Hallo, ich bräuchte einen bestimmten Faulhaber Glockenankermotor mir Encoder und Getriebe: Motor: Faulhaber 1524E012SR IE2-512 (Durchmesser 15mm, Länge 24mm, 12V, Kugellager, Encoer mit 512 Pulse pro Umdrehung) Getriebe: Faulhaber 15/5 S 22:1 (Durchmesser 16mm für 15mm Motor, Länge mit Motor 40.8mm, 3mm Schaft, Kugellager, Stahl Zahnräder, Untersetzung ca. 22:1) Hat jemand eine Idee wo ich diesen Motor mit Getriebe bekommen könnte? Oder hat vielleicht sogar jemand diesen Motor mit oder ohne Getriebe abzugeben? Viele Grüße Flo
Florian R. schrieb: > Hat jemand eine Idee wo ich diesen Motor mit Getriebe bekommen könnte Bei Faulhaber.com online parametrieren?
Florian L. schrieb: > Bei Faulhaber.com online parametrieren? Ein solcher Encoder wird nicht mehr hergestellt.
Organspender suchen od. Datenblatt mit ähnlichem? https://www.faulhaber.com/en/products/series/1524sr/
Angehängte Dateien:
-

rotor.jpg
240 KB

Danke für eure Kommentare. Meine Anfrage bei Faulhaber hat leider bisher nur zu dieser Antwort geführt: "Leider ist es uns nicht möglich, Bestellungen von Ersatzteilen direkt zu bearbeiten." Vielleicht hätte ich aber auch einfach nicht erwähnen sollen, dass ich den Motor als Ersatzteil brauche. > Ein solcher Encoder wird nicht mehr hergestellt. Das könnte sein. Aktuelle Datenblätter listen einen IE2-1024 als "kleinsten" Encoder. Ich würde einen Encoder mit mehr als 512 Pulsen nehmen, dann würde ich einen Controller dazwischen hängen, der dann den 512 Pulse Encoder emuliert. > Organspender suchen od. Datenblatt mit ähnlichem? Organspender wäre super, ich habe aber noch keinen gefunden. Einen 1524T012 mit 485:1 Getriebe habe ich bei AliExpress aufgetrieben, leider hat er keinen Encoder. Vielleicht könnte ich einen magnetischen Encoder drauf basteln, aber alles muss in ein 16mm Rohr passen, die Welle steht hinten natürlich nicht raus und der Motor scheint zugeklebt zu sein, alles nicht so einfach. Die von dir verlinkten 1524RS mit T statt E scheinen leichter beschaffbar zu sein. Sogar RS hat den 1524T012RS. Die T und E Version sind ähnlich. Kann sogar sein, dass sie sich nur dadurch unterscheiden, dass E ein Ritzel auf der Welle hat. Ich hab die Reste des alten Motors, vermutlich würde ich das Ritzel irgendwie runter und auf einen anderen Motor drauf bekommen. Interessanterweise listen verschieden alte Datenblätter deutlich verschiedene Werte, ein Datenblatt von 2020 für den 1524E z.B. 1mNm, das von 2024 für 1524T 2.87mNm. Ich habe leider auch die T Version noch nicht mit Encoder gefunden. Und mein Versuch den Encoder vom alten Motor unbeschädigt herunter zubekommen war leider nicht ganz erfolgreich. Datenblätter sind übrigens hier: https://cdn.faulhaber.com/media/DAM/Documents/Datasheets%20Portfolio%20Collection/standard-datasheets-portfolio-en.pdf Motor 1524 Seite 42 Getriebe 15/5 S 22:1 Seite 310 Viele Grüße Flo PS: Hier noch ein Foto der Rotors des defekten Motors. Leider hat sich der Neodymium Magnet aufgelöst und dabei sein Volumen deutlich vergrößert, so dass alles fest verklemmt war.
Florian R. schrieb: > PS: Hier noch ein Foto der Rotors des defekten Motors. Leider hat sich > der Neodymium Magnet aufgelöst und dabei sein Volumen deutlich > vergrößert, so dass alles fest verklemmt war. Da war die Nickelschutzschicht beschädigt. Ein kleiner Kratzer kann schon reichen.
Hallo H.H. ja, genau. Ärgerlicher Fehler, weil sicher ein Produktionsmangel, aber nach über 20 Jahren kann man sich wohl schlecht beschweren. Das Gerät ist Baujahr 2003, kaum gebraucht und stand wohl 20 Jahr nur rum. Es sind noch fünf Faulhaber Glockenankermotoren drin, die sind noch OK. Viele Grüße Flo
Respekt. Wie entsteht so ein krasses Schadensbild, ist das ein Oxidationsprozess ähnlich wie Verrosten bei normalem Metall oder was führt zur Zerstörung des Materials? Glockenankermotoren habe ich keine mehr. Bei denen ist der Rotor eisenlos (das Bild müsste Stator heißen), daher haben die Dinger kein Rastmoment. Als Halbstarker hatte ich welche, die eigneten sich extrem gut als Generator.
