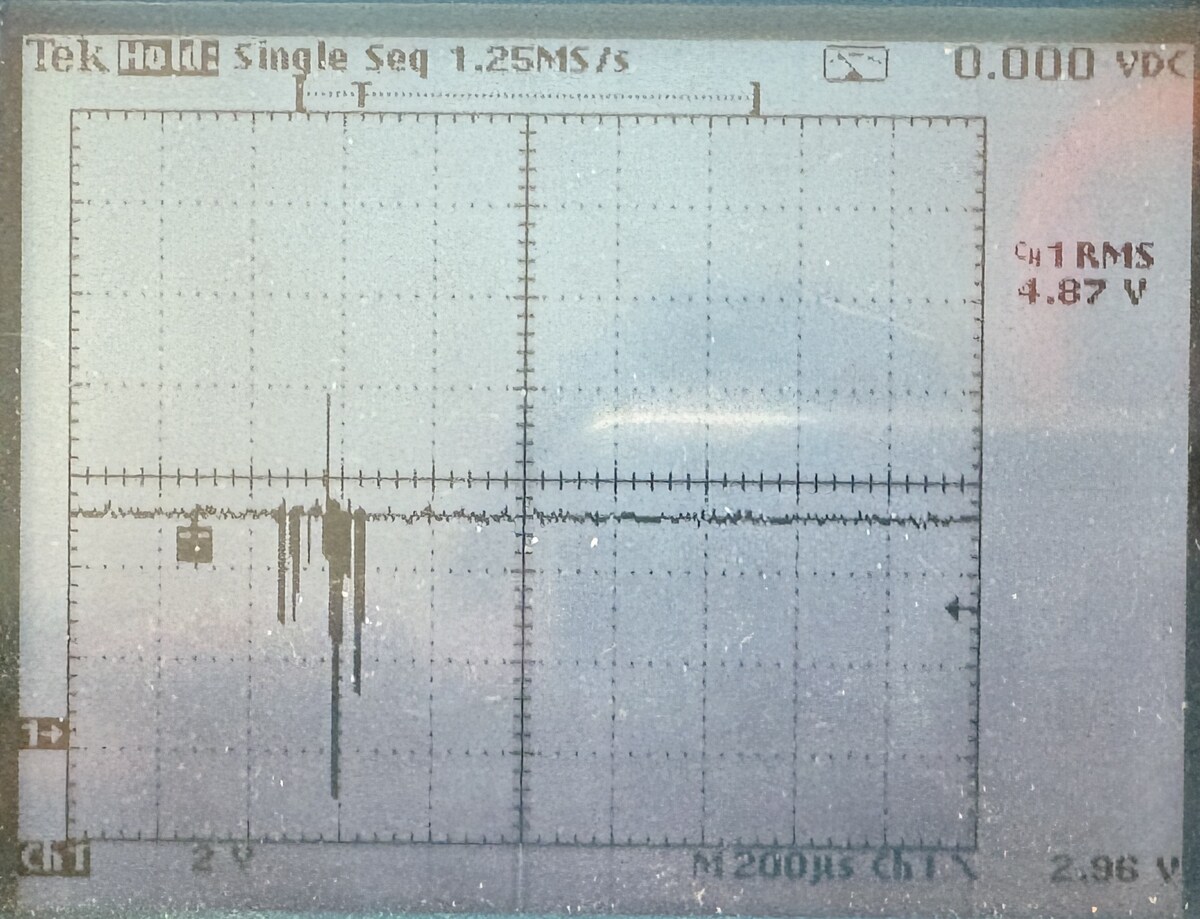
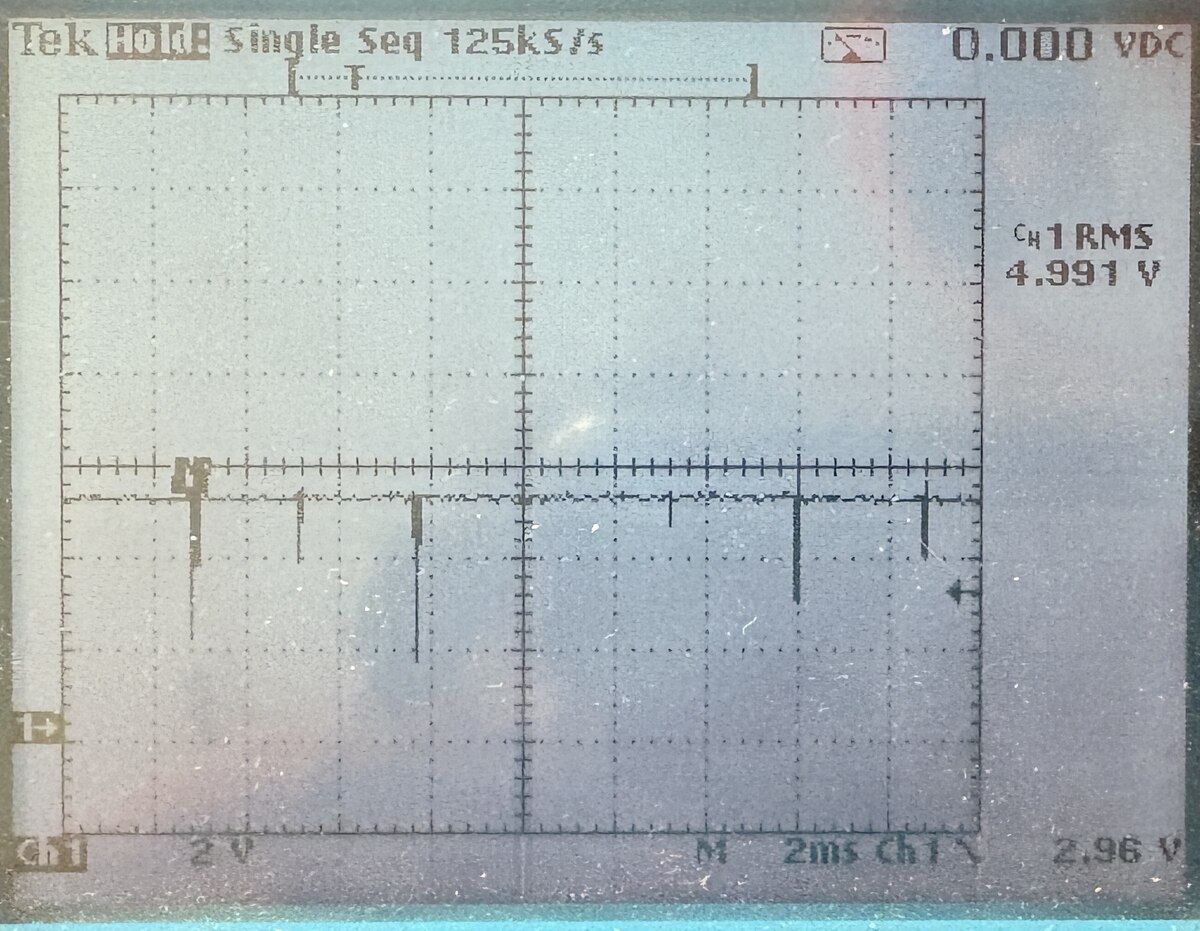
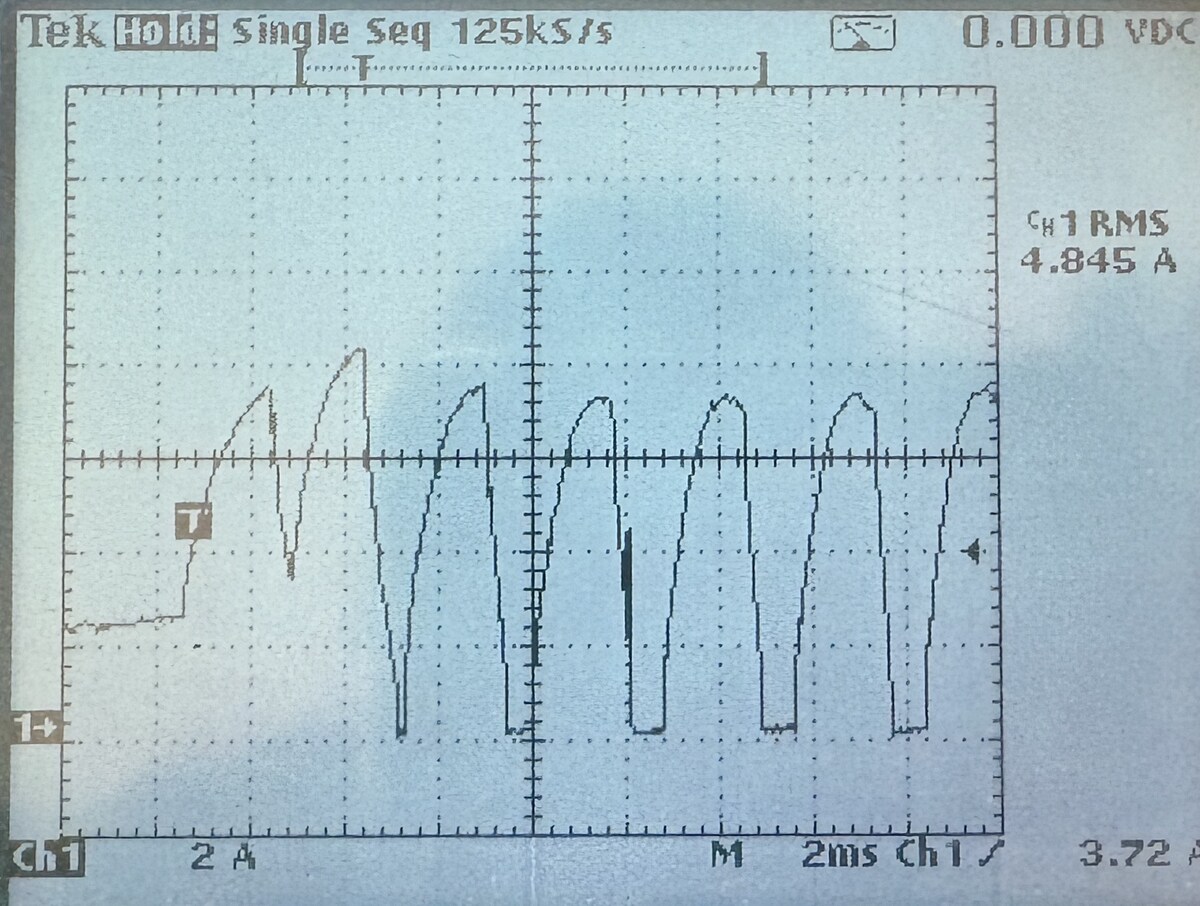
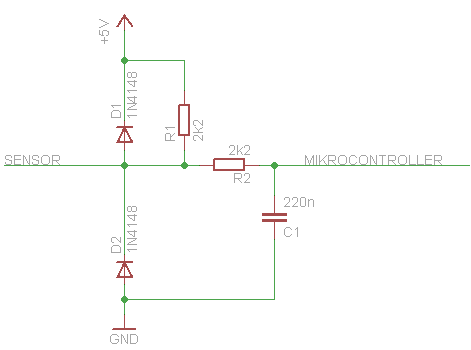
Hallo in die Runde, ich habe einen digitalen Tacho für den SR 50 gebaut. Das Teil läuft soweit selbst einwandfrei. Einzig, wenn die Hupe betätigt wird sind plötzlich 400 m mehr aufm Zähler und km/h werden angezeigt. Ich habe mal die Stromaufnahme der Hupe und am Eingang des Hallsensors gemessen. Die Einkopplung zieht den Pull down im Takt der DC Hupe runter. Der Hallsensor wird mit 12 V DC versorgt und der Kreis wurde schon etwas für Störungen "optimiert" Hat jemand eine Idee, wie ich den Eingang (größerer Pull down ?, größeres C ?) besser beschalten / schützen kann? Danke
Angehängte Dateien:
-

IMG_3125.jpg
230 KB -

IMG_3126.jpg
230 KB -

IMG_3127.jpg
240 KB
Egon schrieb: > Ich habe mal die Stromaufnahme der Hupe und am Eingang des Hallsensors > gemessen. Was sieht man da auf welchem Bild? Wie sieht das Tachosignal normalerweise aus? Wieviele Pulse kommen pro Radumdrehung? > wie ich den Eingang (größerer Pull down ?, In der gezeigten Schaltung ist kein Pulldown. > größeres C ? Als Tipp: rechne mal die Zeitkonstante dieses RC-Gliedes mit den 10pF aus. Du wirst sehen: die Radumdrehungen kommen um viele Zehnerpotenzen langsamer als im Zeitbereich um 5ns, wo das RC-Glied wirkt.
