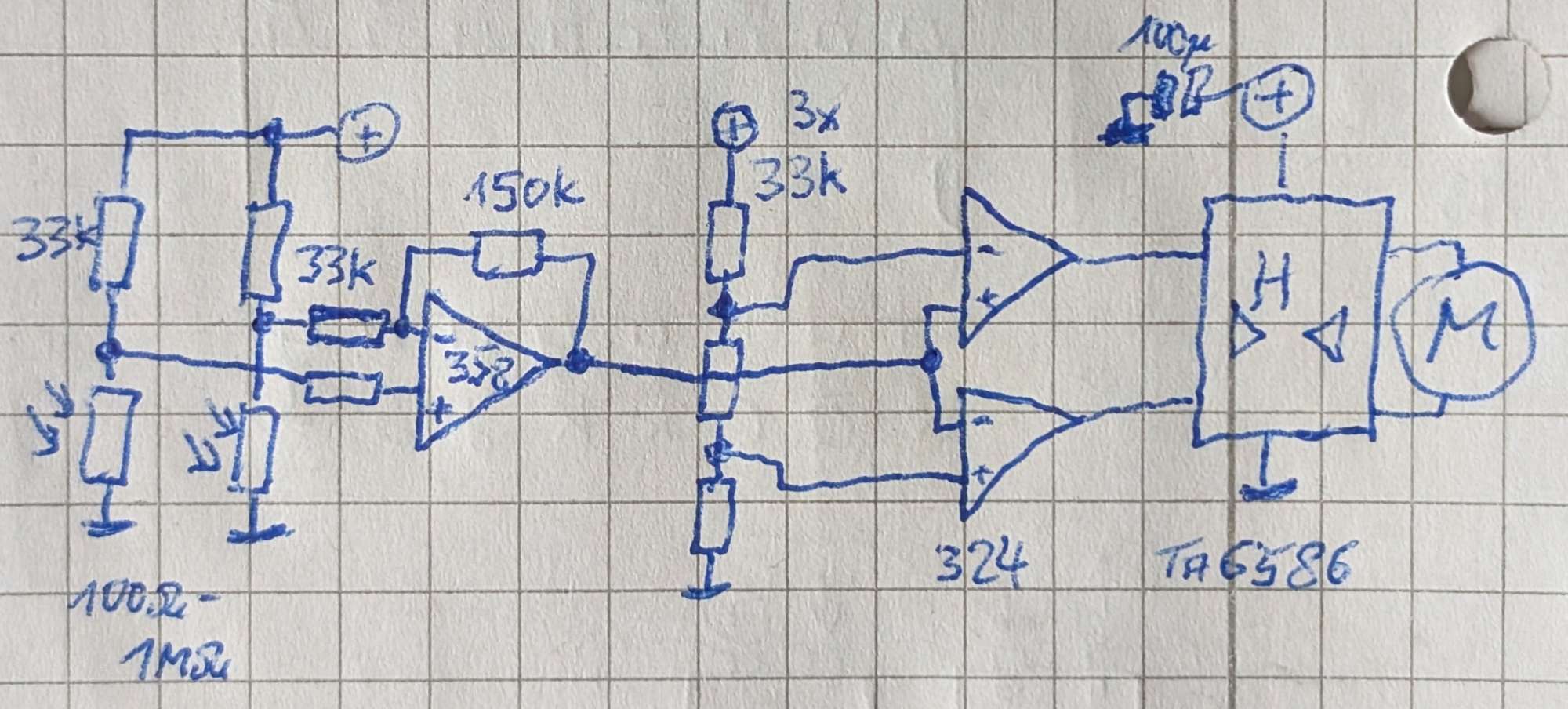
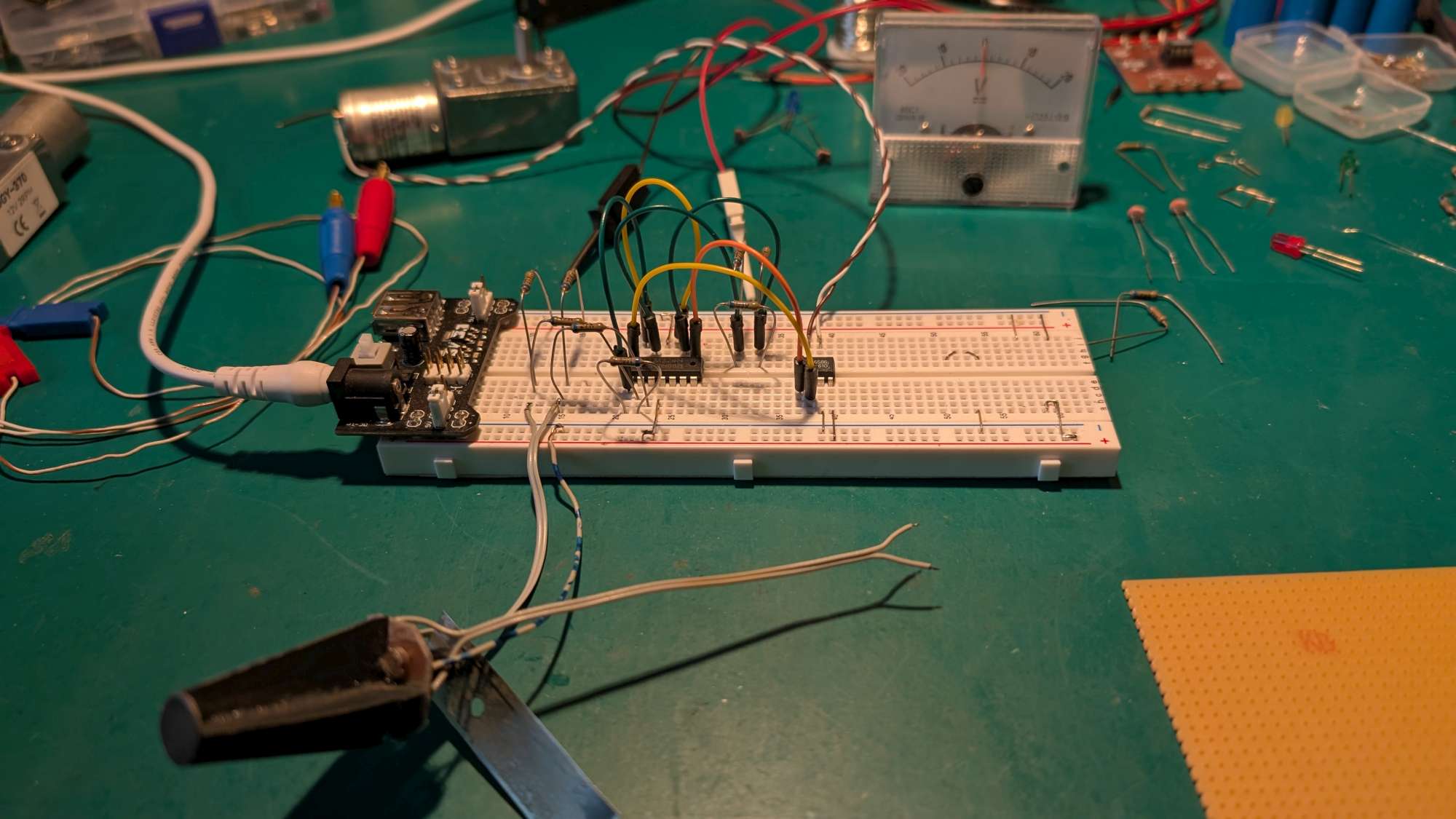
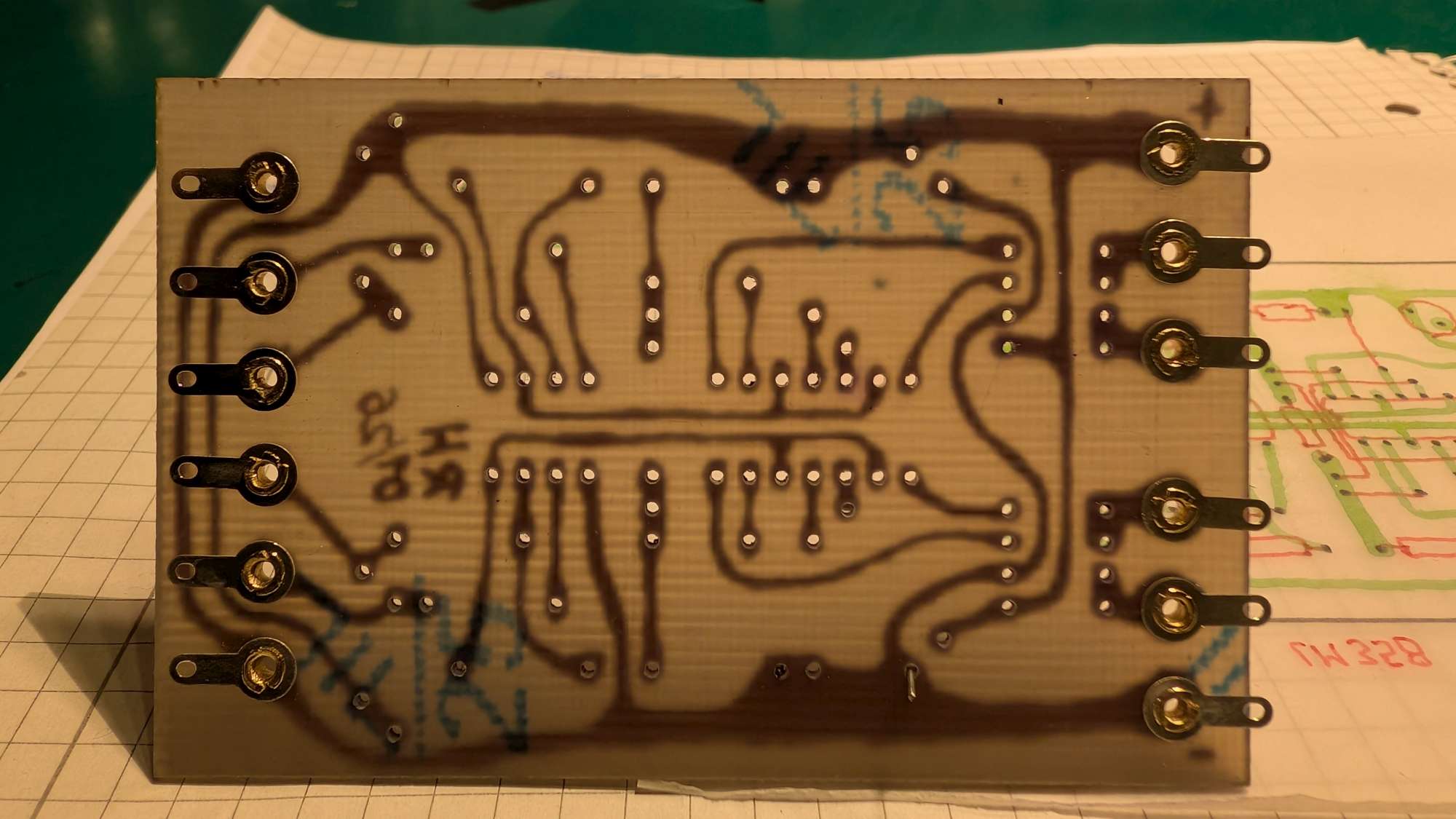
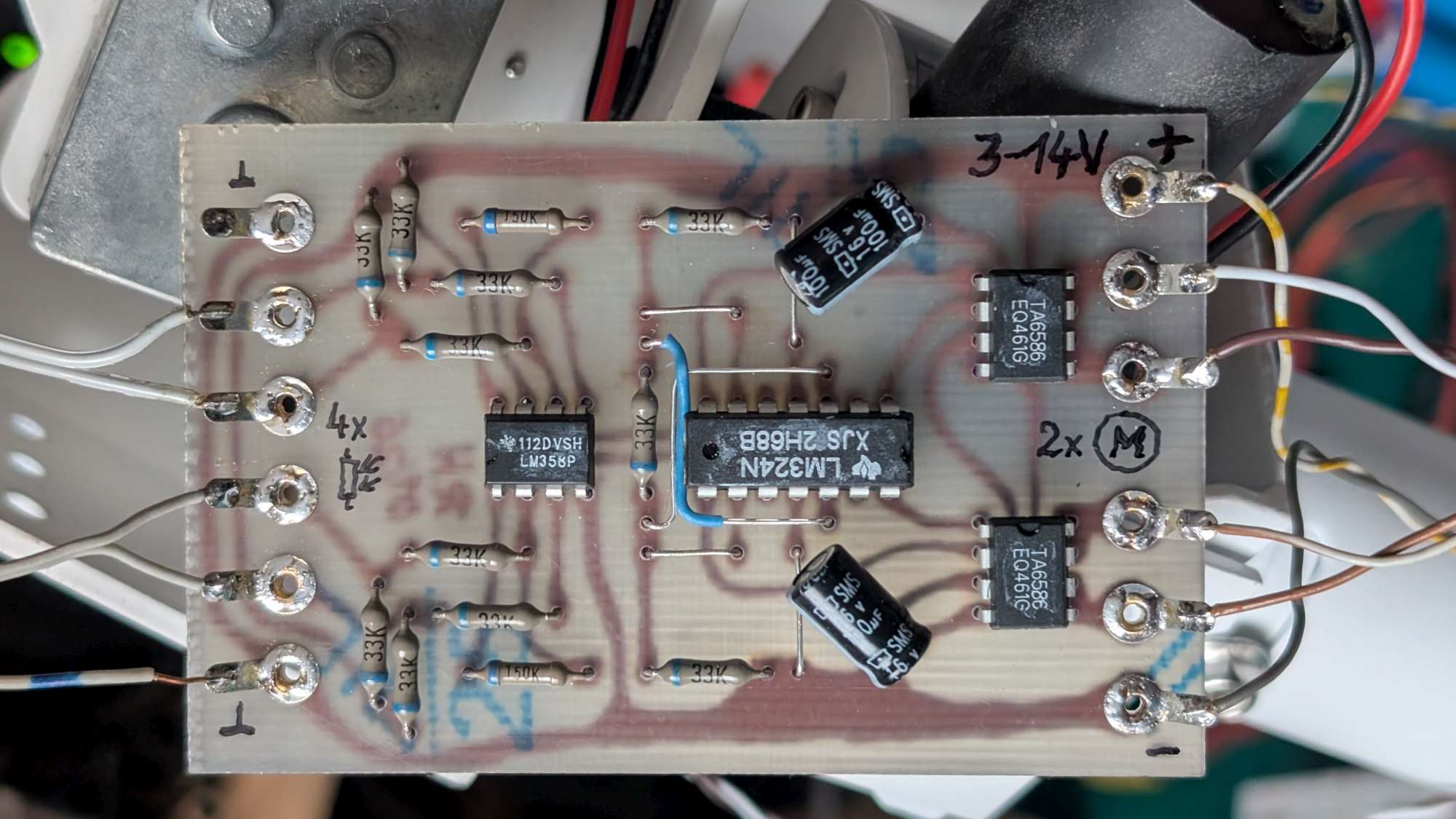
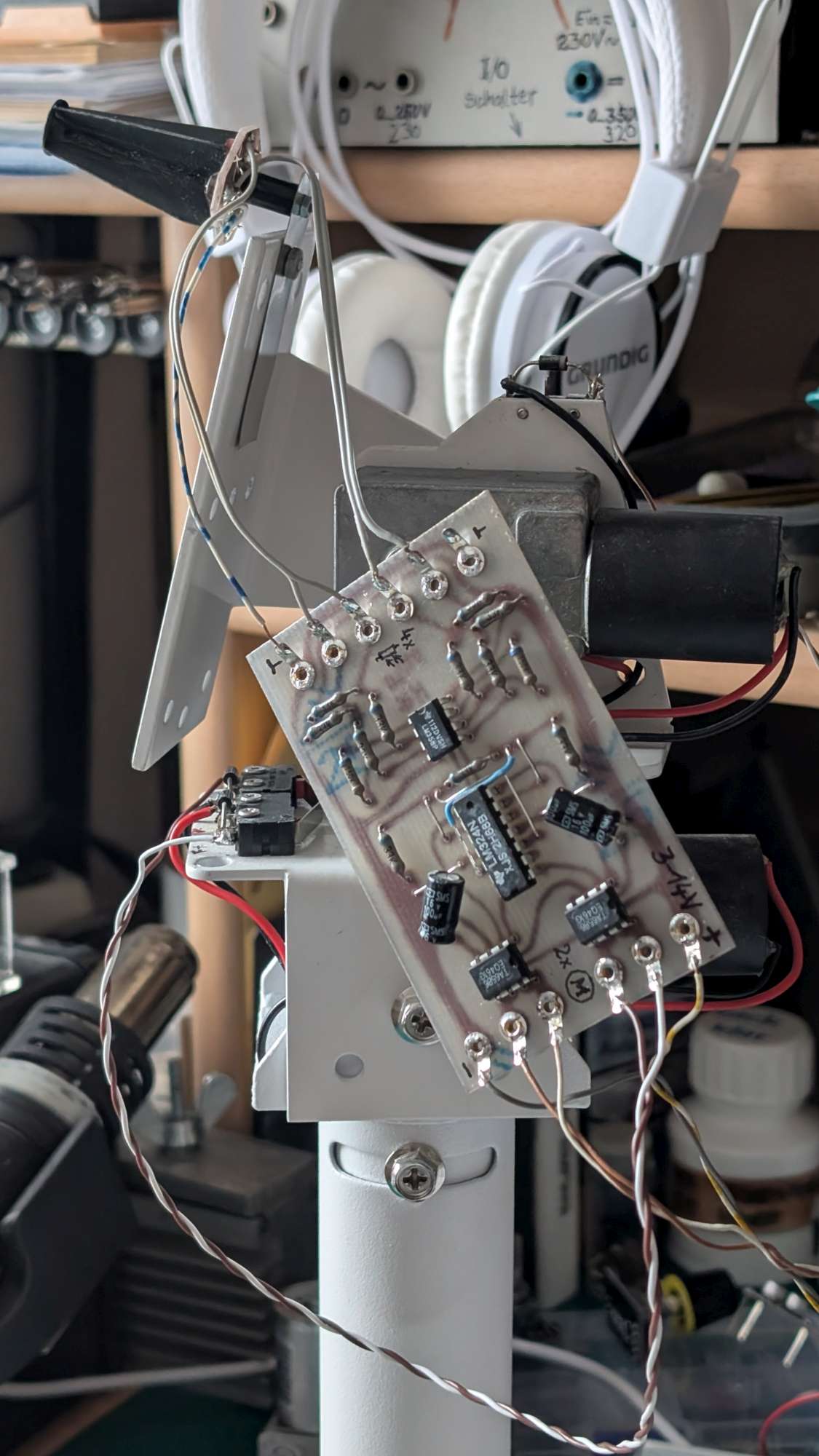
Ich verstehe nicht weshalb für so einfache Steuerungen wie die Sonnennachführung ein Rechner nötig ist und wie man Fotowiderstände, die bei Lichteinfall unter 100 Ohm erreichen, voll in die Speisespannung schalten kann. Zudem fehlen oft die Hysteresefunktionen in den Schaltungen um ein ständiges Nachregeln auszuschließen. Auch wollte ich Spannungsmäßig mit nur einer Li-Ion Zelle auskommen. Zudem ermöglichen moderne H-Brücken ICs einen sehr einfachen Schaltungsaufbau. 01.jpg der 150KOhm Und der mittlere 33KOhm Widerstand sind für die Hysterese nötig 02.jpg Testaufbau zur Minimierung des Aufwandes 03.jpg die geätzte und mit Ösen versehene Leiterplatte 04.jpg bestückt sieht es sehr übersichtlich aus – die Beschaltung ist problemlos – notfalls einfach die Motoranschlüsse tauschen 05.jpg Funktionsprobe Diese Schaltung ermöglicht auch ohne eine Programmierung eines µPs oder aufwendige Transistorschaltungen zu einem schnellen Ergebnis zu kommen. Die eingesetzte H-Brücke soll bis 5A Strom treiben können - bei bis zu 14V. Auch die Schaltung eines Opas hat manchmal Vorteile...
