-- up und down sollen nur einen Takt lang aktiv sein,
28
-- deshalb werden sie hier wieder zurückgesetzt
29
ifup='1'then
30
up<='0';
31
endif;
32
33
ifdown='1'then
34
down<='0';
35
endif;
36
endif;
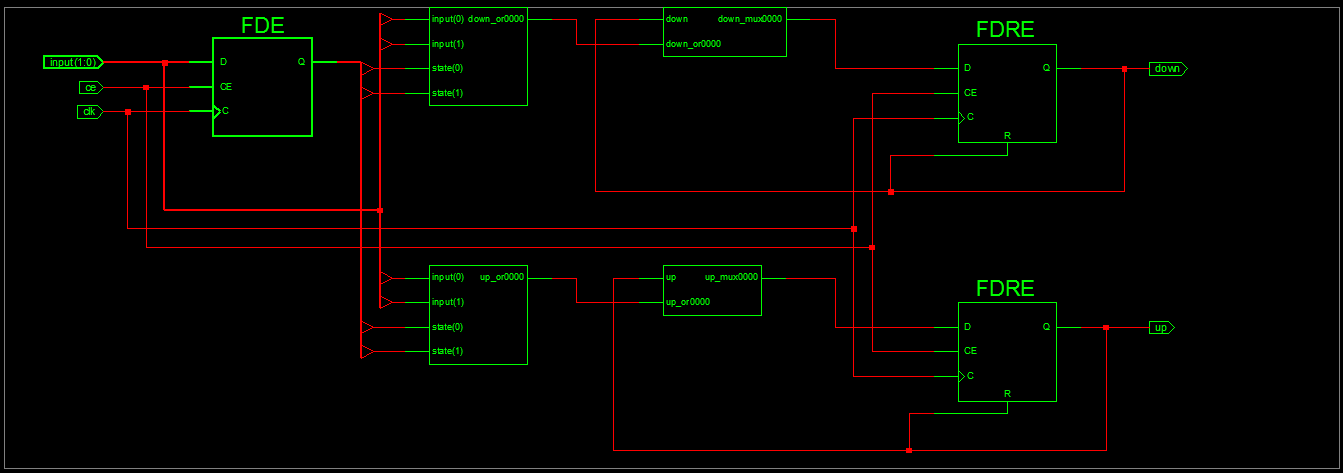
Daraus baut XST die angehängte Schaltung. Meine Fragen dazu:
- Ist es nötig "input" ganz am Anfang noch mal in ein Register zu lesen
(vermutlich ja), oder ist es ausreichend dass das Signal erst nach der
LUT registriert wird?
- Wozu sind die Multiplexer vor den Ausgangs-FF gut? Sollte es nicht
reichen, dass der Reset-Eingang der FF beschaltet ist?
Danke
Andreas
Hallo
Das erste Register muss schon am Anfang sein, denn die case soll ja die
Folge von input zu state erkennen.
Was XST genau aus deiner Schaltung macht ist mir auch nicht klar. Auf
jeden Fall ist das Zurücksetzten von up unnötig (und falsch). Es reicht
up unterhalb von rising_edge(clk) auf 0 zu setzten, denn state zu input
ist nur für eine Periode unterschiedlich (siehe case).
1
if rising_edge(clk) then
2
up <= '0';
3
down <= '0';
4
if ce = '1' then
5
state <= input;
6
7
case state & input is
8
when "0001" => up <= '1';
9
when "0010" => down <= '1';
10
11
when "0100" => down <= '1';
12
when "0111" => up <= '1';
13
14
when "1000" => up <= '1';
15
when "1011" => down <= '1';
16
17
when "1101" => down <= '1';
18
when "1110" => up <= '1';
19
20
when others => null; -- up <= '0' könnte auch hier stehen.
---- wrote:
> Das erste Register muss schon am Anfang sein, denn die case soll ja die> Folge von input zu state erkennen.
Das funktioniert schon so, die Frage ist nur ob es korrekt bzw. guter
Stil ist, ein externes asynchrones Signal kombinatorisch zu verarbeiten,
oder ob man es grundsätzlich vorher registrieren sollte.
> Was XST genau aus deiner Schaltung macht ist mir auch nicht klar. Auf> jeden Fall ist das Zurücksetzten von up unnötig (und falsch).
Ist unnötig umständlich, aber nicht falsch.
Jetzt fällt mir gerade der subtile Unterschied zwischen den beiden
Varianten auf: wenn CE für zwei Taktperioden high wäre könnte up/down
mit meiner Variante nicht zweimal hintereinander '1' werden. Bei der
Default-'0'-Variante legt die Synthese deshalb CE über Inverter an R,
bei der if-Variante den Ausgang des FF. Den Multiplexer kann ich mir
aber immer noch nicht erklären.
Gruß
Andreas
So meinst du das. Das Input Signal muss synchronisiert werden, da es in
zwei unabhängige Register gespeichert wird (state und up).
Das Falsch habe ich in Klammern geschrieben, da es in deiner Schaltung
nicht zu einem Fehler kommen kann. Mal Angenommen, up würde in der case
über mehrer Perioden auf eins gesetzt, weiter unten wird es aber auf 0
gesetzt, was dazu führen würde, dass es in der case wider auf 1 gesetzt
würde. Das up würde "Toggeln". Vermutung, die Synthese erkennt nicht,
dass up nur für eine Periode auf eins gesetzt wird, daher wird der
Multiplexer für das Feedback von up implementiert (es soll "Toggeln").
Gruss ----
IMHO liegt das Problem im Verständnis der Rangfolge (Prioritäten) in
einem FF
und im einem Prozeß:
(1) In einem (Xilinx)-FF ist reset (if R = '1' then Q <= '0')
höherwertige als set (if s = '1' then Q<= '1'),
und set höherwertig als Dataenable (if ce = '1' then Q <= D). Q ist der
FF Ausgang, R|S|CE die synchronen FF-Eingänge.
(2) In einem Process ist die letzte Zuweisung die höchstwertige, also
bei
1
q<='0';
2
q<='1';
3
q<='0';
wird die letzte Zuweisung q <= '0' ausgeführt (Synthetisiert).
(3) jede zuweisung in einem getakteten Prozess "wird zu einem FF".
Punkt (3) erklärt warum state zu einen FF mit Ausgang state wird.
Punkt (2) und (3) erklären die LUT vor dem Ausgangs-FF: Das Rücksetzten
ist hochprior (wird also unabhängig von CE ausgeführt) und damit in das
R Signal umgeformt, der CE-Zweig ist niedrig-prior wird also zum
datenenable mit vorgeschalteten Multiplexer.
Mit folgender Beschreibung sollte nur R und S des FF genutzt werden:
1, 2 und 3 sind mir klar, wie du auf deine Schlussfolgerung kommst aber
nicht.
R hat höhere Priorität als D/CE. Q liegt auf R. Sobald also Q aus irgend
einem Grund high wird (if up = '1') wird das FF resettet (up <= '0'),
egal was an D/CE passiert (die if-Abfrage kommt nach dem case). Passt
soweit zu meinem Code. Warum muss Q jetzt noch an den Multiplexer? Habe
ich da einen Denkfehler, oder XST?
Danke für das Beispiel, ich werde es morgen mal ausprobieren.
Den Artikel von Xilinx kenne ich, hat mir aber nicht weitergeholfen.
Was soll denn das? RS-FlipFlop? Wo leben wir denn?
Für die solide Auswertung eins Drehencoders braucht man 4 D-FlipFlops.
Zwei um die Eingangssignale zu sampeln und zwei zum Verzögern. Aus
diesen vier Signalen dekodiert man dann up/down.
Mfg
Falk
Falk Brunner wrote:
> Was soll denn das? RS-FlipFlop? Wo leben wir denn?> Für die solide Auswertung eins Drehencoders braucht man 4 D-FlipFlops.> Zwei um die Eingangssignale zu sampeln
...danke, das beantwortet endlich meine Frage #1.
> und zwei zum Verzögern. Aus> diesen vier Signalen dekodiert man dann up/down.
Ich möchte dass up/down jeweils nur für einen Takt aktiv ist, auch wenn
langsamer abgetastet wird, darum der Reset.
OK jetzt verstehe ich besser, dich stört nicht der Mux vor D, sondern
das der Muxer auch von Q abhängt.
Es liegt am XST, IMHO braucht der unbedingt ein elsif um den das
resetsignal nicht an D zu legen. Das ist IMHO die Aussage der
Application Note. "Wenn du einen reset willst, dann schreibe es
unbedingt so (mit elsif)". Man kann dasselbe verhalten in VHDL auch
anders beschreiben, aber dann "murkst er mit Multiplexer vor D herum.
Das ist das übliche problem
mit VHDL Synthese, jeder Hersteller hat seine eigenen festlegungen wie
der VHDL-code für ein "ordentliches" FF auszusehen hat. Da wird der VHDL
code nicht groß analysiert, sondern stur nach der Struktur (hier elsif)
gesucht
Und dann ist es nach meiner Erfahrung für den XST einfacher, wenn jedes
Q extra geschrieben wird. Folgend eine Beschreibung nach deinem Beispiel
1
process(clk)
2
begin
3
4
ifrising_edge(clk)then
5
ifce='1'then
6
state<=input;
7
endif;
8
--
9
ifup='1'then
10
up<='0';
11
elsifce='1'then
12
casestate&inputis
13
when"0001"=>up<='1';
14
when"0111"=>up<='1';
15
when"1000"=>up<='1';
16
when"1110"=>up<='1';
17
whenothers=>null;
18
endcase;
19
endif;
20
21
ifdown='1'then
22
down<='0';
23
elsifce='1'
24
casestate&inputis
25
when"0010"=>down<='1';
26
when"0100"=>down<='1';
27
when"1011"=>down<='1';
28
when"1101"=>down<='1';
29
whenothers=>null;
30
endcase;
31
endif;
32
33
endif;
34
endprocess;
Das ist wie gesagt eine codeumformung um die FF Beschaltung zu
"optimieren". Eine drehgeberumformung schreibt man aber wie falk
andeutet
anders. Wobei es schön wäre genau zu wissen welchen output der drehgeber
für up und down erzeugt. Im folgenden Artikel rate ich mal ein bißchen.
Also 2 bit Gray drehgeber. Im Up - Fall sieht die Folge so aus
..
00
01
11
10
..
Die zwei Bit kommen parallel asynchron in den FPGA. Wo kommt CE her?
wenn es vom geber kommt so ist dieses einzusynchronisieren. Un wie lang
ist es aktiv? und wie oft wechseln die beiden bits?
Wenn wir nur die beiden bits vom geber haben, und diese wechseln sehr
viel langsamer als unser takt, dann so (CE lasse ich weg, da nix
bekannt):
Danke für den Code. Ich wollte erst mal die einfache Version
implementieren, die nur zwei Zustände auswertet (C-Code von
http://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.29), weil manche
Drehgeber nur einen Zustandswechsel pro Schritt liefern.
Sorry dass ich das mit dem CE nicht genauer erklärt habe: das wird im
FPGA erzeugt und sorgt nur dafür dass die Eingänge nicht mit der vollen
Frequenz von xx MHz abgetastet werden. Das sollte die Auswertung
störsicherer machen als wenn man jeden noch so winzigen Impuls
auswertet.
@ Andreas Schwarz (andreas)
>Ich möchte dass up/down jeweils nur für einen Takt aktiv ist, auch wenn>langsamer abgetastet wird, darum der Reset.
Dazu braucht man keinen Reset, das ergibt sich automatisch!
Mfg
Falk
Wenn das Flipflop mit dem langsamen CE arbeitet ändert sich up/down nur
beim CE, es soll aber nach jedem Setzen nur einen Systemtakt lang aktiv
bleiben (damit man mit dem Ausgang z.B. direkt einen Zähler hochzählen
kann).
@ Andreas Schwarz (andreas)
>Wenn das Flipflop mit dem langsamen CE arbeitet ändert sich up/down nur>beim CE,
Ja.
> es soll aber nach jedem Setzen nur einen Systemtakt lang aktiv>bleiben (damit man mit dem Ausgang z.B. direkt einen Zähler hochzählen>kann).
Gut, auch das ist kein Problem. Nimm einfach zwei FlipFlops die mittels
CE die Daten abtasten. Der Dekoder läuft dann mit vollem Takt. Fertig.
Aber was soll das denn am Ende? So ein Dekoder besteht aus VIER
popeligen FLipFlops und minimaler Logic. Denn kann man problemlos auf
der vollen Geschwidigkeit laufen lassen, Stromverbrauchs ist da kein
Thema. Und das Reagieren auf "Störimpulse" wird mit dem langsameren Takt
auch nicht wirklich besser. Besser ist da eine Filterung per RC-Glied
oder per "Software" über digitale Mittelwertbildung.
MfG
Falk
Falk Brunner wrote:
>> es soll aber nach jedem Setzen nur einen Systemtakt lang aktiv>>bleiben (damit man mit dem Ausgang z.B. direkt einen Zähler hochzählen>>kann).>> Gut, auch das ist kein Problem. Nimm einfach zwei FlipFlops die mittels> CE die Daten abtasten. Der Dekoder läuft dann mit vollem Takt. Fertig.
Ja, wenn ich das Eingangssignal sowieso gleich registrieren muss ist das
naheliegend.
> Aber was soll das denn am Ende? So ein Dekoder besteht aus VIER> popeligen FLipFlops und minimaler Logic. Denn kann man problemlos auf> der vollen Geschwidigkeit laufen lassen, Stromverbrauchs ist da kein> Thema. Und das Reagieren auf "Störimpulse" wird mit dem langsameren Takt> auch nicht wirklich besser.
Je schneller abgetastet wird, desto wahrscheinlicher ist es dass sich
durch Preller/Störimpulse zufällig eine gültige Gray-Sequenz ergibt,
also ein Schritt falsch gezählt wird. Und da ein CE nicht viel kostet
(der 1 kHz-Takt wird sowieso für die Tastenentprellung erzeugt) gehe ich
lieber auf Nummer sicher.
@ Andreas Schwarz (andreas)
>Je schneller abgetastet wird, desto wahrscheinlicher ist es dass sich>durch Preller/Störimpulse zufällig eine gültige Gray-Sequenz ergibt,
Ja, aber
>also ein Schritt falsch gezählt wird. Und da ein CE nicht viel kostet>(der 1 kHz-Takt wird sowieso für die Tastenentprellung erzeugt) gehe ich>lieber auf Nummer sicher.
Du gibst dich einer Illusion hin. Denn auch wenn die Wahrscheinlichkeit
sinkt, ist sie immer noch relativ hoch, dass ein Abtastimpuls einen
Störimpuls einfängt. Wenn schon, dann RICHTIG (tm). Etwa so.
Falk Brunner wrote:
> @ Andreas Schwarz (andreas)>>>Je schneller abgetastet wird, desto wahrscheinlicher ist es dass sich>>durch Preller/Störimpulse zufällig eine gültige Gray-Sequenz ergibt,>> Ja, aber>>>also ein Schritt falsch gezählt wird. Und da ein CE nicht viel kostet>>(der 1 kHz-Takt wird sowieso für die Tastenentprellung erzeugt) gehe ich>>lieber auf Nummer sicher.>> Du gibst dich einer Illusion hin. Denn auch wenn die Wahrscheinlichkeit> sinkt,
Genau darum geht es doch, die Wahrscheinlichkeit zu reduzieren.
> ist sie immer noch relativ hoch, dass ein Abtastimpuls einen> Störimpuls einfängt.
Ein einziger Störimpuls den man zufällig bei der Abtastung erwischt
ändert nichts am Ergebnis. Nach 10 -> 11 -> 10 ist der Zählerstand immer
noch der selbe. Wenn ich dagegen mit 50 MHz abtaste werte ich GARANTIERT
jeden Fehler in der Schleiferbahn des Drehgebers aus. