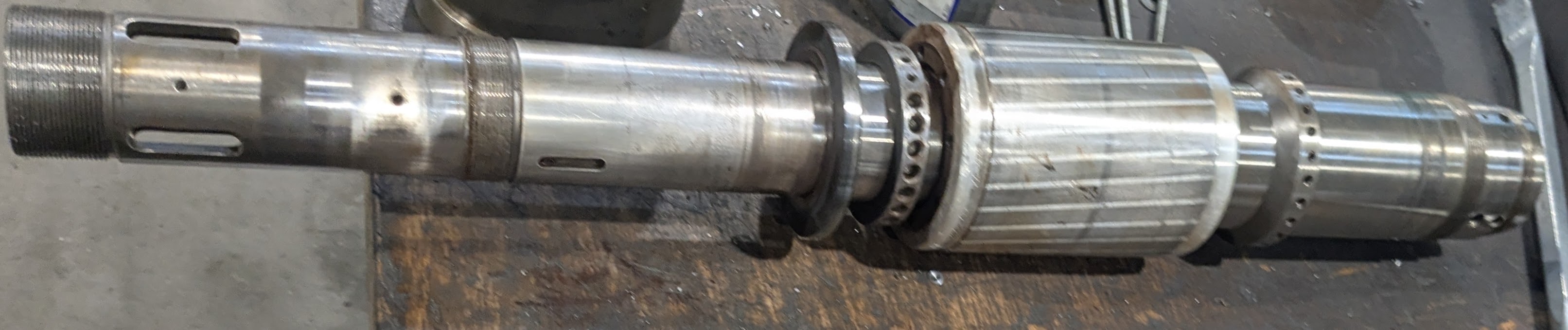
Hallo zusammen, ich hab das mal eine Verständnisfrage zu einer Asynchronmaschine: Ich hab vor kurzem an einer Drehmaschine die Gegenspindellager gewechselt und dazu natürlich die Welle und Läufer ausgebebaut. Zu meiner Überraschung ist war es ein 'normaler' Kurzschlussläufer / Asynchronmotor. Ich kann die Spindel jedoch in einen Positioniermodus versetzten und dabei eine feste Lage programmieren um z.B. Flächen ans Werkstück zu fräsen oder radiale Bohrungen zu machen. Das Gebersystem ist recht rudimentär, ein Geberrad mit geschätzten 250 Teilungen und einer Nullmarke. Wie geht das technisch? Meinem Verständnis nach ist doch ein Schlupf zwischen Wellendrehzahl und Felddrehzahl nötig, um Moment aufzubauen. Die Spindel hat ordentlich Haltemoment, sonst würden sich die Werkstücke ja bei der Bearbeiten wegdrehen. Was für eine Pulsform gibt die Antriebselektronik aus, damit die Spindel die Position hält? Schöne Grüße, Marco
Angehängte Dateien:
:
Verschoben durch Moderator
Marco F. schrieb: > Meinem Verständnis nach ist doch ein Schlupf > zwischen Wellendrehzahl und Felddrehzahl nötig, um Moment aufzubauen. Andersrum! Der Schlupf ergibt sich automatisch. Damit der Motor auf einem Punkt stehen bleibt, auch bei Störkräften, wird die Drehrichtung des Feldes häufig gewechselt.
Ich kenne das so, daß bei CNC-Drehmaschinen mit Indexierung der Drehachse ein Encoder mitläuft, so daß z.B. beim Gewinde drehen die Achsantriebe darauf synchronisiert werden können. Wenn man eine feste Arbeitsposition haben wollte (etwa für Bearbeitungen mit dem Fräskopf) wurde bei besagtem Bearbeitungszentrum ein langsam drehender Servoantrieb in ein Zahnrad auf der Drehachse eingeschwenkt, der die Positionierung und Blockierung der Drehachse erledigt hat. Der Drehantrieb wurde dazu nicht benutzt. Ansonsten - wenn man das alles allein mit der Asynchronmaschine machen möchte, dann muss man sich halt nach dem Encoder richten und bei Abweichungen ausreichend schnell gegenregeln, damit der Rotor da bleibt wo man ihn haben möchte.
Gibt es eventuell noch eine zusätzliche mechanische Bremse?
Für Drehmaschinen kann ich das nicht sagen, aber für Fahrzeuge (Stapler). Die haben mittlerweile eine sehr hohe Frequenz und dadurch, incl. Getriebe, steht der Motor vermeintlich auf der Stelle. Vor den neusten Fahrzeugen rollten die noch mit der zeit mal so bis 20cm weg, wenn die an der Schräge ohne Bremse standen. Gut, heute haben die zum größten Teil eine automatische Bremse. Aber selbst ohne, wenn du dann eine halbe Stunde später kommst, ist der vielleicht 2-3 Zentimeter weggerollt. Vorher wäre das bis zu einem halben Meter gewesen.
