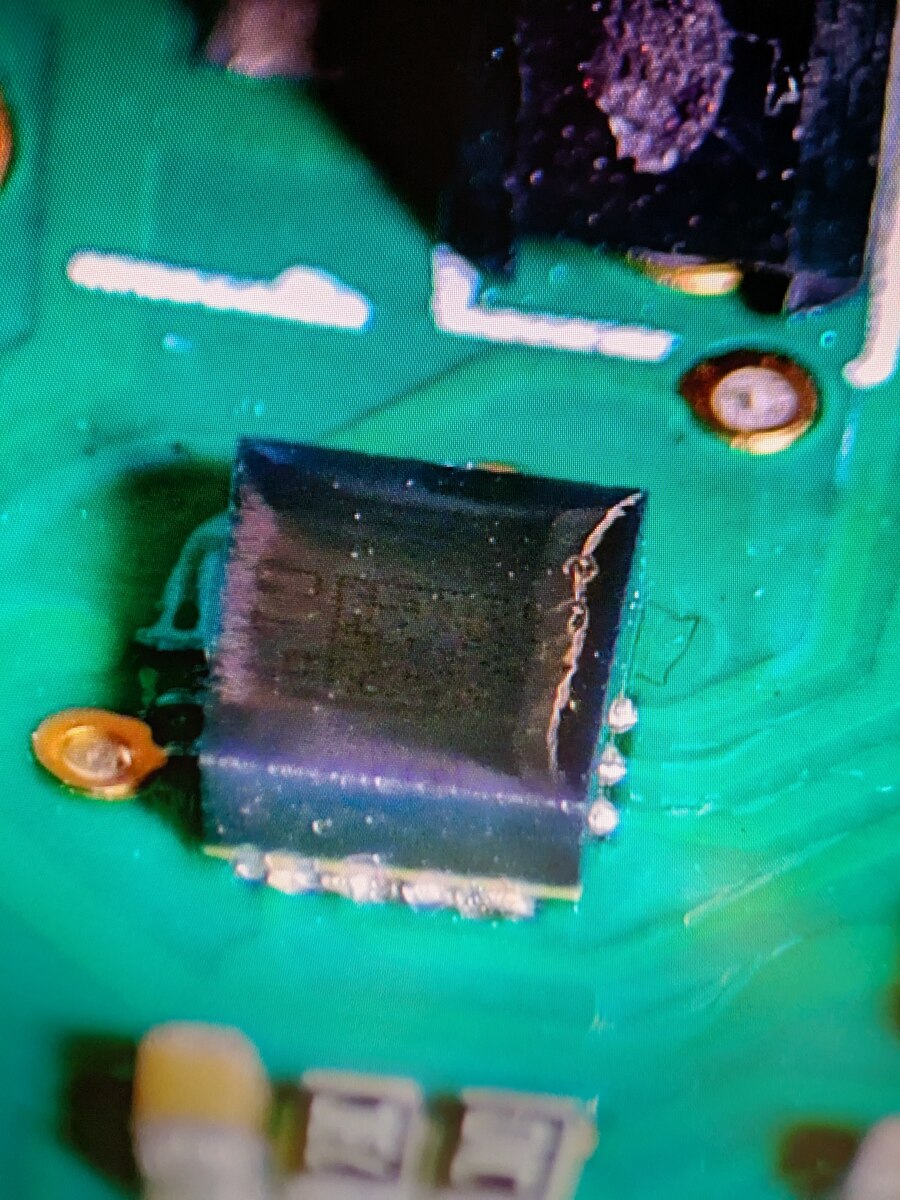
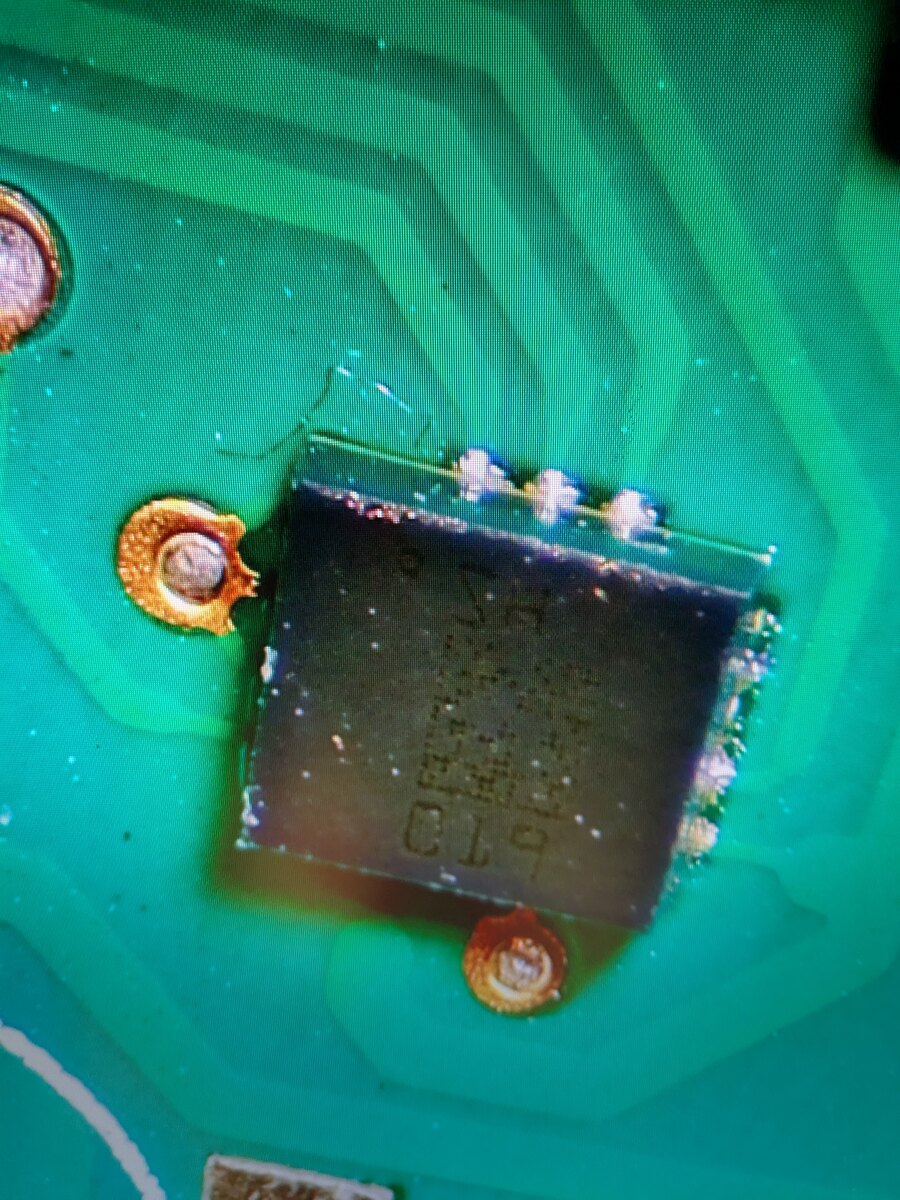
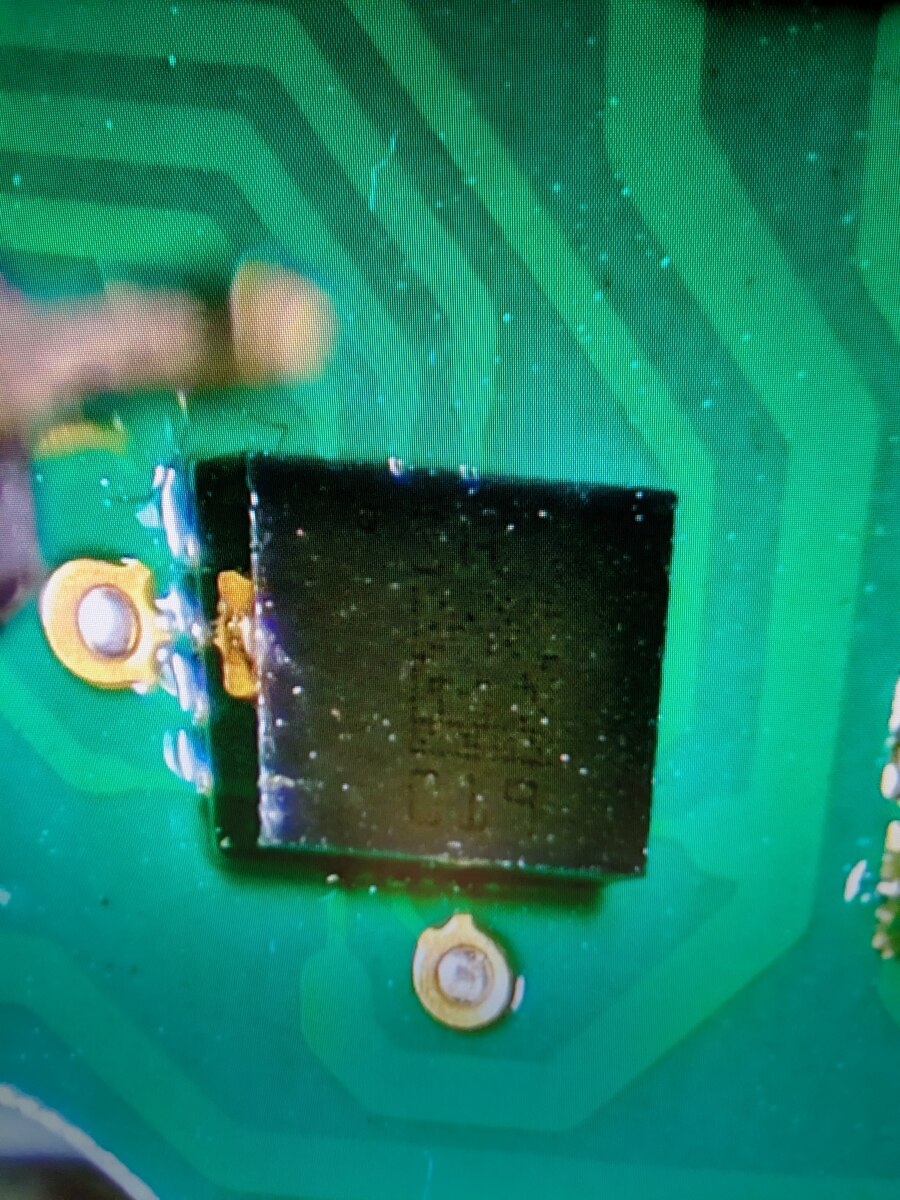
TLDR: Kann mit der Bezeichnung "SH 019" oder "610 H2" (je nachdem wie rum man es liest) nichts finden. Der IC is 2x3mm. Jemand ne Ahnung? Vermute Beschleunigungssensor, aber keine Ahnung. Habe hier einen Poolroboter auf meinem Basteltisch, der scheinbar defekt sein soll (weil er sich nicht mehr bewegt haben soll). Da er aber die einzigen beide Motoren (Propelleransaugturbinenmotor und Antriebsmotor) nach Start des Reinigungsprogramms noch ansteuert, denke ich er ist noch i. O.. Eventuell war Wackelkontakt das Problem. Laut Anleitung fährt das Ding am Poolboden / Poolwand rum und bürstet bei der Fortbewegung den Boden ab und saugt Schmutz in ein Fangsieb. Es gibt zwei Reinigungsprogramme, die man mit der externen über Kabel verbundenen Steuereinheit auswählen kann: A Nur Boden B Boden und Poolwand (und Wasseroberfläche). Das Reinigungsprogramm dauert scheinbar 1,5h und er fährt vermutlich chaotisch im Pool herum. Außerdem gibt es noch die Einstellmöglichkeit SCS wie weit er beim Wand hochfahren aus dem Wasser rausfahren soll (über die