Hi Leute, ich würde mir gern einen eigenen CAN-Bus aufziehen. Dazu hab ich mir den dsPIC30f6014 von Microchip zugelegt und ein passendes Board dazu. Jetzt würde ich gerne prinzipiell eine Nachricht auf Tastendruck eine Nachricht senden, diese dann verzögert wieder empfangen ( geschieht über 2tes Board). Hört sich doch eigentlich ganz einfach an, aber meine Probleme gehen leider schon beim initialisieren des CAN`s schief.... Kann mir da jemand helfen? Oder gibts irgendwo ein BSP. zum anschauen und lernen? Thx Tom
i made some changes in my file, but it doesn't work. the can-port
wouldn`t send the message...is there anyone who can help me?
thx
#include "p30f6014.h"
#include "can.h"
/* ***********************************
included functions
can_clk_init
can_init
can_receive
can_transmit
*********************************** */
void can_clk_init (void) // Initialize CAN_CLK
{
// ***********************************
// CAN1 Control Register
// FCAN Clock = FCY
C1CTRLbits.CANCKS = 0x1; // Bit CANCKS set 1
// ***********************************
// CAN1 Baud Rate Control Register
// PHASE Segment 1 = 8TQ
// PHASE Segment 2 = 6TQ
// Propagation Delay = 5TQ
// Synchronization Jump width = 4TQ
// Baud Rate Prescaler = BRP_VAL defined in can.h
// Sync. Segment = 1TQ
// Phase Segment 2 Time select bit = 6TQ
C1CFG1bits.BRP = BRP_VAL; // Bit BRP set BRP_VAL
C1CFG1bits.SJW = 0x3; // Bit SJW set 11
C1CFG2bits.PRSEG = 0x4; // Bit PRSEG set 100
C1CFG2bits.SEG1PH = 0x7; // Bit SEG1PH set 111
C1CFG2bits.SAM = 0x1; // Bit SAM set 1
C1CFG2bits.SEG2PHTS = 0x1; // Bit SEG2PHTS set 1
C1CFG2bits.SEG2PH = 0x5; // Bit SEG2PH set 101
}
void can_init (void) // Initialisier CAN
{
// ***********************************
// Request Configuration Mode
// Request Operation Mode = 4
C1CTRLbits.REQOP = 0x4; // Bit REQ0P set 100
while (C1CTRLbits.OPMODE != 0x4);
can_clk_init();
// ***********************************
// Filter configuration
// Standard Identifier
// Standard Identifier Bit = 1111111111
// Extendes Identifier Enable Bit = 0 (MIDE = 1)
C1RXF0SIDbits.EXIDE = 0x0; // Filter 0
C1RXF0SIDbits.SID = 0x3FF;
// Extended Identifier
// not included -> MIDE disabled
// ***********************************
// Mask Configuration
// Standard Identifier
// Identifier Mode Selection Bit = 0
// Standard Identifier Mask Bit = 1111111111
C1RXM0SIDbits.MIDE = 0x1; // Bit Mide set 1
C1RXM0SIDbits.SID = 0x3FF; // BIT SID set
// Extended Identifier
// not included
// ***********************************
// Normal Mode
// Request Operation Mode = 0
C1CTRLbits.REQOP = 0x0; // Bit REQ0P set 000
while(C1CTRLbits.OPMODE != 0x0);
}
void can_receive (void)
{
}
void can_transmit (void)
{
// Message Transmit Priority Level 00
C1TX0CONbits.TXPRI = 0x0 ; // Bit TXPRI set 00
}
Hi Ich hab mit dem CAN-Modul leider noch nichts gemacht, aber probiers mal im Microchip Forum oder im Fernando Heitor Forum. forum.microchip.com www.fernando-heitor.com mfg schoasch
PS.: Schreib dann auch dazu was sich nicht tut. Schickst du irgendwas hinaus? Hast du das mit dem OSzi geprüft?
also danke für die beiden posts, ich hab mal unter beiden geschaut und auch gepostet, bin mal gespannt. was nicht geht: eigentlich wollt ich eine folge von bits ausgeben lassen und mit dem oszi anzeigen, also erst so, bevor ich an das 2te board gehe, aber ich bekomm nichts raus, und ich vermute, dass es an der init liegt...
da kommt nichts raus, aber rein gar nichts..aber ich hab jetzt glaub ich was entdeck, wenn ich schritt für schritt debugge, dann hängt mir das progi in einer schleife fest und geht nimmer raus (schleife im normal mode) und dann kann ich ja net weitermachen, wenns da immer hängt
Poste doch mal dein komplettes Projekt, dann kann man leichter nachvollziehen was du machst.
hier mal das ganze projekt, nur die dspic30f6014.h und die dazugehörige
*.gld hab ich jetzt nicht mit gepostet....
