In einem Motor habe ich einen AS5048 Hall Encoder. Hat jemand Erfahrung mit magnetischen Winkelencodern? Muss man die kalibrieren?
Christoph M. schrieb: > In einem Motor habe ich einen AS5048 Hall Encoder. > Hat jemand Erfahrung mit magnetischen Winkelencodern? Muss man die > kalibrieren? Mag jetzt abgedroschen klingen, aber was sagt das Datenblatt?
Christoph M. schrieb: > Muss man die kalibrieren? Eine Kalibrierung alleine würde dir nichts nützen. Du müsstest die ausgegeben Werte anhand des Ergebnises dieser Kalibierung umrechnen. Die Auflösung bei der Ausgabe ist deutlich höher, als die Nichtlinearität. Es kommt also auf deine Anforderungen und die Stabilität der Umgebungsbedingungen an. Im Datenblatt ist angegeben, wie genau der Magneten über dem Sensor positionierst werden muss (S.31) und welche Linearität dann mit der eingebauten Offset-Kompensation erreicht wird. Der Zustand wird durch das OCF-Flag angezeigt.
:
Bearbeitet durch User
Christoph M. schrieb: > Hat jemand Erfahrung mit magnetischen Winkelencodern? Muss man die > kalibrieren? Ja und nein. Sie funktionieren, wenn sie in geeignetem Abstand zum Magneten montiert sind. Man kann aber die 0-Grad Position festlegen, und wenn man besonders genaue Messwerte haben will muss man kalibrieren, was im wesentlichen softwaretechnisch die nicht perfekt zentrische und plane Montage korrigiert.
Cyblord -. (cyblord)
23.09.2025 12:17
> Mag jetzt abgedroschen klingen, aber was sagt das Datenblatt?
Danke, in dem Falle muss ich dir ausnahmsweise recht geben.
Das Datenblatt sagt:
INLOPT @25ºC INL OPT+TEMP
Non-linearity, optimum placement of the magnet
± 0.8deg
und passt damit genau zu meiner Messung. Das ist schlecht.
Eigentlich muss ich die Rotationsgeschwindigkeit messen. Gibt es da
besser geeignete Sensoren in der Bauform?
Was interessiert die Positionsgenauigkeit bei einer Geschwindigkeitsmessung?
Die Geschwindigkeit ist die erste Ableitung des drehwinkels. Damit ist der Ortsfehler auch ein Geschwindigkeitsfehler
Christoph M. schrieb: > Eigentlich muss ich die Rotationsgeschwindigkeit messen. Bei welchen Winkelgeschwindigkeiten und mit welcher Zeitauflösung?
:
Bearbeitet durch User
>Bei welchen Winkelgeschwindigkeiten und mit welcher Zeitauflösung?
Gute Frage. Ein Umdrehung braucht ca. 2 Sekunden. Die Zeitauflösung
schätze ich im Moment auf ca. 10ms.
Christoph M. schrieb: >>Bei welchen Winkelgeschwindigkeiten und mit welcher Zeitauflösung? > Gute Frage. Ein Umdrehung braucht ca. 2 Sekunden. Die Zeitauflösung > schätze ich im Moment auf ca. 10ms. Damit könnte man fast schon die Umdrehungsgeschwindigkeit von Georg Simon Ohm in seinem Grab messen, nach dem er von diesem Forum erfahren hat. Fast.
Christoph M. schrieb: > Die Zeitauflösung schätze ich im Moment auf ca. 10ms. Wieso schätzen? Du musst doch eine Vorstellung davon haben, mit welcher Zeitauflösung du die Rotationsgeschwindigkeit messen musst. Die Messung ist doch kein Selbstzweck. Noch eine Frage: Mit welcher nutzbaren Auflösung muss die Rotationsgeschwindigkeit gemessen werden?
:
Bearbeitet durch User
>Noch eine Frage: >Mit welcher nutzbaren Auflösung muss die Rotationsgeschwindigkeit >gemessen werden? Ziemlich genau: 0.01%
Christoph M. schrieb: > Ziemlich genau: > 0.01% Um bei einer Drehzahl von 0,5 1/s innerhalb von 10ms die Rotationsgeschwindigkeit auf 0,01% messen zu können, brauchst du einen Winkelsensor mit einer Auflösung von etwa 0.6", falls ich mich nicht verrechnet habe. Da solltest du noch einmal ganz in Ruhe drüber nachdenken.
Rainer W. schrieb: > Christoph M. schrieb: >> Ziemlich genau: >> 0.01% > Da solltest du noch einmal ganz in Ruhe drüber > nachdenken. Ichg stimme Rainer vollkommen zu: Mit diesen Vorgaben und Anforderungen wird das nix: Abtastintervall versus Winkelgeschwindigkweit versus Auflösung/Genauigkeit passt nicht. Schau dir mal an was richtig gute Drehgeber so können - daran kannst du deine Anforderungen dann mal abgleichen: https://www.heidenhain.de/produkte/drehgeber/anbau/rod-1000
>Schau dir mal an was richtig gute Drehgeber so können - daran kannst du >deine Anforderungen dann mal abgleichen: >https://www.heidenhain.de/produkte/drehgeber/anbau/rod-1000
1 | Positioniergenauigkeit bis ±18" |
Na immerhin kommt er in die Größenordnung der 0.6", wenn man mal den Faktor 30 ignoriert .. Da v=ds/dt, spielt die Zeit auch eine Rolle.
Optische Encoder arbeiten nach einem anderen Prinzip wie der im Eingang erwähnte Hallsensor. Vielleicht wären diese besser für das Problem geeignet. Mit was für einer maximalen Strichauflösung kann man da rechnen?