Angehängte Dateien:
-

encoder.jpg
160 KB -

rotor_for_real_this_time.jpg
210 KB
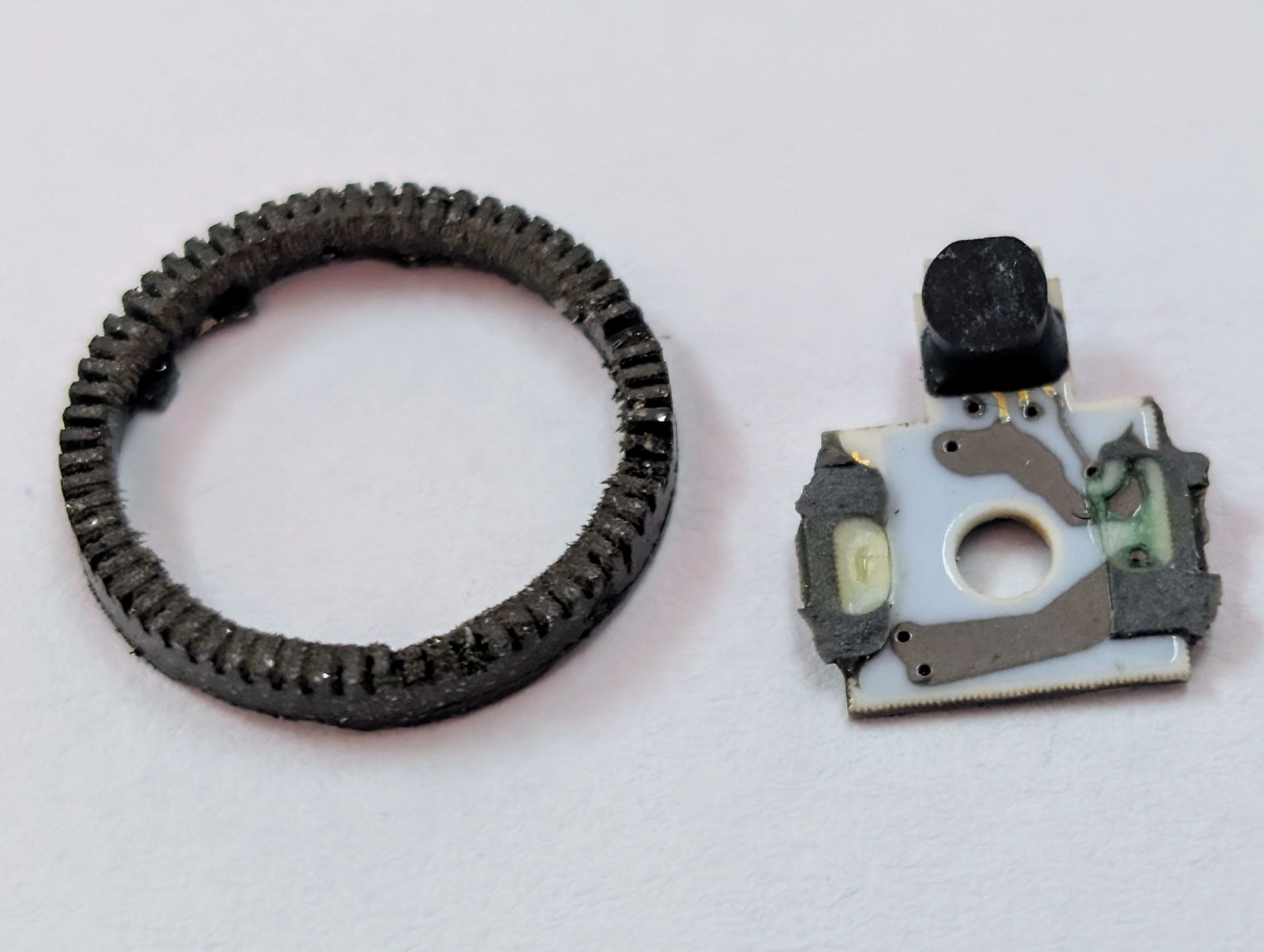
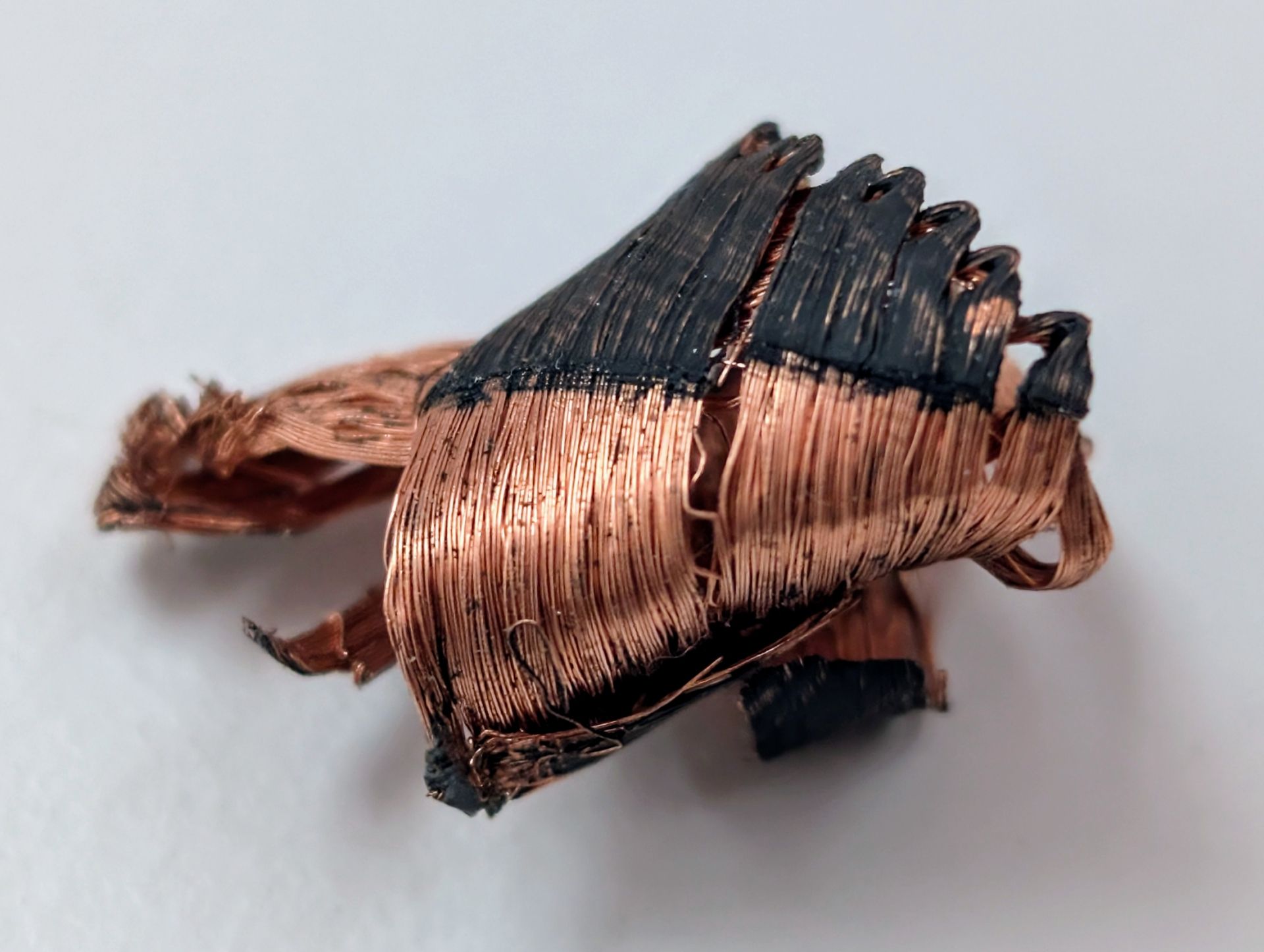
Hi Ben, du hast natürlich vollkommen recht, der Magnet im Kern ist Teil des Stators. Der Rotor besteht nur aus den Spulen, ohne irgendeinen Kern, nur mit etwas Kunstharz zusammengehalten. Beim Zerlegen ist kaum etwas von ihm übriggeblieben. Den alten Encoder habe ich übrigens fast erfolgreich herausoperiert, leider sind aber an dem gezahnten Magnetring doch ein paare Zähne abgebrochen. Die Hallsensoren wären noch OK. Der Schaden am Magnet entsteht so weit ich das verstehe durch die Reaktion des Materials mit Sauerstoff. Die Materialien dieser Neodym Magnete sind so reaktiv, dass sie an der Luft schön langsam oxidieren, dabei zerbröseln und ihr Volumen vergrößern. Verhindert wird das i.A. durch eine Schicht Nickel, die den Sauerstoff abhält. Wenn diese Schickt einen kleinen Schaden hat, ist es nur eine Frage der Zeit, bis der Magnet zerbröselt. So „schön“ wie bei diesem Exemplar ist mir das aber auch nicht untergekommen, der Magnet hier hatte aber auch über 20 Jahre Zeit zu oxidieren. Viele Grüße Flo
Das ist aber mal ein interessantes Schadensbild. Ich kannte das bislang nur von der klassischen Zinkpest. Und habe sowas bislang nur einmal bei dicken Haltemagneten einer eigentlich kommerziellen Chinesischen Bergwerkshandlampe gesehen. Das kann in der Zukunft ja dann lustig werden. Bei den Motoren kann ich Dir eigentlich auch nur empfehlen, das Internet nach Teilespendern zu durchforsten. Magst Du verraten - in was für eine Gerät das sitzt? Ich schau auch nachher noch in meinen Beständen. Dazu ist ja am Wochenende Hamradio