problemstellung: Ich bekomm keine Datan am Can-port ausgegeben
Board: dspicdem 1.1 von microchip
Controller: dspic30f6014
programm: mplab
compiler: c30
programmer: icd 2
wenn mir da jemand weiterhelfen könnt, wäre ich dankbar
code below:
-main.c
-can.c
-can.h
-global_variables.c
-global_variables.h
-define_portpins.h
*******************main.c***********************
#include <stdio.h>
#include "p30f6014.h"
#include "can.h"
#include "global_variables.h"
#include "define_portpins.h"
int main (void)
{
TRISA = 0xF000;
TRISB = 0x017B;
TRISC = 0x0000;
PORTD = 0x00EF;
TRISD = 0x0010;
PORTF = 0x002A;
TRISF = 0x0055;
TRISG = 0x1080;
// enable interrupts
C1INTE = 0x00FF;
// set operation mode
can_set_op_mode_1();
while (C1CTRLbits.OPMODE <=3);
// load configuration register
can_init();
// load acceptance filter
can_acceptance_filter();
// load mask filter
can_mask();
// set transmit and receive mode
can_tx_mode();
can_rx_mode();
// load message ID, data_transmit -> transmit buffer, transmit request
bit
unsigned char *tx_data_ptr;
tx_data_ptr = &tx_data[0];
can_transmit(tx_data_ptr);
// set operation mode
can_set_op_mode_2();
while (C1CTRLbits.REQOP !=2);
// wait till transmit is finished
while (!C1TX0CONbits.TXREQ);
// wait till receive buffer contains message
while (C1RX0CONbits.RXFUL);
// received data -> data_received
unsigned char *rx_data_ptr;
rx_data_ptr = &rx_data[0];
can_receive(rx_data_ptr);
// loop
while (1);
return 0;
}
**********************can.c************************
#include "can.h"
#include "p30f6014.h"
#include "global_variables.h"
void can_set_op_mode_1()
{
C1CTRLbits.CSIDL = 0x0; // continue can modul operation in idle mode
C1CTRLbits.CANCKS = 0x1; // fcan = fcy
C1CTRLbits.REQOP = 0x4; // set operation mode
}
void can_init()
{
C1CFG1bits.SJW = 0x1; // synchronized jump width = 01
C1CFG1bits.BRP = 0x3F; // baud rate 128/fcsn
C1CFG2bits.WAKFIL = 0x0; // can bus line filter is not used for wake
up
C1CFG2bits.SEG2PH = 0x4; // phase buffer segment 2 = 100
C1CFG2bits.SEG2PHTS = 0x1; // phase segment 2 time select = freely
programmable
C1CFG2bits.SAM = 0x0; // sample can bus line = 0 (1x)
C1CFG2bits.SEG1PH = 0x3; // phase buffer segment 1 = 011
C1CFG2bits.PRSEG = 0x3; // propagation time = 011
}
void can_acceptance_filter()
{
C1RXF0SID = 0x555; // standard identifier bits
C1RXF0SIDbits.EXIDE = 0x1; // enable filter SID=0 EID=1
C1RXF0EIDH = 0xAAA; // extended identifier bits upper byte
C1RXF0EIDL = 0x2A; // extended identifier bits lower byte
}
void can_mask()
{
C1RXM0SID = 0x2AA; // standard identifier mask bits
C1RXM0SIDbits.MIDE = 0x0; // identifier mode 0
C1RXM0EIDH = 0x555; // extended identifier mask bits upper byte
C1RXM0EIDL = 0x25; // extendet identifier mask bits lower byte
}
void can_tx_mode()
{
C1TX0CONbits.TXPRI = 0x2; // message transmission priority (high = 10)
C1TX0CONbits.TXREQ = 0x0; // message send request bit (1 = request)
}
void can_rx_mode()
{
C1RX0CONbits.DBEN = 0x1; // receive buffer 0 double buffer enable bit
C1RX0CONbits.RXFUL = 0x0; // receive full status (buffer open = 0)
}
void can_transmit(unsigned char *data)
{
int i;
C1TX0SID = 0x2AA; // standard identifier bits
C1TX0EID = 0x1555; // extended identifier bits
for(i=0;i<data_length;i++)
{
*((unsigned char *)&C1TX0B1+i) = data;
}
C1TX0DLCbits.DLC = data_length; // data length code bits
C1TX0CONbits.TXREQ = 0x1; // message send request bit
}
void can_set_op_mode_2()
{
C1CTRLbits.CSIDL = 0x0; // continue can modul operation in idle mode
C1CTRLbits.CANCKS = 0x1; // fcan = fcy
C1CTRLbits.REQOP = 0x2; // set loopback mode
C1CTRLbits.CANCAP = 0x0; // can message receive capture disable
}
void can_receive(unsigned char *data)
{
int i;
for(i = 0;i<data_length;i++)
{
data = *((unsigned char *)&C1RX0B1+i);