Christoph M. schrieb: > Eigentlich muss ich die Rotationsgeschwindigkeit messen. Gibt es da > besser geeignete Sensoren in der Bauform? Warum nicht direkt die Drehzahl messen, z.B. mit einem Tachogenerator: https://www.baumer.com/de/de/produktubersicht/drehgeber-winkelsensoren/heavyduty-tachogeneratoren-resolver/c/318/products Ob das "die Bauform" ist, musst Du selber ermitteln. So hat man in der guten alten Zeit Drehzahlen gemessen, denn wir hatten ja nichts... :-) Grüßle, Volker
Christoph M. schrieb: > Optische Encoder arbeiten nach einem anderen Prinzip wie der im Eingang > erwähnte Hallsensor. Eigentlich nicht. Nur verwenden sie an Stelle des Magneten mit zwei Hall-Elementen eine optische Strichplatte und entsprechende optische Sensoren. Bei der optischen Abtastung sitzt die Sensorik im Gegensatz zum AS5048 nicht zentrisch, so dass man mehr Striche/Pole verwenden kann. > Mit was für einer maximalen Strichauflösung kann man da rechnen? WDGI 58A von Wachendorff gibt es bspw. mit einer Winkelauflösung von 13" https://www.wachendorff-automation.de/drehgeber-vollwelle-inkremental-optisch-synchroflansch-wdgi58a/
:
Bearbeitet durch User
Rainer W. schrieb: >> Mit was für einer maximalen Strichauflösung kann man da rechnen? > > WDGI 58A von Wachendorff gibt es bspw. mit einer Winkelauflösung von 13" > https://www.wachendorff-automation.de/drehgeber-vollwelle-inkremental-optisch-synchroflansch-wdgi58a/ Jepp. Und das kann man schon lange ;-) Selbst der alte Haidenheingeber hier an der Erodiermaschine (Bj. 1982) hat 0,005° Auflösung.
Christoph M. schrieb: > Optische Encoder arbeiten nach einem anderen Prinzip wie der im Eingang > erwähnte Hallsensor. > Vielleicht wären diese besser für das Problem geeignet. Mit was für > einer maximalen Strichauflösung kann man da rechnen? Ich beantworte dir lieber eine andere Frage. Wie groß müßte ein optischer Encoder sein, um 0.6 Bogensekunden (0.000167°) auflösen zu können? Antwort: bei einer Strichstärke von 0.5mm und Quadratur-Auswertung (4 Schritte pro mm) bräuchte er ein Encoderrad mit 172m Durchmesser. Wenn ich mich nicht verrechnet habe. Etwas unhandlich.
Chris D. schrieb: > Selbst der alte Haidenheingeber hier an der Erodiermaschine (Bj. 1982) > hat 0,005° Auflösung. Ja, das sind 18". Optik konnte man auch 1982 schon. Die Frage war, was es an deutlich höherer Auflösung gibt. Axel S. schrieb: > Antwort: bei einer Strichstärke von 0.5mm und Quadratur-Auswertung (4 > Schritte pro mm) Du sollst das Ding nicht per unbewaffnetem Auge auswerten ;-) Optische Sensoren liegen bei einige µm.
:
Bearbeitet durch User
Rainer W. schrieb: > Du sollst das Ding nicht per unbewaffnetem Auge auswerten ;-) > Optische Sensoren liegen bei einige µm. Von 500µm herunter auf 5µm wäre Faktor 100. Das verkleinert den Durchmesser von 170m auf 170cm. (Ohne die eigentlichen Werte durch gerechnet zu haben)
Christoph M. schrieb: >> Optische Encoder arbeiten nach einem anderen Prinzip wie der im Eingang >> erwähnte Hallsensor. >> Vielleicht wären diese besser für das Problem geeignet. Mit was für >> einer maximalen Strichauflösung kann man da rechnen? Axel S. (a-za-z0-9) 24.09.2025 18:13 >Ich beantworte dir lieber eine andere Frage. Wie groß müßte ein >optischer Encoder sein, um 0.6 Bogensekunden (0.000167°) auflösen zu >können? >Antwort: bei einer Strichstärke von 0.5mm und Quadratur-Auswertung (4 >Schritte pro mm) bräuchte er ein Encoderrad mit 172m Durchmesser. Wenn >ich mich nicht verrechnet habe. Etwas unhandlich. Die Frage war rein aus Interesse. Es gibt nämlich einen grundsätzlichen Denkfehler: Für eine hohe Genauigkeit der Geschwindigkeitsmessung ist nämlich die Strichauflösung gar nicht unbedingt entscheidend, sondern der zeitliche Jitter, mit dem man die Flanken messen kann. Da v=ds/dt ist darf ds ruhig konstant sein, wenn die Information in dt liegt.
:
Bearbeitet durch User
Rainer W. schrieb:
> WDGI 58A von Wachendorff gibt es bspw. mit einer Winkelauflösung von 13"
Interessantes Teil. Bei RS liegt der bei ca. 300€. Dort wird die
Impulszahl mit 5000 angegeben und im Datenblatt steht bis 25000.
Volker schrieb: >Warum nicht direkt die Drehzahl messen, z.B. mit einem Tachogenerator: >https://www.baumer.com/de/de/produktubersicht/drehgeber-winkelsensoren/>heavyduty-tachogeneratoren-resolver/c/318/products >Ob das "die Bauform" ist, musst Du selber ermitteln. >So hat man in der guten alten Zeit Drehzahlen gemessen, denn wir hatten >ja nichts... :-) Mir scheint, die Tachogeneratoren sind eher für höher Geschwindigkeiten gemacht. Ich habe mal den GTF7 Tachogenerator angeschaut: Dort steht 10..60mV pro U/min. Meine Rotationsgeschwindigkeit liegt bei ca. 40U/min das wäre dann eine Spannung von 0.4 bis 2.4V was ein ziemliche Schwankungsbreite ist.
Christoph M. schrieb: > Dort wird die Impulszahl mit 5000 angegeben und im Datenblatt steht bis > 25000. Den Drehgeber gibt es eben mit verschiedenen Impulszahlen pro Umdrehung (s. Datenblatt) Christoph M. schrieb: > Für eine hohe Genauigkeit der Geschwindigkeitsmessung ist nämlich die > Strichauflösung gar nicht unbedingt entscheidend, sondern der zeitliche > Jitter, mit dem man die Flanken messen kann. Die schönste Zeitmessung nützt nichts, wenn der Jitter der vom Geber kommenden Pulseflanken größer als für die Geschwindigkeitsmessung erforderlich ist. Falls man also nicht nur Flanken zählen, sondern Zeitabstände messen will, muss der Geber die Flanken auch ausreichend jitterarm und kurzzeitstabil erzeugen.
:
Bearbeitet durch User
Angehängte Dateien:
-

encoder.JPG
48 KB
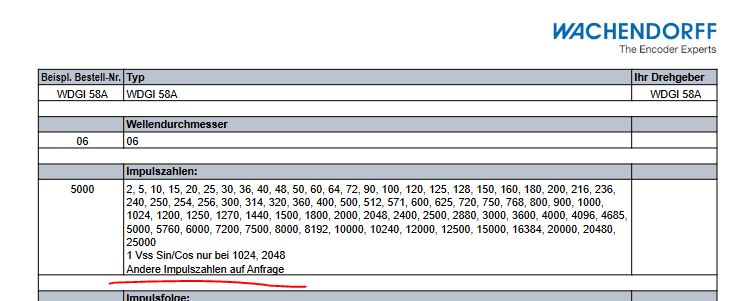
Christoph M. schrieb: > Bei RS liegt der bei ca. 300€. Dort wird die > Impulszahl mit 5000 angegeben und im Datenblatt steht bis 25000. RS bietet eben nur diese eine Ausführung an. Weitere stehen im Datenblatt.