:
Bearbeitet durch User
Falls es Wolken gibt oder Spiegelungen kann es zu komischen Effekten kommen. Mit ein uC kannst du dir die GPS Position und Zeit holen. Berechnen wo die Sonne ca stehen soll. Mit eine Photosensor kannst du dann Diagnose machen, wie zum Beispiel es ist zu wenig Licht, vermutlich durch Wolken. Oder noch komplexere Themen. Ja nach dem was du erreichen möchtest kann eine einfache Schaltung oder eine komplexe Schaltung die Lösung sein. Soetwas wie eine Lösung was immer überall tut, gibt es nicht.
> einfacher analoger Sonnenfolger
Mein Opa hätte es auch so gemacht.
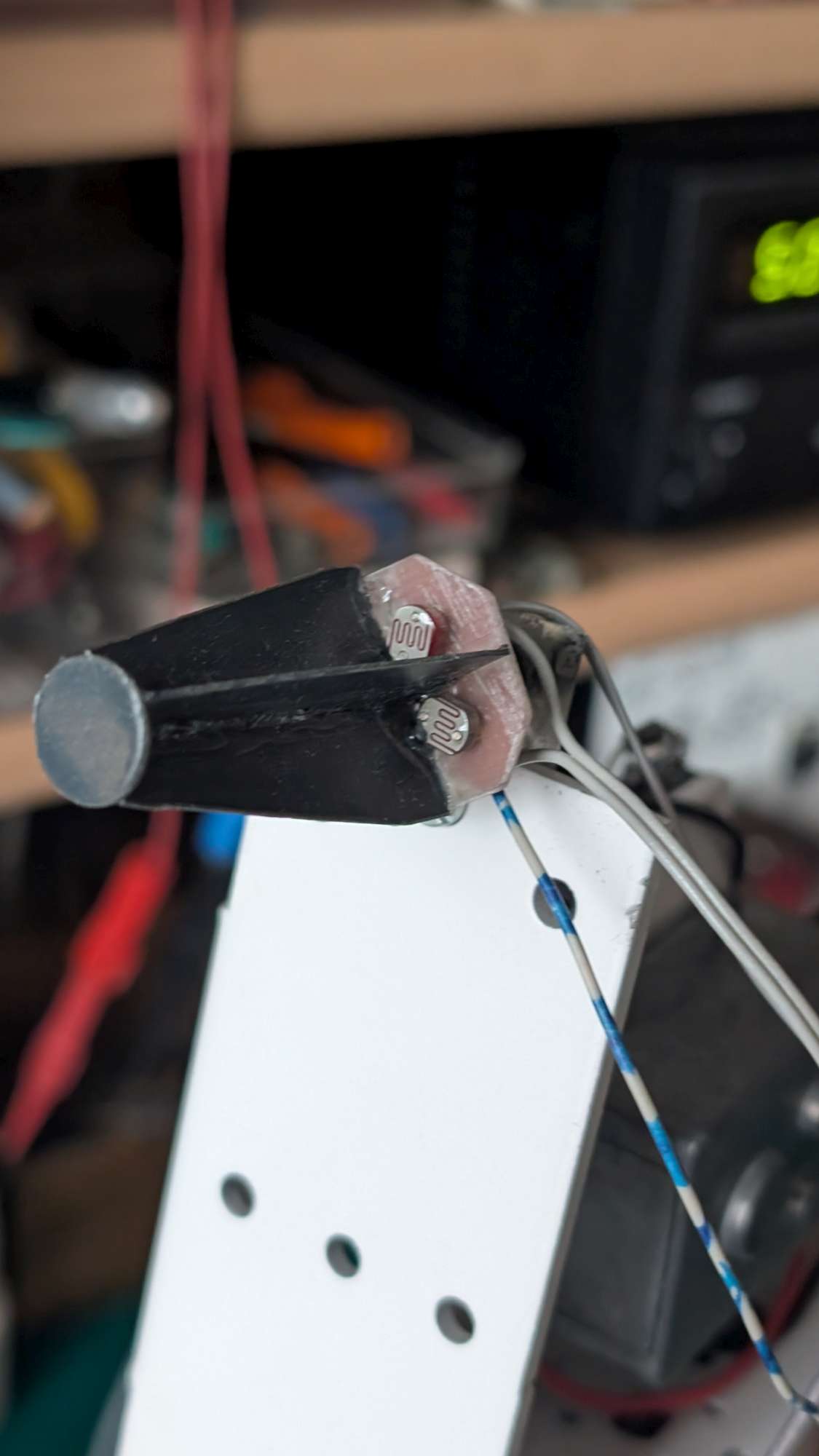
Roland H. schrieb: > Ich verstehe nicht weshalb... Ich verstehe nicht weshalb du zweimal den gleichen Text geschrieben hast? Außerdem verstehe ich nicht weshalb du noch einen zusätzlichen LM358 mit aufs Board gebastelt hast, obwohl der LM324 bereits 4 Operationsverstärker enthält? Dann würde mich interessieren, wie die mechanische Ausrichtung der Fotowiderstände bewerkstelligt wurde und ob sie durch einen Sichtschutz voneinander entkoppelt wurden. Auf dem letzten Foto ist schon etwas davon zu erkennen. Vielleicht könntest du davon noch einmal ein Extrafoto beisteuern. Nachtrag: Ich sehe gerade, dass du sowohl für Horizontal als auch für Vertikal eine zweimotorige Variante gebaut hast. Das erklärt dann natürlich auch warum du noch einen zusätzlichen LM358 Dual-OPV dazu nehmen musstest.
:
Bearbeitet durch User
Was ist denn das mittlere für ein Spezialwiderstand bei denen, wo du "3*33k" hingeschrieben hast? Hat der einen Mittelabgriff?
Marcel V. schrieb: > Außerdem verstehe ich nicht weshalb du noch einen zusätzlichen LM358 mit > aufs Board gebastelt hast, obwohl der LM324 bereits 4 > Operationsverstärker enthält? Er hat die Schaltung nur einmal gezeichnet, sie ist auf der Platine aber zweimal aufgebaut. Es werden also 6 OpAmps verbraten.
Roland H. schrieb: > der 150KOhm Und der mittlere 33KOhm Widerstand sind für die Hysterese > nötig So wie gezeigt erzeugt die Schaltung keine Hysterese, sondern es wird eine Verstärkung eingestellt. Für eine Hysterese müssten die 150k an die nicht invertierenden Eingänge des LM358.
Roland H. schrieb: > Zudem fehlen oft die Hysteresefunktionen in den > Schaltungen um ein ständiges Nachregeln auszuschließen. Ich sehe in Deinem Schaltplan keine Hysterese Roland H. schrieb: > Ich verstehe nicht weshalb für so einfache Steuerungen wie die > Sonnennachführung ein Rechner nötig ist Weil: Andras H. schrieb: > Falls es Wolken gibt oder Spiegelungen kann es zu komischen Effekten > kommen. Was passiert wenn Morgens um 6 die Sonne scheint, dann den ganzen Tag bewölkt ist und abends um 7 die Wolken verschwinden... Klar man kann über den mechanischen Aufbau des Sensors einiges Abfangen, aber egal wie Du dich anstellst, es gibt immer einen Totpunkt oder eine Stelle ab der nicht das passiert was du willst. Wenn du Pech hast, reagieren deine LDRs bereits auf den Unterschied Wolke/blauer Himmel. Oder auf den Mond. An Sensoren/Taster für Endanschläge hast Du gedacht? Denn im Fehlerfall wird sich das Teil so lange drehen bis der Akku leer oder das Kabel aufgerollt ist... Ich habe zu dem Thema einiges durch, so einfach wie Deine Lösung scheint ist sie nicht. Mal ein paar Tipps: - Unbedingt den Drehbereich mittels Sensoren/Taster/etc eingrenzen. - Rückwarts fahren muss das Modul nur bei Nacht -> Helligkeit auswerten - Vorwärts fahren muss das Modul nur am Tag bei Sonne.... Damit kann man die meisten Probleme erschlagen. Tja und mit einem Mikrocontroller: könntest Du die ganzen OPVs, Widerstände, etc ganz weglassen, würdest viel weniger Strom brauchen und könntest sogar noch einen Zeitgesteuerten Notbetrieb einbauen.... (Der Microcontroller läuft übrigens ab 1.8V, deine OPVs auch?)
