Hallo zusammen, ich habe mich bereits ein wenig im Forum umgesehen, konnte jedoch kein passendes Topic finden. Kurz zu meinem Vorhaben, anschließend meine Frage: Ich möchte gerne mit 4 Positionssensoren eine Ebene aufspannen (also Sensor 1 bspw. an P1(0|0), Sensor 2 an P2 (1|0), usw.). Aus den Positionen zweier weiterer Positionssensoren soll eine Gerade gebildet werden. Nun möchte ich visualisieren, in welchem Punkt die Gerade die Ebene schneidet. Diese Auswertung soll von einem separaten Controller (Arduino, Rapsberry Pi, ...) durchgeführt werden und an einen Bildschirm weitergegeben werden. Die Genauigkeit sollte hierbei bestenfalls <30cm sein, aber auch ca. 10 m noch beherrschen können. Das Ganze softwaretechnisch ist wohl weniger mein Problem, aktuell scheitert es eher an der Sensorsuche. Gibt es für mein geplantes Vorhaben überhaupt entsprechende Sensoren? Welche würden sich anbieten? (Kann man sich bei Keyless-Go von Fahrzeugen etwas abschauen? Das scheint ja auch recht genau zu funktionieren). Optimal wäre natürlich, wenn jeder Sensor mit einem kleinen Akku und µC auskommen würde und dementsprechend eigenständig wäre. Heißt: Sensor 1-4 an 4 Ecken platzieren, 5 und 6 sind im Bestfall schon kombiniert und je nach Ausrichtung erzeugen diese eine Gerade. Oder gibt es auch noch ganz andere Möglichkeiten (Laser, Lichtschranke, ...??). Alternativ wäre auch eine Idee, anhand vier Sensoren zu bestimmen, wo ein gewisser Volumenstrom die Ebene durchtritt. Hierzu fehlt mir jedoch jeglicher Ansatzpunkt. Ich danke euch vielmals! VG
So viele offene Fragen. Eine Zeichnung wirkt Wunder. Oder wenigstens eine Erläuterung, was das überhaupt am Ende werden/ messen soll. Ich probiere es trotzdem mal: Deine Ebene ist eine Gedachte. Deine Positionssensoren "5 und 6" sind Piezoaufnehmer. Rund um Deine gedachte Ebene platzierst Du ausreichend viele Piezo-Sender. Mittels Laufzeitkorrelation erfasst Du die Positionen der Piezoaufnehmer relativ zur Ebene und errechnest damit die Position, an der die errechnete Gerade zwischen den beiden die gedachte Ebene kreuzt.
Die Umgebungsbedingungen sind relativ wichtig, die sollten gerne genauer definiert werden. Je nachdem, wie diese gestaltet sind, kommen einfache Lösungen (z.B. EINE overhead-Kamera, für kurze Anwendung ggf. auch mit einer Drohne) infrage, aber wenn du die Erkennung für schnelle Bewegungen in einer lauten dunklen verrauchten Umgebung mit offenen Lichtbögen haben willst, wird's eben ein kleines bisschen schwieriger. Wenn es Dir darum geht, die Ausrichtung und (x,y)-Position eines Stabes zu erfassen, wird es ja etwas leichter. Die Ausrichtung des Stabs lässt sich z.B. über einen Kompass und ein Accelerometer bestimmen. Jetzt brauchen wir nur noch die Position des Stabes auf der Ebene, das geht über Laufzeitortung--entweder akustisch, per Licht oder Funk (z.B. UWB-Positionierung). Der Trick hierbei ist natürlich, dass du nicht die genaue Position zweier Sensoren im Raum bestimmen musst, sondern nur die Position eines Punktes deines Stabes, da du die Orientierung des Stabes aus den dort eingesetzten Sensoren erhältst, die die Orientierung mehr oder weniger direkt messen und diese nicht aus xyz-Koordinaten bestimmen musst. Die 4 Sensoren für deine Ebene erlauben dir nämlich auch nicht, die z-Koordinate eindeutig zu bestimmen, da die Laufzeiten zweier Signale in einer bestimmten Entfernung über und unter der Ebene identisch sind.