Wasserlinie) um dann an der Wasserlinie Schmutz einzusaugen. Für das Aufsteigen an der Wand vermute ich, dass er durch die Ansaugturbine (30VDC Gleichstrommotor, ca. 1,5A unter Wasser) sich an die Wand ansaugt und dadurch die nötige Traktion erhält. Für Vortrieb ist ein 24VDC Getriebemotor zuständig. Allerdings habe ich (aufgrund fehlendem Pool) nicht feststellen können, dass er während des Reinigungsvorgangs für mich erklärbare Aktionen ausführt und hab mir die recht kleine Platine des Roboters mal angeschaut. Außer - Mikrocontroller PIC (Kommunikation mit externer Steuereinheit, Ansteuerung Motoren, eventuell noch Auswertung eines Sensors [möglicherweise unbekannter IC] und Motorstrom) - der Leistungsstufe der beiden Motoren (4x FET für H-Brücke für Antrieb, 1x FET für Propeller) - Hühnerfutter, - 2x LM358 (unbekannte Funktion, eventuell Motorstrom) und - Spannungsregler LM317 ist die Platine recht leer und nur noch der unbekannte IC drauf. Ich frage mich, wie er nun bei Auswahl des jeweiligen Reinigungsprogramms feststellt ob/wann er die Wandkante erreicht hat und ob er gerade daran hochfährt und die Wasserkante erreicht hat. Ich vermute, dass der unbekannt IC ein