in Friedrichshafen. Ich geh wahrscheinlich auch hin. Villeicht fällt einem dort ja sowas ins Auge. Du kannst ja mal einen Kostenrahmen ausloben (nicht dass man da Gewinn mit machen will - aber ob man Dir eventuell helfen kann durch mitbringen oder Bescheidsagen). Ich hab als Schüler vor 30 jahren immer diese Motoren aus Vermessungsgeräten auf die ich massig zugriff hatte Recycelt und zum Basteln missbraucht und bin auf deren Aussehen konditioniert, das war aber noch Encoderlos. vg Maik
Angehängte Dateien:
-

phantom_premium.jpg
310 KB -

handpiece.jpg
230 KB
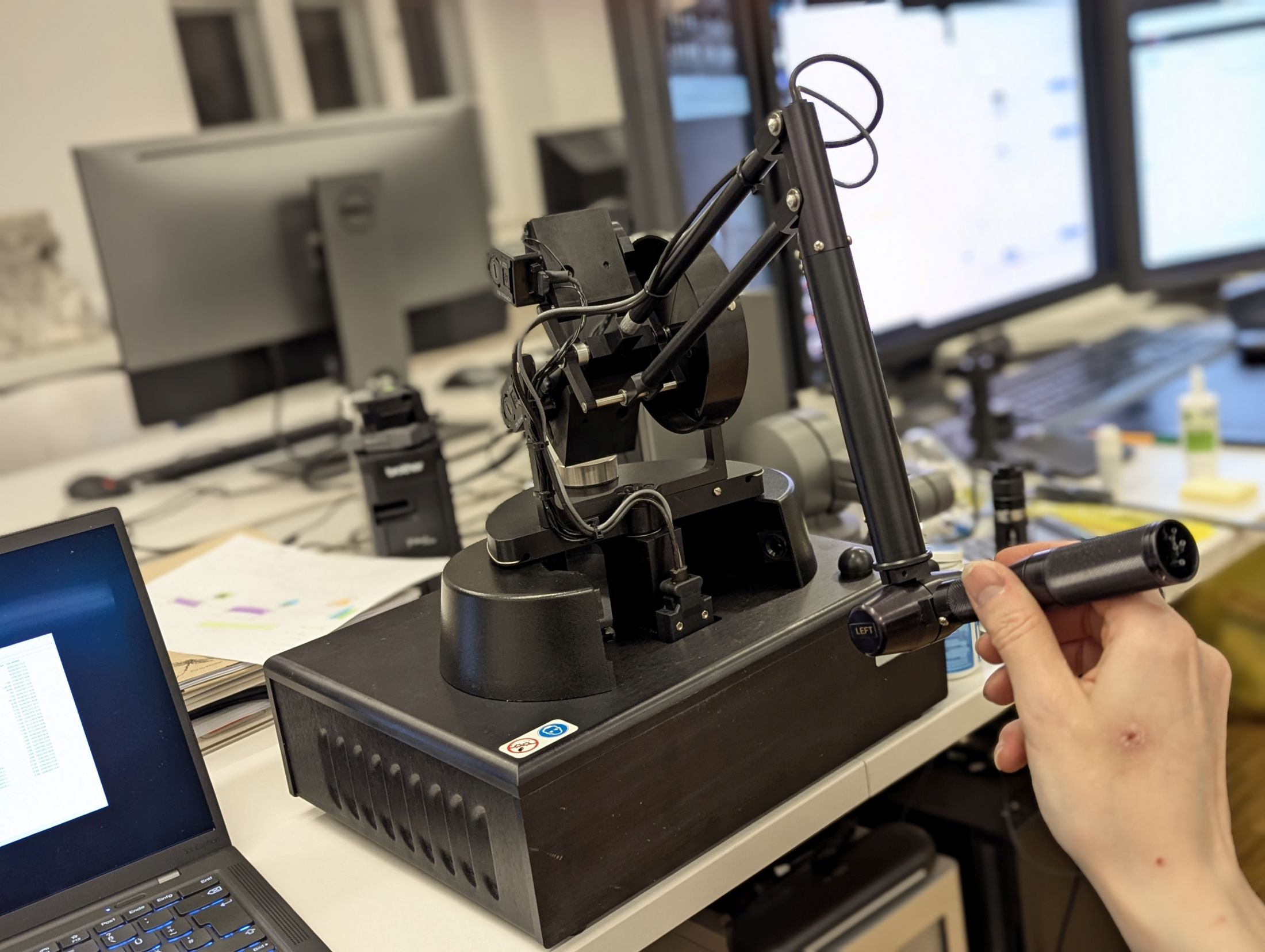
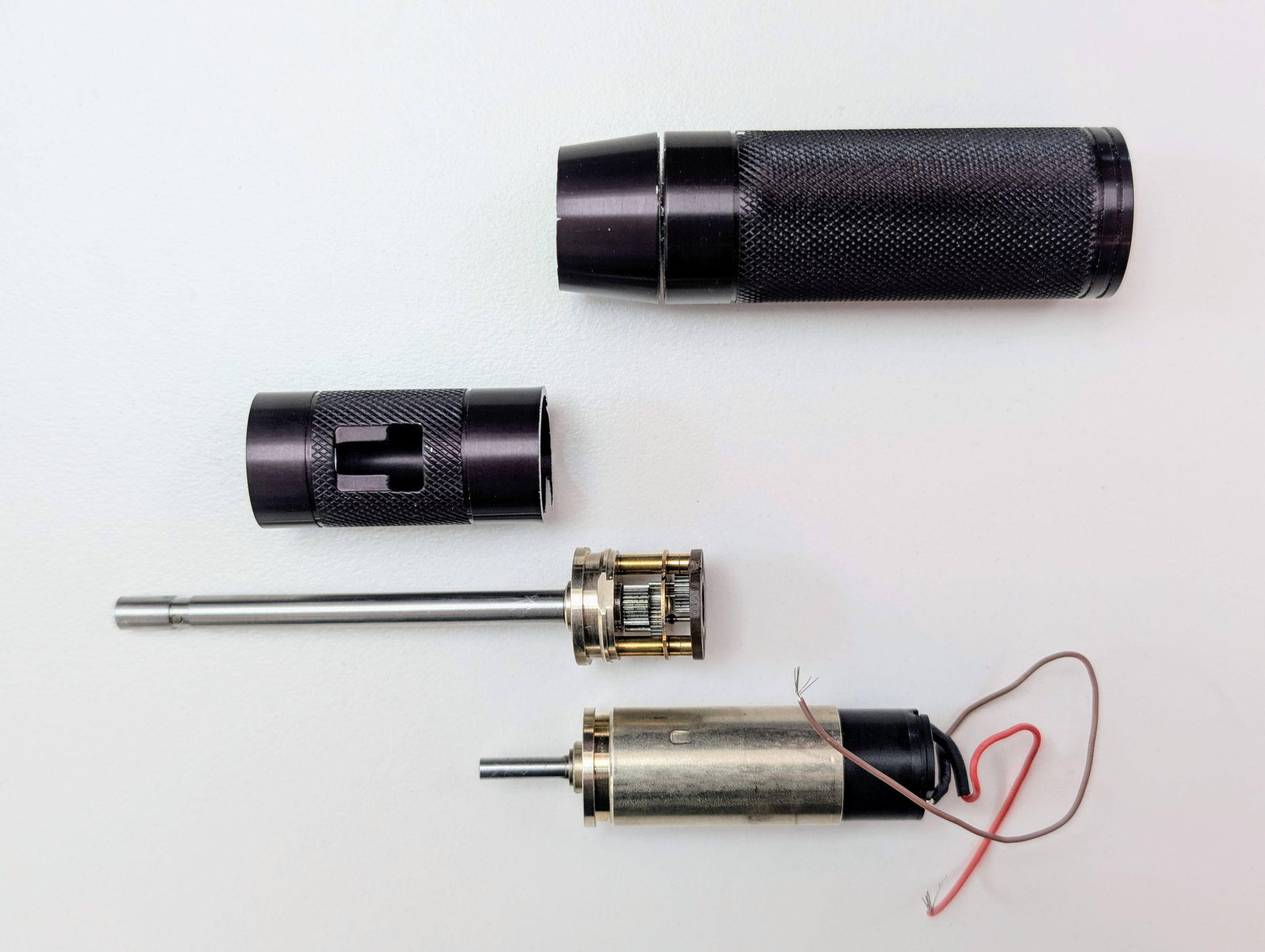
Hallo Maik, der Motor sitzt in einem Sensable Phantom Premium [1]. Das ist ein 6 DOF Haptic Input Device. Ich hab neulich ein gebrauchtes Modell in sehr gutem Zustand ergattert, alles funktioniert nur eben der letzte Motor im Handstück nicht. Der Motor kann auf den Griffel den man in der Hand hält axial ein Drehmoment aufbringen. Ich hab jetzt im Moment nur ein 5 DOF Haptic Input Device. Wobei im Moment leider nicht einmal das, weil sich der Motor auch mit Gewallt nicht drehen ließ konnte ich den Griffel nicht wie vorgesessen demontieren, weil zwei wichtige Schrauben nur in einer bestimmten Stellung zugänglich sind. Ich wusste aber natürlich nicht einmal von diesen Schrauben und hab Griffel als lauter Verzweiflung darum zersägt. Ist aber nicht so Schlimm diese Ich hab eine Drehbank und kann diese Hülse in der der Motor steckt noch anfertigen, oder irgendwie flicken. Aber da brauch ich natürlich erst den Motor. Ohne Motor könnte ich ein neues Handstück, nur mit einem Encoder bauen, dann hätte ich wenigstens 6 DOF Input aber nur 5 DOF