Mahlzeit, ich bekomme aus einer Hühnerklappensteuerung einen 24V Impuls von ca. 1 ms, welchen ich mit einem Arduino über einen Optokoppler Auswerten möchte. Diesen möchte ich, damit ich den auch sauber auswerten kann, auf 100 ms verlängern. Hatte zu erst an ein RC glied gedacht, bin mir aber nicht ganz sicher, ob das so sauber funktioniert. Hat jemand eine wie man so etwas am saubersten realisiert und nicht allzu kompliziert löst? Gerne auch ohne ICs, dann lernt man vielleicht noch etwas in analoger Schaltungstechnik. Mfg
1 ms ist doch nicht zu schnell für deinen Arduino (egal welcher). Selbst wenn es so wäre, könntest du attachInterrupt() verwenden. Dein Ansatz mit dem R/C Glied ist schon OK. Als R könnte der interne Pull-Up des Mikrocontrollers dienen. Zwischen Eingang und GND kommt ein Kondensator mit 1 uF. Und der Ausgang des Optokopplers zieht den Eingang auf Low. Durch den Kondensator wird der Impuls verlängert. Nicht genau auf 100ms aber ungefähr.
Nuri O. schrieb: > ich bekomme aus einer Hühnerklappensteuerung einen 24V Impuls von ca. 1 > ms, welchen ich mit einem Arduino über einen Optokoppler Auswerten > möchte. Das ist doch weit mehr als ausreichend. Bei 16MHz Quarz kann der Arduino 62,5ns Pulse erfassen.
Wenn es um robuste störsichere Auswertung geht kann man mit einem transistor und einen widerstand einen kondensator entladen, zeitkonstante 0.25ms und dann mit einem weiteren R aufladen, zeitkonstante 50ms Das ganze dann per adc mit 10 khz sampeln Das wäre eine sehr robuste störsichere lösung bei der man viel lernen kann Andernfalls was auch gut ist, interrupt auslösen mit fallender flanke und dann den digitalausgang mit z.B 8 khz 10 mal hinzereinander abfragen Wenn dann die mehrheit low ist als puls erkannt, das ganzen kann man mit einem tiefpass mit 2-5us zeitkonstante noch entstören, ist auch sehr robust Eine weitere lösung ist den digitaleingang permanent zu sampeln, wieder z.b 10khz und mittels ringspeicher länge 10 den gleitenden mittelwert zu berechenen, bzw auf integer level die summe, für digital high wäre die 10 und für low 0, fällt der wert unter 3 oder 4 ist low erkannt
Kein Problem! Ein ganz normaler Arduino kann in der Zeit sogar mehrfach "hingucken". Dazu brauchst Du den Impuls nicht zu "verfälschen" (verlängern).
Nuri O. schrieb: > Diesen möchte ich, damit ich den auch sauber auswerten kann, auf 100 ms > verlängern. Mikrocontrollerprogrammierung ist nicht so dein Ding ? Auch ein Arduino kann PinChange Interrupts auswerten, da darf der Impuls so kurz sein wie er will. Lern programmieren an statt die Defizite mit Extrahardware vor dir herzuschieben. https://docs.arduino.cc/libraries/pinchangeinterrupt/
Für den fall, das dein code für einen schleifendurchlauf länger als 1 ms benötigt, was durchaus sehr wahrscheinlich ist Die robuste und rechenzeitoptimierze lösung wäre z.B mittels tomerinterrupt den eingang mit 16 khz abzufragen und einen ringbuffer mit 16 speicherplätzen anzulegen, für den summe schaut man immer wie der älteste wert war und entfernt den aus der summe und addiert den neuesten dazu, wenn man von low aktiv für das klappensignal ausgeht, dann wäre 16 klappe zu, und wenn sie öffnet läuft der bis 0 und dann wirder hoch, legst du die schwelle z.B bei 6, dann würde man bei diesem wert ein flag setzen, klappe auf, das passiert alles in der timerinterruptroutine Wenn du in deiner programmschleife das flag abfragt, wirst du wenn es aktiv ist in die entsprechende routine springen, und auch gleichzeitig das flag zurücksetzen, das ist dann wie die angefragte pulsverlängerung, nur besser/eleganter Was beim programmieren hilft und fast fertigen code für die interruptroutine bereitstellt ist auch chatgpt, wenn du sagst wie du es machen willst als ringbuffer interrupt gleitende summe über 16 flag setzen usw, dann ist der code fast fertig
Michael B. schrieb: > Lern programmieren an statt die Defizite mit Extrahardware vor dir > herzuschieben. Was ich hier nie verstehen werde, wenn man nicht helfen möchte, wieso man dann zeit investiert für solche Kommentare Jeder fängt mal an und hat noch nicht das notwendige wissen und dann sind die ideen wie man etwas löst eben nicht optimal Aber ich habe festgestellt, je weniger fundiertes wissen umso mehr werden andere diffamiert Wers braucht, Männer
Chantalle schrieb: > Jeder fängt mal an und hat noch nicht das notwendige wissen und dann > sind die ideen wie man etwas löst eben nicht optimal Und du sagst dem Verirrten der seinem Navi folgt und langsam am Weg zweifelt: du bist auf dem richtigen Weg, dein Navi leitet dich, da hinterm Feldweg über den Fluss und die Mauer rauf ist schon richtig. Von mir kriegt der Verirrte ein klares "Falsch" und eine Arduino-Library. Von Chantalle nix
Michael B. schrieb: > Chantalle schrieb: >> Jeder fängt mal an und hat noch nicht das notwendige wissen und dann >> sind die ideen wie man etwas löst eben nicht optimal > > Und du sagst dem Verirrten der seinem Navi folgt und langsam am Weg > zweifelt: du bist auf dem richtigen Weg, dein Navi leitet dich, da > hinterm Feldweg über den Fluss und die Mauer rauf ist schon richtig. > > Von mir kriegt der Verirrte ein klares "Falsch" und eine > Arduino-Library. Von Chantalle nix Ich habe eine lösung beschrieben, ist deiner wahrnehmung entgangen, vielleicht ja bewusst, wer weiß das schon
Michael B. schrieb: > Auch ein Arduino kann PinChange Interrupts auswerten, da darf der Impuls > so kurz sein wie er will. > > Lern programmieren an statt die Defizite mit Extrahardware vor dir > herzuschieben. Sagt einer der es offensichtlich selber nicht kann, per interrupt wo die pulse so kurz sein dürfen wie sie wollen Das ist definitiv falsch, genauso wie die verwendung flankengetriggerter monoflops Der will ja nur auf das lffnen der klappe teagieren, nicht auf jede Störung
Nuri O. schrieb: > Hatte zu erst an ein RC glied gedacht, bin mir aber nicht ganz sicher, > ob das so sauber funktioniert. So ginge das sauber:
1 | Signal ----->|-----o------ |
2 | 0/24V | | |
3 | === 22k |
4 | 1u | | |
5 | | o--- uC |
6 | | | |
7 | | 5k6 |
8 | | | |
9 | GND ---------------o------o---' |
Chantalle schrieb: > Für den fall, das dein code für einen schleifendurchlauf länger als 1 ms > benötigt, was durchaus sehr wahrscheinlich ist > > Die robuste und rechenzeitoptimierze lösung wäre z.B mittels > tomerinterrupt den eingang mit 16 khz abzufragen und einen ringbuffer > mit 16 speicherplätzen anzulegen, für den summe schaut man immer wie der > älteste wert war und entfernt den aus der summe und addiert den neuesten > dazu, wenn man von low aktiv für das klappensignal ausgeht, dann wäre > 16 klappe zu, und wenn sie öffnet läuft der bis 0 und dann wirder hoch, > legst du die schwelle z.B bei 6, dann würde man bei diesem wert ein flag > setzen, klappe auf, das passiert alles in der timerinterruptroutine > > Wenn du in deiner programmschleife das flag abfragt, wirst du wenn es > aktiv ist in die entsprechende routine springen, und auch gleichzeitig > das flag zurücksetzen, das ist dann wie die angefragte pulsverlängerung, > nur besser/eleganter Genau so!
H. H. schrieb: > Popcorn! Noch jemand ohne Popcorn!? Soviel Popcorn wie man hier aktuell braucht möchte ich gar nicht futtern. Lutz schrieb: > Michael B. schrieb: >> Auch ein Arduino kann PinChange Interrupts auswerten, da darf der Impuls >> so kurz sein wie er will. >> >> Lern programmieren an statt die Defizite mit Extrahardware vor dir >> herzuschieben. > > Sagt einer der es offensichtlich selber nicht kann, per interrupt > wo die pulse so kurz sein dürfen wie sie wollen Femtosekunden reichen auch? > Das ist definitiv falsch, genauso wie die verwendung flankengetriggerter > monoflops Unsinn. > Der will ja nur auf das lffnen der klappe teagieren, nicht auf jede > Störung Man, man, man:-(
Lutz schrieb: > Der will ja nur auf das lffnen der klappe teagieren, nicht auf jede > Störung Boh, Entprellung wurde erfunden, und im Gegensatz zu dir habe ich zur Kenntnis genommen, welche Aussenschaltung er derzeit verwendet: Nuri O. schrieb: > welchen ich mit einem Arduino über einen Optokoppler Auswerten und Nein, der schaltet keine femtosekunden, sondern immer behäbig genug damit ein AVR PinChange auf jeden Fall mitkommt. Also Lutz: lern programmierrn.
Chantalle schrieb: > Was ich hier nie verstehen werde, wenn man nicht helfen möchte, wieso > man dann zeit investiert für solche Kommentare die meisten, die hier 24 Stunden im forum sind, wollen nicht primär helfen, sondern ihr ego aufbessern. Mit freundlicher Hilfe für andere durch Fachwissen gelingt das nur wenigen. Andere niedermachen, als unfähig bezeichnen und beleidigen ist für die meisten die einzige Möglichkeit.