}
C1RX0CONbits.RXFUL = 0x0; // receive full status bit
}
***********************can.h*******************************
extern void can_set_op_mode_1();
extern void can_init();
extern void can_acceptance_filter();
extern void can_mask();
extern void can_tx_mode();
extern void can_rx_mode();
extern void can_transmit(unsigned char *);
extern void can_set_op_mode_2();
extern void can_receive( unsigned char *);
************************global_variables.c**************************
#include "global_variables.h"
unsigned char tx_data[data_length] ={1,0,1,0,1,0,1,0};
unsigned char rx_data[data_length];
***********************define_portpins.h**************************
#include "p30f6014.h"
#define LED1 LATDbits.LATD0
#define LED2 LATDbits.LATD1
#define LED3 LATDbits.LATD2
#define LED4 LATDbits.LATD3
#define LEDS_OFF (LATD |= 0x000F)
#define LEDS_ON (LATD &= 0xFFF0)
#define _CS_LCD PORTGbits.RG9
#define _CS_POTI PORTDbits.RD7
#define CAN_RXD PORTFbits.RF0
#define CAN_TXD PORTFbits.RF1
#define CTS PORTDbits.RD4
#define RTS PORTDbits.RD5
***********************global_variables.h**********************
#define data_length 8
extern unsigned char rx_data[data_length];
extern unsigned char tx_data[data_length];
**********************assemlby code****************************
--- P:\CAN-BUS\Sender\can.c
--------------------------------------------------------------------
1: #include "can.h"
2: #include "p30f6014.h"
3: #include "global_variables.h"
4:
5: void can_set_op_mode_1()
6: {
0001EC FA0000 lnk #_dinit_tblpage
7: C1CTRLbits.CSIDL = 0x0; // continue can modul
operation in idle mode
0001EE A9A391 bclr.b 0x391,#5
8: C1CTRLbits.CANCKS = 0x1; // fcan = fcy
0001F0 A86391 bset.b 0x391,#3
9: C1CTRLbits.REQOP = 0x4; // set operation mode
0001F2 203911 mov.w #0x391,w1
0001F4 784091 mov.b [w1],w1
0001F6 B3CF80 mov.b #0xf8,w0
0001F8 60C000 and.b w1,w0,w0
0001FA A02400 bset w0,#2
0001FC B7E391 mov.b w0,0x391
10: }
0001FE FA8000 ulnk
11:
12: void can_init()
13: {
000202 FA0000 lnk #_dinit_tblpage
14: C1CFG1bits.SJW = 0x1; // synchronized jump width
= 01
000204 BFC392 mov.b C1CFG1bits,w0
000206 B243F0 and.b #0x3f,w0
000208 B3C401 mov.b #0x40,w1
00020A 704001 ior.b w0,w1,w0
00020C B7E392 mov.b w0,C1CFG1bits
15: C1CFG1bits.BRP = 0x3F; // baud rate 128/fcsn
00020E 203921 mov.w #0x392,w1
000210 784091 mov.b [w1],w1
000212 B3C3F0 mov.b #0x3f,w0
000214 70C000 ior.b w1,w0,w0
000216 B7E392 mov.b w0,C1CFG1bits
16: C1CFG2bits.WAKFIL = 0x0; // can bus line filter is
not used for wake up
000218 A9C395 bclr.b 0x395,#6
17: C1CFG2bits.SEG2PH = 0x4; // phase buffer segment 2
= 100
00021A 203951 mov.w #0x395,w1
00021C 784091 mov.b [w1],w1
00021E B3CF80 mov.b #0xf8,w0
000220 60C000 and.b w1,w0,w0
000222 A02400 bset w0,#2
000224 B7E395 mov.b w0,0x395
18: C1CFG2bits.SEG2PHTS = 0x1; // phase segment 2 time
select = freely programmable
000226 A8E394 bset.b C1CFG2bits,#7
19: C1CFG2bits.SAM = 0x0; // sample can bus line = 0
(1x)
000228 A9C394 bclr.b C1CFG2bits,#6
20: C1CFG2bits.SEG1PH = 0x3; // phase buffer segment 1
= 011
00022A 203941 mov.w #0x394,w1
00022C 784091 mov.b [w1],w1
00022E B3CC70 mov.b #0xc7,w0
000230 60C000 and.b w1,w0,w0
000232 B34180 ior.b #0x18,w0
000234 B7E394 mov.b w0,C1CFG2bits
21: C1CFG2bits.PRSEG = 0x3; // propagation time = 011
000236 203941 mov.w #0x394,w1
000238 784091 mov.b [w1],w1
00023A B3CF80 mov.b #0xf8,w0
00023C 60C000 and.b w1,w0,w0
00023E B34030 ior.b #0x3,w0
000240 B7E394 mov.b w0,C1CFG2bits
22: }
000242 FA8000 ulnk
23:
24: void can_acceptance_filter()
25: {
000246 FA0000 lnk #_dinit_tblpage
26: C1RXF0SID = 0x555; // standard identifier bits
000248 205550 mov.w #0x555,w0
00024A 881800 mov.w w0,CAN1
27: C1RXF0SIDbits.EXIDE = 0x1; // enable filter SID=0
EID=1
00024C A80300 bset.b CAN1,#0