Angehängte Dateien:
-

Skizze.png
660 KB
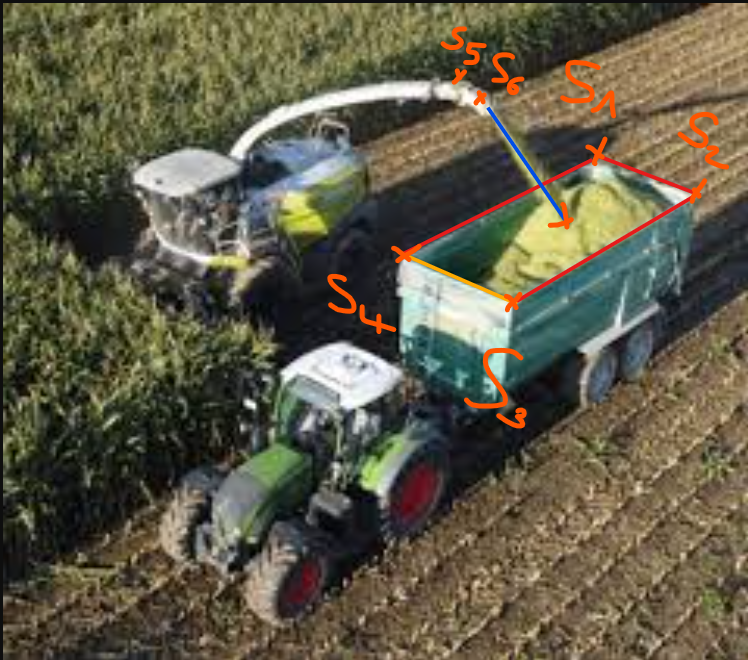
Danke schon einmal für eure Antworten. Um das ganze noch in den realen Kontext einzuordnen: ich möchte versuchen, die Position des Häckselguts (oder überhaupt die Ausrichtung des Auswurfrohrs) eines Feldhäckslers in Bezug auf den zu befüllenden Anhänger zu bestimmen. Sowohl der Anhänger als auch der Häcksler sind natürlich in ihrer Position variabel und dynamisch. Anbei noch eine Skizze.
Schon mal mit Sensor S7 (Aussenspiegel beifahrerseitig) probiert? :) Spaß beiseite: das Auswurfrohr erhält einen bzw. mehrere Linienlaser, sodass es ein Zielkreuz bildet. (Das Häxxelgut würde einen einzelnen Laser immer irgendwo beschatten.) Die Kreuzmitte zeigt auf das Zielgebiet beim Befüllen. Auf den Oberkanten der Anhängerwände platzierst Du auf die Wellenlänge des Laserlichts angepasste Photodiodenarrays. Jederzeit müsste dann je Seitenwandarray ein Punkt zu bestimmen sein, der gerade angestrahlt wird, daraus kannst Du die Kreuzmitte bestimmen.
Nein, S7 ist leider defekt. Spaß beiseite, das Ganze soll eher "nice to have" sein. Gerade bei unerfahrenen Fahrern wird es doch öfters mal spannend ab einer gewissen Anhängergröße :) Der reale Nutzen wird sich zeigen (oder auch nicht). Das Problem ist nur, dass ich mir die Umsetzung jetzt irgendwie in den Kopf gesetzt habe aber keinen wirklichen Startpunkt habe (und aktuell auch überhaupt nicht einschätzen kann, ob es in dieser Art überhaupt umsetzbar ist) :D Dein Vorschlag hört sich schon recht interessant und schlüssig an, denke das wäre ein gangbarer Weg..
Peter G. schrieb: > denke das wäre ein gangbarer Weg.. Findest Du? Die Frage ist: geht das System schon kaputt bevor es zum ersten mal, also so nach spätestens einer Stunde, komplett verdreckt?
Das Thema soll im Zuge einer studentischen Arbeit meines berufsbegleitenden Masters bearbeitet werden. Daher sind die Rahmenbedingungen recht fix (Häckselgutstrahl in Anhänger lokalisieren und visualisieren). Stelle ich mir aber aktuell noch recht anspruchsvoll vor für den entsprechenden Umfang. Daher bin ich noch am überlegen, ob ich das Thema überhaupt nehme. Rückfahrkamera wäre vermutlich trotzdem keine 100%ige Lösung, da der Abstand zwischen Häckselstrahl und rückseitiger Bordwand wohl immernoch schwierig einzuschätzen wäre (und bei Nacht noch schwieriger). Das Problem bezüglich der Verschmutzung habe ich mir auch schon überlegt, daher war ich ursprünglich eher bei Positionssensoren, da ich die gedanklich einfach sicher "verpacken" kann. Wenn ich jetzt nocheinmal so darüber nachdenke, wird es wohl auch schwierig aus mehreren Lasern ein Zielkreuz zu machen. Der Abstand zwischen dem Rohr und dem Anhänger variiert ja immer, heißt ich müsste auch die Ausrichtung der Laser dynamisch anpassen..