Beschleunigungssensor ist bzw. er über den Strombezug (Antrieb/Propeller) irgendwas feststellt. Nach Starten des Programms fängt z. B. erstmal der Propeller an zu drehen und wenn der Strombezug nicht ausreichend hoch ist, stoppt das Reinigungsprogramm mit einer Fehleranzeige. Kippen der Platine brachte jedenfalls keine eindeutige deterministische, im Moment des Kippens erfolgende Reaktion hervor. Allerdings meine ich, dass der Standardablauf des Programms teilweise unterbrochen wird und Vortriebsphasen kürzer / länger sind. Hat jemand Ahnung von Poolrobotern? Anleitung: https://asset.productmarketingcloud.com/api/assetstorage/3096_5834bb04-ba83-412e-b67d-4194dc422ec6
Angehängte Dateien:
-

PXL_20250731_012401973.jpg
230 KB -

PXL_20250731_012727171.jpg
240 KB -

PXL_20250731_013017524.jpg
240 KB
Klaus F. schrieb: > Statt 3 mieser Bilder solltest du EIN ordentliches machen. Waren die besten, die ich mit meinen Möglichkeiten und angesichts des Conformal Coating hinbekommen habe. Sorry.
Was auch immer das ist, das ist kein normales IC, die Bauform lässt irgendein Hybridmodul oder sowas in der Art annehmen.