>RS bietet eben nur diese eine Ausführung an. Weitere stehen im >Datenblatt. Da befürchte ich mal, dass der Preis mit der Impulszahl exponentiell steigt.
Christoph K. schrieb: > Die Geschwindigkeit ist die erste Ableitung des drehwinkels. Damit ist > der Ortsfehler auch ein Geschwindigkeitsfehler Falsch! Wie du richtig schreibst die Ableitung. Und was passiert mit einem konstanten Glied bei einer Ableitung? Es fliegt raus! Mathe 11 Klasse.
Christoph M. schrieb: > Da befürchte ich mal, dass der Preis mit der Impulszahl exponentiell > steigt. Wie sehr sich die auf den Preis auswirkt, hängt dann immer noch von der Konstanten im Exponenten ab ;-) Das ließe sich aber durch einen einfachen Telefonanruf (+49 6722 996525) oder durch eine Email an sales-wa@wachendorff.de klären.
:
Bearbeitet durch User
Udo S. schrieb: > Christoph K. schrieb: > ... Und was passiert mit einem konstanten Glied bei einer Ableitung? > Es fliegt raus! > Mathe 11 Klasse. Herzlichen Glückwunsch. Du hast den Offset entdeckt. Und richtig, die absolute Position spielt für die Bestimmung der Geschwindigkeit keine Rolle, sondern nur die zeitliche Änderung.
Rainer W. schrieb: > Herzlichen Glückwunsch. Du hast den Offset entdeckt Nein, das haben schon Newton und Leibnitz gemacht. Ich habe lediglich eine falsche Aussage korrigiert. DU kannst also deinen Sarkasmus gerne behalten ;-)
Christoph M. schrieb: > Mir scheint, die Tachogeneratoren sind eher für höher Geschwindigkeiten > gemacht. > Ich habe mal den GTF7 Tachogenerator angeschaut: Dort steht 10..60mV pro > U/min. Meine Rotationsgeschwindigkeit liegt bei ca. 40U/min das wäre > dann eine Spannung von 0.4 bis 2.4V was ein ziemliche Schwankungsbreite > ist. Das nützt dir alles nichts. Der Absolutwert wäre gar nicht das Problem, aber der Sensor müsste eine Genauigkeit von <0,01% haben und deine Spannungsmessung auch. Du musst deine ziemlich utopischen Forderungen deutlich runterschrauben. Also entweder die Genauigkeit oder die zeitliche Auflösung. Das hat dir Rainer W. doch schon vorgerechnet.
Rainer W. (rawi) 23.09.2025 22:21 >>Bei welchen Winkelgeschwindigkeiten und mit welcher Zeitauflösung? Christoph M. schrieb: > Gute Frage. Ein Umdrehung braucht ca. 2 Sekunden. Die Zeitauflösung > schätze ich im Moment auf ca. 10ms. > 0.01% Geschwindigkeit >>Um bei einer Drehzahl von 0,5 1/s innerhalb von 10ms die >>Rotationsgeschwindigkeit auf 0,01% messen zu können, brauchst du einen >>Winkelsensor mit einer Auflösung von etwa 0.6", falls ich mich nicht >>verrechnet habe. Da solltest du noch einmal ganz in Ruhe drüber >>nachdenken. Da hast du meiner Meinung nach einen Rechenfehler gemacht. Wenn der Umlauf 2 Sekunden braucht und die Zeitauflösung 10ms ist, ist der Drehwinkel 360°*0.01s/2s=1.8°. Würde man einen optischen Encoder mit Impulsausgang nehmen, währen also 200Pulse/Umdrehung ausreichend.
:
Bearbeitet durch User
Naja, vom einfachen Streifenzählen ist man bei hoch auflösenden Winkelgebern schon lange weg. Durch geeignete Optik macht man da Sinus und Cosinus draus und kann deren Phasenlagen bestimmen. Damit kan man den Strich auch Faktor 100 oder 1000 feiner auflösen. Bedingt natürlich das die Striche auf dem Kreis genau sind, die Strichplatte zentrisch montiert ist, und dass die Leseköpfe (mehr als einer) korrekt montiert sind. Selbst dann wird man noch eine Eierkurve bekommen ;) Christoph (TS) kann sich ja mal überlegen wie genau seine Achslagerung ist, und wie groß sein Sensor sein darf. Irgendwann macht die feinere Auflösung dann auch keinen Sinn mehr. Mit Kalibrierung und Kompensation kann man da schon weit kommen, schnell ist jedoch die mechanische Reproduzierbarkeit das Problem. Wenn es um Winkelgeschwindigkeit geht, kann man auch Faserkreisel nehmen ;) Die Besseren messen dann auch schon die Erdrotation .. muss man wenn nötig korrigieren (Teuer und schwer zu bekommen, da DUAL-USE.. ;) )
Christoph K. schrieb: > Die Geschwindigkeit ist die erste Ableitung des drehwinkels. Damit ist > der Ortsfehler auch ein Geschwindigkeitsfehler Stimmt. Aber eine Geschwindigkeits- messung basiert auf der Zeit zwischen zwei 0°-Durchgängen. die genaue Position des 0°-Punktes spielt dann keine Rolle. Jens K.
Christoph M. schrieb: > Wenn der Umlauf 2 Sekunden braucht und die Zeitauflösung 10ms ist, ist > der Drehwinkel 360°*0.01s/2s=1.8°. Die 1,8° sind der Drehwinkel innerhalb von 10ms. Um die Drehgeschwindigkeit auf 0.01% zu messen, muss die Winkelauflösung das 10000-fache betragen.
:
Bearbeitet durch User
Christoph M. schrieb: >> Wenn der Umlauf 2 Sekunden braucht und die Zeitauflösung 10ms ist, ist >> der Drehwinkel 360°*0.01s/2s=1.8°. Rainer W. (rawi) 25.09.2025 10:44 >Die 1,8° sind der Drehwinkel innerhalb von 10ms. Um die >Drehgeschwindigkeit auf 0.01% zu messen, muss die Winkelauflösung das >10000-fache betragen. Ok, vielleicht sollte ich meine Anforderung etwas präzisieren: die Messzeit muss nicht konstant, sondern kleiner gleich 10ms sein. In diesem Fall ist dein Ergebnis falsch. Bedenke: man kann auch Zeiten messen, nicht nur Impulse.