Mit FU und feldorientierter Regelung bekommt man es schon hin eine Asynchronmaschine bei vollem Moment im Stillstand und auf Position zu halten. Habe ich bis 500kW für Hebezeuge realisiert. Bei Änderung des Lastmomentes wird es aber trotzdem zu einer leichten Bewegung kommen die dann wieder ausgeregelt werden muß. Ob das bei einer Bearbeitungsmaschine tolerierbar ist kann ich nicht einschätzen. Wie schon ein Vorredner meinte: Sicher, daß da nicht noch eine Bremse verbaut ist?
Jörg K. schrieb: > Wie schon ein Vorredner meinte: Sicher, daß da nicht noch eine Bremse > verbaut ist? Gehe ich auch von aus und deshalb erwähnte ich die elektrische Bremse.
Nabend, schonmal danke für die Antworten. - Eine Bremse ist definitiv nicht verbaut, wie im Foto zu sehen hatte ich die ganze Spindelwelle ausgebaut, ich hab ja alle Lager tauschen müssen. So kenne ich das eigentlich auch, entweder Bremse, Umschaltung auf Schneckenwelle, Synchronmotor oder eine Kombination daraus. Vielleicht unterschätze ich die Encoderauflösung, aber ich würde mal die zulässige Winkelabweichung auch kleiner 0,025° schätzen. Der Encoder müsste also sehr hoch interpolieren. Ich versuche mal noch mehr Infos zum Encoder herauszubekommen. Schöne Grüße, Marco
Hallo, ich schulde euch noch die Aufklärung: Ich war noch mal vor Ort und hab den Encodertyp herausbekommen und siehe da, der hat 360.000 Pulse pro Umdrehung! Im Sensor muss somit eine Interpolation stattfinden und mit der hohen Auflösung kann der VFD die Positionsabweichung ausregelen. Schöne Grüße, Marco
Marco F. schrieb: > den Encodertyp Würde mich interessieren, welcher das ist... > Im Sensor muss somit eine Interpolation stattfinden Hört sich an, als ob dieser "Encoder" eigentlich ein Resolver wäre. Denn die sind im tiefsten Inneren völlig analog und können per Siunus und Cosinus alle Zwischenwerte. Und 360.000 sind eine irgendwie völlig "undigitale" Zahl. https://www.celeramotion.com/inductive-sensors/de/unterstützen/technische-dokumente/resolver-und-encoder-im-vergleich/
:
Bearbeitet durch Moderator
Marco F. schrieb: > Im Sensor muss somit eine Interpolation stattfinden Glaube ich nicht, die hilft nicht bei der Feinregulierung. Wird wohl eher eine mehrbittige Graycode Variante sein, optisch oder magnetisch
Marco F. schrieb: > Wie geht das technisch Vektorregelung. Der Motor wird also bestromt und über den Encoder gemessen um die Position (mit vollem Drehmoment wenn ausreichend gekühlt) zu halten. Ohne Strom hat er kein Haltemoment. Marco F. schrieb: > ein Geberrad mit geschätzten 250 Teilungen Das ermoglicht auch schon 0.36 Grad Auflösung Marco F. schrieb: > ich würde mal die zulässige Winkelabweichung auch kleiner 0,025° > schätzen Dafür reicht rein digitale Auswertung nicht. Marco F. schrieb: > Encodertyp herausbekommen und siehe da, der hat 360.000 Pulse pro > Umdrehung! Das wären mehr als genug.
Angehängte Dateien:
-

fanuc-sensor.png
45 KB
Der Geber ist ein Fanuc A860-2150-T401, hier könnt ihr euch mal das Geberrad ansehen: https://www.ebay.com/itm/304921829172 Es hat 256 Rillen, mein Schätzung lag schonmal ganz gut. Die Interpolation erfolgt auf dem Umrichter, das Übertragung als differentielles Spannungssignal. Kannte ich so bisher noch nicht, wieder was gelernt. Schöne Grüße, Marco
:
Bearbeitet durch User
Marco F. schrieb: > Es hat 256 Rillen, mein Schätzung lag schonmal ganz gut. Die > Interpolation erfolgt auf dem Umrichter Da wird im Grunde nichts "interpoliert" im Sinne von "ich knobele mir mit einem schlauen Algorithmus die Position zwischen zwei Zähnen irgendwie heraus". Sondern es wird (ähnlich wie beim Resolver) das analoge und auch zwischen zwei Zähnen an jeder "Zwischenposition" zu jeder Zeit definierte Sin-Cos-Signal in Weginkremente umgerechnet.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.