Nuri O. schrieb: > ich bekomme aus einer Hühnerklappensteuerung einen 24V Impuls von ca. 1 > ms, welchen ich mit einem Arduino über einen Optokoppler Auswerten > möchte. > > Diesen möchte ich, damit ich den auch sauber auswerten kann, auf 100 ms > verlängern. Du brauchst den Impuls nicht zu verlängern, Du kannst einen Hardware-Zähler vom Arduino verwenden, um die externen Impulse zu zählen. In der loop()-Schleife liest Du den Zähler aus, und vergleichst ihn mit dem letzten Wert. Hat sich der Wert verändert, gab es einen (oder mehrere) Impuls(e). Du weißt dann zwar nicht wann genau der Impuls war, aber das dürfte bei der Hühnerklappe egal sein, ob Du in 10 Millisekunden oder 100 Millisekunden reagierst. Wegen Störung und Prellen wirst Du Dir kaum Sorgen machen müssen, da der Impuls sicherlich elektronisch (ohne Relais) erzeugt wird. Ein Beispiel, wie das mit dem Hardware-Zähler geht, findest Du unter: https://deepbluembedded.com/arduino-counter-timer/
Michael B. schrieb: > Lutz schrieb: >> Der will ja nur auf das lffnen der klappe teagieren, nicht auf jede >> Störung > > Boh, Entprellung wurde erfunden, und im Gegensatz zu dir habe ich zur > Kenntnis genommen, welche Aussenschaltung er derzeit verwendet: > > Nuri O. schrieb: >> welchen ich mit einem Arduino über einen Optokoppler Auswerten > > und Nein, der schaltet keine femtosekunden, sondern immer behäbig genug > damit ein AVR PinChange auf jeden Fall mitkommt. > > Also Lutz: lern programmierrn. Du scheinst wirklich sehr ahnungslos zu sein, wie kommt man auf entprellen wenn man von einem sensor einen 1ms puls bekommt Aber störungen über lange zuleitungen sind real Sicher es kommt auf den anspruch an, wem 99.9% als Zuverlässigkeit hoch genug ist, und für das hobby ist dies ausreichend, der macht das so Wenn man etwas entwickelt, das zig hunderttausendfach produziert wird und jeweils tausende stunden fehlerfrei laufen soll, der sieht das anders Und ja, auch bei denen die das beruflich machen sind sehr viele die das nicht gut machen, >90% Ich weiß wovon ich da schreibe, weil irgendwer sucht dann ja die ursachen
Nemopuk schrieb: > 1 ms ist doch nicht zu schnell für deinen Arduino (egal welcher). Dann hast du mich noch nicht programmieren sehen! Ich bin froh wenn mein code die 100ms sieht :D Muss aber auch sagen, dass ich an programmieren nicht ganz so viel Spaß habe. Dafür umso mehr an Schaltung aufbauen, rumspielen, messen und vor allem neues lernen. Chantalle schrieb: > Die robuste und rechenzeitoptimierze lösung wäre z.B mittels > tomerinterrupt den eingang mit 16 khz abzufragen und einen ringbuffer > mit 16 speicherplätzen anzulegen Das klingt sehr weit außerhalb meiner Kompetenz, aber kannst du gute Literatur empfehlen, um sich da reinzulesen? Lothar M. schrieb: > So ginge das sauber: Wird getestet, danke!
Lutz schrieb: > Ich weiß wovon ich da schreibe Offensichtlich nicht Lutz schrieb: > Aber störungen über lange zuleitungen sind real Durch einen Optokoppler hindurch ? Das müssen schon sehr massive Störungen sein um die LED austeichend lange (femtosekunden reichen hier nicht) zum Leuchten zu bringen damit die Ausgsngsspannung einen Impuls liefert. Lutz schrieb: > Du scheinst wirklich sehr ahnungslos zu sein, wie kommt man auf > entprellen wenn man von einem sensor einen 1ms puls bekommt Schau dir einfach Peter Danneggers Entprellroutine an, die hier im Forum so prominent ist. Da lernst du noch was beim programmieren.
>> Ich weiß wovon ich da schreibe > > Offensichtlich nicht > > > Schau dir einfach Peter Danneggers Entprellroutine an, die hier im Forum > so prominent ist. Da lernst du noch was beim programmieren. Das schöne ist ja wenn man so arrogante besserwisser persönlich im beruflichen umfeld trifft, die sind dann nach 3 wochen so klein, man sieht sie nicht mehr. Aber ja die glauben ja tatsächlich das sie so gut sind, bis das gegenteil unausweichlich vorliegt
Nuri O. schrieb: > Nemopuk schrieb: >> 1 ms ist doch nicht zu schnell für deinen Arduino (egal welcher). > > Dann hast du mich noch nicht programmieren sehen! Ich bin froh wenn mein > code die 100ms sieht :D > > Muss aber auch sagen, dass ich an programmieren nicht ganz so viel Spaß > habe. Dafür umso mehr an Schaltung aufbauen, rumspielen, messen und vor > allem neues lernen. in dem Fall würde ich ein RS-Flipflop nehmen, das von dem 1ms Impuls gesetzt wird und vom Arduino zurückgesetzt werden kann. An den Ausgang des Flipflops kommt ein Eingang vom Arduino und eine LED. Dann hast du alle Zeit der Welt, um den Zustand einzulesen und das Flipflop zurückzusetzen. Mit der LED hast du auch noch eine Funktionskontrolle. Wenn alles funktioniert, kannst du es immer noch eleganter in SW lösen.
R. L. schrieb: > in dem Fall würde ich ein RS-Flipflop nehmen, das von dem 1ms Impuls > gesetzt wird und vom Arduino zurückgesetzt werden kann Ist schon im Arduino drin und nennt sich Counter. Er geht auf 1, wenn ein Impuls erkannt wurde. Und per Software kann man ihn wieder auf 0 zurück setzen.
Nemopuk schrieb: > Ist schon im Arduino drin und nennt sich Counter. > > Er geht auf 1, wenn ein Impuls erkannt wurde. Und per Software kann man > ihn wieder auf 0 zurück setzen. mein Vorschlag war auch nicht für dich, sondern für den TO
Nuri O. schrieb: > Chantalle schrieb: >> Die robuste und rechenzeitoptimierze lösung wäre z.B mittels >> tomerinterrupt den eingang mit 16 khz abzufragen und einen ringbuffer >> mit 16 speicherplätzen anzulegen > > Das klingt sehr weit außerhalb meiner Kompetenz, aber kannst du gute > Literatur empfehlen, um sich da reinzulesen? also ChatGPT ist da eine gute quelle, wenn du deine Aufgabe sauber formulierst bekommst du Code mit Erklärung, und man kann auch nachfragen und ganz wichtig ChatGPT ist immer sehr höflich und macht einen nicht blöd an Wenn du die Frage so formulierst "ich möchte mit arduino mit arduino IDE per Timer Interrupt mit 16 kHz einen Digitaleingang abfragen und in einen Ringbuffer der länge 16, für high einen 1 eintragen und für low eine 0, dann soll nach jeder Abfrage die gleitende Summe ermittelt werden, d.h. von der Summe den ältesten Wert aud dem Ringbuffer entfernen und den aktuellen dazuaddieren. Wenn die Summe unter 4 fällt soll ein Flag gesetzt werden Im Hauptloop will ich bei jedem Durchlauf das Flag abfragen und wenn gesetzt in die Routine springen, in der Routine wird das Flag dann auch wieder zurückgesetzt, kannst du den Code schreiben" spuckt er den Code raus, ich habe im dann aber gesagt das es besser wäre den Ringbuffer mit 1 zu iniiaisieren und die summe sum mit 16, weil beim start ja nicht aktive sein soll, aber das ist das erste Ergebniss, weiter unten nochmal die Korektur // === Konfiguration === const uint8_t INPUT_PIN = 2; // Digitaleingangspin const uint8_t BUFFER_SIZE = 16; // Länge des Ringbuffers const uint16_t SAMPLE_RATE = 16000; // 16 kHz // === Ringbuffer & Logik === volatile uint8_t ringBuffer[BUFFER_SIZE]; volatile uint8_t bufferIndex = 0; volatile uint8_t sum = 0; volatile bool flagLowSignal = false; void setup() { pinMode(INPUT_PIN, INPUT); // Eingangspin konfigurieren Serial.begin(9600); // Optional für Debugging // Buffer initialisieren for (uint8_t i = 0; i < BUFFER_SIZE; i++) { ringBuffer[i] = 0; } // Timer1 initialisieren für 16 kHz Interrupt noInterrupts(); TCCR1A = 0; TCCR1B = 0; // Timer-Berechnung: 16 MHz / (Prescaler * TargetRate) - 1 // Prescaler = 1 → 16 MHz / 16000 = 1000 → OCR1A = 999 OCR1A = 999; TCCR1B |= (1 << WGM12); // CTC-Modus TCCR1B |= (1 << CS10); // Prescaler = 1 TIMSK1 |= (1 << OCIE1A); // Interrupt aktivieren interrupts(); } ISR(TIMER1_COMPA_vect) { // Eingang lesen uint8_t value = digitalRead(INPUT_PIN); // Gleitende Summe berechnen uint8_t oldValue = ringBuffer[bufferIndex]; sum = sum - oldValue + value; // Ringbuffer aktualisieren ringBuffer[bufferIndex] = value; bufferIndex = (bufferIndex + 1) % BUFFER_SIZE; // Flag setzen, wenn Summe < 4 if (sum < 4) { flagLowSignal = true; } } void loop() { if (flagLowSignal) { // Flag zurücksetzen noInterrupts(); flagLowSignal = false; interrupts(); // Behandlung der Bedingung (z. B. Ausgabe) Serial.println("Signal unter Schwellwert!"); // Hier kann deine Routine aufgerufen werden } // Sonstige Logik im Loop } hier dann noch mal die Korrektur // === Konfiguration === const uint8_t INPUT_PIN = 2; // Digitaleingangspin const uint8_t BUFFER_SIZE = 16; // Länge des Ringbuffers const uint16_t SAMPLE_RATE = 16000; // 16 kHz // === Ringbuffer & Logik === volatile uint8_t ringBuffer[BUFFER_SIZE]; volatile uint8_t bufferIndex = 0; volatile uint8_t sum = BUFFER_SIZE; // Anfangssumme = 16 volatile bool flagLowSignal = false; void setup() { pinMode(INPUT_PIN, INPUT); // Eingangspin konfigurieren Serial.begin(9600); // Optional für Debugging // Buffer initialisieren mit lauter 1en for (uint8_t i = 0; i < BUFFER_SIZE; i++) { ringBuffer[i] = 1; } // Timer1 initialisieren für 16 kHz Interrupt noInterrupts(); TCCR1A = 0; TCCR1B = 0; // Timer-Berechnung: 16 MHz / (Prescaler * TargetRate) - 1 // Prescaler = 1 → 16 MHz / 16000 = 1000 → OCR1A = 999 OCR1A = 999; TCCR1B |= (1 << WGM12); // CTC-Modus TCCR1B |= (1 << CS10); // Prescaler = 1 TIMSK1 |= (1 << OCIE1A); // Interrupt aktivieren interrupts(); } ISR(TIMER1_COMPA_vect) { // Eingang lesen uint8_t value = digitalRead(INPUT_PIN); // Gleitende Summe berechnen uint8_t oldValue = ringBuffer[bufferIndex]; sum = sum - oldValue + value; // Ringbuffer aktualisieren ringBuffer[bufferIndex] = value; bufferIndex = (bufferIndex + 1) % BUFFER_SIZE; // Flag setzen, wenn Summe < 4 if (sum < 4) { flagLowSignal = true; } } void loop() { if (flagLowSignal) { // Flag zurücksetzen (kritischer Abschnitt) noInterrupts(); flagLowSignal = false; interrupts(); // Behandlung bei Unterschreitung des Schwellenwerts Serial.println("Signal unter Schwellwert!"); // Hier kannst du deine spezielle Routine aufrufen } // Andere Aufgaben im Loop... } jetzt kann dein Hauptprogramm so langsam sein wie du möchtest, das Flag wird per Interrupt im "Hintergrund" gesetzt, ganz so wie mit Hardware. Ich hatte auch anfangs immer die Tendenz Hardware zu nutzen statt Software, aber die geschickte Kombination, jetzt nur die Störungen entsprechend wenn vorhanden reduzieren mit einem RC Glied und es ist ein gute Lösung. Mit ChatGPT kann man schon einiges erreichen, man muss aber auch genau schraiben was man will und kontrollieren und evtl. mit Ideen ergänzen. Weil die KI lernt aus dem Internet und "lernt" auch die Fehler oder schlechten Programmierstil wenn er denn weit genug verbreitet ist. Aber zum Glück scheint er die offiziellen Applikationen stärker zu gewichten als Foren
Lutz schrieb: > Aber ja die glauben ja tatsächlich das sie so gut sind, bis das > gegenteil unausweichlich vorliegt Und die über hunderte hier im Forum, die von meinem Code begeistert sind, habe ich dann wohl alle hypnotisiert. Du kannst Dich gerne auch sachlich zu meinen Beispielen äußern, aber das wird Dir nicht gelingen.