Peter G. schrieb: > Abstand zwischen Häckselstrahl und rückseitiger Bordwand Ist der Abstand zu den Seitenwänden überhaupt wichtig oder fahrt ihr sowieso geradeaus, sodass es vielleicht nur die Position "auf der Längsachse" ankommt?
Ich sag's mal so: Optimal wäre es natürlich, wenn das ganze in Längs- und Querachse visualisiert werden würde. Ehrlich gesagt kann man den Abstand zu den seitlichen Bordwänden aber recht einfach erkennen.. Hauptaugenmerk wäre daher auf der Längsachse, optional eben inkl. Querachse
Je Ecke ein Ultraschallentfernungsmesser auf dem Anhänger (S1…S4) Einmal reihrum die Entfernungen messen und aus den ermittelten Entfernungen die Position des einfallenden Heckselguts bestimmen. Die Sensoren dabei evtl. etwas nach oben ausrichten, so dass die gegenüberliegenden Wände und bereits im Anhänger befindliches Gut nicht erfasst werden. Gruß Jobst
Peter H. schrieb: > Hauptaugenmerk wäre daher auf der Längsachse Guck dir die Doku (ich glaube N24) über Rollbomben oder Dambuster der RAF im WW2 an. Um die richtige Abwurfhöhe zu ermitteln hat der entsprechende Bomber mittels zweier divergierender Lichtstrahlen Lichtpunkte auf die Wasseroberfläche projiziert. Die Entfernung der Punkte variiert mit der Höhe des Bombers. Du könntest: vom Auswurfrohr zwei Lichtpunkte nach hinten schräg runter auf die hintere Bordwand projizieren. Der Abstand der Punkte ist ein Maß für den Abstand des Auswurfrohres zur Bordwand. Ein schlichter optischer Sensor an der vorderen Bordwand kann den Abstand der Punkte ermitteln und daraus die Lage des Rohres errechnen. Ich glaube, so ein Sensor war in der Nintendo Wii verbaut. Habe ich einst mit gespielt, geht ziemlich easy. Die Ausgabe der Koordinaten war über TWI.
Jobst M. schrieb: > Je Ecke ein Ultraschallentfernungsmesser auf dem Anhänge Das werde ich mir auch notieren. Wenn man die Verschmutzung in den Griff bekommt, wäre das bestimmt ein Versuch wert. Stephan R. schrieb: > vom Auswurfrohr zwei Lichtpunkte nach hinten schräg runter auf die > hintere Bordwand projizieren. Der Abstand der Punkte ist ein Maß für den > Abstand des Auswurfrohres zur Bordwand. Wobei das ja auch nur funktioniert, wenn das Auswurfrohr immer orthogonal (bzw. In einer fixen Winkellage) zur hinteren Bordwand steht. Das ist ja leider nicht der Fall. Ggf. könnten meine Punkte dann ja ganz aus dem Hänger verschwinden. Eine Befüllung bis oben hin wäre auch nicht möglich. Nochmal zu den Positionssensoren: das muss doch irgendwie funktionieren, oder nicht? Mein Autoschlüssel bekommt es doch auch auf ein paar cm hin, dass er weiß ob er an der Tür vorne links ist, hinten rechts, im Auto, außerhalb des Autos,.... Wenn ich nun vier Sensoren an jede Ecke des Anhängers mache, müssten doch diese relativ zueinander die Position bestimmen können (ggf. mit Gyroskop auch noch die Ausrichtung der "Ebene"). Wenn ich nun noch einen Sensor auf dem Häcksler habe (inkl. Gyroskop), müssten die anderen 4 doch in etwa die Höhendifferenz und die Position bestimmen können und anhand der räumlichen Ausrichtung die Gerade erzeugen..
Ich würd ´ne Drohne drüberfliegen lassen. Kleine Positionslämpchen an den Hänger und den Rüssel, dann geht´s auch im Dunkeln. Wär zumindest eine zeitgemäße Lösung … Edit: Sehe gerade, wurde schon erwähnt.