Dachte an irgendein QFN oder TQFN. Ich gehe mal von ca. 1mm Höhe aus. Auf der kurzen Seite scheint es 4 Anschlüsse, auf der langen 3 Anschlüsse zu haben. Die Vias sind mit GND verbunden.
Timo N. schrieb: > Dachte an irgendein QFN oder TQFN. Nee, bei denen kann man nicht unter der Vergussmasse eine dünne Platine sehen. Und für die paar Anschlüsse ist es zu groß (Größe kann man anhand der Widerstände auf dem ersten Bild vage erahnen). Das ist keine Standardbauform.
Harald K. schrieb: > Größe kann man anhand der > Widerstände auf dem ersten Bild vage erahnen). Wie geschrieben. Ca. 2mm x 3mm. Mit Messschieber gemessen.
Hatte ich auch gerade auf dem Bastelltisch, wenn der Motor vom Propeller kurzeitig läuft und dann eine Fehlermeldung kommt, ist das Normal. Der Roboter funktioniert nicht am Land sondern nur unter Wasser. Er versucht mit dem Propeller anzufahren und registriert die Bewegung. Wenn er die Bewegung nicht "spürt" gibt er halt die Fehlermeldung. Achso, das Ding draussen mit Hand zu bewegen hat nicht geklappt, der lief wirklich erst in seinem Element.
Nachtrag: der häufigste Defekt ist ein Kabelbruch / Schaden, bevorzugt an der Kabeleinführung beim Roboter. Die verknoten die Kabel bei ihrer Putzzerrei recht heftig.