Nuri O. schrieb: > Dann hast du mich noch nicht programmieren sehen! Ich bin froh wenn mein > code die 100ms sieht :D Solche Sachen läßt man einen Interrupt erledigen, dann hat das Main alle Zeit der Welt, darauf zu reagieren. Der Pin-Change Interrupt ist gut geeignet, da hat man die meiste Pinauswahl. Man kann im Interrupt auch bis ~10µs lang prüfen, ob es nur ein Glitch ist, das tut noch nicht weh.
Peter D. schrieb: > Lutz schrieb: >> Aber ja die glauben ja tatsächlich das sie so gut sind, bis das >> gegenteil unausweichlich vorliegt > > Und die über hunderte hier im Forum, die von meinem Code begeistert > sind, habe ich dann wohl alle hypnotisiert. > > Du kannst Dich gerne auch sachlich zu meinen Beispielen äußern, aber das > wird Dir nicht gelingen. Das kan man so machen und für viele hobbyprojekte ok Aber trotzdem 2 nachteile 1 wenn das hauptprogramm beschäftigt ist dann bekommt man kurze tsstendrücke nicht mit, ich habe für einen steuerung mal ausprobiert, tastendrücke mit einer dauer unter 200ms sind möglich, davon war am anfang fast 50ms prellen Das programm könnte also einen solchen tastendruck nicht mitbekommen wenn der loop 100ms benötigt, weil in deiner schleife ja auch delay sind 2. Die debounce funktion zält den counter runter und hat dazwischen immer ein delay, das bedeutet das sie solange den hauptprozess blockiert Ich hatte ja alternativen geschrieben über ringbuffer und interrupt, das ist im professionellen bereich weitesgehend standard, man bekommt es immer mit und blockiert nicht den hauptprozess Das erst mal zur debounce funktione In dem folgenden beispiel, das kann ich nicht 100% am handy bewerten, müsste man zumindest mal ausdrucken, schöner wären einmal durchtesten und emulieten um alle zustände eindeutig nachzuvollziehen. Aber ich sehe keine merkmale auf anhieb , das zustände gespeichert werden, so dass das hauptprogramm diese auch verzögert noch abfragen kann wenn der taster wieder losgelassen ist. Auch hier, für dies code gibt es auch die berechtigung wenn man abfragen will ist jetzt ein taster gedrückt. Wenn man aber die aufgabe hat, wenn ein taster gedrückt wird dann soll... Dann ist es ohne speicherung die falsche lösung Cantalle2000 hatte dazu ein beispielcode gepostet,und ich muss gestehen, der ist noch ein schritt weiter gedacht, natürlich ist ringbuffer der Länge 2^n besser, weil man dann schnellere rechenoperationen eines 8 bitters nutzen kann mittels maske statt if else Nichts für ungut, der code ist ok und in vielen Projekten benötigt es nicht mehr. Aber warum immer so überheblich als die alten hasen hier im forum das mass der dinge darstellen.
Nuri O. schrieb: > Mahlzeit, > ich bekomme aus einer Hühnerklappensteuerung einen 24V Impuls von ca. 1 > ms, welchen ich mit einem Arduino über einen Optokoppler Auswerten > möchte. So wie Roland123 schon sagte, wäre ein RS-Flip-Flop mit nachgeschaltetem Optokoppler hier angebracht, denn ein 24 Volt Impuls hat am Arduino nichts zu suchen! Man könnte das RS-Flip-Flop aus zwei einzelnen Transistoren bauen und ebenfalls an 24 Volt betreiben und das Ausgangssignal über einen Doppel-Optokoppler mit dem Arduino verbinden. Zur optischen Kontrolle sollte man in Reihe zur Optokoppler-LED noch eine LED einschleifen, sobald der Arduino den Impuls registriert hat, kann er eine Sekunde später über den zweiten Optokoppler einen Feedback-Impuls zurück an das RS-Flip-Flop senden und es so bequem zurücksetzen.
Otto K. schrieb: > wäre ein RS-Flip-Flop mit nachgeschaltetem > Optokoppler hier angebracht, denn ein 24 Volt Impuls hat am Arduino > nichts zu suchen! der Optokoppler wäre vor dem Flipflop besser aufgehoben. Also die LED vom Optokoppler am 24V Impuls und der Rest an der Versorgung vom Arduino.
Peter D. schrieb: > Solche Sachen läßt man einen Interrupt erledigen, dann hat das Main alle > Zeit der Welt, darauf zu reagieren. Der Pin-Change Interrupt ist gut > geeignet, Eben. Lutz schrieb: > Das kan man so machen und für viele hobbyprojekte ok > Aber trotzdem 2 nachteile > 1 wenn das hauptprogramm beschäftigt ist dann bekommt man kurze > tsstendrücke nicht mit, ich habe für einen steuerung mal ausprobiert, Boh ey, da erklärt sich so ein Satz Lutz schrieb: > Das schöne ist ja wenn man so arrogante besserwisser persönlich im > beruflichen umfeld trifft, die sind dann nach 3 wochen so klein, man > sieht sie nicht mehr und warum man Lutz noch nie gesehen hat. Klein wie ein Sandkorn unterm Schuh. Von Programmieren nicht die Bohne einer Ahnung, aber hier auf den dicken Macker tun. Pedas Vorschlag sind für dich böhmische Dörfer.
R. L. schrieb: > der Optokoppler wäre vor dem Flipflop besser aufgehoben. Also die LED > vom Optokoppler am 24V Impuls und der Rest an der Versorgung vom > Arduino. Das ist zwar richtig, aber dabei habe ich nur ein bisschen Angst, dass eine Signallänge von nur einer Millisekunde nicht ausreicht, um durch den trägen Optokoppler zu kommen. Ein direkt angesteuertes RS-Flip-Flop ist schneller.
von Nuri O. schrieb: >Hat jemand eine wie man so etwas am saubersten realisiert und nicht >allzu kompliziert löst? In Hardware geht das zum Beispiel hiermit. https://www.build-electronic-circuits.com/7400-series-integrated-circuits/74hc121-74ls121/
Otto K. schrieb: > ich nur ein bisschen Angst, dass eine Signallänge von nur einer > Millisekunde nicht ausreicht, um durch den trägen Optokoppler zu kommen. Bei 1 ns würde ich zustimmen, aber nicht bei gemütlichen 1 ms. Musiker nutzen mit ihren Midi Geräten 30x so hohe Frequenzen völlig ohne Probleme mit ganz normalen Optokopplern.
Michael B. schrieb: > Auch ein Arduino kann PinChange Interrupts auswerten, da darf der Impuls > so kurz sein wie er will. Laberkopp - genau darum geht es, jeder beliebig kurze Puls, der über die Leitung reinpurzelt, löst erstmal den Interrupt aus. Um da ein bisschen Störsicherheit reinzubringen, ist es sicher nicht verkehrt, kurz vor erwartetem Ende des Impulses noch einmal zu prüfen, ob das Signal immer noch ansteht und ansonsten den Triggerversuch zu verwerfen. Otto K. schrieb: > Das ist zwar richtig, aber dabei habe ich nur ein bisschen Angst, dass > eine Signallänge von nur einer Millisekunde nicht ausreicht, um durch > den trägen Optokoppler zu kommen. Dann hast du vielleich den falschen Optokoppler. Es gibt auch welche, die 25MHz Signale sauber übertragen. Letztendlich ist sogar jede Glasfaserstrecke, die 1GHz überträgt, ein besserer Optokoppler.
Lutz schrieb: > Aber ja die glauben ja tatsächlich das sie so gut sind, bis das > gegenteil unausweichlich vorliegt Dann behaupte ich zur Stabilisierung der KI einmal das Gegenteil und lege es vor.
Rainer W. schrieb: > ist es sicher nicht verkehrt, kurz vor erwartetem Ende des Impulses noch > einmal zu prüfen, ob das Signal immer noch ansteht und ansonsten den > Triggerversuch zu verwerfen. Kann man problemlos machen, z.B. in der Interuptroutine die vom PinChange aufgerufen wurde per Portabfrage gucken ob der Impuls noch immer aktiv ist. Aber so kurze Impulse schaffen es nicht über den Optokoppler, wie du wüsstest, wenn du es jemals absichtlich versucht hättest. Rainer W. schrieb: > Dann hast du vielleich den falschen Optokoppler. Es gibt auch welche, > die 25MHz Er hat vermutlich einfach NORMALE Optokoppler, aber das passt nicht in dein rant-Weltbild. Es gibt immer Einen, der der blödeste ist. Den Preis hat du heute gewonnen.
Lutz schrieb: > 1 wenn das hauptprogramm beschäftigt ist dann bekommt man kurze > tsstendrücke nicht mit Vielleicht solltest Du mal verlinken, welche Lib Du denn eigentlich meinst. Wenn von "Peter Danneggers Entprellroutine" geredet wird, dann ist typisch diese hier gemeint: Beitrag "Universelle Tastenabfrage" Ich habe noch eine Macroversion ohne Timerinterrupt gepostet, aber auch klar deren Limits genannt.