28: C1RXF0EIDH = 0xAAA; // extended identifier bits
upper byte
00024E 20AAA0 mov.w #0xaaa,w0
000250 881810 mov.w w0,C1RXF0EIDHbits
29: C1RXF0EIDL = 0x2A; // extended identifier bits
lower byte
000252 2002A0 mov.w #0x2a,w0
000254 881820 mov.w w0,C1RXF0EIDL
30: }
000256 FA8000 ulnk
31:
32: void can_mask()
33: {
00025A FA0000 lnk #_dinit_tblpage
34: C1RXM0SID = 0x2AA; // standard identifier mask
bits
00025C 202AA0 mov.w #0x2aa,w0
00025E 881980 mov.w w0,C1RXM0SID
35: C1RXM0SIDbits.MIDE = 0x0; // identifier mode 0
000260 A90330 bclr.b C1RXM0SID,#0
36: C1RXM0EIDH = 0x555; // extended identifier mask
bits upper byte
000262 205550 mov.w #0x555,w0
000264 881990 mov.w w0,C1RXM0EIDH
37: C1RXM0EIDL = 0x25; // extendet identifier mask
bits lower byte
000266 200250 mov.w #0x25,w0
000268 8819A0 mov.w w0,C1RXM0EIDLbits
38: }
00026A FA8000 ulnk
39:
40: void can_tx_mode()
41: {
00026E FA0000 lnk #_dinit_tblpage
42: C1TX0CONbits.TXPRI = 0x2; // message transmission
priority (high = 10)
000270 2036E1 mov.w #0x36e,w1
000272 784091 mov.b [w1],w1
000274 B3CFC0 mov.b #0xfc,w0
000276 60C000 and.b w1,w0,w0
000278 A01400 bset w0,#1
00027A B7E36E mov.b w0,C1TX0CON
43: C1TX0CONbits.TXREQ = 0x0; // message send request
bit (1 = request)
00027C A9636E bclr.b C1TX0CON,#3
44: }
00027E FA8000 ulnk
45:
46: void can_rx_mode()
47: {
000282 FA0000 lnk #_dinit_tblpage
48: C1RX0CONbits.DBEN = 0x1; // receive buffer 0
double buffer enable bit
000284 A8438E bset.b C1RX0CONbits,#2
49: C1RX0CONbits.RXFUL = 0x0; // receive full status
(buffer open = 0)
000286 A9E38E bclr.b C1RX0CONbits,#7
50: }
000288 FA8000 ulnk
51:
52: void can_transmit(unsigned char *data)
53: {
00028C FA0004 lnk #WREG2
54: int i;
55:
56: C1TX0SID = 0x2AA; // standard identifier bits
000290 202AA0 mov.w #0x2aa,w0
000292 881B00 mov.w w0,C1TX0SIDbits
57: C1TX0EID = 0x1555; // extended identifier bits
000294 215550 mov.w #0x1555,w0
000296 881B10 mov.w w0,C1TX0EIDbits
58:
59: for(i=0;i<data_length;i++)
000298 EB0000 clr.w w0
00029A 780F00 mov.w w0,[w14]
00029C 37000B bra .L14
0002B2 E80F1E inc.w [w14],[w14]
0002B4 200070 mov.w #0x7,w0
0002B6 100F9E subr.w w0,[w14],[w15]
0002B8 34FFF2 bra les, .L15
60: {
61: *((unsigned char *)&C1TX0B1+i) = data;
00029E 78001E mov.w [w14],w0
0002A0 780080 mov.w w0,w1
0002A2 203660 mov.w #0x366,w0
0002A4 408100 add.w w1,w0,w2
0002A6 78001E mov.w [w14],w0
0002A8 780080 mov.w w0,w1
0002AA 90001E mov.w [w14+2],w0
0002AC 408000 add.w w1,w0,w0
0002AE 784010 mov.b [w0],w0
0002B0 784900 mov.b w0,[w2]
62: }
63:
64: C1TX0DLCbits.DLC = data_length; // data length code
bits
0002BA 203641 mov.w #0x364,w1
0002BC 784091 mov.b [w1],w1
0002BE B3C870 mov.b #0x87,w0
0002C0 60C000 and.b w1,w0,w0
0002C2 B3C401 mov.b #0x40,w1
0002C4 704001 ior.b w0,w1,w0
0002C6 B7E364 mov.b w0,C1TX0DLC
65: C1TX0CONbits.TXREQ = 0x1; // message send
request bit
0002C8 A8636E bset.b C1TX0CON,#3
66:
67: }
0002CA FA8000 ulnk
68:
69: void can_set_op_mode_2()
70: {
0002CE FA0000 lnk #_dinit_tblpage
71: C1CTRLbits.CSIDL = 0x0; // continue can modul
operation in idle mode
0002D0 A9A391 bclr.b 0x391,#5
72: C1CTRLbits.CANCKS = 0x1; // fcan = fcy
0002D2 A86391 bset.b 0x391,#3
73: C1CTRLbits.REQOP = 0x2; // set loopback mode
0002D4 203911 mov.w #0x391,w1
0002D6 784091 mov.b [w1],w1
0002D8 B3CF80 mov.b #0xf8,w0
0002DA 60C000 and.b w1,w0,w0
0002DC A01400 bset w0,#1
0002DE B7E391 mov.b w0,0x391
74: C1CTRLbits.CANCAP = 0x0; // can message receive
capture disable
0002E0 A9E391 bclr.b 0x391,#7
75: }
0002E2 FA8000 ulnk
76:
77: void can_receive(unsigned char *data)
78: {
0002E6 FA0004 lnk #WREG2
79: int i;
80:
81: for(i = 0;i<data_length;i++)
0002EA EB0000 clr.w w0
0002EC 780F00 mov.w w0,[w14]
0002EE 37000B bra .L21
000304 E80F1E inc.w [w14],[w14]
000306 200070 mov.w #0x7,w0