Arno R. schrieb: > So wie gezeigt erzeugt die Schaltung keine Hysterese, sondern es wird > eine Verstärkung eingestellt. Für eine Hysterese müssten die 150k an die > nicht invertierenden Eingänge des LM358. Durch die beiden Logikeingänge des TA6586 und den mittleren 33k hat er sowas wie einen Totbereich. Allerdings sollte man mal schauen ob die Logikeingänge beliebige Pegel zwischen Hi und Lo abkönnen.
Andreas M. schrieb: > Tja und mit einem > Mikrocontroller: könntest Du die ganzen OPVs, Widerstände, etc ganz > weglassen, würdest viel weniger Strom brauchen und könntest sogar noch > einen Zeitgesteuerten Notbetrieb einbauen.... (Der Microcontroller läuft > übrigens ab 1.8V, deine OPVs auch?) Allerdings braucht er dann Servomotoren, oder eine sonstige Rückmeldung der aktuellen Winkelstellung. Bei seiner Lösung braucht er nur DC Motoren, Der Regelkreis ist über die Helligkeitssensoren geschlossen.
Udo S. schrieb: > Durch die beiden Logikeingänge des TA6586 und den mittleren 33k hat er > sowas wie einen Totbereich. Das mag ja sein, aber meine Antwort bezog sich auf die Aussage des TO: Roland H. schrieb: > der 150KOhm Und der mittlere 33KOhm Widerstand sind für die Hysterese > nötig und das stimmt eben nicht. So wird keine Hysterese erzeugt. Außerdem ist die Verstärkung, die in der oben gezeigten Schaltung auftritt vom Photowiderstand am invertierenden Eingang abhängig. Es ergibt sich daher ein unterschiedliches Verhalten der beiden Photowiderstände.
Andreas M. schrieb: > Tja und mit einem Mikrocontroller könntest Du die ganzen OPVs, > Widerstände, etc ganz weglassen Wir haben damals in der Schule ein Modellauto gebaut, das einer vorausgegangenen Taschenlampe automatisch gefolgt ist. Eine Person geht mit der Taschenlampe voraus und das Auto fährt, wie an einer Leine gezogen, im leichten Zick-Zackschritt hinterher. Das Auto bestand aus einer Grundplatte, 2 Getriebemotoren und einer 4,5V Flachbatterie. Ein Motor rechts und einer links. Vorne und hinten jeweils eine Stützrolle. Als Elektronik wurden einfach nur 2 LDR-Widerstände, 2 Transistoren und zwei Relais verbaut, fertig.
Andreas M. schrieb: > - Rückwarts fahren muss das Modul nur bei Nacht -> Helligkeit auswerten > - Vorwärts fahren muss das Modul nur am Tag bei Sonne.... Das gilt aber nur für den Azimut. Die Elevation muss tagsüber in beiden Richtungen folgen und Nachts ist Ruhe.

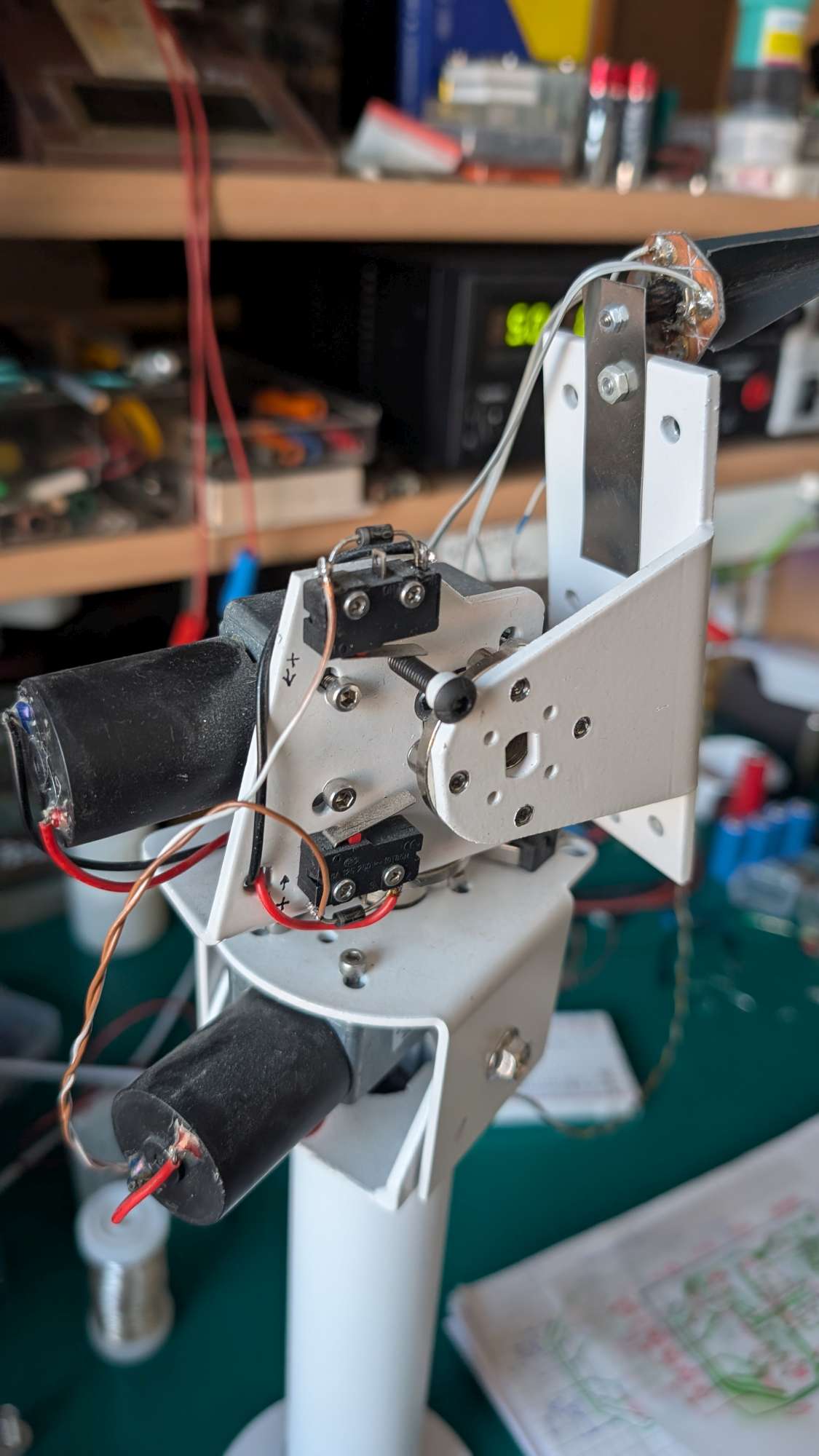
Diesen Sensoraufbau habe ich bereits seit ca. 20 Jahren rumliegen und damals schon erste Schaltungen aufgebaut, doch es fehlten die Solarpanele... Da ich zum Poolwasser aufheizen die Sonnenstrahlen nutze, ist es wichtig die obere, bis zu 50° heiße Wasserschicht unter der schwarzen Folie, nach unten zu verteilen, um nachts nicht wieder die komplette Wärme zu verlieren. Die Steuerung, die die Temperatur der oberen und unteren Waserschicht vergleicht, kommt mit einer einzigen Li-Ion-Zelle aus und schaltet nur die Umwälzpumpe bei einer Temperaturdifferenz ein. Um nicht weitere Zellen zu verlieren hab ich eine kleine Solarplatine mit angeschlossen die jedoch nicht sehr effektiv ist (der Einfallswinkel ist meist sehr ungünstig). Dies ist der Grund für diese Steuerung. und nochmal zum mitschreiben... Die Programmierung eines µPs erfordert ein Grundwissen dazu und die nötige Technik. Für junge Leute, die diese Möglichkeiten bereits in der Schule behandelt haben ist es gewiß keine Herausforderung, doch es gibt ja auch ältere, die µPs als rotes Tuch sehen und lieber übersichtliche Technik nutzen wollen, die sie auch verstehen und Fehler beheben können. Einen Fehler an einen µP zu finden ist wesentlich aufwendiger als in so einer Schaltung.
:
Bearbeitet durch User
Angehängte Dateien:
-

Solarpark.jpg
200 KB

Andras H. schrieb: > Falls es Wolken gibt oder Spiegelungen kann es zu komischen Effekten > kommen. Hier in der Gegend wurde vor langer Zeit mal ein Solarpark mit drehbaren Modulen installiert. Die standen mit der ersten (dezentralen) Positionssteuerung bei bewölktem Himmel kreuz und quer. Das sah dann doch sehr zufällig aus. Nach 5 Jahren wurde dann auf eine Synchronisierung zur Sonnenlaufbahn umgestellt. Das hat sich offenbar bewährt... Beim daneben aufgebauten Solarpark wurden die inzwischen kostengünstigeren Module dann wie heute üblich fest installiert.
Bei einem Park mit vielen Modulen sehe ich es auch als sinnvoll die Module gleich zu schalten, doch der Stand eines einzelnes Panel interessiert niemanden. Zudem kann die analoge Steuerung wesentlich feinfühliger auf minimale Sonneneinstrahlung abgestimmt werden. Ein µP hat in der Regel durch den integrierten A-D-Wandler eine Spannungsauflösung bis 1024 und ist damit einer OPV-Vergleichsschaltung weit unterlegen.