Output. Hier noch ein Foto des zersägten Handstückes mit original 22:1 Getriebe und einem 1524E012 Motor, leider mit 485:1 Getriebe und ohne Encoder. Im fordern Teil ist eigentlich recht viel Platz, vielleicht könnte einen Encoder basteln, der auf der langen Welle sitzt. Der müsste dann ca. 11264 Pulse pro Umdrehung haben. Also ein 14 bit Encoder mit Hohlwelle und max. 16mm Außendurchmesser. Das wird es leider auch nicht an jeder Ecke geben. Viele Grüße Flo [1] https://www.3dsystems.com/haptics-devices/3d-systems-phantom-premium
Oh, sorry. Preis habe ich vergessen. Für den richtigen Motor mit Encoder und Getriebe würde ich auch gebraucht schon 100 EUR springen lassen. Ich hab inzwischen schon einen Thunderbolt to PCIe Adapter mit einer speziellen PCIe to Parallel Port Karte in das Gehäuse des alten Phantom Premium eingebaut, jetzt hat das alte Ding ein Thunderbolt Interface. :-) Da kommt es auf nochaml 100 EUR auch nicht an. Viele Grüße Flo
Florian R. schrieb: > Für den richtigen Motor mit Encoder und Getriebe würde ich auch > gebraucht schon 100 EUR springen lassen. Das wäre ein richtiges Schnäppchen.
Florian R. schrieb: > Oder hat vielleicht sogar jemand diesen Motor mit oder ohne Getriebe > abzugeben? Hast PN
Hallo
> Das wäre ein richtiges Schnäppchen.
Nja, den 1524T012SR gibts bei RS für 130 EUR, das 15/5 22:1 Getriebe bei
Lemo Solar für 80 EUR, zugegeben Encoder und Ritzel fehlen, aber man
kanns ja mal versuchen. :-)
Viele Grüße
Flo
Angehängte Dateien:
-

Faulhaber_Motor.jpg
230 KB
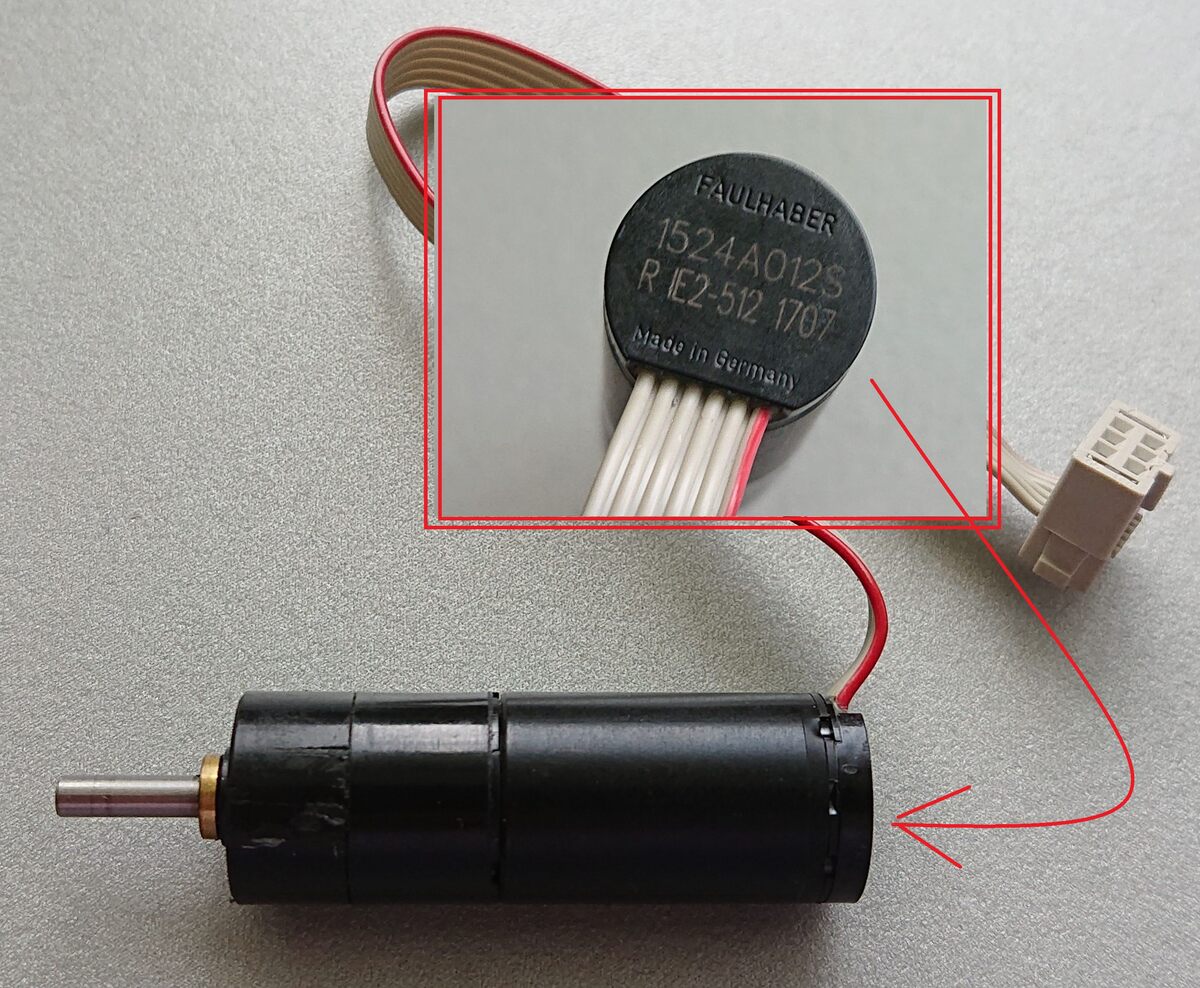
Vom 1524A.... müsste ich mehrere haben. Kann ich heute Abend mal nachschauen und dir Bescheid geben. Anbei ein Beispiel aus dem Bestand.