000308 100F9E subr.w w0,[w14],[w15]
00030A 34FFF2 bra les, .L22
82: {
83: data = *((unsigned char *)&C1RX0B1+i);
0002F0 78001E mov.w [w14],w0
0002F2 780080 mov.w w0,w1
0002F4 90001E mov.w [w14+2],w0
0002F6 408100 add.w w1,w0,w2
0002F8 78001E mov.w [w14],w0
0002FA 780080 mov.w w0,w1
0002FC 203860 mov.w #0x386,w0
0002FE 408000 add.w w1,w0,w0
000300 784010 mov.b [w0],w0
000302 784900 mov.b w0,[w2]
84: }
85:
86: C1RX0CONbits.RXFUL = 0x0; // receive full status
bit
00030C A9E38E bclr.b C1RX0CONbits,#7
87: }
00030E FA8000 ulnk
--- P:\CAN-BUS\Sender\main.c
35:
36: #include <stdio.h>
37: #include "p30f6014.h"
38: #include "can.h"
39: #include "global_variables.h"
40: #include "define_portpins.h"
41:
42: int main (void)
43: {
000180 FA0004 lnk #WREG2
44: TRISA = 0xF000;
000182 2F0000 mov.w #0xf000,w0
000184 881600 mov.w w0,TRISAbits
45: TRISB = 0x017B;
000186 2017B0 mov.w #0x17b,w0
000188 881630 mov.w w0,TRISBbits
46: TRISC = 0x0000;
00018A EB0000 clr.w w0
00018C 881660 mov.w w0,TRISC
47: PORTD = 0x00EF;
00018E 200EF0 mov.w #0xef,w0
000190 8816A0 mov.w w0,PORTD
48: TRISD = 0x0010;
000192 200100 mov.w #0x10,w0
000194 881690 mov.w w0,TRISD
49: PORTF = 0x002A;
000196 2002A0 mov.w #0x2a,w0
000198 881700 mov.w w0,PORTFbits
50: TRISF = 0x0055;
00019A 200550 mov.w #0x55,w0
00019C 8816F0 mov.w w0,TRISF
51: TRISG = 0x1080;
00019E 210800 mov.w #0x1080,w0
0001A0 881720 mov.w w0,TRISG
52:
53: // enable interrupts
54:
55: C1INTE = 0x00FF;
0001A2 200FF0 mov.w #0xff,w0
0001A4 881CC0 mov.w w0,C1INTEbits
56:
57: // set operation mode
58:
59: can_set_op_mode_1();
0001A6 70022 rcall can_set_op_mode_1
60: while (C1CTRLbits.OPMODE <=3);
0001A8 BFC390 mov.b C1CTRLbits,w0
0001AA FB8000 ze.b w0,w0
0001AC DE0045 lsr w0,#5,w0
0001AE FB8000 ze.b w0,w0
0001B0 500FE3 sub.w w0,#3,[w15]
0001B2 34FFFA bra les, .L2
61:
62: // load configuration register
63:
64: can_init();
0001B4 70026 rcall can_init
65:
66: // load acceptance filter
67:
68: can_acceptance_filter();
0001B6 70047 rcall can_acceptance_filter
69:
70: // load mask filter
71:
72: can_mask();
0001B8 70050 rcall can_mask
73:
74: // set transmit and receive mode
75:
76: can_tx_mode();
0001BA 70059 rcall can_tx_mode
77: can_rx_mode();
0001BC 70062 rcall can_rx_mode
78:
79: // load message ID, data_transmit -> transmit buffer,
transmit request bit
80:
81: unsigned char *tx_data_ptr;
82: tx_data_ptr = &tx_data[0];
0001BE 208080 mov.w #0x808,w0
0001C0 980710 mov.w w0,[w14+2]
83:
84: can_transmit(tx_data_ptr);
0001C2 90001E mov.w [w14+2],w0
0001C4 70063 rcall can_transmit
85:
86: // set operation mode
87:
88: can_set_op_mode_2();
0001C6 70083 rcall can_set_op_mode_2
89: while (C1CTRLbits.REQOP !=2);
0001C8 BFC391 mov.b 0x391,w0
0001CA 604067 and.b w0,#7,w0
0001CC 504FE2 sub.b w0,#2,[w15]
0001CE 3AFFFC bra nz, .L4
90:
91: // wait till transmit is finished
92:
93: while (!C1TX0CONbits.TXREQ);
0001D0 BFC36E mov.b C1TX0CON,w0
0001D2 604068 and.b w0,#8,w0
0001D4 E00400 cp0.b w0
0001D6 32FFFC bra z, .L5
94:
95: // wait till receive buffer contains message
96:
97: while (C1RX0CONbits.RXFUL);
0001D8 BFC38E mov.b C1RX0CONbits,w0
0001DA B3C801 mov.b #0x80,w1
0001DC 604001 and.b w0,w1,w0
0001DE E00400 cp0.b w0
0001E0 3AFFFB bra nz, .L6
98:
99: // received data -> data_received
100:
101: unsigned char *rx_data_ptr;
102: rx_data_ptr = &rx_data[0];
0001E2 208000 mov.w #0x800,w0
0001E4 780F00 mov.w w0,[w14]
103:
104: can_receive(rx_data_ptr);
0001E6 78001E mov.w [w14],w0
0001E8 7007E rcall can_receive
105:
106: // loop
107:
108: while (1);
0001EA 37FFFF bra .L8
thanks :-)
OK, das meinte ich nicht. Das ist das Disassembly listing. Ich habe gemeint, dass du dein komplettes projekt packst und die gepackte datei hier in den anhang hängst. Dann kann man die dateien mit mplab simulieren.