:
Bearbeitet durch Moderator
Beitrag #8002892 wurde vom Autor gelöscht.
Was sieht man da auf welchem Bild? Wie sieht das Tachosignal Auf den ersten zwei Bildern die 5 V, welche normalerweise vom Hall auf GND gezogen werden. Hier zieht / koppelt die Hupe ein und „zieht auf GND“ normalerweise aus? Wieviele Pulse kommen pro Radumdrehung? 1 Impuls high -> low-> high pro Umdrehung, Radumfang 1,5 m wie ich den Eingang (größerer Pull down ?, In der gezeigten Schaltung ist kein Pulldown. Stimmt, die 5 V werden mit Open Kollektor vom Hall auf GND gezogen Danke
Egon schrieb: > Hat jemand eine Idee, 10pF sind zu wenig, 1-10nF, und 1N4004 sind zu langsam, BAV199 macht das besser. Ansonsten: eine Prinzipschaltung hinzuzeichnen ist einfach, eine störsichere und betriebssichere Schaltung aufzubauen ist halt erheblich schwieriger, es gibt ganze Kurse und Lehrgänge und Spezialisten für EMV. Die Schaltung braucht EINEN Massebezugspunkt, die Betriebsspannung wird gefiltert und an ihr abgestützt, jede wichtige Masseverbindung führt auf kurzem Wege zu diesem Punkt. Dein Hallsensor auch, mach L1 da weg, die stört ungemein. Wenn, dann kommt sie in die Leitung von R9.
:
Bearbeitet durch User
Mach in die Betriebsppannungsleitung eine Diode und einen großen Elko, dann kann die Hupe dem Hallgeber nicht mehr so leicht die Spannung runter ziehen.
Mich würde auch interessieren, was nach diesem "Eingangsfilter-RC-Glied" kommt: wohin geht das Signal RAD_RPM? Falls danach ein µC kommt und du selber die SW in der Hand hast, dann könntest du die Filterung auch ganz einfach in der SW machen. Denn du weißt ja dank einer Messung sicher, welche Pulsdauern bei diesem Signal relistisch und sinnvoll sind.
Beitrag #8002961 wurde von einem Moderator gelöscht.
Beitrag #8003027 wurde von einem Moderator gelöscht.