Henrik V. (henrik_v) 25.09.2025 10:09 >Christoph (TS) kann sich ja mal überlegen wie genau seine Achslagerung >ist, und wie groß sein Sensor sein darf. Eigentlich nicht: Der Encoder ist genau dazu da, Rückschlüsse auf mechanische Toleranzen zu machen. Die kann man nicht überlegen, die kann man nur messen.
Christoph M. schrieb: > Bedenke: man kann auch Zeiten messen, nicht nur Impulse. Damit du sinnvoll die Zeitdifferenz messen kannst, müssen trotzdem die Flanken mit ausreichend hoher nutzbarer Winkelauflösung vom Sensor geliefert werden, d.h. der Jitter muss so klein sein, dass deine Genauigkeitsanforderung erfüllbar ist.
Christoph M. schrieb: > Der Encoder ist genau dazu da, Rückschlüsse auf > mechanische Toleranzen zu machen. Die kann man nicht überlegen, die kann > man nur messen. Herrlich die Salamischeiben-Taktik! Wenn es um Qualitätssicherung geht, würde ich einen ganz anderen Ansatz wählen: Auf dem Wellenende ein Art rotationssymmetrische Noniuskonstruktion montieren, ähnlich eines Messschiebers, die dann mittels Camera ausgewertet wird. Vielleicht kannst Du eine KI dressieren? :-) Viele Grüße von Volker, der sich schon auf die nächste Salamischeibe freut!
:
Bearbeitet durch User
Christoph M. schrieb: > Ok, vielleicht sollte ich meine Anforderung etwas präzisieren: die > Messzeit muss nicht konstant, sondern kleiner gleich 10ms sein. In > diesem Fall ist dein Ergebnis falsch. > Bedenke: man kann auch Zeiten messen, nicht nur Impulse. Richtig, da bin ich auch reingefallen. Dann kommt der Jitter wieder ins Spiel, wenn du mit 0,01% genau messen willst, dann darf der Jitter nicht größer als 360 / (Imp/U * 10000) Grad sein. Wenn deine Welle aber auch langsamer drehen soll, dann benötigst du immer mehr Schritte pro Umdrehung, um in 0,01s einen neuen Messwert zu bekommen.
p.s. Ob man letztendlich nur Flanken zählt oder zusätzlich noch die Phase mit nutzt, ändert nichts daran, dass der Jitter der Winkelsignale klein genug sein muss. Mit dem von Henrik vorgeschlagenen Sagnac-Interferometer hätte man immerhin eine gleichmäßige "Strich-Teilung". Der Jitter wird dort wesentlich durch die Wellenlängen/Weg-Stabilität und das Rauschen bei der Phasenmessung bestimmt. Vorteil ist, dass man über die Anzahl der Umläufe der Lichtstrahlen (=Windungsanzahl beim Glasfaserkreisel) die Wegstrecke und damit die Auflösung relativ bequem hochschrauben kann. Henrik V. schrieb: > Wenn es um Winkelgeschwindigkeit geht ...
:
Bearbeitet durch User
Christoph M. schrieb: > Da hast du meiner Meinung nach einen Rechenfehler gemacht. > Wenn der Umlauf 2 Sekunden braucht und die Zeitauflösung 10ms ist, ist > der Drehwinkel 360°*0.01s/2s=1.8°. Würde man einen optischen Encoder mit > Impulsausgang nehmen, währen also 200Pulse/Umdrehung ausreichend. kommt darauf an wie die Definition lautet. du musst in deiner Torzeit von 10ms mindestens DREI Impule haben, um die Zeit dazwischen messen zu können. wenn es innerhalb von 10 ms ein absolut richtiger und genauer Wert sein soll. Beispiel (der erste und letzte Impuls werde nicht mehr erreicht): <----10MS------> |----|-----|-----| damit musst du 600 Impulse pro Umdrehung haben. wenn du innerhalb von 10ms nur einen neuen Wert haben willst, reichten die 200 Impulse aus. diese müssen aber dann mit einer Linearität von 0.01% ausgewertet werden. Das macht dann 129" max Fehler für die Messkette. Ich würde bei der Impulszahl Richtung 6-10k gehen und mehrere Zähler parallel laufen lassen. sollte mit einem guten Geber schaffbar sein. Leider ist die Toleranz oft nicht angegeben, oder schlecht. zb: https://at.rs-online.com/web/p/bewegungssensoren/2859420 mit 0,5+-10% geht es hier um audiophile Hirnwixxerei? => Schallplatten laufen mit 33 U/min?
:
Bearbeitet durch User
Clemens S. schrieb: > du musst in deiner Torzeit von 10ms mindestens DREI Impule haben, um die > Zeit dazwischen messen zu können. wenn es innerhalb von 10 ms ein > absolut richtiger und genauer Wert sein soll. Muss man nicht. Es reicht die Pulse als Tor zu verwenden. Dann reichen zwei Pulse, deren Abstand man misst.
:
Bearbeitet durch User
Angehängte Dateien:
-

DLS40E_Duty.png
17 KB
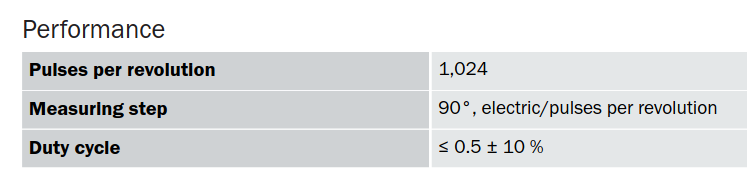
>sollte mit einem guten Geber schaffbar sein. Leider ist die Toleranz oft >nicht angegeben, oder schlecht. >zb: https://at.rs-online.com/web/p/bewegungssensoren/2859420 mit >0,5+-10% Eine komische Angabe. Ich deute sie mal als Faktor 10 für die Impulsanzahl, wenn man die Periode misst. Als dann knapp 10.000 bei dem Encoder. >geht es hier um audiophile Hirnwixxerei? => Schallplatten laufen mit 33 >U/min? Die scheinen tatsächlich eine ähnliche Drehzahl wie bei mir zu haben. Welche Genauigkeit ist dort gefordert? Besser als meine?