Angehängte Dateien:
-

8.jpg
140 KB
Die Endschalter sind hier gut sichtbar... Die Hysterese für den Motorstop kann mit dem mittleren der 3 Widerstände, die einen 555 nachempfinden, leicht eingestellt werden. Die Rückführung über den 1.OPV begrenzt die Empfindlichkeit und ermöglicht erst die Hysteresefunktion. Bei einem Park mit vielen Modulen sehe ich es auch als sinnvoll die Module gleich zu schalten, doch der Stand eines einzelnes Panel interessiert niemanden. Zudem kann die analoge Steuerung wesentlich feinfühliger auf minimale Sonneneinstrahlung abgestimmt werden. Ein µP hat in der Regel durch den integrierten A-D-Wandler eine Spannungsauflösung bis 1024 und ist damit einer OPV-Vergleichsschaltung weit unterlegen.
:
Bearbeitet durch User
Dieter W. schrieb: > Das gilt aber nur für den Azimut. Die Elevation muss tagsüber in beiden > Richtungen folgen und Nachts ist Ruhe. Je nach dem, wie hoch die Genauigkeitsanforderungen sind, kann man sich den zweiten Motor eventuell ganz sparen und muss die zweite Achse nur alle paar Wochen nachstellen, falls das Ding der Sonne und nicht irgendwelchen Wolken folgen soll.
Eigentlich ist ein analoger Sonnenfolger in der heutigen Zeit Quatsch! Da die Erde seit Jahrmillionen relativ konstant um die Sonne kreist, lässt sich der Sonnenstand unabhängig von den Wolken wunderbar berechnen. Dazu muss ich nur den Ort und die Uhrzeit wissen, um meine Geräte auszurichten. Passende Programme bietet das Internet. Wenn ich einen WLAN-Anschluss habe, bekomme ich diese Daten in Echtzeit aus dem Netz. Dann kann ich meine Servos entsprechend steuern. Die brauchen nicht mal genau zu sein, 1-2° Abweichung reichen meist. Da genügt ein kleiner µC (ESP32-S3 z.B), der die meiste Zeit schläft, alle paar Minuten aufwacht und die Servos entsprechend nachstellt. Digitale Servos haben wegen der besseren Selbsthemmung weniger Stromverbrauch. Die Rückmeldung erfolgt über Beschleunigungssensoren.
Wenn mich nicht alles täuscht, habe ich diesen Beitrag in dem analogen Teil veröffentlicht. Ein µP, so angesagt und verlockend wie er auch sei, ist jedoch immer digital. Dazu kommt das er programmiert werden muß und je nach dem µP sind entsprechend aufwendige Programme erforderlich um dies zu tun. Ich jedenfalls finde es viel einfacher eine analoge Lösung für eine einfache Steuerung zu erarbeiten als mich Tagelang mit der Programmierung von µPs zu beschäftigen bis sie endlich das machen was sie sollen, zudem kommt noch die Reparaturfreundlichkeit analoger Schaltungen. Streikt ein µP ist meist guter Rat teuer und der Schrottkübel nahe - ein halbes Jahr später ist das Programm verschwunden, der µP veraltet und nicht mehr lieferbar oder der Macher des Teiles bei den Ahnen. Schnell noch einmal Zur Hysteresefunktion der Schaltung. Als alter Elektriker, der mit den ersten Transistoren aufgewachsen ist, mag ich analoge Schaltungen. Sie sind leicht zu verstehen und zu beeinflussen. Die 3 Kettenwiderstände zwischen der Betriebsspannung bilden einen Spannungsteiler, der die Spannung drittelt und mit den Widerstandsgrößen ist er einfach anzupassen. Die 2 folgenden OPVs nutzen diese Teilspannungen um die Triggerschwellen aufzubauen, genau wie bei einem 555 Timer IC. Da der verstärkende und vergleichende Eingangs-OPV jedoch beim Umkippen des Spannungsverhältnisses zwischen den Fotowiderständen einen schleichenden Übergangswert generieren muß, um diesen Triggerpegel nutzen zu können, ist es nötig eine Verstärkungsbegrenzung (z.B. 150 Ohm) einzufügen. Erst damit wird ein allmählicher Spannungsanstieg möglich. Die Empfindlichkeit ist somit durch die Anpassung des Rückkoppelwiderstandes und auch durch den Spannungsteiler möglich. Die H-Brücken in dem ICs, mag es ein TB6612, TC1508, L9110 oder wie hier ein TA6586 sein, arbeiten alle gleich. Ein einzelner H-Pegel schaltet bereits den entsprechenden H-Brückenpfad auf das + Potential um und somit läuft der Motor an. Nur der TB6612 benötigt noch zusätzliche H-Pegel an den Steuereingängen. Der Unterschied ist nur die maximale Spannung und Strombelastung der ICs und der L9110 ist nur für einen Motor ausgelegt.
:
Bearbeitet durch User
Roland H. schrieb: > ich mag analoge Schaltungen... Alles präzise erklärt und genauso sehe ich das in diesem Fall auch!
Roland H. schrieb: > Dazu kommt das er programmiert werden muß und > je nach dem µP sind entsprechend aufwendige Programme erforderlich um > dies zu tun. Ich jedenfalls finde es viel einfacher eine analoge Lösung > für eine einfache Steuerung zu erarbeiten als mich Tagelang mit der > Programmierung von µPs zu beschäftigen bis sie endlich das machen was > sie sollen, zudem kommt noch die Reparaturfreundlichkeit analoger > Schaltungen. Die Erde dreht sich seit Jahrmillionen so gleichmäßig um ihre Achse, dass du danach die Uhr stellen kannst. Einzig störend ist vielleicht, dass die Erde nicht auf einer Kreisbahn um die Sonne läuft. Ohne deine Genauigkeitsanforderungen zu kennen, ist das hier allerdings alles etwas müßig. Roland H. schrieb: > Ich verstehe nicht weshalb für so einfache Steuerungen wie die > Sonnennachführung ein Rechner nötig ist ... ... damit das Ding bei gemischtem Wetter nicht Amok läuft. Roland H. schrieb: > Auch wollte ich Spannungsmäßig mit nur einer Li-Ion Zelle auskommen. Hast du bei deinem Spannungsteiler für den Fensterkomparator berücksichtigt, dass sich der LM324 mit positiven Ausgangssignalen etwas schwer tut, wenn es darum geht, an die Versorgungsspannung heran zu kommen?
:
Bearbeitet durch User
Noch etwas zur Anfertigung der Leiterplatte ohne PC !!! - für Neueinsteiger - ... Die Teile werden nach Verdacht auf eine Lochrasterplatte gesteckt (Teile mit großen Löchern durch etwas geeignetes ersetzen). Wenn alle Teile günstig angeordnet sind werden die genutzten Löcher mittels eines wasserfesten Faserschreibers markiert. Jetzt gilt es die markierten Löcher auf Transparentpapier zu übertragen um die Bauteile und mögliche Leiterzugführungen mit farbigen Filzstiften zu zeichnen (ich nutze rote Fineliner für die Bauteile und lindgrüne Filzstifte für die Leiterzüge). Jetzt werden nötige Korrekturen und Brücken sichtbar. Paßt alles wird eine Leiterplatte auf Größe geschnitten und mit Kreppband unter die Lochplatte geklebt. So kann mittels eines 1mm Bohrers die Platine durch die markierten Löcher im gleichmäßigen Raster gebohrt werden. Nach dem kontrollieren ob alle Löcher gebohrt wurden, wird mit einen feinen Schleifgummi - 400ter Wasserschleifpapier geht auch, die Kupferfläche entgratet und gesäubert. Fingerabdrücke sind jetzt störend, denn jetzt werden die Leiterzüge mit eingefärbten Abdecklack und einen sehr feinen Pinsel aufgezeichnet. Zum einfärben eignet sich idealerweise Methylviolett, das auch in Kopierstiften oder blauen Kuliminen genutzt wird und sich sehr gut in Ethanol auflöst. Den Lack selbst habe ich noch aus DDR-Zeiten und er ist sogar lötbar und noch flüssig. Nagellack soll aber auch gehen. Nach der Trocknung der aufgezeichneten Leiterzüge wird ein dünner lackierter Spulendraht durch zwei Löcher gezogen und hinten zusammengedreht um die Platine anheben zu können. Jetzt wird geätzt. Ich habe seit über 30 Jahren eine Glasschale mit Eisen-3-Chlorid Lösung, die durch den luftdichten Deckel noch immer nutzbar ist und im kalten Zustand bis zu einer 3/4 Stunde, auf der Heizung nach 15 Minuten die Leiterplatte ätzt. Die Platine wird einfach auf die braune Brühe vorsichtig schräg aufgesetzt um keine Luftblasen einzuschließen und keine Brühe auf die Platine zu bekommen, damit sie nicht untergeht. Die Platine schwimmt auf dieser Brühe und an dem Draht ist sie leicht anzuheben und bei Glasfasermaterial ist sogar der Fortschritt des Ätzens sichtbar. Bei 2-4 kleinen Platten pro Jahr ist der Ätzansatz sehr lange nutzbar. Nach dem Ätzen die Platine abwaschen, mit Ethanol vom Abdecklack befreien und mit einer Kolophoniumlösung (FLUX TK83) dünn einstreichen - fertig.
:
Bearbeitet durch User
Rainer W. schrieb: > Die Erde dreht sich seit Jahrmillionen so gleichmäßig um ihre Achse, > dass du danach die Uhr stellen kannst. Einzig störend ist vielleicht, > dass die Erde nicht auf einer Kreisbahn um die Sonne läuft. Die horizontale Bewegung um die Vertikalchse kann man nach der Uhr stellen, die muss genau 360° in 24 Stunden laufen. Die Ellipse ist nicht signifikant und macht sich nicht bemerkbar. Und das ist jeden Tag gleich. Vielleicht wird das Projekt etwas einfacher, wenn man nur die vertikale Bewegung mit den Photosensoren steuert. Dann kann die Steuerung bei Amoklauf sich schneller wieder fangen, weil sie nur nach oben und unten suchen muss und grundsätzlich immer zur Sonne gerichtet ist. Dann sind die Amokläufe auch nicht so schlimm.
