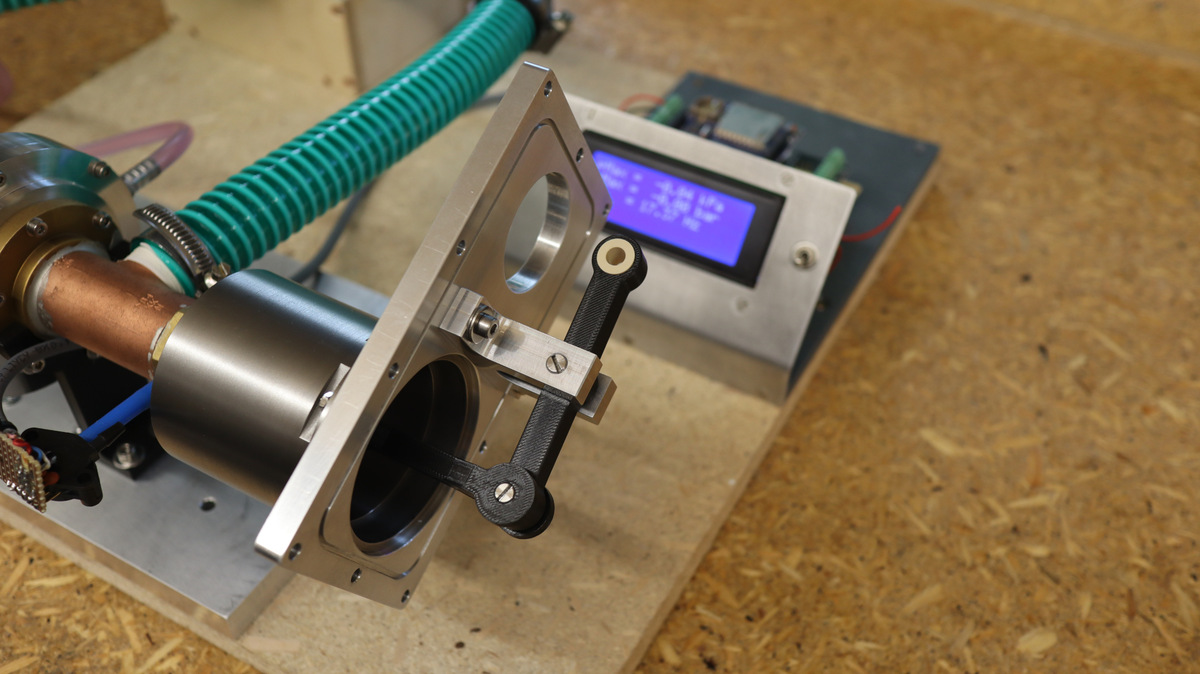
Ich benötige für meinen Thermoakustischen Stirlingmotor einen Generator zum einen natürlich um die mit eigenem Biogas erzeugte Leistung zu nutzen, aber vor allem erstmal um einen Leistungsindikator für die noch sehr notwendige Weiterentwicklung und Leistungssteigerung zu bekommen. Noch liefert der Motor nur wenige Watt, er soll aber in die Leistungsregionen meiner kinematischen Stirlingmotoren von ca. 300 Watt kommen. Ich habe nur eine ozilierende Bewegung, diese in eine Rotation mit z.B. einem einfache Schubkurbelgetriebe umzuwandeln ist leider nicht so einfach da hier durch den festgelegten Hub zu sehr die Resonanz verändert wird und die Leistung sehr schnell negativ beeinflusst wird. Wenn der Motor fertigentwickelt ist, ist dies sicher möglich aber für die vielen folgenden Veränderungen und Experimente ist das nicht sinnvoll. Natürlich liegt der Gedanke an einen Lineargenerator sehr nahe, ich habe mich damit auch die letzten Monate intensiv auseinandergesetzt und diverse Prototypen (hauptsächlich zum lernen!) gebaut aber einen guten Lineargenerator zu entwerfen und zu bauen ist sehr aufwändig und dauert mir zu lange, da ich ja eigendlich den Stirlingmotor weiterentwickeln möchte. Nun braucht ein radialer Generator (also ein normaler Motor) ja garnicht zwingend eine komplette Rotation, sondern kann auch nur hin- und herschwingen auch wenn das sicher nicht optimal ist. Ich treibe mit dem Stirling einen Hebel an über den ich den Lineragenerator bewegen wollte und der für die Auswuchtung genutzt wird. Wenn ich nun im Drehpunkt des Hebels einen radialen Generator antreibe, würde er um ca 75 Grad oszillieren. Optimalerweise sollte der Generator im Motorbetrieb auch in der Lage sein den Motor (wenn druckaufgeladen im geschlossenen Gehäuse!) zu starten d.h. ein ordendliches Drehmoment bei Oszillation wäre gut. Ich habe mich die letzten Tage in das Thema eingearbeitet und erstmal zwei Möglichkeiten ausgelotet: Schrittmotor der NEMA 8-11 Klasse: -Hohe Spannung bei niedriger Drehzahl -Preiswert, einfach anzusteuern -Leichte Ansteuerung mit hohem Drehmoment für den Starvorgang -Schlechter bis unakzeptabel schlechter Wirkungsgrad BLDC Motor: -niedige Spannung bei niedriger Drehzahl -teuerer, schwieriger anzusteuern -Schwierige Ansteuerung mit niedrigem Drehmoment für den Startvorgang -besserer bis guter? Wirkungsgrad Was haltet ihr davon, habt ihr noch andere Ideen? Welcher BLDC Motor würde sich am besten für eine oszillierende Bewegung eignen, welche Ausführung bietet das höchste Drehmoment bei niedriger Drehzahl? Erstmal muss der Motor noch recht Leistungsschwach gewählt werden da die Leistung des Stirlings noch nicht so hoch ist. Lohnt sich ein Qualitätsmotor wie Maxon oder geht auch ein Motor aus dem RC Bereich? Die Ansteuerung über ein Bidirectionales ESC (Electronic Speed Controller) mit dem Arduino ist wohl die einfachste Lösung, mit Treiber IC wird es wieder sehr kompliziert bietet aber volle Kontrolle. Wird es überhaupt möglich sein oszillierend ein nennenswertes Drehmoment zum Starten des Stirlingmotors