Ich habe grade noch einen fast passenden Motor mit Getriebe bei AliExpress entdeckt: https://de.aliexpress.com/item/1005005629188369.html 1524E018S IE2-512 15/5 22:1 Leider die 18V Version, aber richtiger Encoder und richtiges Getriebe. Viele Grüße Flo
Angehängte Dateien:
-

Faulhaber_Motoren.jpg
79 KB

Diese drei gehen morgen auf die Reise. Gruß Stoerpeak
Und wenn man Pech hat, kommen sie an wie auf "rotor for real" abgebildet.
Hi Stoerpeak, vielen vielen Dank. Das sieht sehr vielversprechend aus. Vielleicht stört ja das 28:1 statt 22:1 Getriebe nicht und wenn doch kann ich immer noch mein altes Getriebe an deinen Motor montieren. Ich werde dann in Mechanik und Werkzeug berichten wenn es Fortschritte gibt. Kann aber leicht zwei Wochen dauern, bis ich genug Zeit habe das neue Handstück zu drehen. Und dann gibt es da auch noch ein Firmware Update Projekt. Ich hab auch ein paar Phantom Desktop besorgt (die haben 6 DOF Input, aber nur 3 DOF Feedback), der mit der älteren Firmware läuft leider nicht mit meiner neueren PCIe Parallel Port Karte. Darum werde ich noch Versuchen den EPC1441PC8 mit dem Bitstream für ein EPF6016TC144-3 zu kopieren. Viele Grüße Flo
> Das wäre ein richtiges Schnäppchen. Das hab ich auch so gedacht. Ich hab als Neupreis noch so 600DM pro Stueck fuer so einen Motor, aber eine Nummer groesser, in Erinnerung. Geile Teile wenn man sich selber mal einen Akkuschrauber bauen will der besser ist wie der Billokram. .-) > der Motor sitzt in einem Sensable Phantom Premium [1]. Interessantes Teil. Damit muesste man dann auch seinen Kaffee umruehren koennen.... Ich frag mich nur gerade wie das Teil mit der Maschinenrichtlinie harmoniert. Vanye
Angehängte Dateien:
-

phantom_desktop.jpg
