Hallo, ich möchte die Position eines Gleichstrommmotors (15V/1.3A) über einen PI-Regler und PWM regeln. Als Motortreiber habe ich einen L6203 gewählt. Die Software ist soweit fertig, leider habe ich etwas Schwierigkeiten mit der Hardware, da ich darin nicht sehr bewandert bin :) Konkret bereitet mir die Beschaltung des L6203 Probleme. Meine PWM hat eine Grundfreuqenz von 15kHz, der L6203 müsste laut Datenblatt dafür geeignet sein. Die PWM am Eingang sieht auch sauber aus. Am Ausgang sieht man mit dem Oszi allerdings ein füchterlich hässliches Signal. Hat mit Rechteck nicht mehr viel zu tun. Kann sich bitte mal jemand meinen angefügten Schaltplan ansehen. Offensichtlich mache ich etwas völlig falsch. Ich bin mir auch nicht sicher, welche Kondenstatoren eigentlich verwendet werden sollten. Ich habe jetzt nur Keramikkondensatoren verwendet. Ich hoffe, ich trage damit nicht zur allgemeinen Belustigung bei :)Vielleicht kann mir auch jemand erklären, was das Snubber-Netzwerk (R2 und C5) eigentlich macht, und wie man den Widerstand und den Kondensator dimensioniert. Jürgen
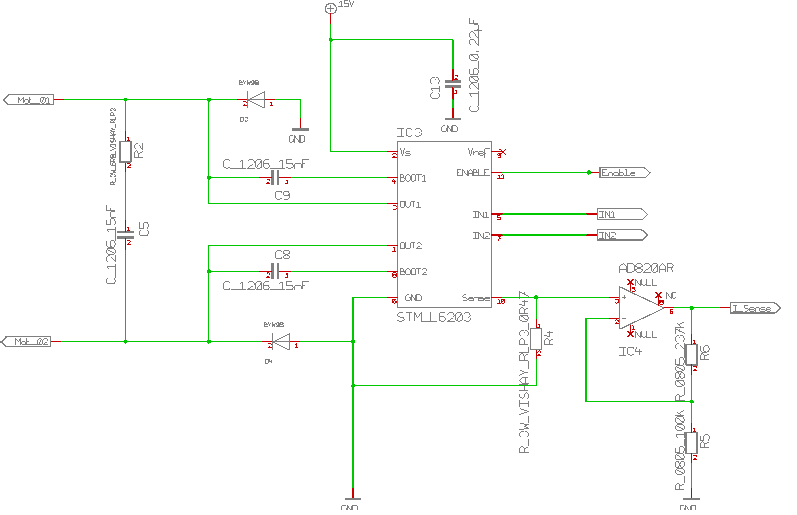
Viel ist nicht zu erkennen. Vref braucht 100nF gegen GND; die Dioden am Ausgang können entfallen. Der Shunt für Sense sollte recht niederohmig sein <= 0,33 Ohm. Die Bootstrap Kondensatoren sollten auch 100nF haben. 15kHz sind auch in Ordnung. Summa summarum müßte am Ausgang ein sauberes Rechteck zu sehen sein.
Ist ein Keramikkondensator im Snubber-Netzwerk in Ordnung? Als Bootstraps benutze ich ebenfalls Keramik-Typen.... Ich steuere den L6302 ohne zusaetzliche Treiber direkt uerber Ausgangspins des Controllers an. Laut Datenblatt sollte auch dies in Ordnung sein, oder habt ihr da andere Erfahrungen gemacht? Juergen
Laß das Schnuppernetzwerk doch einfach weg! Ich vermute mittlerweile, daß Du PWM nicht an den Eingängen sondern an Enable anlegst. Abhängig vom PWM-Tastverhältnis hast Du dann einen angeregten Schwingkreis, dessen Signal grauselig (grauheilig;-) aussehen kann.
Hallo Profibauer, du hast recht, die PWM liegt am Enable-Eingang! Liegt da der Fehler? Juergen
Ja. Wenn Enable inaktiv ist, sind alle FETs im L6203 abgeschaltet, sodaß die Ausgänge "fliegen". Die Induktivität des Motors übernimmt dann wesentlich die Kontrolle über das Ausgangssignal ;-) Bei ohmscher Last hättest Du über dem Lastwiderstand ein sauberes Signal. Enable eignet sich, um den L6203 komplett abzuschalten oder den Strom zu begrenzen (beispielsweise als Schrittmotortreiber). Meine Schaltungen verwenden immer zwei PWM-Ausgänge, um Vor- und Rückwärtslauf eines Motors zu steuern.