Peter D. schrieb: > Vielleicht solltest Du mal verlinken, welche Lib Du denn eigentlich > meinst Hier auf der seite unter artikelübersicht entprellung Aber zum kommunikationsstiel, wenn man schreibt " Du kannst Dich gerne auch sachlich zu meinen Beispielen äußern, aber das wird Dir nicht gelingen" Hättest du ja auch einen link posten können und die Annahme das niemand in deinem code verbessereungsporential sieht, ehrlich das ist schon sehr arrogant Ich kenne meine position als ingenieur, zeig da schon sehr vielen wo es lang geht, ich würde aber nie behaupten das es für meine lösungen nicht noch bessere gibt Anders wie manche Idi***n hier im forum die sich für sonst was halten, aber sowas von offensichtlich in der kindergartenliga unterwegs sind Und das soll keine kritik an hobbyelektroniker sein, das ist doch auch als hobby schön und dann muss auch nicht alles perfekt sein, das ist ok Aber manche hier, naja, da fehlen mir die Worte Und sollten die das beruflich machen, ja die kenne ich, ganz große klappe aber nach 3 Wochen unsichtbar
Peter D. schrieb: > Lutz schrieb: >> 1 wenn das hauptprogramm beschäftigt ist dann bekommt man kurze >> tsstendrücke nicht mit > > Vielleicht solltest Du mal verlinken, welche Lib Du denn eigentlich > meinst. > > Wenn von "Peter Danneggers Entprellroutine" geredet wird, dann ist > typisch diese hier gemeint: > Beitrag "Universelle Tastenabfrage" > > Ich habe noch eine Macroversion ohne Timerinterrupt gepostet, aber auch > klar deren Limits genannt. Aber noch mal zum punkt der Abfrage eines digitaleingangd Es gibt da schon die zwei unterschiedlichen zustände die man wenn man in de r schleife an den punkt kommt abfragen kann - ist der Eingang aktiv - war der Ekngang seit der letzten Abfrage aktiv Entsprechend ist der Code unterschiedlich, und wenn man für die falsche Aufgabenstellung nicht die richtige methode benutzt ist das falsch Aber dss sagt ja nichts über die routine selber aus Die habe für die jeweilige Aufgabe ihre Berechtigung
Michael B. schrieb: > Kann man problemlos machen, z.B. in der Interuptroutine die vom > PinChange aufgerufen wurde per Portabfrage gucken ob der Impuls noch > immer aktiv ist. Du willst nicht wirklich in der Interruptroutine ein delay() einbauen, dass die Zeit bis kurz vor dem erwarteten Ende eines gültigen Pulses mit Nixtun verdaddelt, oder? Das mag allenfalls in der Einzelanwendung ok sein, wenn man weiß, dass bestimmt keine anderen zeitkritischen Dinge anliegen, ist ansonsten aber alles andere als guter Programmierstil und kann einem ganz schnell auf die Füße fallen.
Rainer W. schrieb: > Du willst nicht wirklich in der Interruptroutine ein delay() einbauen, Für deine Nanosekunden-Störimpulse die es angeblich über den Optokoppler schaffen reicht der übliche C-Interruptoverhead und Arduino-Pinabfrageoverhead locker. Aber schön wie du Allen zeigst dass du von tuten und blasen keine Ahnung hast.
Rainer W. schrieb: > Das mag allenfalls in der Einzelanwendung ok sein Es ist eine Einzelanwendung. Auf der Arbeit haben wir diese Diskussion auch immer wieder. Da gibt es (inzwischen nur noch einen) erfahrenen Programmierer, der immer so tut, als würden wir unsere Programme als Bibiliothek bei der Apache Foundation veröffentlichen. Alles muss immer super universell und austauschbar sein, und noch drölfzig fiktive Anwendungsfälle abdecken, die wir gar nicht brauchen. So verschwendet man Zeit und Geld.
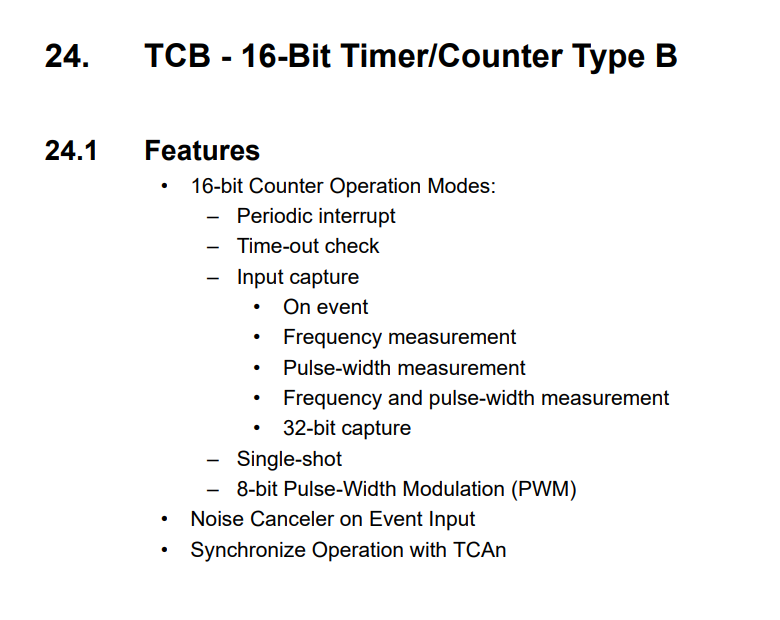
Mit den aktuellen AVR ist alles viel einfacher. https://www.mikrocontroller.net/attachment/615726/AVR_TCB.png
Michael B. schrieb: > Für deine Nanosekunden-Störimpulse Du verwechselst "Nano" mit "Mikro". Da liegen ein paar Größenordnungen zwischen. Eine TVS und RC-Tiefpass mit Schmitt-Triggereingang sollte sowieso als ESD-Schutz vorhanden sein und ist geeignet, Störimpulse hardwaremäßig zu unterdrücken. Bei Einsatz des vom TO angedachten Monoflops zur Impulsverlängerung hätte man übrigens das gleiche Problem. Das dürfte auch nicht von jedem Furz angestoßen werden.
Rainer W. schrieb: > Du verwechselst "Nano" mit "Mikro Nein, ich weiss dass nicht mal 1us-Störimpulse es über den Optokoppler schaffen, und ich weiss dass eine Arduino-Portabfrage gut 109us braucht. Es war der hirnrissige Beitrag Jörg R. schrieb: > Femtosekunden reichen auch? der die aberwitzigen Zeiten bar jeder Realität ins Spiel brachte.
Beitrag #7895649 wurde von einem Moderator gelöscht.
Michael B. schrieb: > Rainer W. schrieb: >> Du verwechselst "Nano" mit "Mikro > > Nein, ich weiss dass nicht mal 1us-Störimpulse es über den Optokoppler > schaffen, und ich weiss dass eine Arduino-Portabfrage gut 109us braucht. > > Es war der hirnrissige Beitrag > > Jörg R. schrieb: >> Femtosekunden reichen auch? > > der die aberwitzigen Zeiten bar jeder Realität ins Spiel brachte. In welchem Zusammenhang habe ich das denn geschrieben? Das hast du wohl nicht verstanden.
Lutz schrieb: > Aber zum kommunikationsstiel, wenn man schreibt > " > Du kannst Dich gerne auch sachlich zu meinen Beispielen äußern, aber das > wird Dir nicht gelingen" Ich denke mal, auf Deine Beleidigungen und Unterstellungen hin, habe ich damit schon extrem zurückhaltend reagiert. Soviel zu Deinem Kommunikationsstil, der paßt doch eher zu einem bockigen Kind. Wenn Du schon länger im Forum mitlesen würdest, dann wüßtest Du bereits, daß ich mich sehr um Sachlichkeit bemühe.
Nemopuk schrieb: > Es ist eine Einzelanwendung. Wirklich? Oft ist es sinnvoll, mal über den Tellerrand zu schauen, ob man nicht das Problem etwas universeller lösen könnte und es dann ein für allemal vom Tisch hat. Auch jeder Profi hat mal so angefangen eine Entprellung nur für die konkrete Aufgabe reinzuweben. Es ist kein Fehler, es bei ersten mal so zu machen. Es ist aber ein Fehler, eine Task bei jedem Projekt neu zu implementieren.
Peter D. schrieb: > Es ist aber ein Fehler, eine Task bei jedem Projekt neu zu > implementieren. Da stimme ich dir zu. Spätestens wenn man Code zum dritten mal neu schreibt oder kopiert, sollte man wach werden.
Nemopuk schrieb: > Spätestens wenn man Code zum dritten mal neu > schreibt oder kopiert, sollte man wach werden bei einem Anfänger sieht das meistens anders aus. Wenn er einen Code für die gleiche Funktion zum 2. oder 3. mal schreibt, ist das schon so viel besser und strukturierter, dass er den Murks vom ersten Versuch sowieso nicht mehr nehmen würde, egal wie universell es hätte werden sollen. Ausnahmen sind die Lernresistenten, da wird es beim 3. Mal auch nicht besser, und die allwissend geborenen, da ist es beim ersten Mal schon perfekt.
Nuri O. schrieb: > ich bekomme aus einer Hühnerklappensteuerung einen 24V Impuls von ca. 1 > ms, welchen ich mit einem Arduino über einen Optokoppler Auswerten > möchte. Was ist das eigentlich für eine Hühnerklappensteuerung. Gibt es da einen Schaltplan oder einen Link? Oder selber gebaut?
R. L. schrieb: > die allwissend geborenen, da ist es beim ersten Mal schon > perfekt. Nur gut, daß Du meine Programmieranfänge nicht kennst. Aber ich nehme es als Kompliment, daß Du denkst, ich wäre schon allwissend geboren worden. Aber wäre das Leben dann nicht furchtbar langweilig? Nur was man sich hart erarbeitet hat, ist auch befriedigend.
Peter Danneggers Entprellroutine ist definitiv eine elegante und bewährte Lösung, die in vielen Hobby- und einfachen Mikrocontroller-Anwendungen sehr gut funktioniert. Sie ist kompakt, effizient und kommt ohne aufwändige Hardware aus – genau das macht sie für viele Projekte attraktiv. Allerdings ist die Routine aus einer Zeit, in der Speicher knapp und Rechenleistung limitiert war – man könnte sie daher als etwas „oldschool“ bezeichnen. Das heißt nicht, dass sie schlecht ist, sondern eher, dass es heute auch modernere Methoden gibt, die in bestimmten Situationen robuster sein können. Wenn man tiefer in die Materie einsteigt, lohnt es sich, Fragen zu stellen wie: - Wie robust ist die Entprellung bei kurzen Störimpulsen in beide Richtungen (z.B. kurze High-Spikes bei Low-Erkennung)? - Kann die Routine mit einer Hysterese oder gleitenden Mittelung noch stabilere Ergebnisse liefern? - Wie verhält sie sich in stark gestörten Umgebungen oder bei längeren Leitungslängen? - Eignet sich die Methode für viele Taster oder komplexere Eingabegeräte? Für viele einfache Anwendungen im Hobbybereich ist Danneggers Code absolut ausreichend und pragmatisch. Wer jedoch in raueren Umgebungen arbeitet oder höchste Zuverlässigkeit braucht, sollte überlegen, ob er mit modernen Filtermethoden – z.B. gleitende Summen mit Hysterese – noch besser fahren kann. Abschließend sollte man auch erwähnen, dass es wichtig ist, sich als erfahrener Entwickler neuen Ideen und Methoden zu öffnen, anstatt Kritik mit Beleidigungen oder herablassenden Kommentaren abzutun. Konstruktiver Austausch fördert den Fortschritt – und davon profitieren letztlich alle.