zu bekommen? Sobald ich Zeit finde werde ich mal ein paar Wirkungsgradtests mit Schrittmotoren durchführen und mal sehen was dabei herauskommt, ich habe da nichts wirkilch aussagekräftiges zu im Netz gefunden. Damit ihr euch ein Bild von meinem Thermoakustischen Stirlingmotor machen könnt, hier ein Link zu einem Video: https://youtu.be/jNkprcVqVs4?si=Iqhy5Em8CGneFJ-o (Im meinem neuesten Video über 3d Druck ist ab Sekunde 20 der oszillierende Hebel in Betrieb zu sehen) Sorry für schon wieder so viel Text aber Danke für euer Interesse und eure Hilfe!
Angehängte Dateien:
-

Lever.JPG
210 KB
Ralf schrieb: > Was haltet ihr davon, habt ihr noch andere Ideen? Lautsprecher. Du treibst die Schwingspule eines (300W) Lautsprechers mit deiner hin und her Bewegung an und richtest die Spannung gleich (aktiver Gleicrichter). Wenn du nun Strom entnimmst, dämpft du die Schwingung, du musst also eine Regelung aufbauen, die den Stirling gerade so viel Energie entnimmt, das er optimal arbeitet. Du brauchst also keinen Linearmotor mit mehreren Polen, sondern nur 1 Spule.
Michael B. schrieb: > Lautsprecher.... Wow, ein neutraler, sachlicher und informativer Beitrag vom Laberkopp. Hat dich das sehr viel Überwindung gekostet?
J. T. schrieb: > Michael B. schrieb: >> Lautsprecher.... > > Wow, ein neutraler, sachlicher und informativer Beitrag vom Laberkopp. > Hat dich das sehr viel Überwindung gekostet? Warum meckerst Du gleich los. Lasse den Thread doch erst mal losrollen. Über diesen Hebel verschlechtert man den Wirkungsgrad. Andererseits kann man das Anlaufverhalten verbessern. Ist nicht einfach, was jetzt mehr Effizientes bringt. Interessantes Thema. Gefällt mir sehr gut.
Wie könnte man die Regelung wieviel Energie dem Stirling entnommen wird realisieren? Ich bin in Elektronik kein Experte, darum schreibe ich ja hier. Der Generator liefert seinen Strom z.B.an einen Laderegler und wie könnte ich am besten den Stromfluss dahin am effizientesten begrenzen um eine Regelung zu realisieren? Ich höre in Bezug auf Stepper als Generator viele gegensätzliche Meinungen, von völlig ungeeignet bis bster wirkungsgrad... Habe schon angefangen eine Prownsche Bremse zu bauen und werde damit anfangen einen kleinen NEMA 17 von meinem alten Ender3 mit einem Maxon Motor anzutreiben und über das abgegebene Drehmoment und die Drehfrequenz den Wirkungsgrad zu messen. Da der Diodengleichrichter (je nach erzeugter Spannung) recht viel Leistung verbrät habe ich hier auch ein paar aktive Dioden, mal sehen ob das funktioniert und ob es eine Verbesserung bringt...
Der Ecopower 1.0 von Vaillant mit ca. 1 kW el. Leistung ist ein Stirling mit Gasheiztherme. Tolles Konzept eigentlich. Vielleicht kann man sich da etwas abgucken.
Michael B. schrieb: > Lautsprecher. Um den Hub (des Luftweges) anzupassen kann das Prinzip vom Exponentialhorn angewendet werden. Es ist auch möglich den Lautsprecher auf der Breitseite zu haben und den Stirling an der Schmalseite. Zum Beispiel: Lautsprecher mit 1cm Hub und 20cm Durchmesser kann so zum Beispiel an fast 4cm Hub und 10cm Durchmesser angepaßt werden.
Ralf schrieb: > Prownsche Bremse Erstaunlich, ein Begriff, den keine mir bekannte Suchmaschine finden mag -- oder bezahlt der "sympathische" Protzeauto-Hersteller aus Zuffenhausen so viel Schmiergeld, dass nur dessen Bremsen "gefunden" werden? Grüße, Volker
Wird auch Prownscher Bremszaum genannt, in einem 10 Jahre altem Youtube Video benutze ich ihn um den Wirkungsgrad des oben benannten Maxon Motors zu bestimmen: https://youtu.be/k3XNxzmMoWI?si=3bquJOXVFQID30MT
Ralf schrieb: > Wie könnte man die Regelung wieviel Energie dem Stirling entnommen wird > realisieren MPPT Regler zum Ladestrom in den Akku, oder Wärmemengenregler um genau so viel Energie in den Stirling zu stecken damit der Hub und damit die Ausgangsspannung der Spule ausreichend für die Last bleibt (und bei Belastungsverringerung nicht Energie ungenutzt bleibt).
Ralf schrieb: > Wird auch Prownscher Bremszaum genannt, in einem 10 Jahre altem Youtube > Video benutze ich ihn um den Wirkungsgrad des oben benannten Maxon > Motors zu bestimmen: Danke. Leider erkenne ich keine Details. Wiki kennt einen "Pronyschen Zaum": https://de.wikipedia.org/wiki/Pronyscher_Zaum ...den ich, naiv wie ich bin, als Backenbremse bezeichnen würde, die ihr Reaktionsmoment auf einer Waage abstützt. Wo kommt denn die Manie her, jede noch so einfache Konstruktion (oder Schaltung) nach einem (vermeindlichen) "Erfinder" zu bennennen? Ist das das gleiche Phänomen wie die Sucht nach unverständlichen Akronymen, also eine Art "Jägerlatein"? Grüßle, Volker
Moin Volker B., also, eine Manie ist das nicht, es ist als Ehrung gedacht. Schon mal den Nutzen eines Röntgen-Gerätes selbst erfahren (z. Bsp.) ? Bei der Wahl des richtigen E-Technik Studiums lernt jeder den Pronyschen Zaum im E-Maschinen Labor kennen, ist also (gähn) ein alter Hut, auch wenn man heute Drehmoment-Messungen mit Dehnungsmessstreifen-Anordnungen o.ä. macht. Übrigens: die Einheit Volt wurde nach Alessandro Volta benannt (1745-1827). die Einheit Ampere nach André-Marie Ampère (1775-1836), Manie?? Zur Klarstellung: TESLANOL wurde nicht von Nicola Tesla entwickelt..... Gruß, W.
@Wolfgang: Genau in den späteren Stirlingmotoren habe ich die Leistung über eine Wägezelle (mit Dehnungsmeßstreifen) und einen Drefrequenzsensor mit dem Arduino erfasst. @Michael: Ich meinte wie man die entnommen Leistung aus dem Resonanzkreislauf am besten über die elektrische Last regeln könnte. Bisher habe ich in Testläufen für die kinematischen Stirlingmotore einzelne Halogen Birnchen (10 mal 10-100W) zu- und abgeschaltet. Vielleich kann man dies elegant regeln. Ein (Solar)Laderegler regelt ja nach der maximalen Leistung, hier müsste man noch andere Parameter berücksichtigen. Vielleicht hat jemand einen Ansatz wie man dies mit elektronischen Bauteilen effektiv zur Akkuladung realisieren könnte und dann mit einem Mikrocontroller die Regelung übernehmen.
Angehängte Dateien:
-

Kondensatoren.JPG
210 KB -

Gleichrichtung.JPG
240 KB -

Dioden.JPG
210 KB

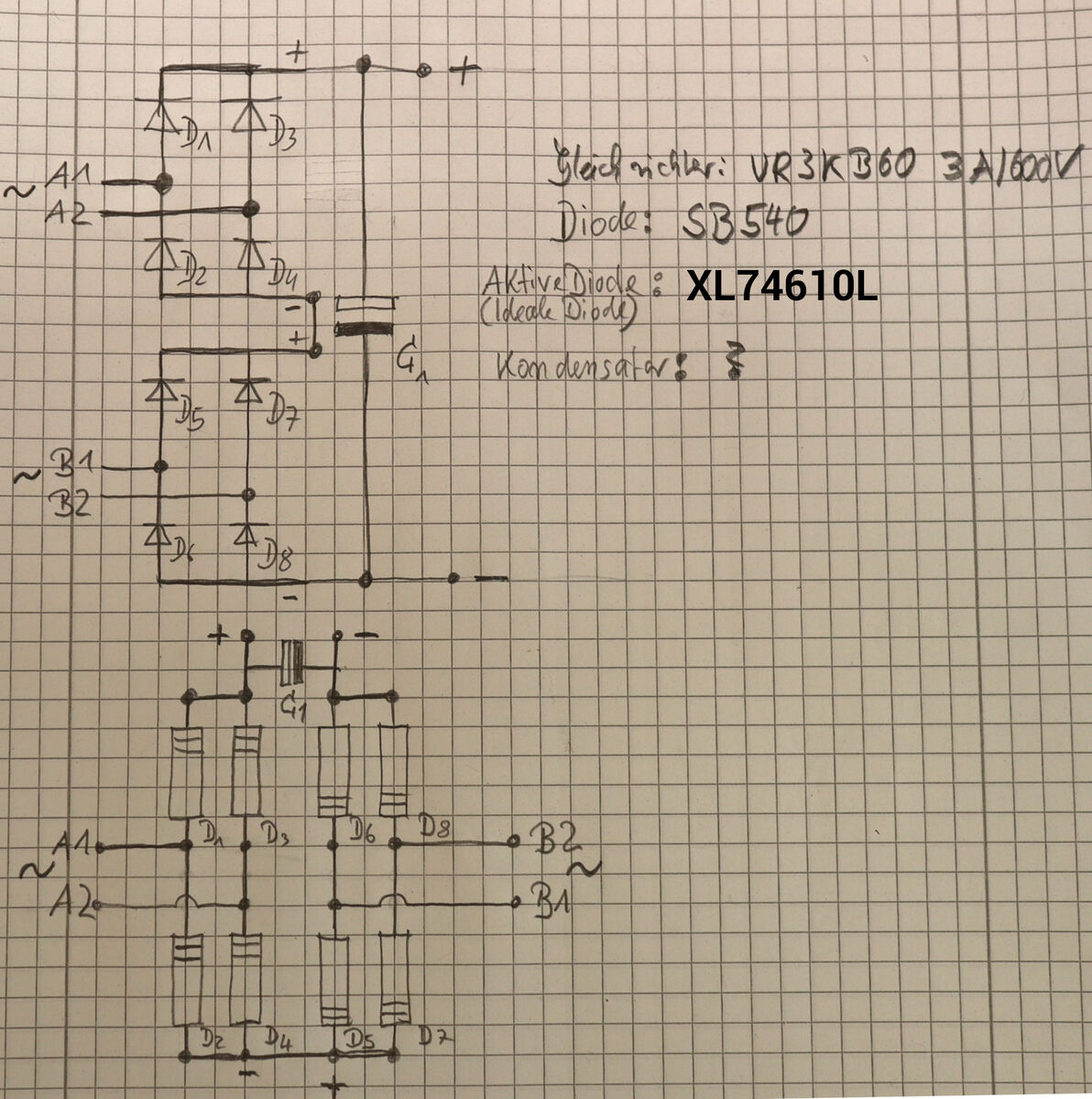
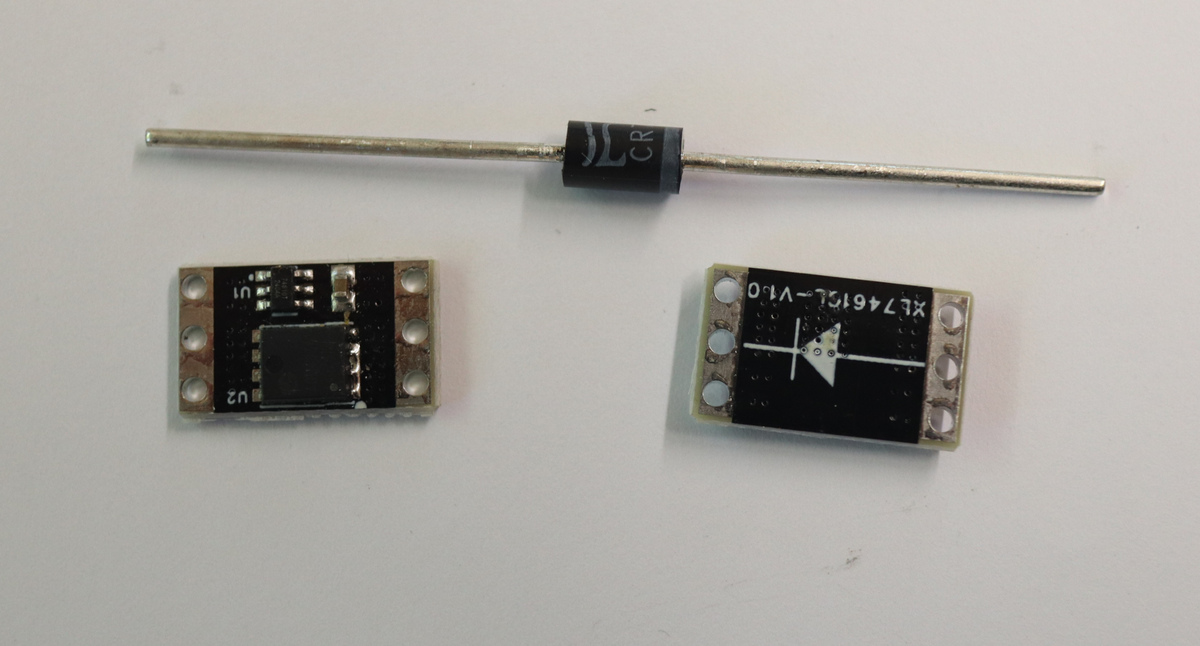
Ich habe vor, den Wirkungsgrad eines Schrittmotors über eine Prownsche Bremse (prony brake) zu messen. Dazu ist es nötig die beiden Wicklungen (A/B) gleichzurichten und zu glätten um dann die erzeugte Leistung aus V/A mit der mechanischen eingebrachten aus Drehmoment und Drehfrequenz zu vergleichen. Ich habe mal eine grobe Skizze gemacht, könnte das so funktionieren? Ist die Glättung mit nur einem Kondensator sinnvoll oder wäre eine andere Schaltung mit zwei Kondensatoren o.ä. besser? Ist die Dimensionierung der Bauteile ok (sind halt vorhanden!) Dioden: SB540 alternativ fertiger Brückengleichrichter VR3KB60 3A/600V aktive Dioden: XL74610L diverse Kondensatoren, siehe Bild Je nach produzierter Spannung (Ich glaube so ein NEMA17 erzeugt bei höherer Drefrequenz schon ein paar dutzend Volt?) hat der Spannungsabfall der Gleichrichterdioden einen großen negativen Einfluss und könnte man diesen durch aktive (ideale) Dioden minimieren? Kann ich die vorhandenen aktiven Dioden XL74610 einfach gegen die herkömmlichen Dioden ersetzen oder funftioniert das so nicht und ich bekomme Kurzschlüsse o.ä.? Vieln Dank schonmal für eure Hilfe!
Wolfgang D. schrieb: > Moin Volker B., > also, eine Manie ist das nicht, es ist als Ehrung gedacht. Schon mal den > Nutzen eines Röntgen-Gerätes selbst erfahren (z. Bsp.) ? Hallo Wolfgang, Was war denn das große Verdienst des Herrn Prony? Warum heißt das Auto Auto und nicht Daimlerscher Motorwagen? > Bei der Wahl des richtigen E-Technik Studiums lernt jeder den Pronyschen > Zaum im E-Maschinen Labor kennen, ist also (gähn) ein alter Hut Vor 80 Jahren vielleicht! Wir hatten in den 1980ern bereits Pendelmaschinen (die vermutlich nicht vom Herrn Pendel "erfunden" wurden). Was'n Bullshit! > Übrigens: die Einheit Volt wurde nach Alessandro Volta benannt > (1745-1827). Ach! Wäre es möglich, dass die Verdienste des Hrn. Volta geringfügig größer sind als die des "Erfinders" einer Backenbremse? Warum benennen wir das Rad nicht nach einem verdienten Steinzeitmenschen? > die Einheit Ampere nach André-Marie Ampère (1775-1836), Manie?? Nein, die Ehrung einer echten Leistung! > Zur Klarstellung: TESLANOL wurde nicht von Nicola Tesla entwickelt..... OMG! Volker
Angehängte Dateien:
-

20250621_165446.jpg
15 KB
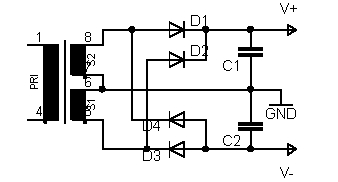
Ralf schrieb: > hat der Spannungsabfall der Gleichrichterdioden einen großen negativen > Einfluss und könnte man diesen durch aktive (ideale) Dioden minimieren? Du könntest statt zwei Gleichrichter nur einen Gleichrichter einsetzen, dann hast du den Spannungsabfall schon mal um die Hälfte reduziert.
@Marcel: Das verstehe ich nicht richtig, verliere ich da nicht die Hälfte der Wechselspannung, die jeweils in die Mitte an GND geht?
Moin Volker, der Pendelmaschine wurde sicherlich deshalb kein Erfindername verpasst, weil sie schlicht und einfach die Fortführung des Pronyschen Zaums ist, mit dem unwesentlichen Unterschied, dass das Lastmonent elektromotorisch anstelle durch Reibung erzeugt wird. Gruß, W.
> Ich habe nur eine ozilierende Bewegung, diese in eine Rotation > mit z.B. einem einfache Schubkurbelgetriebe umzuwandeln ist > leider nicht so einfach Würde ich auch dringend davon abraten, viele bewegte Teile und Lager --> viel Probleme mit der Zeit Schau, wie es die Leute von Sunpower machen: Der Tipp ist aus einem Kommentar zu deinem Video: @jamesmaclean2 vor 1 Monat Yes, I have been building these Engines & Generators for 40 years. Here is everything you need to know about FPSE & Linear Generators...Also you are correct, the Magnet Mass is too heavy, the solution is also in this video. How Does a Sunpower Stirling Cryocooler Work? Sunpower Free-Piston Stirling Cryocooler Animation https://www.youtube.com/watch?v=ZSJFPb8030g TheSignalPath hat ein rel. neues Video, in dem er aus Luft flüssigen Sauerstoff mithilfe eines Cryocoolers gewinnt: TCP #1 - From Electricity to Liquid Oxygen! Magic of Thermodynamics, Cryocoolers & Oxygen Capture https://www.youtube.com/watch?v=kakZ_fhfUHU Ab der 20. Minute wird es interessant für Dich. Vielleicht gelingt es Dir, einen solchen zu bekommen, oder Du schaust Dir an, wie sie aufgebaut sind.