GPS. Zwei an den Hänger (an gegenüberliegenden Ecken), einen an den Rüssel. Wahrscheinlich reicht RTK. Kostet Geld, gibt aber die Daten, die du brauchst. Der Rüssel kriegt noch einen Neigungssensor und einen Geber für die Ausrichtung. Ansonsten natürlich die klassische Lösung über Kameras. Sinnvollerweise eine Ultra-Weitwinkel-Kamera am Rüssel, die am Hänger angebrachte Marker erfasst und so ihre Position erkennt. Nach Bedarf noch Kameras am Hänger, die den Rüssel beobachten oder eine Kamera am Rüssel, die einen kleineren Bildausschnitt beobachtet, aber sicherstellen kann, dass der Materialstrahl innerhalb des Hängers bleibt. Wahnsinnig komplexe Lösungen mit vielen Baugruppen würde ich aufgrund des Einsatzgebiets nicht empfehlen, da ist es geschickt, wenn alles in möglichst wenigen robusten Gehäusen stattfindet. Mit GPS und/oder Bildverarbeitung ist die Komplexität in der Software, die Hardware kann man relativ schnell und einfach direkt so kaufen, auch robust genug für die vorhergesehenen Einsatzzwecke.
F. schrieb: > Wahrscheinlich reicht RTK. Was meinst du mit der Bemerkung? RTK dürfte auf eine Positionsgenauigkeit von größenordnungsmäßig 1cm kommen. Die Richtung des Häckselgutes aus S5 und S6 zu bestimmen, wird allerdings eher ungenau, weil die Sensoren arg dicht beieinander liegen. Da wird es wohl günstiger sein, mit einem Beschleunigungssensor und evtl. Kompass nachzuhelfen. Peter G. schrieb: > Skizze.png
Realsense D455 und mit einem PI/Jetson auswerten. Sollte keine Hexerei sein, sofern der Realsense nicht zu schnell verschmutzt.
Angehängte Dateien:
-

feldha_cksler_kamera.png
220 KB
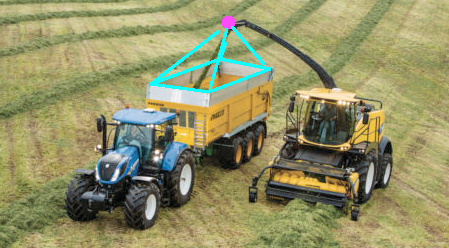
Ich würde einen Ansatz mit Bildauswertung bevorzugen. Ich würde Versuche mit einer Kamera oben am Auswurfrohr beginnen. Zumindest in der Versuchsphase könnte man die obere Kante des Hängers mit auffällig buntem oder schwarzem Klebeband o.ä. einfärben, irgendwas, was sich deutlich von der Umgebung unterscheidet ... oder wenigstens Marker auf den Ecken. Um den Strahl des Häckselgutes vom bereits "ruhenden" Material zu unterscheiden, könnte man mal die Bildschärfe bzw. den daraus resultierende lokalen Kontrast untersuchen (Bewegungs-Unschärfe). Allerdings hat dafür die Kamera am Auswurfrohr einen ungünstigen Winkel. Hier evtl. an zwei Kameras an einem waagerechten Ausleger mit z.B. einer Länge von 50cm denken ... So ein komplexes Problem löst man nicht von Vorne herein in einem Schritt, sondern abschnittweise. Auch die Erkenntnis, dass etwas nicht funktioniert, ist schließlich eine Erkenntnis. Theoretische Vorarbeit ist unverzichtbar, den endgültigen Beweis erbringt nur ein Versuch. Gegen Staub auf Kameralinsen gibts genügend Rezepte, wie Gebläse, elektrostatische Verfahren, rotierende Glasscheiben bis hin zum Mini-Scheibenwischer ... das würde ich - zumindest nicht am Anfang - zum Hauptproblem machen.
Frank E. schrieb: > Ich würde Versuche mit einer Kamera oben am Auswurfrohr beginnen. > Zumindest in der Versuchsphase könnte man die obere Kante des Hängers > mit auffällig buntem oder schwarzem Klebeband o.ä. einfärben, irgendwas, > was sich deutlich von der Umgebung unterscheidet ... oder wenigstens > Marker auf den Ecken. Nintendo WIImote lässt grüßen. (modulierte oder ferngesteuerte) IR-Sender an den Ecken, deren Abstände zueinander bekannt sind. Oder Marker, die z.B. pink oder in einer anderen nicht unbedingt in der Natur vorkommenden Farbe angemalt sind.
Danke schon einmal euch allen für die vielen Ideen. Ich werde jede auf jeden Fall mal als Konzept aufnehmen und theoretisch betrachten und bewerten. Generell bin ich aktuell aber eher bei Konzepten ohne optische Module (Laser, Kamera,...). Ich finde gerade die Lösung mit Kamera auch sehr charmant (wäre dann ja auch möglich, das Auswurfrohr automatisch beim Befüllen zu steuern, gibt es ja teilweise schon so oder so ähnlich). Das Problem bei der Kameralösung sehe ich aktuell eher in der Dunkelheit. Da wird das ganze vermutlich schwierig.
Peter G. schrieb: > Das Problem bei der Kameralösung sehe ich aktuell eher in der > Dunkelheit. Da wird das ganze vermutlich schwierig. Dafür genügen wenige IR-LEDs, die machen die Szene für die Kamera taghell. Als Markierung dann 3M-Reflektorband ... Ich würde übrigens streng darauf achten, dass sich alle aktiven Komponenten möglichst auf einer Seite der Szene (Hänger oder Häcksler) befinden, u.a. wegen der Stromversorgung, notwendiger Kommunikation, Kabel usw.
Wenn eine Auflösung von 10cm reichen würde werfe ich mal Bluetooth Channel Sounding in den Raum.
> Hierzu fehlt mir jedoch jeglicher Ansatzpunkt.
Renesas macht sowas. Die haben gestern dazu auf ihrer Hausmesse
eine beeindruckende Demo gezeigt. Die mache das mit einer Erweiterung
von Bluetooth. Sah sehr einfach und zuverlaessig aus.
Vanye
Vanye R. schrieb: >> Hierzu fehlt mir jedoch jeglicher Ansatzpunkt. Das schrieb wer? Sooh kompliziert ist die Zitatfunktion doch nun wirklich nicht zu bedienen :-(
Vanye R. schrieb: > Renesas macht sowas. Die haben gestern dazu auf ihrer Hausmesse > eine beeindruckende Demo gezeigt. Die mache das mit einer Erweiterung > von Bluetooth. Sah sehr einfach und zuverlaessig aus. > > Vanye Hast du hierzu zufällig irgendeinen Link? Konnte nirgends etwas finden. -- Danke für eure Ideen. Ich würde mit diesen Konzepten dann mal starten, denke das waren jetzt auch die Kernideen aus den ganzen Beiträgen - Kamera (z. B. Realsense D455, gibts da noch etwas kostengünsigeres??) - Positionssensoren (GPS RTK, Bluetooth Channel Sounding, Decawave DWM1000, ...) - Ultraschallsensor Alles in Richtung Laser o. Ä. habe ich für mich nach längerer Überlegung doch ausgeschlossen.
Beitrag #7891039 wurde von einem Moderator gelöscht.
Stephan R. schrieb im Beitrag #7891039:
> Welches Arschloch drückt eigentlich die ganzen Pfeile-nach-unten ?
Beklag Dich nicht. Das ist (sind) irgendein armes Schwein, dem es viel
schlechter geht als Dir! Hier ist endlich ein Machttrip möglich und er
kann anonym seinen ganzen angestauten Frust ablassen: "Daaaaaaa minus
eins! Hab' ich es Dir gegeben!!!11elf"
Für den Forenbetreiber wäre es sicherlich ein leichtes herauszufinden,
wer das macht. Dann könnte er, um den Benutzer zu unterstützen, seine
ganzen Bewertungen löschen, damit er nochmal die selben Beiträge negativ
bewerten kann…
Gruß
Jobst
[OT] Jobst M. schrieb: > anonym Da man sich hier inzwischen anmelden muss, ist hier niemand mehr "anonym" unterwegs. [/OT]
Rahul D. schrieb: > Da man sich hier inzwischen anmelden muss, ist hier niemand mehr > "anonym" unterwegs. Du kannst sehen, wer die Bewertungen abgibt? Ich jedenfalls nicht, daher ist es anonym! Gruß Jobst
Ich würde mir wie oben schon erwähnt den DWM1000/DWM3000 bzw. allgemein TDoA & two-way ranging anschauen. Das sind sehr beliebte Methoden für real time location systems und mit den Modulen schnell umgesetz. Oder wenns nicht UWB sein sollen BLE Location Tracking.
Jobst M. schrieb: > Du kannst sehen, wer die Bewertungen abgibt? > Ich jedenfalls nicht, daher ist es anonym! Warum sollte mich das interessieren? Selbst hinter den Benutzernamen ist man doch anonym.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.