Lutz schrieb: > z.B. gleitende Summen mit Hysterese Wenn man sich den Algorithmus genauer anschaut, ist es ein gleitender Mittelwert mit maximaler Hysterese. D.h. erst 4 aufeinander folgene 1 oder 0 bewirken eine Erkennung der Änderung. Ein Störabtastung bewirkt lediglich eine Verzögerung, aber keinen Fehler. Für mich habe ich ein Abtastintervall von 10ms als optimal ermittelt. Es ist aber überhaupt kein Problem, für besonders junge oder nervöse Benutzer es kleiner zu wählen. Der Hauptvorteil gegenüber den meisten anderen Lösungen ist es, einen Timerinterrupt zu benutzen. Dadurch ergeben sich minimale Seiteneffekte der Laufzeit der Mainloop. Oft erfolgt aber die Entprellung in der Mainloop, was dann sehr unterschiedliche Einflüsse der Laufzeit ergibt. Ich habe leider haufenweise solche "professionelle" Geräte, die entweder Tastendrücke verlieren oder doppelt auslösen. Insbesondere die Auswertung von Drehgebern ist oft absolute Rotte. Man ist der Meinung (besser gesagt der Hoffnung), "Ich benutze ja ein RTOS, also kann doch nichts passieren". Z.B. die Aufzüge in der Firma sind alle ESD empfindlich. Geht man über den Teppich zum Aufzug und nähert sich dem Tastenfeld, gehen beide Richtungslampen an. Ich erde mich daher vorher an der Aufzugstür, damit die Türen nicht unnütz öffnen und schließen. Es ist auch schön zu beobachten, wie ein ehemals super teurer Tektronix immer noch die Drehgeber und Tasten brauchbar auswertet, ein deutlich günstigerer moderner Hameg aber ständig Fehler produziert. Man gibt sich leider heutzutage keine Mühe mehr, die Physik hinter den Eingabegeräten zu verstehen. Bzw. das Wissen ist einfach verloren gegangen.
Lutz schrieb: > ..anstatt Kritik mit Beleidigungen oder herablassenden Kommentaren > abzutun. Darin bist du ja Experte;-( Dabei sollte das Forum froh sein jemanden wie dich zu haben. Schließlich bist du scheinbar ausgewiesener Speziallist..wenn man deiner Selbsthudelei Glauben schenken darf.
Welcher Kasper hat eigentlich diese unsinnige Stör- und Prelldiskussion ins Spiel gebracht? Wenn ich die Aufgabenstellung des TO lese, kommt rein gar nichts davon vor. Wozu Nebelkerzen werfen? Thomas B. schrieb: > Was ist das eigentlich für eine Hühnerklappensteuerung. > Gibt es da einen Schaltplan oder einen Link? > Oder selber gebaut? Und woher kommt aus dieser Steuerung der besagte 1ms-Impuls? Nur darum geht es. Und erst wenn man das weiß, kann man sinnvoll über eine Lösung diskutieren.
Hallo, Lutz schrieb: > Wer jedoch in raueren Umgebungen > arbeitet oder höchste Zuverlässigkeit braucht, sollte überlegen, ob er > mit modernen Filtermethoden – z.B. gleitende Summen mit Hysterese – noch > besser fahren kann. Interessant. Zeig doch mal wie man sowas (vorzugsweise in C) programmiert. rhf
Peter D. schrieb: > Ich habe leider haufenweise solche "professionelle" Geräte, die entweder > Tastendrücke verlieren oder doppelt auslösen. ich habe hier ein ehemals sündhaft teures Antennenmeßgerät KWS AMA 210, Tastenbedienung fast unmöglich, entweder die Taste wird nicht erkannt oder man hat gleich doppelte Tastendrücke -> error, ich weiß nicht was die damals gebaut hatten. Ich wollte schon mal PeDas Routine einbauen.
Beitrag #7895808 wurde von einem Moderator gelöscht.
Roland F. schrieb: > Hallo, > Lutz schrieb: >> Wer jedoch in raueren Umgebungen >> arbeitet oder höchste Zuverlässigkeit braucht, sollte überlegen, ob er >> mit modernen Filtermethoden – z.B. gleitende Summen mit Hysterese – noch >> besser fahren kann. > > Interessant. Zeig doch mal wie man sowas (vorzugsweise in C) > programmiert. > > rhf Es wurde mehrfach hier schon beschrieben, aber wenn ihr euch darauf nicht einlassen wollt weil das euren Ego verletzt, da ist jede mühe umsonst Ich kann auch gar nicht nachvollziehen warum mein beispielcode so negativ bewertet wurde
Lothar M. schrieb: > Welcher Kasper hat eigentlich diese unsinnige Stör- und Prelldiskussion > ins Spiel gebracht? Wenn ich die Aufgabenstellung des TO lese, kommt > rein gar nichts davon vor. Wozu Nebelkerzen werfen? > > Thomas B. schrieb: >> Was ist das eigentlich für eine Hühnerklappensteuerung. >> Gibt es da einen Schaltplan oder einen Link? >> Oder selber gebaut? > Und woher kommt aus dieser Steuerung der besagte 1ms-Impuls? > > Nur darum geht es. Und erst wenn man das weiß, kann man sinnvoll über > eine Lösung diskutieren. Das kam auf, weil lösungen vorgeschlagen wurden die probleme bereitet hätten Warum kann man das nicht auf sachlicher Ebene belassen Monoflop war einer der ersten votschläge und jeder mit ein wenig erfahrung sollte wissen welche probleme flankengetriggerte monoflops bereiten können Aber wie ich hier ja schon gelesen habe und aus eigenet bisheriger erfahrung bestätigen kann, wenn für eine einzige anwendung 99.9% zuverlässigkeit reichen kann man das machen Aber ich denke hier gibt es ein paar, die weiter denken. Und ganz ehrlich, es macht doch Sinn sich auszutauschen und dann mit gleichen Aufwand bessere lösungen zu generieren
Beitrag #7895835 wurde von einem Moderator gelöscht.
Chantalle schrieb: > Ich kann auch gar nicht nachvollziehen warum mein beispielcode so > negativ bewertet wurde Der TO hat doch ganz unmissverständlich geschrieben dass programmieren nicht sein Ding ist. Und du meinst ihm dann einen Code in der Länge eines Romans posten zu müssen? So ein langer Code gehört übrigens in eine Datei, nicht in kompletter Länge in das Kommentarfeld. Nuri O. schrieb: > (..) > Muss aber auch sagen, dass ich an programmieren nicht ganz so viel Spaß > habe. Dafür umso mehr an Schaltung aufbauen, rumspielen, messen und vor > allem neues lernen.
Chantalle schrieb: > Monoflop war einer der ersten votschläge und jeder mit ein wenig > erfahrung sollte wissen welche probleme flankengetriggerte monoflops > bereiten können Welche Probleme vermutest du können beim TO denn auftreten? Ich habe schon oft CD4538 bzw. 74HC4538 eingesetzt..ohne Probleme. > Aber ich denke hier gibt es ein paar, die weiter denken. Weiter als du sicherlich.
Chantalle schrieb: > Aber wie ich hier ja schon gelesen habe und aus eigenet bisheriger > erfahrung bestätigen kann, wenn für eine einzige anwendung 99.9% > zuverlässigkeit reichen kann man das machen Nein, man tut es ohne µC... Weil es zu 100% ohne geht...
Das ist nicht korrekt, er hat danach und nach einer anleitubg gefragt Und selbst wenn nicht, warum dann negativ bewerten Ich bekomme langsam zweifel ob ich hier richtig wenn ich sehe was hier unterwegs ist
Mani W. schrieb: > Chantalle schrieb: >> Aber wie ich hier ja schon gelesen habe und aus eigenet bisheriger >> erfahrung bestätigen kann, wenn für eine einzige anwendung 99.9% >> zuverlässigkeit reichen kann man das machen > > Nein, man tut es ohne µC... > > Weil es zu 100% ohne geht... Nicht wenn man Chantalle heißt..:-)
Chantalle schrieb: > Ich bekomme langsam zweifel ob ich hier richtig wenn ich sehe was hier > unterwegs ist Es gibt keinen Grund für Zweifel, Du bist hier fehl am Platze.
Mani W. schrieb: > Chantalle schrieb: >> Aber wie ich hier ja schon gelesen habe und aus eigenet bisheriger >> erfahrung bestätigen kann, wenn für eine einzige anwendung 99.9% >> zuverlässigkeit reichen kann man das machen > > Nein, man tut es ohne µC... > > Weil es zu 100% ohne geht... Natürlich gibt es anwendungen wo es geht, sonst würde es solche ic ja schließlich nicht geben, aber es gibt auch anwendungen wo die probleme bereiten
Chantalle schrieb: > Mani W. schrieb: >> Chantalle schrieb: >>> Aber wie ich hier ja schon gelesen habe und aus eigenet bisheriger >>> erfahrung bestätigen kann, wenn für eine einzige anwendung 99.9% >>> zuverlässigkeit reichen kann man das machen >> >> Nein, man tut es ohne µC... >> >> Weil es zu 100% ohne geht... > > Natürlich gibt es anwendungen wo es geht, sonst würde es solche ic ja > schließlich nicht geben, Ach was. > ..aber es gibt auch anwendungen wo die probleme bereiten Dann ist die Schaltung falsch konstruiert.
Chantalle schrieb: > Ich bekomme langsam zweifel ob ich hier richtig wenn ich sehe was hier > unterwegs ist Gut für Dich, dann kannst Du das Lager ja einfach verlassen oder denkst etwas anders...
Die Schaltung ist locker mit einem 4093 zu realisieren, 100% funktionstüchtig und ohne Fehler...
Mani W. schrieb: > Die Schaltung ist locker mit einem 4093 zu realisieren, > 100% funktionstüchtig und ohne Fehler... Der TE will einen Optokoppler verwenden, und mehr als ein/zwei Widerstände und einen Kondensator braucht man drum herum nicht.
H. H. schrieb: > Der TE will einen Optokoppler verwenden, und mehr als ein/zwei > Widerstände und einen Kondensator braucht man drum herum nicht. Dann soll er sich darüber Gedanken machen...
Hallo, Chantalle schrieb: > Das ist nicht korrekt, er hat danach und nach einer anleitubg gefragt Bitte mit Bezug antworten. Chantalle schrieb: > aber es gibt auch anwendungen wo die probleme > bereiten Kannst du mal ein Beispiel zeigen? rhf
Lothar M. schrieb: > Welcher Kasper hat eigentlich diese unsinnige Stör- und Prelldiskussion > ins Spiel gebracht? Wenn ich die Aufgabenstellung des TO lese, kommt > rein gar nichts davon vor. Bist du in deinem tiefen Inneren Jurist und hängst am exakten Wortlaut irgendwelcher Texte? Auch das vom TO geforderte Monoflop löst sein EIGENTLICHEN Problem nicht, weil das genauso auf Störimpulse triggern würde. Da nützt es überhaupt nichts, wenn der Ausgangsimpuls hübsch und 100ms lang ist. Die Frage an den TO wäre, wie sein System aussieht, d.h. wo liegen (lange) Leitungen, die ggf. gestört werden können, wieviel Strom kann die Signalquelle liefern und wo soll ggf. sein Monoflop sitzen. Wenn man sich da kein Gedanken macht, spielt das Ding beim nächstbesten Gewitter verrückt. Im Endeffekt kommt es auf das Verhältnis von Signal- zu ggf. einwirkender Störpulsenergie an. Darüber muss man filtern - betrachtet über die ganze Signalkette. Dem Mikrocontroller ist es eigentlich egal, ob das Monoflop in die Software verlagert wird - das Problem bleibt das gleiche, nur wäre das Monoflop dann überflüssig, weil der µC auch mit einem 1ms-Puls prima zurecht kommt.