kein thema, hab ich falsch verstanden... hab noch ein fehler gefunden..und zwar waren die configuration bits falsch...gesetzt, also in mplab, habs jetzt ins progi mit eingebunden... mach gerade nen neuen test thx
Wunderbar, so kann man da was machen.
Erst mal allgemeine C Sachen:
- Variablen am Anfang eines Blocks deklarieren, nicht mittendrin
- Am Ende von Main steht return 1;
Das würde bedeuten, dass main mit einem Fehler beendet wurde.
Da er da eh nicht hinkommt deklarier die main einfach als void.
- schreib alles was du zur initialisierung brauchst in die CAN Init
Funktion.
Dann muss man beim lesen nicht dauernd springen.
In der Main sollte dann nur noch stehen:
can_init();
can_senden(...);
while(1);
Zum CAN Problem.
- Wo genau bleibt er hängen, wenn du ihn mit dem Debugger laufen lässt?
- Versuchst du den CAN in den Loopback Mode zu versetzen?
-> Dann kanns nicht gehen
- Wie bist du auf den Code gekommen?
Mich wundert dass du das alles ohne Interrupt machen willst.
* also mit dem debugger bleibt er nur hängen, bzw. bleibt in der while schleife, wenn ich auf die empfangene nachricht abfrage, ansonsten läuft der durch... while (C1RX0CONbits.RXFUL); * ja, ich setz den CAN in den loopbackmode, ist das falsch? * wieso ohne interrupt? kann ich nicht wirklich gut...also interrupt routinen aufrufen und richtig behandeln...aber werd dass dann später noch versuchen, wenn das jetzt so mal irgendwann laufen sollte * das ich am Oszi nichts darstellen kann, also die frames, liegt das am loopbackmode? * das mit dem return 1; habe ich schon geändert gehabt, war nur ein fehler, der mir erst nach dem posten aufgefallen ist... * bei void main(void) gibt der c30 nen fehler raus, dass da ein int hin muss...(Version 6.6 hier auf dem rechner, bei version 7.6 nimmt er auch das void)
und das mit dem code ist überlegens- und probiersache... ich hab mich durch den ganzen papierkram gewühlt und mir das versucht irgendwie zu verinnerlichen...hab auch schon im netz rumgesucht, aber da findet sich nicht wirklich was zum can mid dem dspic30f6014... Stimmt das was ich im code mach? oder hab ich da noch nen großen verständnissfehler? z.b. ist mir noch nicht klar, wie das mit den buffern ist. wenn ich die daten in den buffer schiebe und den dann sende, woher weiß das prog. wohin er die buffer ausgeben muss? ich hab zwar in der define_portpins: #define CAN_RXD PORTFbits.RF0 #define CAN_TXD PORTFbits.RF1 die sache deklariert, aber wirklich an CAN_*XD übergeben tu ich nich
muss ich statt in den loopback mode in den normal operation mode (000)? loopback brauch ich dann für was? ? wenn ich ein echo an den selben pic zurücksenden will?
okay, die eine frage mit dem mode hat sich geklärt: Normal Operation Mode Normal Operating mode is selected when REQOP<2:0> = ‘000’. In this mode, the module is activated, the I/O pins will assume the CAN bus functions. The module will transmit and receive CAN bus messages as described in subsequent sections. Loopback Mode If the Loopback mode is activated, the module will connect the internal transmit signal to the internal receive signal at the module boundary. The transmit and receive pins revert to their PORT I/O function. The transmitter will receive an acknowledge for its sent messages. Special hardware will generate an acknowledge for the transmitter. dann ist mir schon klar, wieso ich da nix sehe...
Genau. Hasts ja schon selbst rausgefunden. Wenn du code zu dem CAN Modul suchst, kannst du auch ma bei den Code Examples von den 33ern schauen. Die haben zwar ein anderes CAN Modul, die Befehle sind aber weitestgehend gleich. Kommt was raus, wenn du nicht in den loopback modus gehst?
ja und wie, bin gerade dabei das signal mit dem oszi darzustellen und den frame auseinander zu nehmen, damit ich seh obs richtige raus kommt... wie ist das mit den SID und EID? gibts da was zu beachten? stimmen die so in meinem progi?
Was heisst stimmen die? Soweit ich sehe, hast du die Eingangsfilter und Masken gesetzt. mit dem Senden hat das nichts zu tun. Das heisst nur, dass nicht alle CAN Nachrichten empfangen werden, sondern nur diejenigen, die von Filter und Maske akzeptiert wurden. Aber das was rauskommt ist schon mal sehr gut. Bei SID und EID musst du eigentlich nichts beachten. Ich würde dir raten für den Anfang nur SID zu verwenden und Filter und Maske so einzustellen, dass alles durchgelassen wird.
ah okay, mit dem SID, bzw. EID stelle ich dann an den einzelnen Knoten ein, welche der vielen nachrichten empfangen werden kann, bzw. werden darf. ist also bildlich die adresse des senders (also die maske) und der filter entscheidet dann, ob angenommen werden darf via vergleich?