@Torsten: ja das habe ich mir intensiv angesehen und ist eine sehr interessante Option wenn der Motor schon etwas weiterentwickelt ist. Jetzt brauche ich aber erstmal schnellere Ergebnisse und möchte einen "normalen" Motor als Generator verwenden um schnellere Ergebnisse zu bekommen. Heute abend wede ich erstmal Wirkungsgradversuche mit einem NEMA17 Stepper aus meinem alten Ender 3 machen. Ich habe noch ein fertiges Brückengleichrichter-Board bestellt da ich nicht recht weiss ob das mit den einzelnen aktiven Dioden so funktioniert. Gibt es leider nur in China und dauert etwas...
Weis jetzt nicht welche Spannung der Generator (Stepper) macht. Aber warum nimmst Du für den Anfang nicht Beipassdioden aus dem Solarbereich, wie die SBX2040 oder ähnlich? Die SB540 macht bei 1A (25Grad Celsius) 0,43V Vf. Die SBX2040 macht bei 1A weniger als 0,3V Vf. Siehe Datenblatt. Um den Aktiven Gleichrichter kann man sich später kümmern. Wenn man noch läppische 1-2W rausholen will. Spare nicht an 2-3 Euro. Kümmere dich erst mal um die wichtigen Sachen. Wie so eine Art MPPT. Oder bist Du BWLér? :-) Den besten Wirkunsgrad bringt der Linearmotor, und möglichst wenig Masse bewegen. Deswegen ja auch die Schwingspule im Lautsprecher. https://cdn-reichelt.de/documents/datenblatt/A400/SBX2040-3G_1.pdf https://cdn-reichelt.de/documents/datenblatt/A400/SB5XX_ENG_TDS.pdf PS: Welchen Hub mach das Gerät eigentlich?
Wolfgang D. schrieb: > Pronyschen Zaums Kannst du jetzt eigentlich irgendwo eine Quelle nennen wo diese "geniale" Idee erklärt wird, oder kannst du nur den Besserwisser geben der damit angibt es zu wissen aber in Wahrheit keine Ahnung hat.
Angehängte Dateien:
-

Efficiency_Measurement.JPG
220 KB
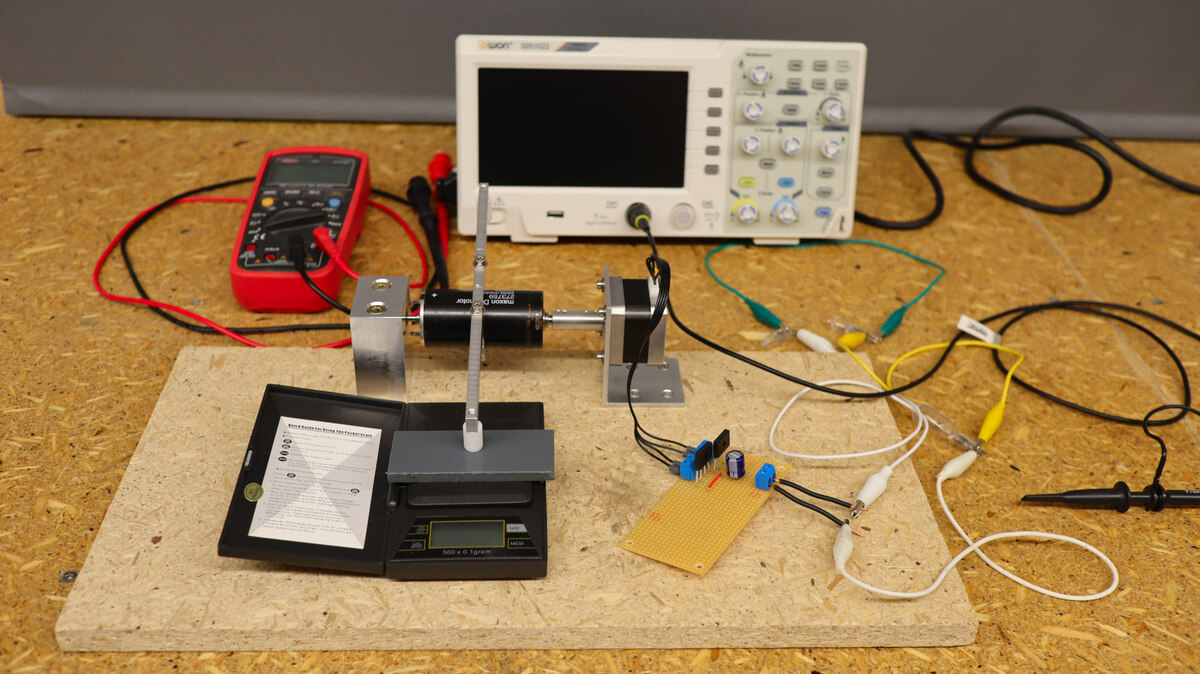
Danke für den Tipp mit den Solar Bypass Dioden, die werde ich mir besorgen. Es geht mir erstmal gar nicht um den besten Wirkungsgrad für die Energierzeugung ich will ja eh erstmal nur einen Leistungsindikator haben. Aber ich habe jetzt den Teststand für Wirkungsgradtests für verschiedene Motoren im Generatorbetrieb gebaut und dort möchte ich natürlich möglichst unverfälschte Ergebnisse haben. Ich habe jetzt die Gleichrichterschaltung mit Kondensator gelötet (erstmal mit fertigen Brückengleichrichtern) und den Teststand fertiggebaut. Jetzt