie in den Probenbehälter eindringt. Was wir nicht gefunden haben sind Joysticks mit einem ausreichend großen Innendurchmesser um die 8mm Sonde+Hülse durchzubekommen. Evtl. wäre auch eine 18mm Öffnung gut dann könnten wir ihn direkt über die Dichtung führen. Interessant wäre hier natürlich auch mögliche Fertiglösungen.
Ich könnte mir vorstellen, dass das Ziel mit einer Art "passivem" Roboterarm erreichbar sein sollte, der die Trajektorie über den Verlauf der Gelenkwinkel abbildet. So wie hier (nur einfacher, da Du vermutlich durch die Blende weniger Freiheitsgrade brauchst); https://www.mdpi.com/1424-8220/23/5/2450 Oder im 3d-Druck: https://www.youtube.com/watch?v=diVXbuRislM
wir hatten für ein anderes Projekt einen Messarm von Faro: wirklich hervorragendes Gerät und interessante Technik allerdings viel zu genau (und damit zu teuer) sowie klobig für dieses Projekt hier
Tommes schrieb: > ... Versuche mit einem 3d Beschleunigungssensor durchführen > ... > bzw. das elektronische Erfassen von Winkel und Eindringtiefe. Nur damit keine Missverständnisse aufkommen: Mit einem 3D Beschleunigungssensor erfasst du die Winkel. Die Dynamik des Einführvorgangs bekommst du damit wohl kaum ausreichend genau zu fassen. Die Eindringtiefe brauchst du zusätzlich.
Mindestens 3 Marker auf die Sonden kleben. Dann mit 2 Kameras filmen (Video, nicht nur ein Photo). So kann man exakt die räumliche Position der Sonden zu jeder Zeit bestimmen: Position, Winkel. Und wenn man mehrere Bilder nimmt, auch noch die Geschwindigkeit.
+-1cm auf 20cm Weg im Raum ... da reichen drei Poties zur Winkelmessung. Mit zwei Schenkeln (Zirkel) und Poti zur Länge. oder eben Seilzug (günstige sind bei ~80€/Stck) (In den alten Y/X Papierschreibern sind die auch drin, mal in der Bucht oder im Keller suchen?) Schaut euch mal die Mechanik von einem Kreuzpoti an. Dann dem Mechaniker in der Werkstatt zeigen und ein Sondenrohr da lassen.... macht die zwei Winkel. Oder Ihr macht es wie beim Spiel am Heißen Draht. Mit einem vorher gebogenen Alu/Stahl Profil mit Gleiter dran den Weg der Sonde vorgeben. Ganz profan ohne Strom...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.