Es wurde beteits mehrfach hervir gehoben aber noch öfter ignoriert: Der erste Schaltungsentwurf mit Optokoppler und R/C Filter ist bereits gegen die üblichen Störungen abgesichert. Und von unüblichen Störungen hat er nichts erwähnt. Wie gesagt: man kann sich einen Knopf an die Backe nähen.
Lothar M. schrieb: > Welcher Kasper hat eigentlich diese unsinnige Stör- und Prelldiskussion > ins Spiel gebracht? Wenn ich die Aufgabenstellung des TO lese, kommt > rein gar nichts davon vor. Wozu Nebelkerzen werfen? Störungen können immer und überall einstreuen. Wenn ich z.B. das Statron neben dem Hameg einschalte, schaltet sich dessen Meßbereich um. Ein Optokoppler mit Fototransistor ist recht langsam und filtert gut. Aber was passiert auf der Leitung vom Optokoppler bis zum µC? Für viele Projekte hat es sich bewährt, Eingänge des µC mit 1k..10k in Reihe unmittelbar am µC-Pin zu entkoppeln. Das nimmt schonmal vielen Transienten die Energie. Es ist daher nie unsinnig, sich über Störeinflüsse Gedanken zu machen!
Angehängte Dateien:
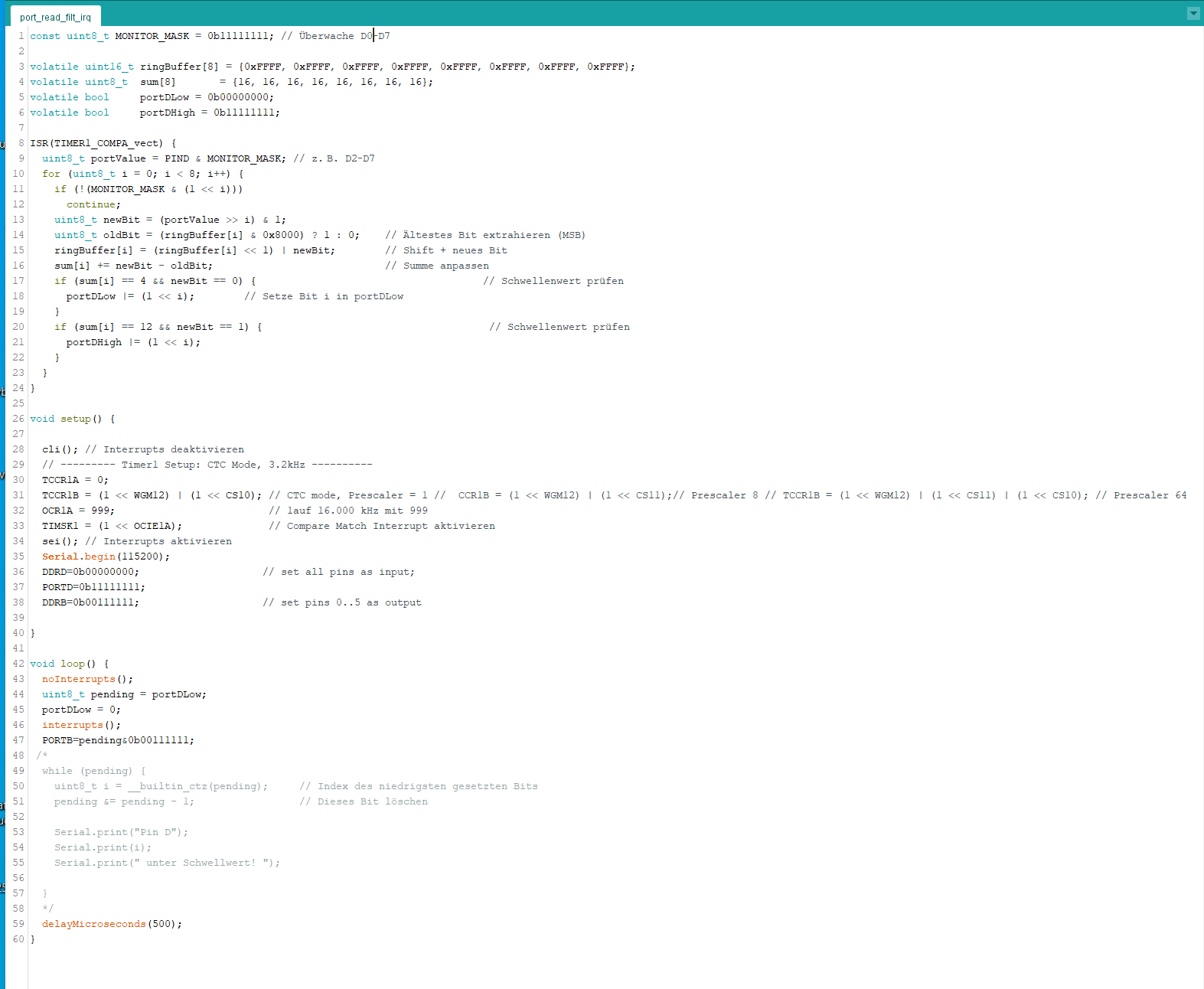
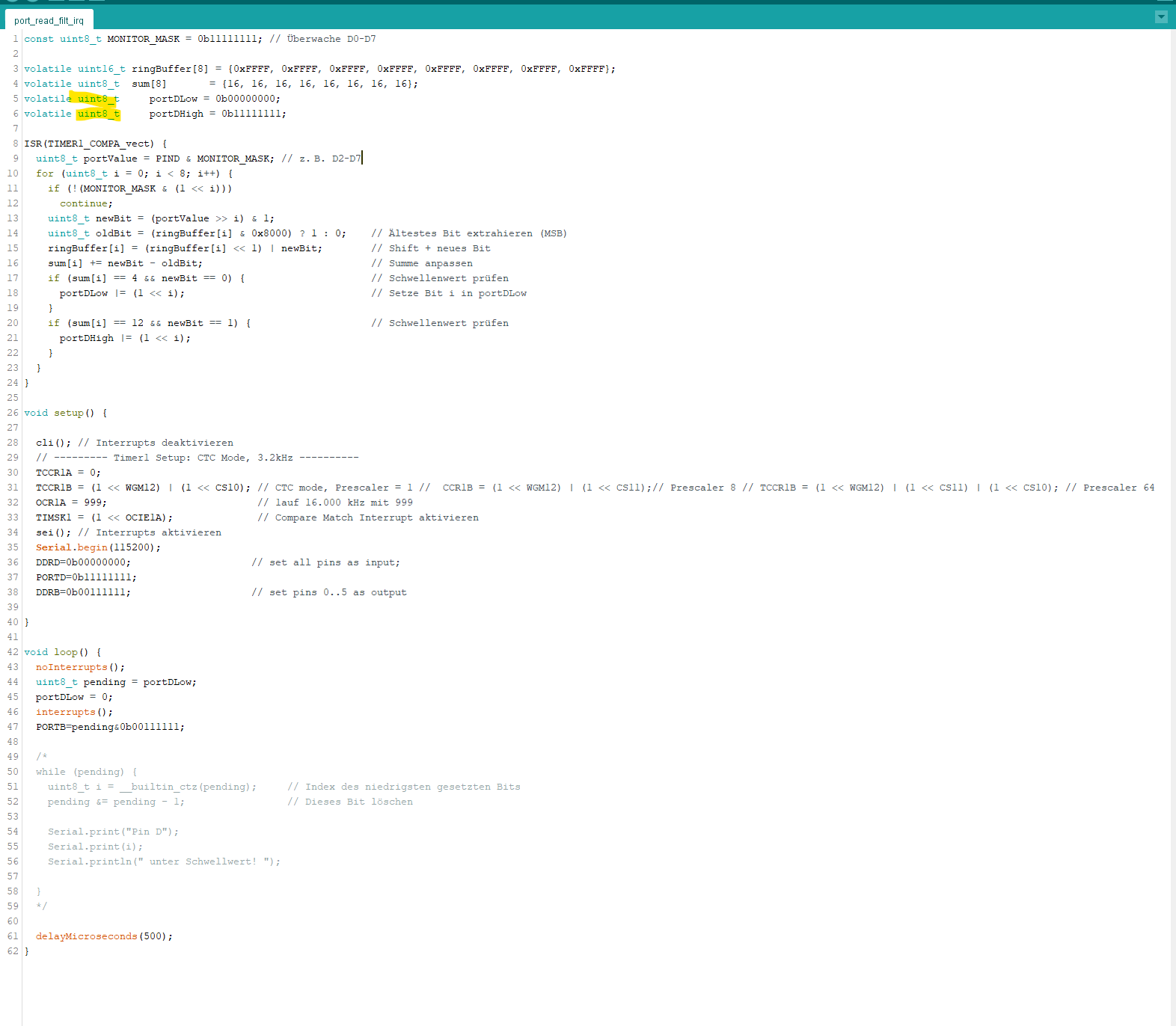
Roland F. schrieb: > Chantalle schrieb: >> aber es gibt auch anwendungen wo die probleme >> bereiten > > Kannst du mal ein Beispiel zeigen? Ich kann mal aus meiner Anwendung ein Beispiel zeigen, das filtert direkt die Signale eines ganzen Ports, basiert auf dem gleichen Prinzip wie Chantalle2000 beschrieben hat, aber effizient mit BIT Arithmetik, der Interrupt benötigt auf einem ATMEGA328 mit 16MHz weniger als 10us (8us-9us), der wird je nach Signallänge und Anwendung mit 1kHz bei Signal 16ms oder bei kürzeren Signalen z.B. 1ms mit 16 kHz aufgerufen, Anpassung OCR1A und Prescaler Das ganz funktioniert sehr robust auch mit Störungen, im Loop ist jetzt nur ein Demo statt der Code meiner Anwendung, das delayMiscoseconds steht beispielhaft für den restlichen Code. Zur Kontrolle mit dem Oszi wird der "erkannte Low Pegel" portDLow auf portB ausgegeben. im Ausdokumentierten Teil wird es Bit Selektiv bewertet, ist von der Anwendung abhängig was man möchte In meiner Anwendung liest ein mega2560 3 Ports ein von digitalen Signalen, Schaltkontakte Modellbahn, die bis zu über 20 Meter parallel zu den DCC Fahrstromsignalen liegen, ohne Probleme. Getestet mit einer Arbiträr Sequenz wo die Auslösedauer Nutzsignal der minimal Dauer / 2 entspricht und die Störpulse 50 mal länger sind als das was ich gemessen habe Grün unterstrichen ist das Signal was erkannt werden soll und blau unterstrichen ist der Bereich mit den Störrungen, die Störungen machen aber keine echten Nullpegel, die gehen vielleicht auf 1.5V bis 2V runter, das ist das Testsignal für die Software. Ein weiteres "analoges Testsignal" um dann incl. der RC Tiefpass Filterung zu testen gibt es ebenfalls
Angehängte Dateien:
{kind=link}
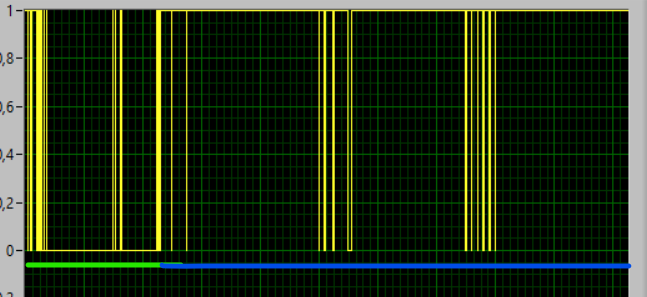
Lutz schrieb: > Roland F. schrieb: >> Chantalle schrieb: >>> aber es gibt auch anwendungen wo die probleme >>> bereiten >> >> Kannst du mal ein Beispiel zeigen? > > Ich kann mal aus meiner Anwendung ein Beispiel zeigen, das filtert Bei der Anpassung das es auf UNO auch läuft und Reduzierung auf ein einfaches Beispiel hat sich ein Fehler eingeschlichen, die Variablen in Zeile 5 portDLow und 6 portDHigh stehen auf BOOL, muss aber uint8_t sein, gerade gemerkt das es nur auf Pin D0 läuft
Lutz schrieb: > Lutz schrieb: >> Roland F. schrieb: >>> Chantalle schrieb: >>>> aber es gibt auch anwendungen wo die probleme >>>> bereiten >>> >>> Kannst du mal ein Beispiel zeigen? >> >> Ich kann mal aus meiner Anwendung ein Beispiel zeigen, das filtert > > Bei der Anpassung das es auf UNO auch läuft und Reduzierung auf ein > einfaches Beispiel hat sich ein Fehler eingeschlichen, die Variablen in > Zeile 5 portDLow und 6 portDHigh stehen auf BOOL, muss aber uint8_t > sein, gerade gemerkt das es nur auf Pin D0 läuft Ok, zur Kenntnis genommen, Code geliefert und negativ bewertet, aber im Vergleich zu Peters Routine läuft diese nun mal robuster Beide Routinen so den Interrupt eingestellt das bei Peters Routine bei einem 4ms Puls 4 mal abgetastet wird und da ich ja mehr werte abfrage das 12 mal abgetastet wird. Mit einer Testsequenz, 4ms Puls 3.5ms Puls 4.4ms plus + pos Störung 4.4 ms pos Störfolge bei meiner Routine werden die 4ms erkannt die 3.5ms bewusst nicht mehr, die 4.4ms + Störungen werden beide immer zuverlässig erkannt bei Peters Routine werden die 4ms erkannt die 3.5ms manchmal genauso wie die Pulse mit Störungen, die werden manchmal erkannt Das sind Fakten, aber wer nichts lernen möchte weil er alles weiß, darf gerne seinen Frust abbauen und negativ bewerten weil ich sein Ego verletzt habe
Nuri O. schrieb: > Dann hast du mich noch nicht programmieren sehen! Ich bin froh wenn mein > code die 100ms sieht :D > > Muss aber auch sagen, dass ich an programmieren nicht ganz so viel Spaß > habe. Dafür umso mehr an Schaltung aufbauen, rumspielen, messen und vor > allem neues lernen. Vielleicht wäre es an der Zeit, dass du uns mal deinen Code zeigst und wir dir Verbesserungsvorschläge machen. Eventuell kommst du dann schneller deine Hühnerklappe richtig ausgewertet wird, als wenn du einen Umbau deiner Hardware machst.
Lutz schrieb: > Ok, zur Kenntnis genommen, Du hast nicht zur Kenntnis genommen dass der TO keine SW-Lösung möchte. Er ist allerdings scheinbar an gar keiner Lösung mehr interessiert. Ansonsten hätte er längst mal Hintergrundinformationen geliefert. > Das sind Fakten, aber wer nichts lernen möchte weil er alles weiß, darf > gerne seinen Frust abbauen und negativ bewerten weil ich sein Ego > verletzt habe Du beweihräucherst dich vor allem am liebsten selbst, gehörst ja zu den privilegierten <10% die es können und richtig machen. Lutz schrieb: > Und ja, auch bei denen die das beruflich machen sind sehr viele die das > nicht gut machen, >90% Dich ruft man wenn sonst niemand mehr weiterweiß. > Ich weiß wovon ich da schreibe, weil irgendwer sucht dann ja die > ursachen