Frank D. schrieb: > Der > Roboter funktioniert nicht am Land sondern nur unter Wasser. Hab ich auch festgestellt. Im Leerlauf an Land zieht der Propeller so 0,5A. Unter Wasser ca. 1,4A. Dann kommt auch keine Fehlermeldung. Hatte ihn für 1,5h an der elektronischen Last im Labortest. Da fährt er dann simuliert hin und her. Allerdings verstehe ich das Verhalten trotzdem nicht: Verhalten bei simuliertem Nasstest (Propeller unter Wasser zieht 1300-1400mA (getestet). Wird simuliert mit 1400mA Dauerstrom über elektronische Last): 1) Nach Start fängt der Propeller an zu drehen (nur 1-2 Sekunden). Der Propellermotor zieht ca. 1400mA Strom. Stoppt dann wieder. Beschleunigung/Verzögerung des Propeller jeweils mit Rampe. 2) Dann fängt Vortrieb kurz an (1-2s, Drehrichtung im Uhrzeigersinn (CW) [mit Sicht von von außen auf die Motorachse] und stoppt danach wieder. 3) Dann setzt der Vortrieb in die andere Richtung ein für ca. 21s ( DR: CCW, normal Geschwindigkeit), wird ab diesem Zeitpunkt für 2s etwas langsamer ohne zu stoppen (in dieser Zeit setzt Propeller kurz wieder ein) um dann nach insgesamt 23 Sekunden für weitere 12-13s mit noch schnellerer Geschwindigkeit zu drehen (bis Sekunde 36). Dann wird für 2-3s verzögert und ganz angehalten. In diesen 2-3s setzt der Propeller wieder kurz ein. Dieser Schritt 3 dauert also insgesamt (21+2+12+3) ca. 38-40 Sekunden. 4) Dann kommen 5s Pause Dann wird Schritt 3) in die andere Richtung wiederholt und dann kommt wieder Schritt 4) usw. Jeweils mit Drehrichtungswechsel. Ich vermute für ca. 1 1/2h werden diese beiden Schritte wiederholt. Nur in den kurzen Phasen (Sekunde 21 bis 23 und 36 bis 39) von Schritt 3) ist der Propeller überhaupt an. Jedenfalls im Simulationstest an Land mit immer still liegender Platine (allerdings nicht optimal waagerecht). Ob der Test mit Programm 1 (Boden) oder 2 (Boden und Wand) gemacht wird spielt keine Rolle. Eigentlich dürfte er so auch keine Wand hochkommen. Es muss also irgendein anderer Sensor noch etwas feststellen. Meine Vermutung ist, dass der unbekannte IC ein Beschleunigungssensor ist, der die Orientierung des Roboters misst um so festzustellen, dass er an den Rand gestoßen ist bzw. nun vom Boden die Wand hoch fährt. Ich vermute nicht, dass das Fahrprogramm von der externen Steuereinheit kommt, sondern auf dem µC des Roboters einprogrammiert ist. Das muss ich aber noch untersuchen.
Der IC ist ein Bewegungssensor, bei meinen war die Typbezeichnung lesbar und es gab auch ein Datenblatt, habe mir den Typ aber nicht gemerkt.
Timo N. schrieb: > Ich vermute nicht, dass das Fahrprogramm von der externen Steuereinheit > kommt, sondern auf dem µC des Roboters einprogrammiert ist. Das muss ich > aber noch untersuchen. Yepp, über das Kabel gehen +- und eine Datenleitung. Prüf mal das Kabel mit einem Durchgangsprüfer und bewege mal dabei das Kabel an der Einführung. War hier schon der zweite Robbi mit Kabelschaden.
Hab mich mal durch die Chronik des PC gekämpft, so einer war dort verbaut: LIS302DL
Timo N. schrieb: > Verhalten bei simuliertem Nasstest Er versucht sich in Gang zu bringen. Da aber keine passende Bewegung stattfindet, stoppt er wieder.