Rainer W. schrieb: > Hast du bei deinem Spannungsteiler für den Fensterkomparator > berücksichtigt, dass sich der LM324 mit positiven Ausgangssignalen etwas > schwer tut, wenn es darum geht, an die Versorgungsspannung heran zu > kommen? Der Test beweist das sie funktioniert und die Sonne mag sich auch gleichmäßig drehen, das ändert nichts an der Tatsache das die Steuerung ohne Mikrorechner für die meisten Menschen einfacher zu realisieren ist als die Programmierung selbigen und die Fehlersuche bei einer defekten Steuerung ebenfalls. Zudem muß sich das Panel nicht unbedingt auf die Sonne ausrichten, bei Wolken ist es sogar sinnvoller auf den helleren Teil des Himmels auszurichten.
Hagen schrieb: > Die horizontale Bewegung um die Vertikalchse kann man nach der Uhr > stellen, die muss genau 360° in 24 Stunden laufen. Die Ellipse ist nicht > signifikant und macht sich nicht bemerkbar. Und das ist jeden Tag > gleich. Da täuscht du dich. Es geht nicht um den Sterntag (etwa 23h56m), sondern um den wahren Sonnentag, der eben nicht genau 24 Stunden lang ist. Die Ellipsenform der Erdbahn und die Achsenneigung der Erde machen sich als Zeitgleichung bemerkbar. https://de.wikipedia.org/wiki/Zeitgleichung Die täglichen Abweichungen der wahren Tageslänge akkumulieren sich und dadurch eiert der Durchgang der Sonne im Lauf des Jahres um etwa eine halbe Stunde. Und es ist schon mal gar nicht die horizontale Bewegung, wenn dann ist es die Bewegung bezogen auf die Erdachse. Und solange du nicht an einem der Pole stehst, sind das verschiedene Dinge. Roland H. schrieb: > ... und die Sonne mag sich auch gleichmäßig drehen ... Eine Drehung der Sonne dauert ganz grob einen Monat. Die interessiert deine Sonnennachführung gar nicht. Die Nachführung muss hauptsächlich die Drehung der Erde kompensieren.
:
Bearbeitet durch User
Udo S. schrieb: > Allerdings braucht er dann Servomotoren, oder eine sonstige Rückmeldung > der aktuellen Winkelstellung. > Bei seiner Lösung braucht er nur DC Motoren, Der Regelkreis ist über die > Helligkeitssensoren geschlossen. Nein braucht er nicht. Die Geschwindigkeit des Motors ist bekannt. Ich sprach nicht umsonst von "Notbetrieb". Für den Fall, das die Sonne scheint hat der MC ja die Sensoren. Roland H. schrieb: > Die Hysterese für den Motorstop kann mit dem mittleren der 3 > Widerstände, die einen 555 nachempfinden, leicht eingestellt werden. Das ist keine Hysterese sondern ein Totbereich. Eine Hysterese erreicht man durch positive Rückkopplung. Da die Sonne sich aber eher selten rückwärts bewegt, bringt ein Totbereich nichts. Die Schaltung wird immer an der Grenze zur "Westdrehung" hängen. Roland H. schrieb: > Zudem kann die analoge Steuerung wesentlich > feinfühliger auf minimale Sonneneinstrahlung abgestimmt werden. Ein µP > hat in der Regel durch den integrierten A-D-Wandler eine > Spannungsauflösung bis 1024 und ist damit einer OPV-Vergleichsschaltung > weit unterlegen. Das will man gar nicht. So wie deine Schaltung gebaut ist, wird der Motor im Schlechtfall je nach physikalischer Trägheit des Gesamtaufbaus im einstelligen Minutenrhythmus oder gar noch schneller takten. Moderne UCs haben übrigens nicht nur eingebaute OPVs sondern meist auch noch Komparatoren an Board. (Davon abgesehen würde man die Helligkeit bei einem UC mittels Led, Kondensator und Zeitmessung bestimmen...) Roland H. schrieb: > Schnell noch einmal Zur Hysteresefunktion der Schaltung. Du kannst es noch öfter wiederholen, aber das ist keine Hysterese. Das ist ein Fensterkomparator und zwar ohne Hysterese. So sieht ein (einzelner) Komparator mit Hysterese aus: https://www.elektronik-kompendium.de/sites/slt/0311271.htm Roland H. schrieb: > Ich jedenfalls finde es viel einfacher eine analoge Lösung > für eine einfache Steuerung zu erarbeiten als mich Tagelang mit der > Programmierung von µPs zu beschäftigen bis sie endlich das machen was > sie sollen Das ist das einzige Argument von Dir, was ich akzeptiere...
Andreas M. schrieb: > Das ist keine Hysterese sondern ein Totbereich. Nenn es wie du willst, die Funktion das sich in einem gewissen Bereich ein >0< Punkt befindet wo der Motor abgeschaltet wird und keinen Strom zieht ist wichtig und gegeben. Und es ist möglich ihn einfach durch verschiedene Widerstandswerte bzw auch ein Poti zu beeinflussen. Eine Hysterese ist eigentlich die Differenz eines Umschaltpunktes, das ist hier aber nur bei Wolkenbildung gegeben da sonst eine gleichmäßige Vorwärtsbewegung erfolgt. Hier wird das Signal gesplittet in ein oberes Schaltsignal und ein unteres. Nähert sich die verstärkte Differenzspannung dem oberen wird nach rechts gedreht bis es sich wieder mittig einpegelt, nähert es sich dem unteren wird nach links gedreht... Ob er nachhängt oder nicht interessiert doch den Kuckuck, da wird der Sensor einfach 0.01° nach rechts gebogen... Viel wichtiger ist doch wie viel Dekaden Lichtänderung überstrichen werden um sowohl in der Dämmerung als auch bei Sonnenschein eine akkurate Ausrichtung erfolgt. Und wo der Endstand abends ist interessiert auch nicht, da Nachts ohnehin kein Strom generiert wird.
:
Bearbeitet durch User
Roland H. schrieb: > Viel wichtiger ist doch wie viel Dekaden Lichtänderung überstrichen > werden um sowohl in der Dämmerung als auch bei Sonnenschein eine > akkurate Ausrichtung erfolgt. Und wo der Endstand abends ist > interessiert auch nicht, da Nachts ohnehin kein Strom generiert wird. Was für ein Unsinn. Zur sommerlichen Sonnenwende geht die Sonne ganz im Norden von DE in gut 37° N auf und in gut 322° N unter. Alleine dafür müsstest Du schon einen Drehkreis von gut 270° vorhalten, möchtest Du auch noch die Dämmerung mitnehmen, werden es 295°! Nun rate mal, in welche Richtung Deine Anlage morgens drehen möchte, wenn sie abends aufgrund Dunkelkeit bei ~330° gestoppt hat. Hättest Du keine Endschalter eingesetzt, würde Deine Anlage einfach die Kabel aufnudeln, bis sie reissen oder der zuständige Motor durchbrennt. Bereits in den frühen 80ern habe ich Satanlagen mit Zweiachsensteuerung importiert, verkauft und installiert, damals nicht für TV, sondern überwiegend Funkamateure, die damit alle möglichen Satelliten, bemannte Raumfahrt und Raumstationen verfolgten. Viele der Amateure bauten sich ihre Steuerungen auch selber. Und natürlich mit µc! Mitte der 90er wurden die ersten kommerziellen Solaranlagen mit ähnlichen Systemen ausgerüstet, idR. mit fast waagerechter Ausrichtung bei durchgehender Bewölkung, Steilstellen bei Schneefall und aus dem Wind nehmen bei Starkwind und mehr. Und natürlich nächtliches Zurückfahren auf die nächste morgentliche Startposition. Wir hatten damals u.a. in klein Expeditionen auf den Kilimanjaro ausgerüstet, die dort oben Laservermessungen der Gletscher betrieben. (Weitere Energiequelle war dann M-/Ethanolbrennstoffzelle, fossile Brennstoffe strikt untersagt..) Wenn jemand es gelernt hat, sich seine Platinen selber zu ätzen, ist es bedeutend wahrscheinlícher, dass er den Krempel heute schon längst entsorgt hat oder wie ich die letzten 20 Jahre nicht mehr angerührt hat, dafür aber den Einstieg in die µc-Welt vollzogen hinter sich hat. Und sei es nur Arduino und ESP Fertigmodule. Und die Welt ist voll von Programmen anderer Nutzer, die man übernehmen kann.
Andreas M. schrieb: > ..., aber das ist keine Hysterese. Das > ist ein Fensterkomparator und zwar ohne Hysterese. So sieht ein > (einzelner) Komparator mit Hysterese aus: Nur alleine die Elektronik zu betrachten, reicht da nicht aus. Ein Hystereseverhalten ergibt sich erst zusammen mit der Mechanik. Ein Motor dreht nach dem Abschalten immer etwas nach, so dass er sicher in den mittleren Bereich der Komparatorschaltung ("aus") fährt. Es verschiebt sich zwar nicht die Komparatorschwelle, aber der Sensorwert macht durch die Bewegung einen Sprung, der zusammen mit der Drehbewegung der Erde zu einem stabilen Verhalten an der Flanke (ohne beständiges Schalten durch Rauschen) führt. Und genau das kennzeichnet eine Hysterese. Sie wird durch den Nachlaufwinkel des Motors und die Drehgeschwindigkeit der Erde bestimmt, d.h. es handelt sich nicht um eine Hysterese der Steuerelektronik, sondern um eine Hysterese des gesamten Nachführsystems.