Egon schrieb: >> Wieviele Pulse kommen pro Radumdrehung? > 1 Impuls high -> low-> high pro Umdrehung, Radumfang 1,5 m Wie ist das Tastverhältnis des Signals? Wie lange ist es bei der Maximalgeschwindigkeit low und wie lange ist es high? Mal eine überschlägige Rechnung: wenn der Hallgeber 10° von den 360° einer Radumdrehuung belegt ist und der Göppel 80km/h (bergab mit Rückenwind) schafft, dann hast du 22m/s. Mit 1,5m Radumfang sind das ca. 15Hz und damit 66ms. Davon 10°/360° sind knapp 2ms. Somit ist dein RC-Glied mit der 5ns Zeitkonstante fast "tausendmal zu schnell". Und lässt damit auch "tausendfach zu viele unnötige Störungen" durch. Ein Tipp: je kleiner der Belegungswinkel des Hallsensors ist, umso "hochfrequenter" muss das Eingangsfilter ausgelegt werden. Im Sinne der Störsicherheit wäre es am besten, wenn der Hallgeber eine halbe Radumdrehung belegt wäre und eine halbe Radumdrehung frei. Rechne das einfach mal selber durch. > wie ich den Eingang (größerer Pull down ?, >> In der gezeigten Schaltung ist kein Pulldown. > Stimmt, die 5 V werden mit Open Kollektor vom Hall auf GND gezogen Und der 6k-Pullup dürfte dafür ruhig ein wenig niederohmiger sein. Meine Eingangsschaltung sähe etwa so aus (wenn es bedrahtete Bauteile sein müssen):
1 | .----------------------o---------o----- 5V |
2 | | | | |
3 | | - | |
4 | | ^ BAT41 2k2 |
5 | | | | |
6 | Sensor ----------100R----o---------o-----> µC |
7 | | | | |
8 | | - === 220n |
9 | | ^ BAT41 | |
10 | | | | |
11 | '----------------------o---------o------ GND |
Mit 220n und 2k2 Pullup ergibt sich eine Ladezeitkonstante von knapp einer halben ms. Das ist allemal schnell genug für das bei 80km/h entstehende 2ms-high-Signal. Und der Eingang am µC ist selbstverständlich **kein Interrupteingang**. Egon schrieb: > Auf den ersten zwei Bildern die 5 V, welche normalerweise vom Hall auf > GND gezogen werden. Hier zieht / koppelt die Hupe ein und „zieht auf GND“ Ja, da sind einfach "die üblichen Störungen zu sehen". Was ist auf dem dritten Bild? Die Versorgung sähe bei mir etwa so aus:
1 | 4007 |
2 | Bordnetz ---->|--10R--o-----o-------7805----o-- 5V |
3 | | | | | |
4 | - | 470µ | | 100µ |
5 | 4007 ^ === | === |
6 | | | | | |
7 | Masse -------------o-----o---------o-----o-- GND |
Stefan S. schrieb: > Mach in die Betriebsppannungsleitung eine Diode und einen großen Elko, > dann kann die Hupe dem Hallgeber nicht mehr so leicht die Spannung > runter ziehen. Oder vorher einfach erst mal an zwei Massepunkten "Masse gegen Masse" messen, um zu sehen, ob das nicht auch von einer ungünstigen Masseführung kommt.
:
Bearbeitet durch Moderator
Angehängte Dateien:
-

Eingangsfilter.png
1,7 KB
Lothar M. schrieb: > Meine Eingangsschaltung sähe etwa so aus (wenn es bedrahtete Bauteile > sein müssen): .----------------------o---------o----- 5V > | | | > | - | > | ^ BAT41 2k2 > | | | > Sensor ----------100R----o---------o-----> µC > | | | > | - === 220n > | ^ BAT41 | > | | | > '----------------------o---------o------ GND Nö. Das hatten wie schon mehrfach. Die Klemmdioden gehören direkt an den Eingang, das ist das kleine 1x1 des ESD-Schutzes. Danach kommt der Pull-Up Widerstand und DANN erst der RC-Filter. Den kann und sollte man dann auch etwas hochohmiger auslegen. Vor allem wirkt er dann für LOW UND HIGH mit etwa der gleichen Zeitkonstante und belastet den Ausgang des Sensors weniger. Eher so.
Falk B. schrieb: > Die Klemmdioden gehören direkt an den Eingang, das ist das kleine 1x1 > des ESD-Schutzes. Nur haben wir es hier grundlegend nicht mit ESD zu tun. Aber seis drum: so kann man es auch machen. Solange die Filterzeitkonstante/-frequenz halbwegs zur Anwendung passt, ist die Maus so gut wie in der Falle.