Frank D. schrieb: > Yepp, über das Kabel gehen +- und eine Datenleitung. Prüf mal das Kabel > mit einem Durchgangsprüfer und bewege mal dabei das Kabel an der > Einführung. > War hier schon der zweite Robbi mit Kabelschaden. Hey, danke. Also Kabelschaden glaube ich fast nicht mehr. Eher ein vorübergehendes Kontaktproblem am Stecker bei der Einführung in den Motorblock (wie du ja schon geschrieben hast). Aber das weiß man ja nie und muss dazu das ganze ein paar mal bewegen um zu schauen, ob es wieder kommt. Aufgefallen ist es mir aber bis jetzt nicht mehr, obwohl ich aktuell die Schrauben der Steckverbindung gelöst habe und es zum Testen aktuell nur lose aufgesteckt habe ohne festzuschrauben. Eigentlich ist es ja auch so, dass das Gehäuse eine Art Kupplung zwischen dem inneren Stecker (Kabel von Kupplung im Motorblock bis zur Platine) und äußerem Stecker (Kabel bis zur Steuerbox) darstellt. Die Pins / männlichen Kontakte sind jeweils in dieser Kupplung. Sieht eigentlich solide aus. Mit welchem Typen von Robotern hattest du zu tun? Auch Zodiac RC4400? Frank D. schrieb: > Hab mich mal durch die Chronik des PC gekämpft, so einer war dort > verbaut: LIS302DL Hey vielen Dank. Laut Datenblatt vom Gehäuse her aber scheinbar ein anderer IC. Und laut Revision im Datenblatt schätz ich auch ein etwas älteres Modell? Wobei meiner ja auch nicht der Neuste ist. Aber zumindest habe ich Bestätigung, dass es ein Beschleunigungssensor sein muss. Überrascht bin ich, dass das Teil bzw. der Motorblock gut dicht war. Auch durch die Motorwelle scheint keine Feuchtigkeit eingedrungen zu sein. Scheint eine gute Wellendichtung zu haben. Die 1,5m Wassersäule scheint ihm jedenfalls nichts angetan zu haben.
Michael B. schrieb: > Er versucht sich in Gang zu bringen. Da aber keine passende Bewegung > stattfindet, stoppt er wieder. Du meinst, dass er "das Bewegungsprofil" einer Kante an der Wand (Übergang Boden -> Wand) nicht im Bewegungssensor erkennt? Mhm. Dachte eben das kann ich durch kippen der Platine simulieren. Scheine aber dafür nicht das richtige Bewegungsprofil hinzubekommen. Naja, denke der Bewegungssensor sollte noch funktionieren. Da der Bewegungsablauf nun grundsätzlich stattfindet, was er laut Fehlerbeschreibung vorher überhaupt nicht tat (bewegte sich gar nicht), sollte er noch funktionieren. Jetzt brauch ich noch den passenden Pool dazu.
:
Bearbeitet durch User
Timo N. schrieb: > Michael B. schrieb: >> Badewanne. > > Bin so arm. Hab noch nicht mal das. https://www.moderne-hausfrau.de/p/viva-domo-faltbare-badewanne-premium-6688993/
H. H. schrieb: > Timo N. schrieb: >> Michael B. schrieb: >>> Badewanne. >> >> Bin so arm. Hab noch nicht mal das. > > https://www.moderne-hausfrau.de/p/viva-domo-faltbare-badewanne-premium-6688993/ Wo Du Dich überall auskennst! 😉
H. H. schrieb: > Timo N. schrieb: >> Michael B. schrieb: >>> Badewanne. >> >> Bin so arm. Hab noch nicht mal das. > > https://www.moderne-hausfrau.de/p/viva-domo-faltbare-badewanne-premium-6688993/ Fassungsvermögen: 200 l Belastbar bis: 210 kg Hm.... Hoffentlich ohne Wasserinhalt gerechnet.
Timo N. schrieb: > H. H. schrieb: >> Timo N. schrieb: >>> Michael B. schrieb: >>>> Badewanne. >>> >>> Bin so arm. Hab noch nicht mal das. >> >> https://www.moderne-hausfrau.de/p/viva-domo-faltbare-badewanne-premium-6688993/ > > Fassungsvermögen: 200 l > Belastbar bis: 210 kg > > Hm.... Hoffentlich ohne Wasserinhalt gerechnet. Da denk nochmal drüber nach.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.