Ist folgendes sinnvoll: Enable schalte ich bei aktiver Regelung einfach immer auf High. Das PWM-Signal kommt an den Eingang eines Demultiplexers (z.B. 74LVC1G18). Die Eingänge In_1 und In_2 des 6203 ziehe ich mit einem PullDown standardmäßig auf Low und schließe sie zudem an die beiden Ausänge des '1 auf 2'-Demulitplexers an. Für eine Drehrichtung route ich dass PWM-Signal auf den einen L6203-Eingang, für die andere Drehrichtung auf den anderen. Durch die PullDowns ist der Eingang, auf dem die PWM nicht anliegt immer Low, der andere wird per PWM angesteuert. Wenn die PWM auf auf low geht, dann stehen beide Ausgänge auf 'Sink'. Macht das Sinn?
Du kannst einen Demultiplexer nehmen. Vielleicht reicht auch ein 4-fach XOR-Gatter. Wenn ich hingegen zwei PWMs nehme, liegt das auch daran, daß ich ab und zu zwei Motore ohne Richtungsumkehr verwende. Du wirst sicherlich eine passende Lösung für Dich finden.
Hallo Kollegen, Ähhhh, natürlich kommt das PWM Signal an den Enable Eingang des L6203. Für das Umschalten der Drehrichtung bzw. für gesteuertes Bremsen (Beide Eingänge High oder beide Eingänge Low) werden dann normale Steuerausgänge des Mikrokontrollers verwendet. Gibt man den PWM auf die Drehrichtungsausgänge gibt es zwar ein schönes Rechtecksignal am Ausgang zum Motor, wer aber den Strom den Shunt misst stellt fest das der Motor zwischen antreiben und bremsen hin und her geschaltet wird. Nicht besonders energieeffizient und im Dauerbetrieb sicher ein Grund für den frühzeitigen Tod des L6302. Noch schlimmer wenn die beiden High Side Transistoren durchgeschaltet werden. Das werden die Bremsstromspitzen gar nicht im Shunt erkannt. das die Ausgangsspannung dann so seltsam aussieht liegt an der Gegen EMK des Motors, also der Spannung die der Motor liefert, wenn man ihne dreht und an den Klemmen misst. Und die, wenn man sie so hübsch kurzschließt wie hier vorgeschlagen den Motor heftig bremst. Wer meint das ist nicht viel der sollte mal den Motor aus vollem Lauf auf Bremsen umschalten. der springt vor Freue vom Tisch und das dann mit 15 KHz.....
Wohin denn nun? INs oder Enable? Habe ich das richtig verstanden:
T1 T3
-Motor-
T2 T4
An Enable bedeutet:
PWM=High: T1 und T4 leiten, T3 und T2 sperren. Strom fließt durch
Motor.
PWM=Low : Kein Transistor leitet, der Motor "hängt in der Luft".
Magnetisierung treibt Strom weiter über D2 und D3?
An IN bedeutet:
PWM=High: T1 und T4 leiten, T3 und T2 sperren. Strom fließt durch
Motor.
PWM=Low : T2 und T4 leiten. T1 und T2 sperren. Strom fließt durch
Magnetisierung weiter über T4 und T2
Was ist davon nun zu bevorzugen? Bremst der Motor wenn die beiden
Unteren FETs leiten, weil er kurzgeschlossen ist, oder bremst er wenn er
seinen Strom über die Dioden zurück in die Versorgung schieben muss?
@ Stephan Meter (multimeter90) >Was ist davon nun zu bevorzugen? Bremst der Motor wenn die beiden >Unteren FETs leiten, weil er kurzgeschlossen ist, Ja. > oder bremst er wenn er seinen Strom über die Dioden zurück in die > Versorgung schieben muss? Sehr wenig. MfG Falk
Danke für die schnelle Antwort. Also PWM an Enable und mit IN1 und In2 die Richtung regeln. Supi.
Henrik Haftmann schrieb: > Diese Antwort ist falsch! Deine Antwort ist aber auch wenig hilfreich. WAS ist falsch an der Antwort? WARUM ist sie deiner Meinung nach falsch? WAS ist die RICHTIGE Antwort?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.