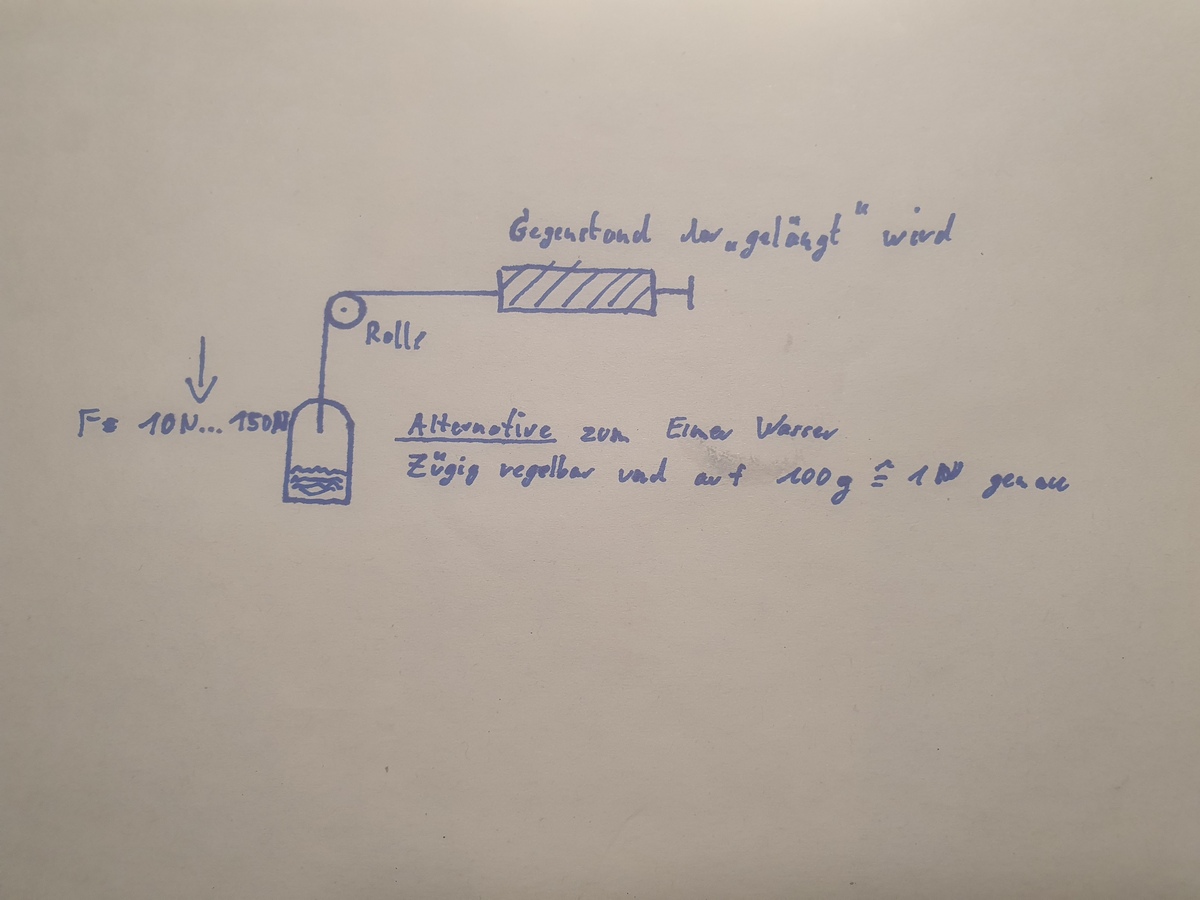
Hallo, um einen Gegenstand für etwa 1h mit einer in dieser Zeit wechselnden Zugkraft von erwa 10N bis 150N zu beaufschlagen, suche ich eine mechanische Vorrichtung. Im einfachsten Fall wären das bis zu 2 Eimer Wasser über Umlenkrolle. Ich würde hier gerne ein wasserloses System nutzen und es muss elektrusch, also über Schalter oder Poti in groben Stufen (1..2N) regelbar sein. Eine Verringerung der Zugspannung muss auch möglich sein. Mein Gefühl sagt mir, dass es schon eine mechanische Lösung für ein ähnliches Problem bereits gibt, die ich hier übernehmen könnte oder als Vorbild nehmen könnte. In Sportstudios gibt es ja elektronisch einstellbare Fitnessgeräte z.B.. Vielleicht habt ihr eine Idee. Grüße Marco / Hochfrequenz
Angehängte Dateien:
-

20260315_225856.jpg
200 KB
:
Bearbeitet durch User
Seilwinde mit (fremdgekühltem) Gleichstrommotor. Der Strom ist etwa proportional zum Drehmoment. Um wieviel dehnt sich das Teil? Marco S. schrieb: > 10N bis 150N ... in groben Stufen (1..2N) regelbar also etwa 100 Stufen. was wären bei dir dann feine Stufen?