170 KB

Hi Vanye > Damit muesste man dann auch seinen Kaffee umruehren koennen.... Ja, sollte gehen. Vielleicht sollte ich diese Anwendung beim neu Aufbauen des Handstückes berücksichtigen, ein einfahrbarer Löffel vielleicht, ein kleiner Greifer für Teebeutel wäre auch gut. > Ich frag mich nur gerade wie das Teil mit der > Maschinenrichtlinie harmoniert. Gute Frage. Anders als der kollaborative Roboter hier, gibt es keine Redundanz, keinen unabhängigen Safety Controller, nicht einmal einen Not-Aus-Schalter, dafür aber jede Menge Möglichkeiten sich die Finger einzuzwicken. Allerdings ist die bewegliche Masse sehr kein, genau wie die erreichbaren Geschwindigkeiten und maximalen Kräfte und Drehmomente. Der Phantom Desktop sieht deutlich harmloser aus, hat aber eben nur drei Motoren um den Stylus in x, y, z-Richtung zu bewegen. Die Sensable Phantom (Desktop und Premium) sind so ca. 25 Jahre alt aber immer noch erhältlich und es gibt auch neuere Entwicklungen. Die Force Dimension Omega.3/6/7 [1] haben IMHO eine besser Kinematik (x,y,z Bewegung wird mit Delta Parallel Kinematik realisiert) und neulich gab es eine Kickstarter Kampagne einer kanadischen Firma für ein neues Consumer Gerät Namens MinVerse [2]. Insgesamt, waren und sind diese Haptic Input Devices aber eine ziemliche Nische. Das Ganze klingt nützlich, ist aber eben immer auch sehr groß, unhandlich und teuer im Vergleich zu einer Maus. Viele Grüße Flo [1] https://www.forcedimension.com/products/omega [2] https://www.kickstarter.com/projects/haplyrobotics/minverse-the-haptic-3d-mouse-for-the-digital-age
> Insgesamt, waren und sind diese Haptic Input Devices aber eine ziemliche > Nische. Was ist eigentlich diese Nische? TeachIn eines Roboterarms oder sowas? Vanye