Rainer W. schrieb: > Clemens S. schrieb: >> du musst in deiner Torzeit von 10ms mindestens DREI Impule haben, um die >> Zeit dazwischen messen zu können. wenn es innerhalb von 10 ms ein >> absolut richtiger und genauer Wert sein soll. > > Muss man nicht. Es reicht die Pulse als Tor zu verwenden. Dann reichen > zwei Pulse, deren Abstand man misst. Yep. Prinzip Reziprokzähler. Allerdings muß man dann die minimale Frequenz (oder die maximale Impulsdistanzzeit angeben). Und das Signal muß halt ausreichend jitterarm sein. Mit 1000 Impulsen pro 10ms sollte das klappen wenn der Jitter < 10% der Periode ist. Wenn weniger Jitter, reichen auch weniger Impulse.
Ich würde da jetzt keinen Reziprokzähler verwenden, sondern jede Flanke mit einem Timestamp versehen. Also µC mit input capture und schnellen internem Zähler. (problem des µC Hochtaktens mit sch... interner PLL, also ggf FPGA und guter clocksource, ggf reicht ja auch schon der direkte Takteingang, müsste man (bzw der TS) rechnen) Der TS hat leider keine weiteren Details genannt, die 10ms scheinen wohl für einen Regler nötig zu sein... je nach Regelgüte des Gesammtsystems kann dann man dann auch Daten der letzten xx ms nehmen. Oder man schraubt noch etwas J (Masse) dran ;) Selbst wenn der Geber wegen des Gitters jittert, wird er das in erster Näherung periodisch mit einer Umdrehung machen , kann man auch noch kompensieren. Problem sind eher Montageungenauigkeiten im Geber und des Gebers an die Welle. Das muss man eh messen und kompensieren, WENN die o.g. Anforderungen nicht eh akademisch sind. (Endlich ein Plattenspieler mit perfektem Gleichauf ;) )
Henrik V. schrieb: > Selbst wenn der Geber wegen des Gitters jittert, wird er das in erster > Näherung periodisch mit einer Umdrehung machen , kann man auch noch > kompensieren. Wenn es nur 0.5 Umdrehungen pro Sekunde sind, man aber alle 10ms einen Meßwert braucht, kann man keinen Jitter rausrechnen der periodisch mit einer Umdrehung ist :) Aber das "entjittern" durch die Berücksichtigung mehrerer Impulse klappt immer. Du kannst das auch gern in absoluten Zahlen rechnen: wenn in 10ms auf 0.01% (ein 10.000stel) genau gemessen werden soll, muß die Periode mit einem Fehler von maximal 1µs gemessen werden. Wenn 1000 Impulse im Zeitfenster liegen, ist die (mittlere) Periode 10µs. Damit darf der impuls maximal 10% der Periode zu früh oder zu spät kommen. Das ist eine recht relaxte Anforderung. Die Zeitmessung auf Seite des Controllers muß natürlich auch mit einer Genauigkeit (nicht: Auflösung) besser 1µs geschehen. Aber wenn man einen Timer mit Capture-Funktion hat, dann kann man den auch auf einem kleinen µC wie dem AVR problemlos mit 10Mhz laufen lassen.
Danke für eure Beiträge. Jetzt haben sich alle auf die Impulszähler eingeschossen. Eigentlich ist in dem Motor ja ein AS5048 mit 14Bit und ca. 10kHz Abtastrate eingebaut. So ein Hallsensor ist vom Einbau und Handling wesentlich einfacher und außerdem billiger als ein Impulszähler. Eine entscheidende Frage ist, ob man den AS5048 durch einen Hallencoder gleicher Baugröße aber besseren Eigenschaften ersetzen könnte.
Du hast oben geschrieben, das du mit dem Hallsensor 0,8% gemessen hast, aber 0,01% möchtest. Faktor 80 durch Kalibrierung und Kompensation ist nicht unmöglich, WENN dein System stabil genug ist. DAS zu validieren ist machbar, macht aber arbeit. Bei den Halldingern bin ich wg. Einstreuen der Motormagnetfelder unsicher, kannst je mal testen.
>Du hast oben geschrieben, das du mit dem Hallsensor 0,8% gemessen hast, >aber 0,01% möchtest. Nicht ganz: Im Datenblatt steht für die INL 0.8° Winkelgenauigkeit. Die habe ich gemessen. Ein voller Umlauf ist ja 360°. Die Geschwindigkeit will ich auf 0.01% genau messen.
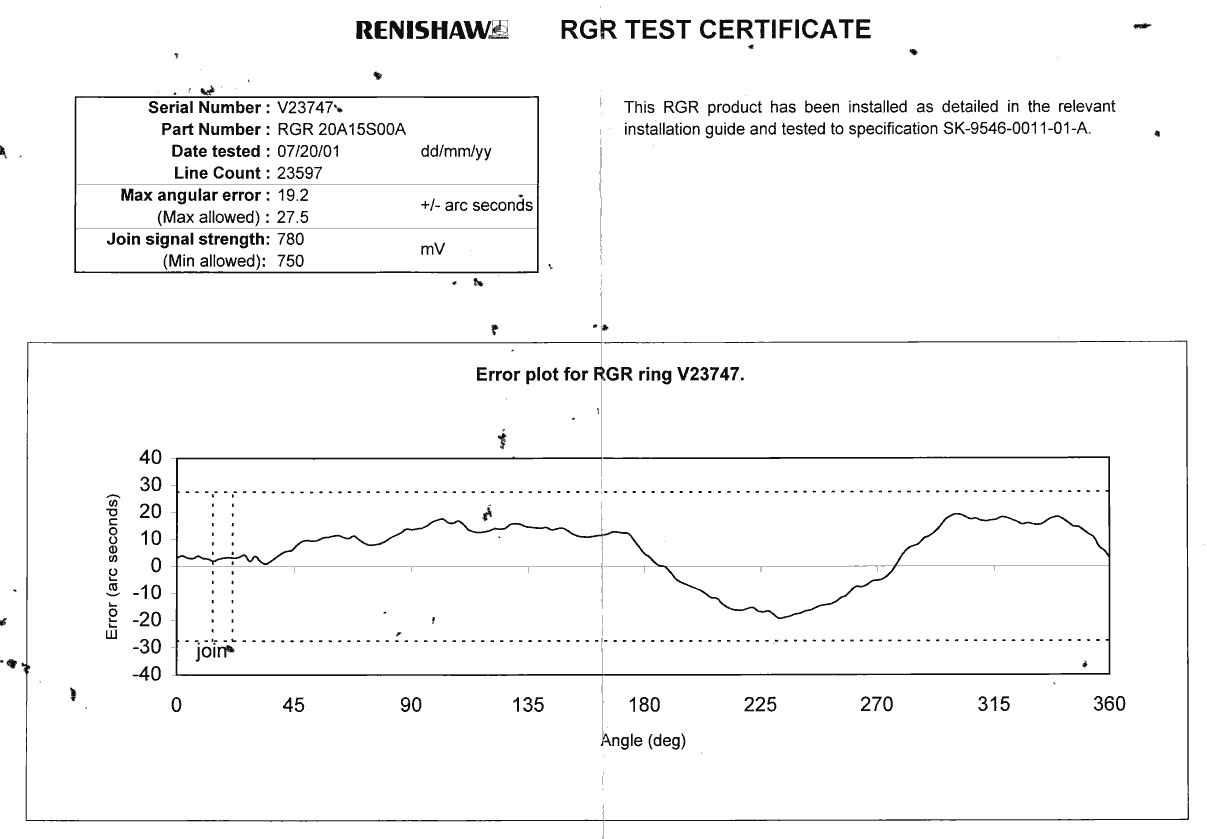
Ich hab jetzt nicht alles gelesen, aber wenn es wirklich genau werden soll. Renishaw RESR Encoderscheibe mit RGH24 Encoder. Z.B. mit einer 52mm Encoderscheibe und RGH24O Encoder 16384000 Striche pro Umdrehung, also 0,08".