habe ich aber erstmal genug und mache morgen mit Messungen weiter... Der NEMA17 gibt beim Drehen mit der Hand und drei halogenbirnchen als Last schon ein paar Volt DC, ich bin auf die Ergebnisse morgen gespannt.... Der Hub beträgt im Moment maximal 50 mm und wird durch den Hebel- und Kolbenweg begrenzt, ich brauche (spätestens wenn die Leistung steigt) einen größeren Kolben- oder Membrandurchmesser. Ein Lineargenerator ist das Langzeitziel ist aber im moment nicht die Priorität da meine Zeit leider begrenzt ist, schade...
Udo S. schrieb: > Wolfgang D. schrieb: >> Pronyschen Zaums > > Kannst du jetzt eigentlich irgendwo eine Quelle nennen wo diese > "geniale" Idee erklärt wird Den Wiki-Artikel habe ich oben bereits verlinkt: Beitrag "Re: Generator für Thermoakustischen Stirling Linear/Stepper/BLDC?" Wenn man den Namen korrekt schreibt, finden sich auch Erklärungen dazu. Nur mit dem dem verballhornten Namen "Prownsche Bremse", den der TO nutze, war die Suche unmöglich... Merke: Man sollte den Namen des Erfinders auch korrekt schreiben, wenn man ihn ehren will! :-) Grüßle, Volker
Angehängte Dateien:

Ja, entschuldigung ich habe den Pronyschen Zaum aus dem Gedächtnis benannt, sollte ich vorher nochmal nachsehen, letzte Messung damit ist lange her.... Naja jedenfalls habe ich gerade die ersten Wirkungsgradmessungen mit einem NEMA 17 Schrittmotor aus meinem alten Ender 3 gemacht und ich bin positiv überrasch wie gut der Wirkungsgad ist. Mit 3 Halogenbirnchen als Last ( sicherlich nicht der optimale Punkt) und Drehfrequenzen von 488 und 790 1/min bekam ich einen Wirkungsgrad von 0,56 und 0,63. Und das mit zwei einfachen überdimensionierten Brückengleichrichtern die bei 7,2V/0,206A und 11,5V/0,26A auch noch einen kleinen Einfluss haben. Das ist fast so gut wie der antreibende Maxon Motor den ich mal vor Jahren vermessen habe, es sei denn ich habe zufällig gerade mit den zwei Messungen den optimalern Arbeitspunkt getroffen. Das müssen jetzt weitere Messungen in den nächsten Tagen zeigen. Aber mir scheint die schnelle Schrittmotorlösung durchaus einen Versuch wert.
Sind natürlich nur erste, grobe Messungen und das muß ich noch mit dem Oszilloskop nachprüfen ob die elektrischen Werte in etwa stimmen. Aber als ersten Anhaltspunkt finde ich das sehr ermutigend...