Knoten A: SID: 1 Filter: 2 Knoten B: SID: 2 Filter: 1 ----> Knoten B, kann nachrichten von A empfangen und umgekehrt, wenn jetzt aber eine nachricht mit SID: 3 kommt, dann kann weder A noch B empfangen?
Hast du das getestet? Ich hab dich gesagt, du sollst erst mal Filter und Maske weglassen. Das macht dir nur Probleme, wenn dus nicht 100%ig verstanden hast. Damit kannst du dich auseinandersetzen wenn der rest geht. Setz mal alle Masken auf 0, dann müssten auch alle IDs durchkommen.
also wenn ich alle masken auf 0 gesetzt habe, dann geht alles durch, wie du geschrieben hast...
weißt du was der unterschied zwischen message acceptance filter (CiRXFnSID) und acceptance filter mask (CiRXMnSID) ist?
Ja. Mit der Maske kannst du die eintreffende ID maskieren. damit sagst du im Prinzip welche Bits der ID überhaupt gefiltert werden sollen. Wenn Maske = 0 wird kein Bit gefiltert. Wenn Maske = 0x7FF kommen alle Bits in den Filter.
also irgendwie check ich das nicht.... ich bekomme vom bus einmal den identifier und die daten identifier -> SID oder EID dann habe ich den filter und die maske kannst du mir das irgendwie an einem bsp. erklären? z.b. SID = 0x3BF = 1111011111 -> das ist der SID, der vom Knoten B stammt Knoten A empfängt SID und Data Filter & Maske ?
Ich hoff ich erzähl dir jetzt kein blödsinn. ich habe die filter noch nicht oft benutzt. Filtern kannst du nur die IDs. Vergiss erst mal die EIDs. Angenommen du willst alle ungeraden IDs wegfiltern: Maske: 1 // für unterstes Bit Filter: 0 // Alle geraden erlauben wenn du die geraden weghaben willst, mach folgendes: Maske: 1 // für unterstes Bit Filter: 1 // Alle ungeraden erlauben Alle Angaben ohne Gewähr ;-)
aha, also muss ich mir das so vorstellen: SID = 0x7BF = 11111011111 Knoten B Acceptance mask: Knoten A CiRXMnSID = 0x000 = 00000000000 -> alle kommenden id`s werden durchgelassen CiRXMnSID = 0x700 = 11100000000 -> nur die bits <10:8> werden an den filter weitergegeben Acceptance filter: Knoten A CiRXFnSID = 0x 7FF = 11111011111 -> nur diese ID wird erlaubt -> alle bits werden verglichen, message kommt nur durch, wenn bits, die durch die maske kommen mit filter übereinstimmen ???
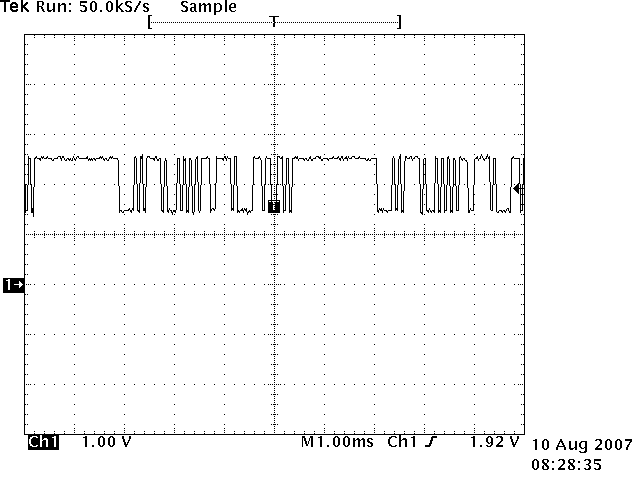
Angehängte Dateien:
-

TEK00008.png
2 KB
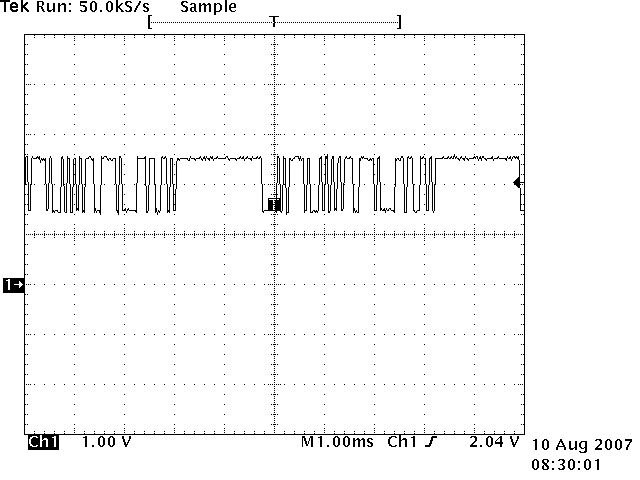
gut dann hab ich das jetzt verstanden.... jetzt ist mir gerade noch was anderes aufgefallen: wenn ich das signal am scope anschaue das ich sende...ist das immer gleich...egal, ob ich daten im register C1TX0B1 = 0xFF stehen hab oder net... das was über den CANH rausgeht sollte doch normalerweise so aufgebaut sein: Start of frame <1> SID <11> RTR <1> IDE <1> RB0 <1> DLC <4> Data <8> CRC <16> ACK <2> End of Frame <7> <anzahl der bits> im anhang hab ich die beiden scope-auszüge einmal mit C1TX0B1 = 0x0 und dann mit 0xFF --> wenn ich mir das so anschau, dann mach ich doch wohl noch irgendwo einen fehler....