:
Bearbeitet durch User
Rainer W. schrieb: > Nur alleine die Elektronik zu betrachten, reicht da nicht aus. Ein > Hystereseverhalten ergibt sich erst zusammen mit der Mechanik. Wenn du eine echte Hysterese möchtest kannst Du gern im unteren Verstärker einen Rückkoppelwiderstand einfügen. Dazu ist jedoch noch die Auftrennung des Leiterzuges zwischen den OPVs und die Einfügung eines Entkoppelwiderstandes erforderlich um ihn wirksam zu machen. Beide sind leicht auf der Leiterseite nachrüstbar - auch alle 4 bei beiden Motoren. In diesem Fall ist jedoch nur eine Motorrichtung mit der Hysterese nutzbar und die Ein- und Ausgänge sind damit Richtungsabhängig. Für den Ost-Westverlauf wäre es sinnvoll, für den Süd-Nordverlauf eher weniger, da hier beide Richtungen benötigt werden. Dabei kannst du auch die Verstärkung des Eingangs OPVs vergrößern um den Umschaltpunkt schmaler zu machen. Bei 1MOhm führen dann sicher auch Schleierwolken zur Nachführbewegung
:
Bearbeitet durch User
Das Grundproblem des TO ist doch, dass er die Verwendung eines MC immernoch als "immensen" Aufwand wie für einen klassischen Computer ansieht. Da ist er wohl etwas in der Zeit verhaftet ... Ein MC kostet ggf. weniger als ein OPV und kann (im Gegensatz zum OPV) nahezu völlig frei in seinem Verhalten definiert (programiert) werden - das scheint er (noch) nicht so richtig verinnerlicht zu haben. Die Zeiten ändern sich eben ...
Frank E. schrieb: > Das Grundproblem des TO ist doch, dass er die Verwendung eines MC > immernoch als "immensen" Aufwand wie für einen klassischen Computer > ansieht. Da ist er wohl etwas in der Zeit verhaftet ... > > Ein MC kostet ggf. weniger als ein OPV und kann (im Gegensatz zum OPV) > nahezu völlig frei in seinem Verhalten definiert (programiert) werden - > das scheint er (noch) nicht so richtig verinnerlicht zu haben. Richtig, da wäre seine nächtliche Rückführung lediglich ein Codeschnippselchen, in seinem Schema muss er noch einiges zu seiner Schaltung dazubasteln, damit sein Teil auch am zweiten Tag noch (halbwegs richtig) arbeitet.
Roland H. schrieb: > Wenn du eine echte Hysterese möchtest kannst Du gern im unteren > Verstärker einen Rückkoppelwiderstand einfügen. Möchte ich nicht. Entscheidend ist doch, dass das Gesamtsystem sich vernünftig benimmt und an der Schaltgrenze nicht immer am Hin- und Herfahren ist. Du kannst dein Elektroniklehrbuch wieder einpacken ;-) Ralf X. schrieb: > ... in seinem Schema muss er noch einiges zu seiner > Schaltung dazubasteln, damit sein Teil auch am zweiten Tag noch > (halbwegs richtig) arbeitet. Und auch für vernünftiges Verhalten bei Wolken und Mondlicht muss man noch deutlich zusätzlichen Aufwand treiben. Leider fällt die notwendige Nachführgenauigkeit sowie Sinn und Zweck der Nachführung immer noch unter irgendeine versteckte Geheimhaltungsklausel :-(
Frank E. schrieb: > Ein MC kostet ggf. weniger als ein OPV und kann (im Gegensatz zum OPV) > nahezu völlig frei in seinem Verhalten definiert (programiert) werden - > das scheint er (noch) nicht so richtig verinnerlicht zu haben. Falsch, so ein MC will auch erst einmal programmiert werden! Dafür braucht man einen Rechner mit Programmierprogramm und einen Schnittstellenadapter, um den MC überhaupt programmieren zu können und man muss sich mit der Programmiersprache halbwegs auskennen, wenn man nicht irgendwelche Code-Schnipsel wild und ahnungslos zusammenkleben möchte!
Marcel V. schrieb: > Frank E. schrieb: >> Ein MC kostet ggf. weniger als ein OPV und kann (im Gegensatz zum OPV) >> nahezu völlig frei in seinem Verhalten definiert (programiert) werden - >> das scheint er (noch) nicht so richtig verinnerlicht zu haben. > > Falsch, so ein MC will auch erst einmal programmiert werden! Dafür > braucht man einen Rechner mit Programmierprogramm und einen > Schnittstellenadapter, um den MC überhaupt programmieren zu können und > man muss sich mit der Programmiersprache halbwegs auskennen, wenn man > nicht irgendwelche Code-Schnipsel wild und ahnungslos zusammenkleben > möchte! Ähmmm ... ja und nein. Die Evolution geht natürlich nicht nur mit der Hardware (z.B. OPV -> MC), sondern es müssen auch die zugehörige Kenntnisse "mitwandern". Früher war es gut und wichtig, sich mit dem Verhalten von OPVs auszukennen, heute eben mit MC's. Der Trend geht nun mal in Richtung Hardware zu Software (siehe FPGA, MC). Typisches Beispiel "SDR": Das Signal wird zum frühest möglichen Zeitpunkt nach der Antenne (ok, die und die Vorstufe bleiben erstmal analog) digitalisiert ... und der Rest ist Software. Und "Programmieradpter" braucht man für die meisten Einsteiger-MC (z.B. Arduino, ESP32xx) keinen, nur ein USB-Kabel. Die Software gibts auch kostenlos ...
:
Bearbeitet durch User
Frank E. schrieb: > Und "Programmieradpter" braucht man für die meisten Einsteiger-MC (z.B. > Arduino, ESP32xx) keinen, nur ein USB-Kabel. Die Software gibts auch > kostenlos ... Nochmal langsam zum mitschreiben. Ein OPV ist für alte Leute ein 2-Mann Zelt. Ein Mikrorechner ist für sie eine 5km große Tropfsteinhöhle. Ohne Führer sind sie darin verloren. Jetzt alles klar? Ich kann meine Schaltung ganz leicht reparieren. Kannst Du ohne Kenntnis des Programmes deine Steuerung reparieren ?
Roland H. schrieb: > Kannst Du ohne Kenntnis des Programmes deine Steuerung reparieren ? Kein Problem, habe eigene Software.
H. H. schrieb: > Kein Problem, habe eigene Software. Dachte ich auch mal, bis die Festplatte ihren Geist aufgab, danach war alles im Datenhimmel, viele Datenblätter waren im Netz verschwunden und auch einiges privates war dahin, weil man schließlich nicht täglich sichert... Da merkte ich auch das die Sicherungs-CDs witzlos waren, weil nach wenigen Jahren bereits viele Daten gar nicht oder nur noch schwer lesbar sind. Wieder war ich den Versprechen der Hersteller folgend, reingefallen...
:
Bearbeitet durch User
Roland H. schrieb: > H. H. schrieb: >> Kein Problem, habe eigene Software. > > Dachte ich auch mal, bis die Festplatte ihren Geist aufgab, danach war > alles im Datenhimmel, viele Datenblätter waren im Netz verschwunden und > auch einiges privates war dahin, weil man schließlich nicht täglich > sichert... Du postest jetzt mit einem Analogrechner? Aufgebaut mit LM324/LM358?
Roland H. schrieb: > Frank E. schrieb: >> Und "Programmieradpter" braucht man für die meisten Einsteiger-MC (z.B. >> Arduino, ESP32xx) keinen, nur ein USB-Kabel. Die Software gibts auch >> kostenlos ... > > Nochmal langsam zum mitschreiben. Ein OPV ist für alte Leute ein 2-Mann > Zelt. > Ein Mikrorechner ist für sie eine 5km große Tropfsteinhöhle. Ohne Führer > sind sie darin verloren. Jetzt alles klar? > Ich kann meine Schaltung ganz leicht reparieren. > Kannst Du ohne Kenntnis des Programmes deine Steuerung reparieren ? Es sei dir ja unbenommen, persönlich dieser Meinung zu sein. Mich stört aber, dass du das als absolute Wahrheit verkaufen willst. Ich bin auch keine 30 mehr und trotzdem ist mir (heute) ein MC sehr viel vertrauter als ein OPV. Abgesehen von Spezialanwendungen, wie z.B. hoch sensible Vorverstärker, braucht die Dinger heute keiner mehr. Ist m.E. ist das ähnlich wie bei Elektronen-Röhren: Abgesehen von einigen wenigen Spezialanwendungen (z.B. SEV oder Sender-Endstufen im oberen KW-Bereich) haben die sich auch erledigt.
H. H. schrieb: > Du postest jetzt mit einem Analogrechner? Aufgebaut mit LM324/LM358? Das ist ja auch was anderes! So etwas will man auch nicht selbst bauen, dafür braucht man zu viel kostbare Zeit und es gibt dafür auch schon fertige Schreibgeräte. Wenn man ein iPhone aus einzelnen Transistoren nachbauen müsste, dann wäre die Platine 2 Quadratkilometer groß. Eine einzelne Person müsste von der Kindheit an gerechnet, jeden Tag eine Eurokarte mit Transistoren bestücken und selbst dann reicht ein ganzes Leben einer einzelnen Person für ein selbstgebautes iPhone nicht aus (da muss die Frau schon mit anpacken)! 😅
Marcel V. schrieb: > Wenn man ein iPhone aus einzelnen Transistoren nachbauen müsste, dann > wäre die Platine 2 Quadratkilometer groß. ... und entsprechend langsam. Da wäre ein Signal vom einen zum anderen Ende länger als 5 µs unterwegs.
