Hallo, ich bin 15 Jahre alt und benötige möglichst präzises Objekt tracking. Es geht darum, dass ein Fahrzeug automatisch, möglichst präzise neben einer Person fahren kann. Daher dachte ich an eine Lösung, wo zwei IR Sender an der Person angebracht werden, welche dann mittels 2 IR Richtungssensoren und Triangulation abwechselnd getrackt werden. Die Richtungssensoren müssen entsprechend präzise sein und, da es keine passende Lösung zu kaufen gibt ist mein Plan eine Reihe von Sensoren in einem Halbkreis anzuorden, welche IR Intensität messen können. Daher kann man die Richtung der IR Quelle ermitteln. Die Sensoren sollen Intensität und nicht nur Ob das Signal vorhanden ist messen können, damit man interpolieren kann, wo das signal herkommt. Ich bin mir nicht sicher, ob dieses Konzept funktionieren kann und habe leider noch keinen Sensor gefunden, welcher NUR IR Intensität misst. Herkömmliche Photowiederstände werden durch Umgebungslicht gestört. Vielleicht hat ja jemand eine Idee, welche Art Sensor man Benutzen Kann. Vielen Dank Henry
:
Bearbeitet durch User
Hadmut F. schrieb: > Eine ESP32-Cam mit herausoperiertem IR filter? Ja, und dann aber ein Tageslichtfilter draufgeklebt. Ich meine diese tief-dunkelroten Filterscheiben die vor manchen Fernbedienungsempfängern montiert sind. Sowas gibt es auch als Klebefolie zu kaufen (-> Aliexpress). Was die Kamera angeht: die sollte vor allem eine hohe Bildwiderholfrequenz haben. Denn Du willst das IR-Signal modulieren. IR-Fernbedienungen machen das mit 36 bis 50 kHz. Die wollen aber nur Empfangen und brauchen keine genaue Senderposition. Du willst nur die verschiedenen Sender unterscheiden, und viel wichtiger, von Störquellen unterscheiden. Da ist eine Modulation der Signale sehr hilfreich und desto schneller du die machen kannst, desto sicherer ist Deine Positionsinformation.
Hallo, Ich habe mich eher an IR Seekern für Robocup soccer orientiert. Ich denke, dass ein Aufbau mit einem Sensorring zuverlässiger ist. Außerdem würde eine Kamera wahrscheinlich nicht die benötigten 180 grad abdecken. Ich werde die Option aber auf jeden Fall im Hinterkopf behalten.
:
Bearbeitet durch User
Angehängte Dateien:
-