Marco S. schrieb: > in dieser Zeit wechselnden Zugkraft von erwa 10N bis 150N zu > beaufschlagen, suche ich eine mechanische Vorrichtung. Im einfachsten > Fall wären das bis zu 2 Eimer Wasser über Umlenkrolle. Zwei Wassereimer alleine bewerkstelligen da auch nicht viel, da braucht es mehr. Insb. wenn da etwas gesteuert/geregelt werden soll. Mittels passenden Motor, der Stillstand unter Last verträgt und einer einstellbaren Stromquelle kannst Du alles trocken durchspielen.
Pneumatikzylinder (Balgzylinder) mit elektronischem Druckminderer?
Schrittmotoren können in kleinen Schritten vorwärts und rückwärts gesteuert werden. Eine Schnecke auf den Wellenzapfen treibt ein großes Schneckenrad mit einem kleinen Seilwindendurchmesser an.
Marcel V. schrieb: > Schrittmotoren können in kleinen Schritten vorwärts und rückwärts > gesteuert werden. Eine Schnecke auf den Wellenzapfen treibt ein großes > Schneckenrad mit einem kleinen Seilwindendurchmesser an. Schrittmotoren sollen vorgegebene Schritte ausführen. Der TE möchte gerne steuerbare Drehmomente, wenn ich ihn richtig verstanden habe.
Dehnung bei 15kg Wasser ungefähr 5mm..8mm. Die Ausgangslänge ist nicht exakt. Grobe Stufen reichen. Heisst Start mit 1N , dann auf 2N und so weiter erhöhen, Ende spätestens bei 150N. Die Einhaltung der Kraft ist wichtig. Ob das zu längende Teil dann 5 oder 6mmm lang wird ist zweitrangig. Im Prinzip könnte man gedanklich immer eine Tafel Schokolade drauf legen oder runternehmen. Grüße Marco
:
Bearbeitet durch User
Ein DC Getriebemotor (z.B. Pollin) dreht eine Gewindespindel mit Mutter. Die spannt ein Seil zum Gegenstand. Das Ganze ist mittels Feder elastisch am Fixpunkt befestigt. Wenn die Zugkraft nicht nur mittels Federwaage gemessen, sondern geregelt werden soll, entweder am Fixpunkt eine Wägezelle einsetzen, oder den Federweg (~Zugkraft) mittels Schiebepoti abnehmen und dem Motor automatisch nachregeln. (Prinzip wie in einem Modellbauservo)
Es fehlt die essentielle Angabe über den zurückzulegenden Weg deiner Anordnung. Im Grunde ist es einfach. Nimm einen Stepper, koppele diesen an eine Trapezspindel. Daran einen Kraftsensor und der Rest ist Regelungstechnik. Jede Materialzugprüfmaschine arbeite so.
Ove M. schrieb: > Im Grunde ist es einfach. Nimm einen Stepper, koppele diesen an eine > Trapezspindel. Daran einen Kraftsensor und der Rest ist > Regelungstechnik. > Jede Materialzugprüfmaschine arbeite so. Aha. Jede? Du bist überzeugt? Und deswegen muss das die einzig richtige Lösung sein?