Roland H. schrieb: > Sicherungs-CDs witzlos waren, weil nach wenigen Jahren bereits viele > Daten gar nicht oder nur noch schwer lesbar sind. Wieder war ich den > Versprechen der Hersteller folgend, reingefallen... Welcher Hersteller soll das versprochen haben? Das CD-Rs nicht ewig halten war von Anfang an bekannt. Datensicherungen gehören auf Magnetfeld basierte Datenträger. Wurde und wird schon immer so gemacht. ( Auch SSDs, USB Sticks, sind vergesslich...)
Andreas M. schrieb: > Datensicherungen gehören auf Magnetfeld basierte Datenträger Zeig mir den, der privat ein Magnetbandlaufwerk zur Datensicherung nutzt - Hatte einen Commodore C+4 mit einem Kasettenlaufwerk wo Programme abgespeichert wurden - ein Aufatmen, als die Flopydisk dieses ersetzte und die Speicherzeit um Faktor 10 minimierte.
Roland H. schrieb: > Andreas M. schrieb: >> Datensicherungen gehören auf Magnetfeld basierte Datenträger > > Zeig mir den, der privat ein Magnetbandlaufwerk zur Datensicherung nutzt Andreas hat nichts von "Band" geschrieben.
Roland H. schrieb: > Zeig mir den, der privat ein Magnetbandlaufwerk Tatsächlich hatte ich ganz früher mal sowas privat, aber nie wirklich benutzt, war einfach zu teuer. Magnetbänder und passende Laufwerke waren in der Tat nicht günstig. (Vor allem in Einzelstückzahlen) Musste man halt abwägen was einem wichtiger ist. Ist schon eine Weile her, ich meine aber es gab auch Systeme die auf normale VHS Bänder gesichert haben. Wie Hinz aber sagte: H. H. schrieb: > Andreas hat nichts von "Band" geschrieben Genau. Für den Privatmann ist es am ökonomischsten einfach "normale" Festplatten (Die mit den Magnetscheiben) zu nutzen. Entweder per Schacht oder externes USB Gehäuse. Einmal in der Woche dranstecken, rüberkopieren und wieder zurück ins Regal.
...Und der Aufwand, um ein Solarpaneel nach der Sonne auszurichten, und die Elektronik muß den ganzen Tag unter Strom sein... Das geht auch einfacher und stromsparender, auch analog: Das Energiemaximum eines Paneels nimmt mit dem Cosinus des Sonnenstandes anfangs nur wenig ab, dann wird schon nachgestellt. Die Drehachse ist auf den Polarstern gerichtet. Die Sonne dreht sich 15° in der Stunde, man stellt feste Fixpunkte um 8, 10, 12, 14, 16 Uhr ein und eine Schaltuhr, die einen Motor um diese Zeiten ab 10 Uhr genau 1 Umdrehung bewegt. Damit wird das Schaltrad eines Malteser-Getriebes gedreht. Das Getriebe ist selbsthemmend und aus starkem Alublech gefertigt. Um 18 Uhr dreht der Motor entgegensesetzt, bis die Grundstellung um 8 Uhr für den nächsten Tag wieder erreicht ist. All das kann mechanisch mit Mikroschaltern und wenigen Relais erreicht werden. Die Sonnenhöhe wird nur für Frühling/Herbst und Sommer einmal über die Neigung zur Achse festgestellt. Statt des klassischen Malteser-Getriebes kann man bei kleinen Paneels auch die Version mit 2 Schaltfingern und Schlitzscheibe verwenden, mit etwas anderer Elektronik (mehr Umdrehungen).
:
Bearbeitet durch User
Werner H. schrieb: > die Elektronik muß den ganzen Tag unter Strom sein... Ach wo, ein µC kann da fast die ganze Zeit im Tiefschlaf liegen.
Es gibt ja auch diese drehenden Häuser, da spart man sich den ganzen Aufwand und kann die Panel auf dem Dach einfach festschrauben ;-) Haus folgt der ☀️ bzw wird von frouw per Hand nachgedreht... (wegen der blühenden Zimmerpflanzen)
Habe vor langer Zeit mal gelesen, dass nachgeführte Solarpanele im Durchschnitt um die 30% mehr Energie liefen sollen als fest stehende. Ich nehme an, das gilt nur für klaren Himmel. Je diffuser die Beleuchtung ist (Wolken, Dunst), um so geringer werden die Unterschiede sein. Muss man halt entscheiden, ob sich der - insbesondere mechanische - Aufwand lohnt.
Er lohnt überhaupt nicht (mehr). Bewegliche Mechanik ist teuer und fehleranfällig.
Roland H. schrieb: > Nochmal langsam zum mitschreiben. Ein OPV ist für alte Leute ein 2-Mann > Zelt. Nunja, kratze gerade an den 70. Aber für mich ist ein OPV ein Mauseloch, in das ich mich zwar manchmal hineinquetschen muss, ansonsten tut ein µP viel mehr und macht es viel besser. Ja, mittlerweile kann ich einigermaßen C, obwohl auch ich mit FORTRAN und Lochkarten das programmieren lernte.
Frank E. schrieb: > Habe vor langer Zeit mal gelesen, dass nachgeführte Solarpanele im > Durchschnitt um die 30% mehr Energie liefen sollen als fest stehende. Ob das mit realen Einstrahlungsdaten tatsächlich so ist, kannst du selber nachrechnen (lassen). https://re.jrc.ec.europa.eu/pvg_tools/de/
Angehängte Dateien:
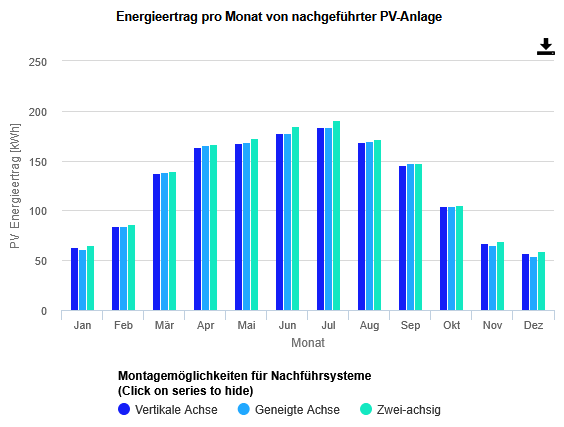
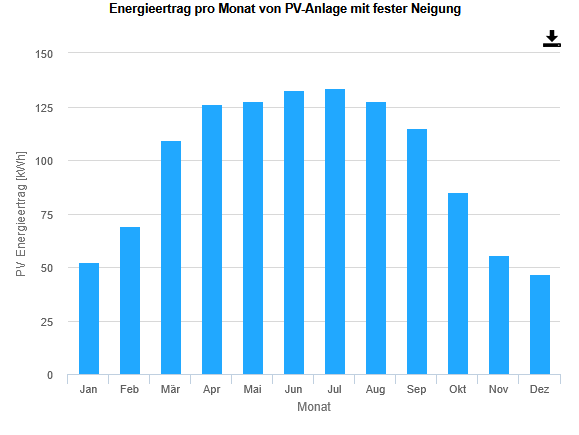
Rainer W. schrieb: > Frank E. schrieb: >> Habe vor langer Zeit mal gelesen, dass nachgeführte Solarpanele im >> Durchschnitt um die 30% mehr Energie liefen sollen als fest stehende. > > Ob das mit realen Einstrahlungsdaten tatsächlich so ist, kannst du > selber nachrechnen (lassen). > https://re.jrc.ec.europa.eu/pvg_tools/de/ Laut dem Tool bringt eine einachsige Nachführung (egal welcher!) und optimal ausgerichteter zweiten Achse bei unverschatteter Einzellage gegenüber einer optimal ausgerichteten Festanlage übers Jahr ein Plus von rund 30%. Wird die zweite Achse ebenfalls nachgeführt, bringt das lediglich lachhafte 3% zusätzlich, kann man also sofort in der Pfeife rauchen. Baut man damit allerdings einen Solarpark, braucht man dafür aber sehr viel Gelände pro Modul oder aber lässt es zu, dass sich die Modulflächen gegenseitig verschatten und niemals die 30% Mehrertrag erreichen. Sehr gut auf dem Bild von Lothar in Beitrag "Re: einfacher analoger Sonnenfolger für 3-14V, max.5A" zu sehen. Nett auch hier beschrieben: https://www.photovoltaikforum.com/thread/18864-20-drehhallen-bautzen-mit-581kw-gefunden/?pageNo=1 ff 2008 lohnte es sich dennoch aufgrund der hohen Vergütung auf 20 Jahre und der Deklaration als Aufdachanlage im (ehemaligen) billigem Freiland! https://www.photovoltaikforum.com/userpix/1557_Singwitz1_1.jpg
{kind=link}
Werner H. schrieb: > ...Und der Aufwand, um ein Solarpaneel nach der Sonne auszurichten, und > die Elektronik muß den ganzen Tag unter Strom sein... > Das geht auch einfacher und stromsparender, auch analog: > Schaltuhr ... Motor Pendeluhr und Pneumatik; der Druckluftspeicher wird per Solarkollektor geladen ;)
Druckluftspeicher: Preßluft ist für lange Zeit speicherbare Energie (wenn man sie sowieso in der Werkstatt benötigt). Ein altes Aggregat mit getrenntem Motor und Kompressor ist leicht auf einen 24-V-Motor umbaubar. So kann man überschüssigen Solarstrom dauerhaft speichern.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.