Alexander W. schrieb: > Vielleicht wäre es an der Zeit, dass du uns mal deinen Code zeigst und > wir dir Verbesserungsvorschläge machen. Eventuell kommst du dann > schneller deine Hühnerklappe richtig ausgewertet wird, als wenn du einen > Umbau deiner Hardware machst. Der Code ist doch im Anhang, was willst du eigentlich hier noch der vergleich vom Ergebnis https://youtu.be/K2aZe2dSWbM meine Routine, der erste Puls ist 4ms soll erkannt werden, der zweite ist 3.5ms soll nicht mehr erkannt werden, die beiden nächsten haben Störungen sollen aber erkannt werden weil ja auch 4.4ms lang, also min 4ms low das ist Peters Routine https://youtu.be/vDS2BaqkluQ der 4ms Puls wird sauber erkannt (habe den IRQ schneller laufen lassen wegen Vergleichbarkeit auf 1 kHz) die drei anderen werden mal erkannt mal nicht https://youtu.be/vDS2BaqkluQ
Jörg R. schrieb: > Du hast nicht zur Kenntnis genommen dass der TO keine SW-Lösung möchte. > > Er ist allerdings scheinbar an gar keiner Lösung mehr interessiert. > Ansonsten hätte er längst mal Hintergrundinformationen geliefert. > >> Das sind Fakten, aber wer nichts lernen möchte weil er alles weiß, darf >> gerne seinen Frust abbauen und negativ bewerten weil ich sein Ego >> verletzt habe > > Du beweihräucherst dich vor allem am liebsten selbst, gehörst ja zu den > privilegierten <10% die es können und richtig machen. Nein, beweihräuchern tun sich hier andere, die haben aber wie du ein Problem damit wenn man ihren Ego verletzt Es wurde mehrfach von denen geschrieben, "dann zeig mal den Code" obwohl er zigfach geteilt wurde Der TO war nicht an Software interessiert weil er es lieber in Hardware macht und weil er in Software nicht weiß wie es geht. Es wurden schlechte Hardwarelösungen vorgestellt, Monoflop, RS FlipFlop, was bei Störungen mit langen Leitungen, die ich erst mal annehmen würde und nicht ideale Welt voraussetzen würde, niemanden glücklich macht. Und dann wurde ja auch auf eine Software Routine verwiesen, wozu man ja sagen muss, für Schalter abzufragen in der Nähe des Boards ist die ok, und wenn es langsam sein darf, kann man Filter davorschalten. Für kurze Signalpulse zu entstören ist diese Routine aber weniger robust als heutige Stand der Technik, deswegen hatte ich diese Lösung aufgezeigt. Und trotzdem war dann eine der Antworten, "Du kannst Dich gerne auch sachlich zu meinen Beispielen äußern, aber das wird Dir nicht gelingen." Es ist so offensichtlich ...
Lutz schrieb: > Der TO war nicht an Software interessiert weil er es lieber in Hardware > macht und weil er in Software nicht weiß wie es geht. genau so ist es. Lutz schrieb: > Es wurden schlechte Hardwarelösungen vorgestellt, Monoflop, RS FlipFlop, > was bei Störungen mit langen Leitungen, die ich erst mal annehmen würde > und nicht ideale Welt voraussetzen würde, niemanden glücklich macht. denkst du wirklich, dass man das Problem in Hardware nicht lösen kann, oder kannst nur du es nicht? Es ist zwar nicht der Stand der Technik, aber für jemand, der Probleme mit der SW und Spaß am Basteln hat, keine schlechte Lösung. Und bei langen Leitungen mit unbekannten Störungen wirst du um Hardware nicht herumkommen, weil du bei einen zerstörten µC-Eingang mit SW nichts mehr korrigieren kannst.
Manchmal will man es halt hard lösen. Heute bin ich mit meiner Frau zum Rhein gefahren, um Schiffe zu gucken. Ein Stream bei Netflix hätte es auch getan, aber war halt nicht gewünscht.
R. L. schrieb: > denkst du wirklich, dass man das Problem in Hardware nicht lösen kann, > oder kannst nur du es nicht? Und schon wieder so eine unglaubliche arrogante Bemerkung weil ihr ja alles solche Helden seid. Ich weiß wie man das Problem in Hardware lösen kann, deswegen weiß ich, dass die vorgeschlagenen Lösungen wenn Störungen im Spiel sind nichts taugen, weil alles was irgendwie flankengetriggert ist löst eben auf Störungen aus, was letztendlich bedeutet das man erst mal filtern muss Schmitt Trigger mit Hysterese dahinter und dann mit der Flanke aufs FlipFlop, auch hier wäre dann ein RS FlipFlop die bessere Wahl als ein Monoflop, weil wenn der Puls so lange ist wie meine längste Programmlaufzeit und das Programm keine feste Durchlaufzeit hat, könnte ich den gleichen Puls auch 2x zählen, mit einem RS kann man es wie bei der Softwarelösung nach der Abfrage zurücksetzen, benötige ich dann 2 IO Pins um ein Signal abzufragen, ist spannend, ja, und für Spass kann man es so machen, aber wenn wir hier Lösungen diskutieren sollte es auch den Raum geben Verbesserungen aufzuzeigen. Somit, wenn das Signal auf einen µC geht dann gibt es bessere Lösungen in Software und auch da sind die Überlegungen zum Filter in Zusammenspiel mit der Software eine spannende Sache wenn man es optimieren will in puncto Robustheit. Peters Code für einen ATiny Tasten abzufragen ist ja genau für den Zweck auch eine gute Lösung, weil es im Zusammenspiel mit einem RC Tiefpass eine robuste Lösung liefert, für Signale die schneller sind und mehr Störungen haben ist es dann nicht mehr so robust aber mit ein klein wenig mehr Speicher und Rechenleistung kann man es deutlich robuster realisieren. Das muss man ja aufzeugen dürfen, aber dann heist es direkt "sachlich wird mir nicht gelingen" als ob diese Code so perfekt ist. Er ist gut wofür er gemacht wurde, genauso wie mein Code gut dafür ist, wofür er gemacht wurde, was aber ja nicht bedeutet das man damit jetzt jedes Problem lösen kann. Neue Probleme erfordern oft auch neue Lösungen, wobei es immer gut ist etwas über den Tellerrand zu blicken das man Lösungen für einen weiteren Bereich einsetzen kann
Lutz schrieb: > Und schon wieder so eine unglaubliche arrogante Bemerkung weil ihr ja > alles solche Helden seid. das sagt der richtige. Lutz schrieb: > das man erst mal filtern muss > Schmitt Trigger mit Hysterese dahinter hat jemand behauptet, dass man in HW nichts filtern muss, um Störungen zu eliminieren? Lutz schrieb: > Neue Probleme erfordern oft auch neue Lösungen, wobei es immer gut ist > etwas über den Tellerrand zu blicken das man Lösungen für einen weiteren > Bereich einsetzen kann das ist sicher nicht das primäre Anliegen des TO.