Hast du zwei Knoten verbunden? Wenn die CAN Nachricht niemand empfängt und bestätigt, wird sie ständig weitergesendet.
ich hab nur einen knoten...vorerst...den zweiten knoten bau ich aber genauso auf wie den ersten, änder nur die sid und die maske ab... das die nachricht ständig gesendet wird, klar..hab ich ja so ins prog. geschrieben...nur was da gesendet wird...damit komm ich noch nicht klar.. normalerweise müsste ich doch aus dem signal am CANH das Frame auslesen können und so vergleichen, was ich im prog gesendet hab und was da jetzt wirklich rauskommen tut...weil das scheint ja laut scope nicht daselbige zu sein..*leider* wäre ja zu schön gewesen, wenns gleich ohne probleme gefunzt hätt...lol
Da bei dir die Nachricht nie empfangen wird, wird diejenige, die als erstes gesendet wurde immer wieder gesendet. Daher ist es völlig ok, dass du immer dasselbe auf dem scope siehst. So einfach kannst du mit dem Scope die CAN Nachricht nicht ablesen, weil du dazu erst mal deine wirklich zu sendende nachricht ausrechnen müsstest. Dazu musst du auch die Stuff Bits beachten. Ganz zu schweigen von der CRC. Ich habe noch keine Quelle gefunden die sagt wie die CRC berechnet wird. Weiss das jemand? Bau erst mal den zweiten Knoten auf, dann erst kannst du sagen ob es geht oder nicht. Ein CAN Bus mit nur einem Teilnehmer gibt es nicht.
mit gleich bei den bildern meinte ich aber nicht, dass die message immer gleich bleibt, sondern das wenn ich das wort 0xff schicke am scope bild 1 kommt das wenn ich das wort 0x0 schicke am scope bild 2 kommt jedesmal neu gestartet und initialisiert, deswegen meinte ich das ich da nen unterschied sehen müsste wenn ich 0xff und 0x00 hintereinander schicken würde, dann wärs mir auch klar, aber da erst das eine wort (1), dann ein neues programming und dann wort 2 geschickt wird....kommt mir das spanisch vor
Achso ok. Aber ich würde trotzdem erst mal den zweiten Knoten bauen, bevor ich mir da weiter Gedanken drüber mache.
misst jetzt muss ich mir erst noch so nen can-treiber besorgen, sonst kann ich den 2ten knoten nicht anbinden.... naja ich mach mal und poste wieder wenns da ist.. merci und nen schönes wochenende
Bei zwei Knoten kannst du ausnahmsweise mal die CANRX und CANTX Leitungen gekreuzt verbinden. Aber wenn der zweite Transceiver da ist, vergisst du das wieder !
also ich hab jetzt versucht den zweiten knoten auf meinem dsPICDem 28 zu realisieren, scheitere aber da noch an der mangelnden Beschreibung zu dem Board. Die Register für den Can bleiben bei einem dsPIC30F4012 gleich wie beim 6014, aber die portinitialisierung, bzw. beim clock ist irgendwas anders...des funzt net....ich probier mal weiter. Das mit den überkreuzten Leitungen lass ich mal lieber, net das ich das aus dusselei dann so lass und mich wunder wenn nichts geht....lol
ui ui ui.... jetzt geht ein neuer bug um....habs mal in einem anderen thread gepostet... bitte mal durchlesen wenns geht... danke Thomas Beitrag "dsPIC30F6014 using 2 CAN-Module"
wozu hast du jetzt noch einen Thread aufgemacht? Es ist schwer genug hier einen wiederzufinden...
So langsam zweifel ich wieder daran ob ich das richtig gemacht habe... Wenn ich das Progi so, wie ich es geschrieben habe auf dem gleichen board, aber mit verschiedenen ds teste, kommt jedesmal ein anderes signal am ende raus.... kann es sein, dass ich beim init, bzw. bei den timings einen gravierenden fehler drinn habe, so dass ich wenn ich was senden will, immer das error-frame gesendet bekomme? hab mich mit der frage noch nicht auseinandergesezt. kennst du dich damit aus?
>du eh der einzige bist der hier zurückschreibt, bzw. bereit ist mit >bei meinem problem zu helfen Ok Tom, wenn Du auf meine Fragen nicht eingehen willst, wirst Du schon mit Willivonbienemaja's (großzügiger) Hilfe auskommen müssen. (Oder liest du deinen zweit-Thread nicht?) Gruss, Edson
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.