Hi Vanye > Was ist eigentlich diese Nische? Es gab früher (< 20 Jahre) viele, naja etliche, Paper die verschiedene Anwendungen in CAD, (Character) Modeling, Games usw. untersucht haben. 'Digital Clay' was so eine Idee z.B.: [1] Yu, P., Ji, Z., Hao, A. and Gao, Y., 2025. Real-time immersive haptic sculpting with elastoplastic virtual clay. The Visual Computer, pp.1-14. [2] Liu, X., Dodds, G., McCartney, J. and Hinds, B.K., 2004. Virtual DesignWorks—designing 3D CAD models via haptic interaction. Computer-Aided Design, 36(12), pp.1129-1140. [3] Morris, D., Joshi, N. and Salisbury, K., 2004, March. Haptic battle pong: High-degree-of-freedom haptics in a multiplayer gaming environment. In Experimental gameplay workshop, GDC (Vol. 192). Bis heute gehalten haben sich medizinische Anwendungen zum Trainieren von Operationen und Steuern von Operationsrobotern, da spielt es keine Rolle, das die Geräte teuer und etwas sperrig sind. [4] Escobar-Castillejos, D., Noguez, J., Neri, L., Magana, A. and Benes, B., 2016. A review of simulators with haptic devices for medical training. Journal of medical systems, 40, pp.1-22. [5] Patel, R.V., Atashzar, S.F. and Tavakoli, M., 2022. Haptic feedback and force-based teleoperation in surgical robotics. Proceedings of the IEEE, 110(7), pp.1012-1027. Ich würde gern eine neue Idee für interaktives CAD Modeling ausprobieren und vielleicht das Ding zum Spaß mal mit einem unserer Roboter verbinden. Viele Grüße Flo [1] https://link.springer.com/article/10.1007/s00371-025-03986-7 [2] https://www.sciencedirect.com/science/article/pii/S0010448503002197 [3] https://dmorris.net/projects/haptic.battle.pong/hbp_description.pdf [4] https://dl.acm.org/doi/10.1007/s10916-016-0459-8 [5] https://ieeexplore.ieee.org/abstract/document/10551469