Angehängte Dateien:
-

Voltagemeasure01.JPG
240 KB -

VoltagemeasOszi.JPG
230 KB
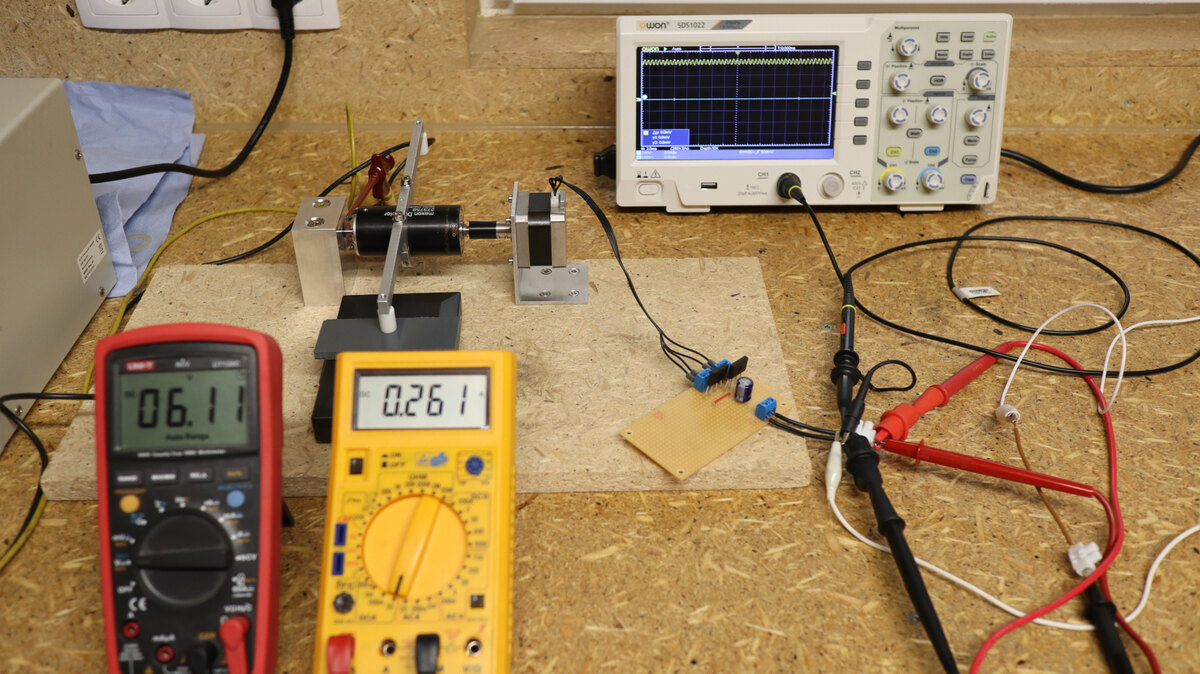
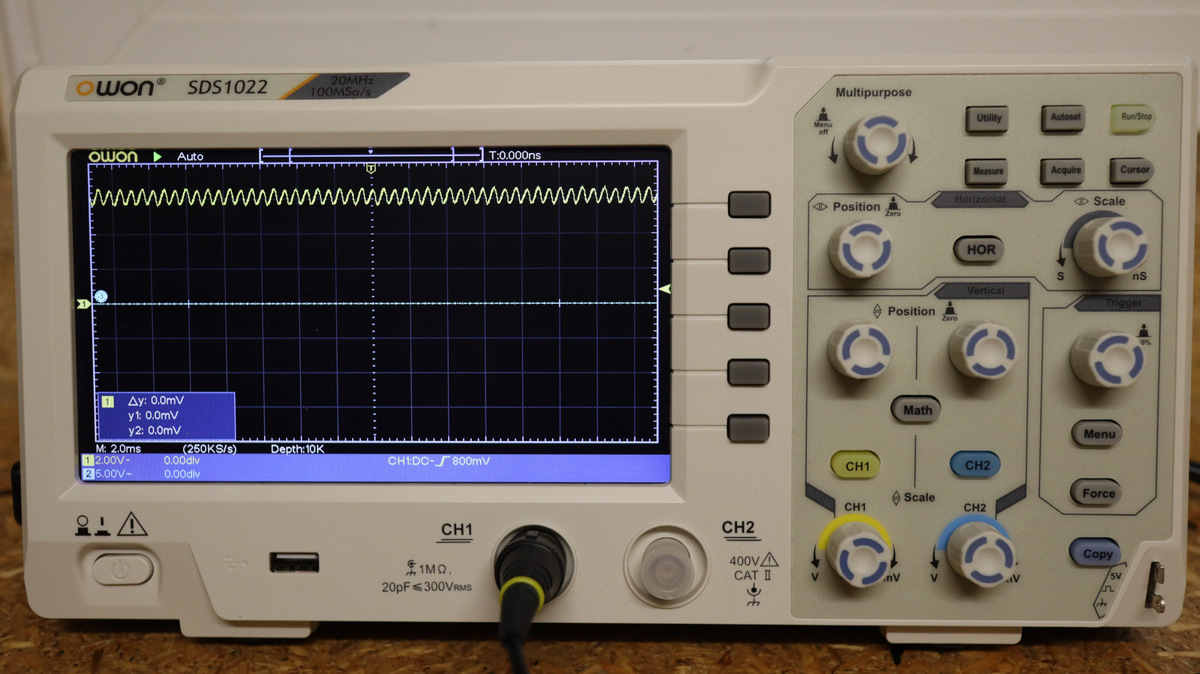
Ich habe jetzt mal die Spannung mit dem Oszilloskop kontrolliert und das sieht glaube ich recht stabil aus. Den Strom mit dem Oszilloskop messen muss ich doch jetzt nicht mehr unbedingt, oder könnte es dort noch Überraschungen geben? Die Brückengleichrichter werden ganz schön warm, hier wird also auch noch einiges an Energie verbraten. Ich finde den Wirkungsgrad des billigen Schrittmotors wirklich beachtlich und werde am Wochenend systematische Tests machen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.