:
Bearbeitet durch Moderator
Hallo zusammen und danke für das Feedback. Ich war leider eine Weile offline, ich hoffe das hindert nicht am anknüpfen... Da die Zündung sehr EMV intensiv ist gibt es am Eingang eine 1mH stromkompensierte SMD Line Filter, WE-SL2 Serie gefolgt von 100 µF. Nach der Stromkompensierten erfolgt die Massebildung, während die 100µF am +Eingang des Spannungsreglers sitzt. Um Leitungsgebundene Störungen von Extern kommend abzumildern gibts beim Hallsensor nochmal die 100µ an GND sowie die 100 / 500 R. Der Magnet (1 cm breit) fliegt am Hallsensor (Radius von Radmitte 12-15 cm) quasi fix vorbei. 8 Grad Winkel könnten das sein (1/45 von 360 Grad). Der Hall kann ja 100 mA, demzufolge könnte der Pulldown theoretisch bis auf 50 Ohm runter, wobei ich eher bei min. 500 Ohm (10 mA) bleiben würde. Das die Störungen in die Versorgung einkoppeln sehe ich eher nicht, da würde der Controller in Display spinnen.. Das Kabel zum Hall ist geschirmt und soweit ich mich erinnere am Sensor unten am Rad der Schirm auf GND gelegt. Vielleicht wäre es noch besser den Schirm oben an der LP auf GND zu legen ? Softwarebearbeitung der Störung schließe ich aus, dass muss so hinzubekommen sein. Danke
Egon schrieb: > Hallo zusammen und danke für das Feedback. Ich war leider eine Weile > offline, ich hoffe das hindert nicht am anknüpfen... > > Da die Zündung sehr EMV intensiv ist Blödsinnige Wortkombination. EMV heißt Elektromagnetische Verträglichkeit. Also brauchst du eine Schaltung, die eine hohe EMV hat, sprich sie ist sehr unempfindlich bezüglich von Störungen von außen. Wobei EMV beide Richtungen betrifft. möglichst geringe Empfindlichkeit für Störungen von außen möglichst geringe Aussendung von Störungen nach außen -> hohe EMV! > gibt es am Eingang eine 1mH > stromkompensierte SMD Line Filter, WE-SL2 Serie gefolgt von 100 µF. Die zeigt dein Schaltplan aber nicht, dort sind nur 2x 100nF. Die sind aber sinnvoller, denn 100uF sind bei HF nicht mehr sonderlich wirksam. > Um Leitungsgebundene Störungen von Extern kommend abzumildern gibts beim > Hallsensor nochmal die 100µ an GND sowie die 100 / 500 R. Kompletter Unfug! Damit baust du dir eine hochohmige HF-Masse! DIREKTE Masseanbindung. Und 100nF zwischen VCC und GND DIREKT am HAL-Sensor! > Der Hall kann ja 100 mA, demzufolge könnte der Pulldown theoretisch bis > auf 50 Ohm runter, Unsinn. > wobei ich eher bei min. 500 Ohm (10 mA) bleiben Reicht auch. Die hohe EMV wird durch den anschließenden RC-Filter erreicht. > würde. Das die Störungen in die Versorgung einkoppeln sehe ich eher > nicht, da würde der Controller in Display spinnen.. Das kann man so einfach gar nicht sagen. > Das Kabel zum Hall ist geschirmt und soweit ich mich erinnere am Sensor > unten am Rad der Schirm auf GND gelegt. Vielleicht wäre es noch besser > den Schirm oben an der LP auf GND zu legen ? BINGO! An beiden Seiten. Am Sensor und an der Platine. > Softwarebearbeitung der Störung schließe ich aus, dass muss so > hinzubekommen sein. Vermutlich, wenn man es richtig macht. D11 und D12 müssen schnelle Dioden sein, 1N4148 reichen. R32 ist auf der falschen Seite angeschlossen, der gehört vor R31. Das sagte und ZEIGTE ich schon. Beitrag "Re: Einkopplung/ Schaltung optimieren" C19 ist homöopatisch, viel zu klein. Hatte ich alles schon mal dimensioniert, siehe oben. Man kann auch auf 100 oder 47nF runter gehen, vielleicht sogar 10nF. Muss man testen. Wenn Leute nicht mal zuhören und nachzeichnen können . . . Oder war ChatGPT schlauer?
Beitrag #8024193 wurde vom Autor gelöscht.
Falk B. schrieb: > Also brauchst du eine Schaltung, die eine hohe EMV hat ... Genauso blödsinnige Wortkombination. An einer Verträglichkeit sind immer zwei beteiligt: Einer, der versucht, zu stören und einer, der versucht, sich nicht stören zu lassen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.