> Bis heute gehalten haben sich medizinische Anwendungen zum Trainieren > von Operationen und Steuern von Operationsrobotern, da spielt es keine > Rolle, das die Geräte teuer und etwas sperrig sind. Das klingt eigentlich ganz sinnvoll. Vielleicht auch noch Bonding. Zumal man per Software vielleicht auch noch Zittern etwas wegfiltern kann und in Abhaengigkeit von der Vergroesserung eine "mechanische" Untersetzung einbauen koennte. Bei CAD sehe ich das eher nicht so. Ich denke manchmal ob ich mir so eine 3Dconnexion kaufen sollte, aber eigentlich ging bisher immer alles auch so. Vanye
Hi,
ja, ich kenn mich mit den medizinischen Anwendungen nicht aus, aber ich
vermute, dass das Filtern und Skalieren wichtige Funktionen sind und
wenn der Roboter kleine Kräfte mist, kann man die verstärken und an den
Bediener zurückmelden.
> Ich denke manchmal ob ich mir so eine 3Dconnexion kaufen sollte,
Das kann ich uneingeschränkt empfehlen (ich nutze sie mit vor allem mit
Rhino, Blender und SolidWorks). Die sind zwar inzwischen sauteuer, aber
wirklich sehr praktisch. Allerdings muss man mit einer gewissen
Lernphase rechnen. Und nimm das Ding am Anfang nie mit deiner dominanten
Hand, das ist dann zwar viel einfacher als mit der nicht-dominanten,
aber die SpaceMouse ist nur sinnvoll, wenn man die normale Maus mit der
einen Hand bedient und die SpaceMouse mit der andere. Dann kann man z.B.
mit der einen Hand das Objekt drehen und gleichzeitig mit der anderen
z.B. Vertices oder Faces markieren oder andere Edits machen.
Viele Grüße
Flo
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.