Ralf X. schrieb: > Ove M. schrieb: >> Im Grunde ist es einfach. Nimm einen Stepper, koppele diesen an eine >> Trapezspindel. Daran einen Kraftsensor und der Rest ist >> Regelungstechnik. >> Jede Materialzugprüfmaschine arbeite so. > > Aha. > Jede? > Du bist überzeugt? > Und deswegen muss das die einzig richtige Lösung sein? Ich hab dich auch lieb! Schlaf schön!
Ove M. schrieb: > Jede Materialzugprüfmaschine arbeite so. Komisch. Wofür dienten dann bloß die Hydraulikzylinder, die Hydraulikpumpe, die Ventile, usw. bei der Maschine, mit der ich vor etlichen Jahren mal arbeitete? War das alles Tarnung für den Schrittmotor?
Marco S. schrieb: > Ich würde hier gerne ein wasserloses System nutzen Natürlich kann man stattdessen auch wasserfreie Flüssigkeiten, z.B. Öl, verwenden. Oder massive Gewichte aus Metall oder Beton.
Hallo zusammen, Ralf X. schrieb: > Marcel V. schrieb: >> Schrittmotoren können in kleinen Schritten vorwärts und rückwärts >> gesteuert werden. Eine Schnecke auf den Wellenzapfen treibt ein großes >> Schneckenrad mit einem kleinen Seilwindendurchmesser an. > > Schrittmotoren sollen vorgegebene Schritte ausführen. > Der TE möchte gerne steuerbare Drehmomente, wenn ich ihn richtig > verstanden habe. Beides richtig. Wenn man einen Schrittmotor mit Encoder und einen geeigneten Controller [1] nimmt, kann man das ganze auf Drehmoment regeln. In Verbindung mit einer passenden Seilscheibe ergibt sich daraus eine Zugkraft. Mit freundlichen Grüßen Thorsten Ostermann [1] http://mechapro.de/pdf/DDS1_Flyer_DE.pdf
Marco S. schrieb: > Vielleicht habt ihr eine Idee. Ja, nimm einen Balken und verschiebe ein Laufgewicht...
Thorsten O. schrieb: > Ralf X. schrieb: >> Marcel V. schrieb: >>> Schrittmotoren können in kleinen Schritten vorwärts und rückwärts >>> gesteuert werden. Eine Schnecke auf den Wellenzapfen treibt ein großes >>> Schneckenrad mit einem kleinen Seilwindendurchmesser an. >> >> Schrittmotoren sollen vorgegebene Schritte ausführen. >> Der TE möchte gerne steuerbare Drehmomente, wenn ich ihn richtig >> verstanden habe. > > Beides richtig. Wenn man einen Schrittmotor mit Encoder und einen > geeigneten Controller [1] nimmt, kann man das ganze auf Drehmoment > regeln. In Verbindung mit einer passenden Seilscheibe ergibt sich daraus > eine Zugkraft. Der TO will 150N Zugkraft. Bei einer Seilscheibe braucht man da schon ordentlich Drehmoment. Zusätzlich darf das Seil sich nicht mehrlagig aufwickeln, sonst stimmt eine fixe Umrechnung Zugkraft/Drehmoment nicht mehr. Die tatsächliche Zugkraft zu messen dürfte die Regelung einfacher machen und bietet mehr mechanische Konstruktionsfreiheit (Zugspindel, mehrlagige Seilscheibe, Getriebe).
Marco S. schrieb: > Vielleicht habt ihr eine Idee. Wenn du zwischen Antrieb und Gegenstand eine Zugfeder baust, reduziert sich das Problem auf eine Positionsänderung (mit zumindest 150N). Da du vermutlich die gewünschte 'Längung' als Sollwert vorgeben willst, brauchst du noch nicht mal die sich ergebende Zugkraft zu messen, nur die Istlänge.