R. L. schrieb: > Lutz schrieb: >> Und schon wieder so eine unglaubliche arrogante Bemerkung weil ihr ja >> alles solche Helden seid. > > das sagt der richtige. Im Gegensatz zu deinen Aussagen sind meine nachvollziehbare Fakten und keine aus dem Zusammenhang gerissenen Halbwahrheiten Aber wenn du das nötig hast, dann tust du mir Leid
Lutz schrieb: > Alexander W. schrieb: >> Vielleicht wäre es an der Zeit, dass du uns mal deinen Code zeigst und >> wir dir Verbesserungsvorschläge machen. Eventuell kommst du dann >> schneller deine Hühnerklappe richtig ausgewertet wird, als wenn du einen >> Umbau deiner Hardware machst. > > Der Code ist doch im Anhang, was willst du eigentlich > > hier noch der vergleich vom Ergebnis > https://youtu.be/K2aZe2dSWbM > > meine Routine, der erste Puls ist 4ms soll erkannt werden, der zweite > ist 3.5ms soll nicht mehr erkannt werden, die beiden nächsten haben > Störungen sollen aber erkannt werden weil ja auch 4.4ms lang, also min > 4ms low > > das ist Peters Routine > https://youtu.be/vDS2BaqkluQ > > der 4ms Puls wird sauber erkannt (habe den IRQ schneller laufen lassen > wegen Vergleichbarkeit auf 1 kHz) > die drei anderen werden mal erkannt mal nicht > https://youtu.be/vDS2BaqkluQ habe gerade mal geschaut, 3 Leute habe sich die Videos angeschaut aber 5 haben den Post negativ bewertet Das sagt doch alles über euch aus
Lutz schrieb: > Das sagt doch alles über euch aus Das Verhalten dieser Community in diesem Fall erfüllt nicht den Anspruch eines Technikerforums. Es geht offenbar nicht mehr um: -Inhalte oder Lösungen, -Nachvollziehbare technische Argumente, -Faktenbasierte Diskussion, sondern viel zu oft um: -Dominanzgehabe, -Abwertung anderer, -Verteidigung des eigenen Weltbildes. im übrigen, ich hatte mir die Videos angeschaut und keine Bewertung zum Beitrag abgegeben, soviel dazu Interessanter Test um die Unterschiede der beiden Routinen aufzuzeigen
Lutz schrieb: > meine Routine, der erste Puls ist 4ms soll erkannt werden, der zweite > ist 3.5ms soll nicht mehr erkannt werden dann sollte man halt dafür sorgen das diese nicht auslösen, in PeDas Software ist schon mal ein guter Anfang und dafür sorgen das Störungen eben nicht einkoppeln. Wenn diese auslösenden 4ms in regelmäßigen Abständen kommen sperrt man halt weitere Auslösungen bis zum nächsten erwarten Impuls. Genauso habe ich Laser Triggerimpulse entstört da die Lasertrigger geplant regelmäßig kamen und nur zwischendurch Fehltrigerungen die nicht durchgelassen wurden.
Lutz schrieb: > hier noch der vergleich vom Ergebnis > https://youtu.be/K2aZe2dSWbM > > meine Routine, der erste Puls ist 4ms soll erkannt werden, der zweite > ist 3.5ms soll nicht mehr erkannt werden, die beiden nächsten haben > Störungen sollen aber erkannt werden weil ja auch 4.4ms lang, also min > 4ms low Willst du jedes Funkenfeuer, dass sich über mehr als 4ms erstreckt, als gültigen Puls ansehen? Oder nach welchen Kritierien soll ein gültiger 4ms-Puls von 4ms Störkram unterschieden werden? Wenn du einen vernünftigen Mittelwert bestimmen willst, um daran Gültigkeit, Dauer und Art von Störungen zu klassifizieren, oder wenn du kurze Störpulse als solche erkennen willst, musst du so schnell abtasten, dass die kurzen Störpulse aufgelöst werden.
Joachim B. schrieb: > dann sollte man halt dafür sorgen das diese nicht auslösen, in PeDas > Software ist schon mal ein guter Anfang und dafür sorgen das Störungen > eben nicht einkoppeln. Wer den Sinn einer Testsequenz nicht versteht sollte da erst mal bei sich selber anfangen und nicht herablassend erklären was man machen sollte. Es gibt keine Erwartung wann der nächste Puls kommt Die kürzesten gemessenen Pulse sind 8 ms, die längsten über 200ms Die Testsequenz dient einem objektiven Vergleich für die Trennschärfe zwischen Falschauslöung und Nichterkennung. Also warum soll man an einem vernünftigen Test was ändern
Rainer W. schrieb: > Willst du jedes Funkenfeuer, dass sich über mehr als 4ms erstreckt, als > gültigen Puls ansehen? Oder nach welchen Kritierien soll ein gültiger > 4ms-Puls von 4ms Störkram unterschieden werden? ź Nichts verstanden Die Pulse sind 8ms minimum, aber ab 4ms lass ich sie erkennen, alles schon beschrieben, und die Störpulse sind deutlich kürzer wie beschrieben, das ist die synthetische Testroutine, wird sozusagen übertestet, dann hat man Reserven Funkenfeuer, haha, lustig, kein Plan, DCC ist das digitalprotokoll, mit einer robusten Routine muss man die Kabel nicht separieren Mir zu erklären das etwas was zuverlässig funktioniert nicht funktionieren kjann weil ich das falsch mache, starke Nummer
Lutz schrieb: > Also warum soll man an einem vernünftigen Test was ändern ok ich wollte nur helfen, aber du weißt es besser es sind deine Störungen. Du erklärst auch nicht wo sie herkommen und wie man sie fernhalten kann, hier an Tastatur und Monitor kann das niemand für dich richten.
Joachim B. schrieb: > Lutz schrieb: >> Also warum soll man an einem vernünftigen Test was ändern > > ok ich wollte nur helfen, aber du weißt es besser es sind deine > Störungen. > Du erklärst auch nicht wo sie herkommen und wie man sie fernhalten kann, > hier an Tastatur und Monitor kann das niemand für dich richten. Wieso willst du mir helfen, ich habe zu der Fragestellung wie man Pulse empfangen und entprellen meine funktionierende Lösung vorgestellt Und wieso sagst du ich hätte nicht erklärt wo die störungen her kommen Das hatte ich beschrieben und auch das bei der Testsequenz die Störungen um Faktor 50 länger sind als gemessen Ursache der Störung auch beschrieben genau wie die Kopplung Für mich muss keiner was richten, meine Routine arbeitet robust Peters Routine nicht so robust
Chantalle schrieb: > Lutz schrieb: >> Das sagt doch alles über euch aus > > Das Verhalten dieser Community in diesem Fall erfüllt nicht den Anspruch > eines Technikerforums. > > Es geht offenbar nicht mehr um: > -Inhalte oder Lösungen, > -Nachvollziehbare technische Argumente, > -Faktenbasierte Diskussion, Dem TO wurde bereits im ersten Kommentar geschrieben wonach er suchen muss. 2 weitere Kommentare später habe ich ihm einen Vorschlag für einen entsprechenden Chip gemacht. Weitere sinnvolle Vorschläge folgten dann auch noch von anderen Usern. Der TO gibt aber keine detaillierten Informationen preis. Er kann auch nicht erwarten dass ihm hier eine entsprechende Schaltung gezeichnet wird, schon deshalb weil er sich viel zu wenig einbringt. Du und Lutz führen eine Diskussion die den TO überhaupt gar nicht interessiert, soviel hat er zumindest von sich gegeben. > sondern viel zu oft um: > -Dominanzgehabe, > -Abwertung anderer, > -Verteidigung des eigenen Weltbildes. Unsinn. Lutz schrieb: > Und schon wieder so eine unglaubliche arrogante Bemerkung weil ihr ja > alles solche Helden seid. Lutz schrieb: >>> Das sind Fakten, aber wer nichts lernen möchte weil er alles weiß, darf >>> gerne seinen Frust abbauen und negativ bewerten weil ich sein Ego >>> verletzt habe Arrogant und im Ego getroffen bist ausschließlich du selbst. Dazu kommt eine gehörige Portion Überheblichkeit. Du merkst allergisch nicht wie du hier auftrittst bzw. wie du teilweise wahrgenommen wirst. PS: Dafür dass du vorgibst Ingenieur zu sein hast du einen zum Teil grausamen Schreibstil.
Lutz schrieb: > Funkenfeuer, haha, lustig, kein Plan, Lutz schrieb: > Für mich muss keiner was richten, Lutz schrieb: > Mir zu erklären das etwas was zuverlässig funktioniert nicht > funktionieren kjann weil ich das falsch mache, starke Nummer Lutz, wenn man solche Dinge, und auch viele andere von Dir, lesen muss - dann erweckst Du keinen guten Eindruck, kannst mit anderen Menschen nicht gut kommunizieren und bist ein Selbstdarsteller... Meine Meinung!
R. L. schrieb: > die meisten, die hier 24 Stunden im forum sind, wollen nicht primär > helfen, sondern ihr ego aufbessern. Mit freundlicher Hilfe für andere > durch Fachwissen gelingt das nur wenigen. Andere niedermachen, als > unfähig bezeichnen und beleidigen ist für die meisten die einzige > Möglichkeit. Deine Sichtweise, Deine Empfindung!
Lutz schrieb: > Funkenfeuer, haha, lustig, kein Plan, DCC ist das digitalprotokoll ... Aus Sicht des "Hühnerklappensignals" ist das kein Unterschied. Das Hühnerklappensignal ist das Nutzsignal und der Rest ist Müll aka Störung. Mit der im Anfangspost genannten Signalverlängerung verlagert man lediglich das Problem. Im einen Fall muss die Software ausreichend häufig abtasten, damit die überkoppelnden DCC-Signale herausgefiltert werden können, im anderen Fall muss das Eingangssignal der Pulsverlängerungsmimik gefiltert werden, damit keine Fehltrigger auftreten. In jedem Fall sollte erstmal definieren, was gültige Signale sind und dann muss ausreichend häufig abtasten, um sie zu erkennen. Nuri O. schrieb: > 24V Impuls von ca. 1 ms Lutz schrieb: > Die kürzesten gemessenen Pulse sind 8 ms, die längsten über 200ms Lutz schrieb: > bei meiner Routine werden die 4ms erkannt die 3.5ms bewusst nicht mehr, Lutz schrieb: > hier noch der vergleich vom Ergebnis > https://youtu.be/K2aZe2dSWbM > ... Tolle Links: Video nicht verfügbar Dieses Video wurde vom Uploader entfernt Wie soll man da über irgendetwas diskutieren :-(
Rainer W. schrieb: >> https://youtu.be/K2aZe2dSWbM >> ... > > Tolle Links: > Video nicht verfügbar > Dieses Video wurde vom Uploader entfernt > > Wie soll man da über irgendetwas diskutieren :-( Heute willst du diskutieren, sah gestern anders aus Gestern habe ich die Videos gesehen
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.