sensors-20-02163-g001.png
410 KB -

Clipboard01.jpg
26 KB -

Clipboard01.jpg
20 KB
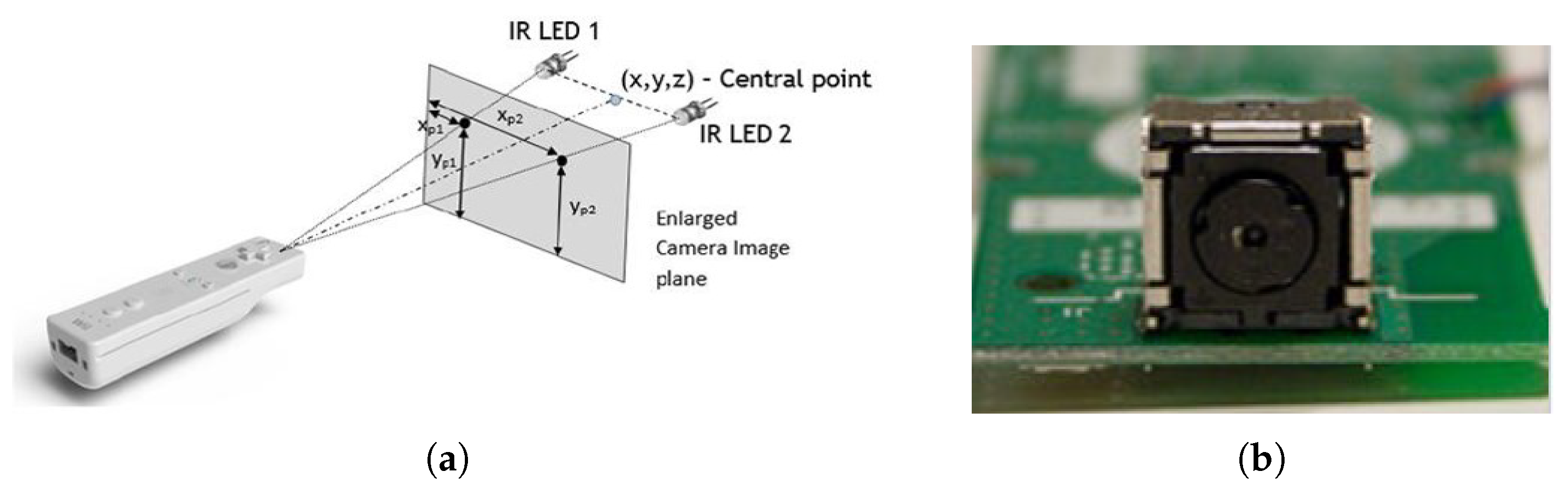


Wenn du dir das alte nintendo WII handteil anschaust, das läuft mit dem 2-dioden IR sender auf dem TV genau so. Dein IR sensor ring ist dazu viel zu grob quantisiert. Gerd E. schrieb: > Ich meine diese > tief-dunkelroten Filterscheiben Gibts für den esp32 eigentlich auch schwarzweiss kameras ? Heisst "night vision" kein IR filter? Fischaugen mit fast 180 grad gibts.
:
Bearbeitet durch User
Gerd E. schrieb: > Da ist eine Modulation der Signale sehr hilfreich und desto schneller du > die machen kannst, desto sicherer ist Deine Positionsinformation. Den Zusammenhang erkläre doch bitte einmal. Wenn man den IR-Sender gemütlich (z.B. 1/3 Bildfrequenz der Kamera) ein- und ausschaltet, bekäme man u.a. abwechselnd immer einen Frame mit der Hintergrundhelligkeit und einen mit voll aktiver IR-LED, so dass im Differenzbildes die IR-Bake klar erkennbar ist. Wie schnell möchtest du modulieren und warum wird die Positionsinformation dadurch genauer? Meinst du Bewegungsunschärfe?
:
Bearbeitet durch User
Henry schrieb: > Daher dachte ich an eine Lösung, > wo zwei IR Sender an der Person angebracht werden Wie bei der Wii Remote? Ansonsten gibt es LIDAR oder Sensoren von Sick, die ein "an der Person angebracht" ersparen. So ein Projekt lief bei uns an der FH erfolgreich.
Rainer W. schrieb: > Den Zusammenhang erkläre doch bitte einmal. Wenn man den IR-Sender > gemütlich (z.B. 1/3 Bildfrequenz der Kamera) ein- und ausschaltet, > bekäme man u.a. abwechselnd immer einen Frame mit der > Hintergrundhelligkeit und einen mit voll aktiver IR-LED, so dass im > Differenzbildes die IR-Bake klar erkennbar ist. Dann brauchst Du aber eine exakte Synchronisation zwischen Kamera und IR-LED. Kameras haben dazu meist einen Rolling Shutter und kein Global Shutter. Es gibt also nicht einen exakten Aufnahmemoment, sondern der Variiert mit der Position des Objekts. Und die kennst Du nicht. Wenn die Kamera meinetwegen 120 Hz macht, Du aber nur mit z.B. 25 Hz modulierst, dann spielt das keine Rolle weil die Kamera wesentlich schneller ist als die Modulation. Wenn die Kamera aber z.B. nur 10 Hz kann, dann muss Deine Modulation sehr viel langsamer sein (oder eben exakt synchronisiert, siehe oben). > Wie schnell möchtest du modulieren und warum wird die > Positionsinformation dadurch genauer? Meinst du Bewegungsunschärfe? Ja genau. Wenn Du meinetwegen mit lockeren 3 m/s joggst und die Kamera das einigermaßen sauber erfassen können soll, willst Du nicht mit 1 Hz modulieren. Denn dann bist Du schon 3 Meter weiter. Wenn Du das durch starke Interpolierung kompensierst, bist Du stehen geblieben oder abgebogen, die Kamera-Logik denkt aber Du bist schon 5 Meter weiter. Das kriegst Du nur durch schnellere Datenerfassung und schnellere Modulation in Griff.
:
Bearbeitet durch User
Gerd E. schrieb: > Dann brauchst Du aber eine exakte Synchronisation zwischen Kamera und > IR-LED. Nein. Wenn das Blinken deutlich langsamer als die Framerate ist, sind abwechselnd immer Frames mit vollständig dunkler und vollständig leuchtender LED dabei. Die kann sich die Software selber raussuchen und die Frames mit nicht stabilem LED-Zustand verwerfen. Das funktioniert ganz ohne Synchronisation, auch wenn die Zeitauflösung etwas darunter leidet. Bei Blinkfrequenz ≤ 1/4 Framerate funktioniert das sogar unabhängig von der Belichtungszeit. Für eine sichere Identifikation der blinkenden Lichtquelle ist es aber gar nicht nötig, so langsam zu blinken, dass die LED in einem Frame ganz an und in einem der folgenden ganz aus ist. Da muss nur der Kontrast hoch genug sein. Wie kritisch das zeitlich ist, hängt sicher von der Dynamik der Szene ab. Da hast du wohl Recht.
:
Bearbeitet durch User
Für die Positionierung und Auslesen des Laserstrahles eines CD-Laufwerks gab es Photodioden mit ein paar Feldern, wenn der Laser aus den Zentrum wich wurde dann nachfokussiert. So viel Kamera braucht man womöglich nicht, der Lichtsensor einer optischen Maus hat auch nicht soviel Pixel. ich nehme an, ein Segway soll neben her rollen, daß man endlich mal ein paar Schritte tun darf, oder so. Helfen kann ich nix, wegen keine Ahnung. Es gibt auch Spurhalteassistenten für Mähdrescher, so kompliziert ist das auch nicht.
:
Bearbeitet durch User
Carypt C. schrieb: > Es gibt auch Spurhalteassistenten für Mähdrescher, so kompliziert ist > das auch nicht. Rover und zu verfolgenden Person könnten ja einen RTK-Empfänger mitführen und auf einem Funkkanal die aktuelle Position kommunizieren ;-) Die Genauigkeit von 1..2 cm könnte vielleicht reichen. Mit IR-Tracking, um das es hier geht, hätte das dann allerdings nichts zu tun.
:
Bearbeitet durch User
Ja, ich kann hier eigentlich nicht mitreden. Der Mähdrescher hat auch bloß nach vorn geschienen und aus der Reflektion von Boden oder Getreide den Kurs berichtigt, immer an der Wand lang. Aus der Laufzeit von Schall lassen sich viel einfacher Entfernungen ableiten.
Carypt C. schrieb: > So viel Kamera braucht man womöglich > nicht Die sache ist eine esp32 kamera kostet $3, während deine 3-pixel kamera im retail unter $30 kaum geht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.