Hier ist der Fragesteller: Es muss die Zugkraft in 1N -Schritten eingestellt werden. Die dabei entstehende Längung kann zur Regelung nicht herangezogen werden.Sie liegt typischerweise zwischen 4 und 8mm und wird z.a. vom Durchmesser, Form des Gegenstandes beeinflusst. Die Lösung sollte möglichst automatisiert sein. Zugkraft steigern, dann wieder etwas entlasten, dann wieder steigern. Sehr simpel wäre ein Wasserkanister mit Füllstandssensor. Durch zu und abpumpen würde das Gewicht geregelt. Ich vetmute aber dass ich da wg. Unschärfe des Sensors gröbere Schritte als 1N habe. Diese Funktion muss doch auch ohne Wasser/Flüssigkeit herstellbar sein. Eine Lösung ohne 100 Versuchsreihen oder Servomotor. Halt wie man so was 1960 als automatischen Ablauf gebaut jätte. a la MC Gyver :=) PS: Servomotor schaue ich mir an, halte das aber für sehr anspruchsvoll..
:
Bearbeitet durch User
Beitrag #8023264 wurde vom Autor gelöscht.
Marco S. schrieb: > Es muss die Zugkraft in 1N -Schritten eingestellt werden. Die dabei > entstehende Längung kann zur Regelung nicht herangezogen werden.Sie > liegt typischerweise zwischen 4 und 8mm und wird z.a. vom Durchmesser, > Form des Gegenstandes beeinflusst. Lese dir die Ideen doch mal in Ruhe durch. Du musst die Zugkraft irgendwie bestimmen. Und du musst ziehen. Das sind die zwei Teilaufgaben. Zugkraft bestimmen kannst du durch Schwerkraft (Eimer/Wasser/Umlenkung/Volumenbestimmung). oder durch Eine Kraftmessdose oder durch Messung der Längung einer Feder und Kenntnis der Federkonstante. oder durch Messung/Vorgabe des Stroms in einem Motor und Umrechnung des Drehmoments auf Zugkraft. Das ist halt alles nicht ganz trivial. Deine geforderte Auflösung von 1:150N macht das auch nicht einfacher. Denn das fordert schon eine ordentliche Genauigkeit. Welchen Fehler lässt du denn beim Wert von 1N zu? Wenn das eine Newton z.B. einen max. Fehler von 10% haben soll. dann muss die Bestimmung zumindest in dem Bereich einen max. Fehler von 1/1500 haben, also mx. 0,66 Promille vom Maximalwert.