Hier spricht Renishaw für das RESR Winkelmesssystem sogar von einer Auflösungen/Wiederholgenauigkeit bis 0,008". https://www.renishaw.com/resourcecentre/download/(aad17a8ebdae4dbb81445fcc3d6b8080)
Ste N. (steno) 27.09.2025 15:45 >ich hab jetzt nicht alles gelesen, aber wenn es wirklich genau werden >soll. Renishaw RESR Encoderscheibe mit RGH24 Encoder. Die scheinen sehr interessant. Die Preise werden wohl über 200€ liegen.
Angehängte Dateien:
-

rgr_test_certificate.gif
23 KB
{kind=link}
Rainer W. schrieb: > Hier spricht Renishaw für das RESR Winkelmesssystem sogar von einer > Auflösungen/Wiederholgenauigkeit bis 0,008". Das gilt dann allerdings für die 550mm Encoderscheibe. Christoph M. schrieb: > Die scheinen sehr interessant. Die Preise werden wohl über 200€ liegen. Ich glaube da kannst du locker noch ne 0 dranhängen, wenn das reicht. Geanuigkeit will eben bezahlt werden. Dafür kommt jede Scheibe mit einem Messprotokoll für die Winkelabweichung auf 360°.
Henrik V. schrieb: > Der TS hat leider keine weiteren Details genannt, die 10ms scheinen wohl > für einen Regler nötig zu sein... je nach Regelgüte des Gesammtsystems > kann dann man dann auch Daten der letzten xx ms nehmen. Oder man > schraubt noch etwas J (Masse) dran ;) Ich würde bei dem, was Henrik geschrieben hat, ansetzen. Die geforderte Genauigkeit bei der Geschwindigkeitsmessung hängt doch in erster Linie vom Trägheitsmoment des mechanischen Systems ab, nicht vom (wahrscheinlich) angesteuerten (PID/nl) Regler. Darüber gab es vom TO aber noch keine Infos. Ist nur ein besonders guter Rundlauf das Ziel, helfen notfalls zusätzliche Massen und der eingebaute Hallsensor reicht aus. Stichwort Schallplattenspieler. Also, Frage: welche maximale DrehBESCHLEUNIGUNG ist zu erwarten und wofür wird die Geschwindigkeitsmessung benötigt? Also, weshalb ausgerechnet <10ms und nicht mehr? Sag jetzt nicht, dass das der Takt der steuernden SPS ist...
:
Bearbeitet durch User
Ste N. schrieb: > Ich glaube da kannst du locker noch ne 0 dranhängen, wenn das reicht. > Geanuigkeit will eben bezahlt werden. Dafür kommt jede Scheibe mit einem > Messprotokoll für die Winkelabweichung auf 360°. Reicht nicht. Ich kenne die Encoder-Systeme, die Leica/Hexagon in der Ostschweiz baut. Das sind solche geätzten Scheiben mit mehrlagigen Codes, die eine sehr feine Auflösung gestatten. Da legt man richtig Geld für hin und kalibrieren muss man sie obendrein. Wäre nur fraglich, ob so präzise Systeme hier (Motorgeschwindigkeit) nötig sind. Für solche Anwendungen gibt es fertige Winkelencoder mit bis zu 1800 Stellungen pro Vollkreis. Das ist bei schneller und genauer Erfassung mehr als ausreichend, um Beschleunigungen zu messen und zu regeln. Kosten um 150,-
Ste N. (steno) 27.09.2025 23:01 > rgr_test_certificate.gif Danke dafür :-) Das ist auf jeden Fall mal was handfestes. Rolf (audiorolf) 29.09.2025 18:13 >Für solche Anwendungen gibt es fertige Winkelencoder mit bis zu 1800 >Stellungen pro Vollkreis. Das ist bei schneller und genauer Erfassung >mehr als ausreichend, um Beschleunigungen zu messen und zu regeln. >Kosten um 150,- Ein Winkelencoder für 150€ mit 1800 Impulsen/Umdrehung wäre interessant. Hast du eine Typenbezeichnung? Wie oben schon ausgeführt, kommt es für die genaue Geschwindigkeitsmessung auf die Flankengenauigkeit an. Die darf bei der hohen Auflösung dann auch nicht zu ungenau sein.
Christoph M. schrieb: > Wie oben schon ausgeführt, kommt es für die genaue > Geschwindigkeitsmessung auf die Flankengenauigkeit an. Die darf bei der > hohen Auflösung dann auch nicht zu ungenau sein. Kommt jetzt auch darauf an wie schnell man auf Geschwindigkeitsänderungen reagieren muss. Ich nehme für Drehzahlmessungen gerne den Mittelwert der letzten vier Messungen. Damit bekommt man Flankenabweichungen etwas in den Griff, Drehzahländerungen erkennt man dann allerdings etwas verzögert. Ein professionelles System welches ich kenne bietet die Möglichkeit eine Referenzkurve der Flankenabweichungen des Gebers aufzuzeichnen und damit die Messwerte im Nachhinein wieder zu korrigieren. Bei ausreichend Rechenleichtung sollte so eine Flankenkorrektur mit Referenzkurve auch in Software direkt bei laufender Messung möglich sein.