Der Ansatz mit dem motorischen Verschieben eines Laufgewichts könnte ein Ansatz sein. Z.B. 1kg mit einem Servomotor auf einem Kraftarm verfahren. Lastarm kürzer. Das würde ich mir aktuell zum bauen eher zutrauen. Bauraum sollte aber auf 1m3 für diese Mimik beschränkt sein. Marco
wegen Nachfrage: Fehlertoleranz +/- 1N. Steuerung um Servomotor auf Strecke zu verfahren schaffe ich. Motor ansteuern um über Stromfluss definierte Kraft zu erzeugen bekomme ich nicht hin. Kraftmessdosen stelle ich mir auch nicht einfach vor und das wäre dann noch in minimale Bewegungen umzusetzen. Daher gefällt mir das motorische verfahren eines Laufgewichts. Marco
:
Bearbeitet durch User
Hallo Udo, Udo S. schrieb: > Thorsten O. schrieb: >> Ralf X. schrieb: >> Beides richtig. Wenn man einen Schrittmotor mit Encoder und einen >> geeigneten Controller [1] nimmt, kann man das ganze auf Drehmoment >> regeln. In Verbindung mit einer passenden Seilscheibe ergibt sich daraus >> eine Zugkraft. > > Der TO will 150N Zugkraft. Bei einer Seilscheibe braucht man da schon > ordentlich Drehmoment. Zusätzlich darf das Seil sich nicht mehrlagig > aufwickeln, sonst stimmt eine fixe Umrechnung Zugkraft/Drehmoment nicht > mehr. Ja, und? Bei einer Seilscheibe mit r=50mm sind das 7,5Nm. Macht man die Scheibe kleiner, reduziert sich auch das Drehmoment entsprechend. Niemand hat gesagt, dass das mit einem Nema17 Motor aus der Grabbelkiste zu machen ist. Mit einem Nema34 Motor geht das durchaus. Mit freundlichen Grüßen Thorsten Ostermann
Angehängte Dateien:
-

20260316_120702.jpg
190 KB
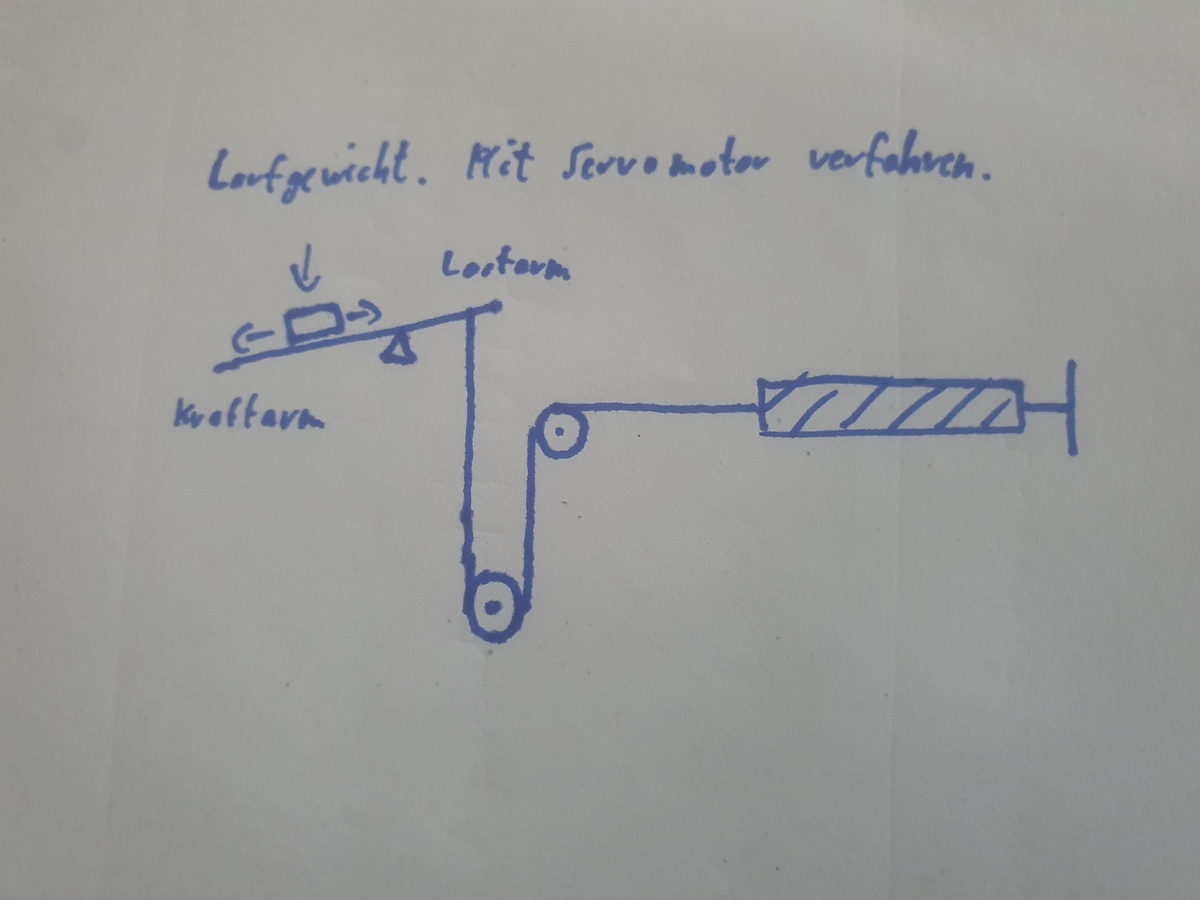
Prinzipskizze Laufgewicht motorisch. Das mit der unmittelbaren Kraftregelung über einen Servo wie Udo S. und Thorsten O. es beschreiben reizt mich. Da bräuchte ich aber ein realisiertes Projekt als Orientierung. Marco
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.