Christoph M. schrieb: > Wie oben schon ausgeführt, kommt es für die genaue > Geschwindigkeitsmessung auf die Flankengenauigkeit an. Die darf bei der > hohen Auflösung dann auch nicht zu ungenau sein. Sie muss sogar extrem genau sein, nämlich 180°/s · 10ms · 0,01% = 0,00018° Nehmen wir als Beispiel eine Strichscheibe mit einem Durchmesser von 100mm. Am Umfang dieser Scheibe entsprechen die 0,00018° einem Weg von 0,00018° · (π / 180°) · (100mm / 2) = 0,16µm Wenn man alle anderen Fehlerquellen ausschließt (Signalrauschen bei der elektronischen Auswertung, Lagerspiel des Motors usw.), dürfen die Ränder der Striche auf der Scheibe um maximal 0,16µm von ihrer Sollposition abweichen. Bedenke, dass die 0,16µm deutlich unterhalb der Wellenlänge des sichtbaren Lichts liegen. Kein Hersteller wird für den Preis von 150€ diese Genauigkeit auch nur ansatzweise erreichen. Christoph M. schrieb: > Ein Winkelencoder für 150€ mit 1800 Impulsen/Umdrehung wäre interessant. Das entspricht einer Auflösung von 0,2°. Geh einfach mal davon aus, dass Ein Encoder mit 0,2° Auflösung nicht mit einer Genauigkeit von 0,00018° (das ist ein Unterschied von 3 Größenordnungen!) gefertigt wird. Aber selbst wenn die Strichscheibe und die Elektronik perfekt genau (d.h. Fehler = 0) wären, dürfte das Lagerspiel des Motors ebenfalls nur 0,16µm betragen. Kannst du das garantieren? Gegen Lagerspiel hilft übrigens auch keine Kalibrierung. Vielleicht merkst du jetzt, dass alle beteiligten mechanischen, optischen und elektronischen Komponenten hyperpräzise sein müssen, um deine Anforderungen zu erfüllen, und Hyperpräzision kostet nun mal hyperviele Euros :) Ich frage mich, wozu man überhaupt eine Drehbewegung mit einer Genauigkeit der Momentandrehzahl von 0,01% braucht. Kannst du mehr über dein Vorhaben erzählen? Muss wirklich die Momentandrehzahl (bzw. die mittlere Drehzal über den Zeitraum von 10ms) so genau sein, oder reicht es, diese Genauigkeit für die mittlere Drehzahl über einen längeren Zeitraum zu erreichen (wie bspw. bei den Zeigern einer Uhr)? Wenn du nicht arm werden möchtest, musst du deine Anforderungen drastisch reduzieren. Wenn die 0,01% für die Drehzahl tatsächlich fix sind, musst du die Messdauer von 10ms deutlich erhöhen. Da die erforderliche Messdauer von der Winkelbeschleunigung abhängt, kannst du versuchen, diese zu reduzieren, bspw. mittels einer ausreichend großen Schwungmasse: Uuu B. schrieb: > Stichwort Schallplattenspieler. Wie kommst du überhaupt auf die 10ms? Nachtrag: Ohne deine Anwendung genau zu kennen, könnte ich mir vorstellen, dass du mit einem dreiphasigen Synchronmotor (mit hoher Polzahl), einer dazu passenden elektronischen Ansteuerung (mit sinusförmigen (ggf. pulsweitenmodulierten) Signalen) und einer ausreichend großen Schwungmasse zum Ziel kommst. Dann brauchst du überhaupt keinen Encoder. Plattenspieler mit quarzgesteuertem Direktantrieb machen das auf ganz ähnliche Weise. Ihr Einsatzgebiet bietet allerdings den Vorteil, dass die Drehzahl des Plattentellers so gut wie keinen äußeren Einflüssen ausgesetzt ist. Vielleicht ist das in deiner (bisher noch geheimen) Anwendung ja ebenso.
:
Bearbeitet durch Moderator
Yalu X. (yalu) (Moderator) 30.09.2025 08:41 >Nachtrag: >Ohne deine Anwendung genau zu kennen, könnte ich mir vorstellen, dass du >mit einem dreiphasigen Synchronmotor (mit hoher Polzahl), einer dazu >passenden elektronischen Ansteuerung (mit sinusförmigen (ggf. >pulsweitenmodulierten) Signalen) und einer ausreichend großen >Schwungmasse zum Ziel kommst. Dann brauchst du überhaupt keinen Encoder. Diesen Denkfehler machen tatsächlich viele: Man könnte meinen, dass der Rotor eines Synchronmotors genau der Phase folgt. Das ist nur bei grobem Hinschauen so. Tatsächlich hängt der Differenzwinkel von der Last ab. Ist diese nicht konstant, ist auch der Winkel nicht konstant.
Christoph M. schrieb: > Ist diese nicht konstant, ist auch der Winkel nicht konstant. Da müsstest du einfach endlich einmal ein paar Details zur Anwendung rausrücken, um evtl. von den abgehobenen Anforderungen weg zu kommen. Christoph M. schrieb: > Das ist auf jeden Fall mal was handfestes. Dann siehst du sicher auch, dass Ende und Anfang in der Steigung nicht zusammen passen. Dein Fehler bei der Geschwindigkeitsmessung wird durch die Steigung bestimmt. Ste N. schrieb: > rgr_test_certificate.gif
:
Bearbeitet durch User
Christoph M. schrieb: > Yalu X. (yalu) (Moderator) > 30.09.2025 08:41 > >>Nachtrag: >>Ohne deine Anwendung genau zu kennen, könnte ich mir vorstellen, dass du >>mit einem dreiphasigen Synchronmotor (mit hoher Polzahl), einer dazu >>passenden elektronischen Ansteuerung (mit sinusförmigen (ggf. >>pulsweitenmodulierten) Signalen) und einer ausreichend großen >>Schwungmasse zum Ziel kommst. Dann brauchst du überhaupt keinen Encoder. > > Diesen Denkfehler machen tatsächlich viele: Man könnte meinen, dass der > Rotor eines Synchronmotors genau der Phase folgt. Das ist nur bei grobem > Hinschauen so. Tatsächlich hängt der Differenzwinkel von der Last ab. > Ist diese nicht konstant, ist auch der Winkel nicht konstant. Kein Denkfehler, sondern fehlender Input von deiner Seite. Genau aus diesem Grund begann ich den Absatz ja mit Yalu X. schrieb: > Ohne deine Anwendung genau zu kennen, ... Wenn die zu erwartende Last nicht bekannt ist, müsste man den Motor für ein praktisch unendliches Drehmoment auslegen, damit hätten wir eine weitere Komponente, die dein Budget sprengt ;-) Da du aber oben auf den Hinweis mit dem Plattenspieler angesprungen bist, vermutete ich, dass bei dir die Randbedingungen ganz ähnlich sind, d.h. die Last ist – nachdem der Motor seine Solldrehzahl erreicht hat – sehr klein und praktisch konstant, s. hier: Christoph M. schrieb: >>geht es hier um audiophile Hirnwixxerei? => Schallplatten laufen mit 33 >>U/min? > > Die scheinen tatsächlich eine ähnliche Drehzahl wie bei mir zu haben. > Welche Genauigkeit ist dort gefordert? Besser als meine? Vielleicht geht es bei deiner Anwendung ja um eine hochpräzise High-End-Salamischneidemaschine, bei der die erzeugten Scheibchen nur dann die von den Dreisternerestaurants vorgegebenen Anforderungen nur dann erfüllen, wenn das rotierendes Messer auf 0,01% genau mit der Drehzahl von 0,5/s läuft und auch durch ein paar Knochenfragmente in der Salami nicht im Geringsten abgebremst wird ;-)
:
Bearbeitet durch Moderator
Yalu X. (yalu) (Moderator) 30.09.2025 14:11 >Vielleicht geht es bei deiner Anwendung ja um eine hochpräzise >High-End-Salamischneidemaschine, bei der die erzeugten Scheibchen nur >dann die von den Dreisternerestaurants vorgegebenen Anforderungen nur >dann erfüllen, wenn das rotierendes Messer auf 0,01% genau mit der >Drehzahl von 0,5/s läuft und auch durch ein paar Knochenfragmente in der >Salami nicht im Geringsten abgebremst wird ;-) Ich finde es ja interessant, sich mit eher einfachen Formeln und Modellen dem Problem zu nähern und Du hast recht, es fehlen ein paar wichtige Angaben. Deshalb: Im Leerlauf braucht der Motor 0.5W und beim Schneiden des eher weichen Würstchens maximal 5W. Der Lastsprung wäre also knapp 5W beim Schneiden des Würstchens. Aus den Leistungen und der Drehzahl lassen sich die Drehmoment berechnen.
:
Bearbeitet durch User
Christoph M. schrieb: > Im Leerlauf braucht der Motor 0.5W und beim Schneiden des eher > weichen Würstchens maximal 5W. Wurstschneidemaschinen haben Umfangsgeschwindigkeiten von ca. 4m/s. Da dein Antrieb 0,5 U/s hat brauchst du ein Messer mit ca. 2,5m Druchmesser. Fertige das Messer aus Osmium ( Dichte 22,5 kg/dm³) um ein möglichst hohes Massenträgheitsmoment für einen ruhigen Lauf zu erreichen. (Preis von Osmium: 2080€/g - aber zum Budget schweigst du dich ja ebenfalls konsequent aus.) Salamiproblem gelöst?
Christoph M. schrieb: > Deshalb: Im Leerlauf braucht der Motor 0.5W und beim Schneiden des eher > weichen Würstchens maximal 5W. Der Lastsprung wäre also knapp 5W beim > Schneiden des Würstchens. Aus den Leistungen und der Drehzahl lassen > sich die Drehmoment berechnen. Nein, dazu müsste man die Leistungsabgabe kennen. Aber egal, der Hund liegt ganz woanders begraben: LastSPRUNG. Springende Lasten und extreme Genauigkeitsanforderungen beißen sich, insbesondere dann, wenn das gesamte System auch noch billig sein soll. Ohne weitere Informationen (Zeitdauer des Sprungs, Motorparameter, Trägheitsmoment der rotierenden Teile usw.) lässt sich das zwar nicht bewerten, aber deine bisherigen Ausführungen lassen vermuten, dass du die Problematik nicht in ihrer Gesamtheit verstanden hast, so dass dein Vorhaben höchstwahrscheinlich scheitern wird. Selbst mit einem hyperpräzisen Encoder ist die Aufgabe noch lange nicht gelöst. Am besten gehst du einen Schritt zurück, um einen besseren Überblick über das Gesamtproblem zu bekommen, und überlege dann, - ob, das Problem nicht auf gänzlich andere Weise gelöst werden kann, - falls nicht, ob du die Genauigkeit von 0,01% wirklich brauchst, - falls ja, ob diese Genauigkeit nicht auf andere Weise erreicht werden kannst. Mach dir auch Gedanken über die erforderliche Dynamik des Antriebs, die dafür erforderliche Leistungselektronik, den möglichen Einsatz von Schwungmassen usw. Da du als Einziger in diesem Thread die Anwendung kennst, ist es an dir, eine passende Lösung zu finden. Findest du sie nicht, solltest du dich einfacheren Problemen zuwenden.
:
Bearbeitet durch Moderator
>Christoph M. schrieb: >> Deshalb: Im Leerlauf braucht der Motor 0.5W und beim Schneiden des eher >> weichen Würstchens maximal 5W. Der Lastsprung wäre also knapp 5W beim >> Schneiden des Würstchens. Aus den Leistungen und der Drehzahl lassen >> sich die Drehmoment berechnen. von Yalu X. (yalu) (Moderator) 01.10.2025 09:40 >Nein, dazu müsste man die Leistungsabgabe kennen. Ok, ich war wieder zu unpräzise: Die Werte beziehen sich auf die mechanische Leistungsabgabe. Die Drehzahl soll wie schon oben erwähnt konstant 0.5 U/sec betragen.
:
Bearbeitet durch User
Christoph M. schrieb: > Du hast recht, es fehlen ein paar > wichtige Angaben. > Deshalb: Im Leerlauf braucht der Motor 0.5W und beim Schneiden des eher > weichen Würstchens maximal 5W. Der Lastsprung wäre also knapp 5W beim > Schneiden des Würstchens. Ähhm. Warte mal kurz. Du willst also ein "eher weiches Würstchen" schneiden und dabei (und im Leerlauf!) darf die (Motor?) Drehzahl von 0.5/s (30rpm) um nicht mehr als 0.01% schwanken? Bist du sicher daß du hier richtig bist? Nicht eher ICD F22? IANAD
Udo S. schrieb: > So langsam frage ich mich ob der Thread nur Verarschung ist. Da bist du nicht der einzige. Andererseits ist der Nutzer "mchris" seit dem 01.04.2018 angemeldet und hat über 1500 Beiträge verfaßt. Es sei denn, sein Enkel/Neffe (wasauchimmer) hat Freigang aus der Klapse und benutzt jetzt seinen PC ...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.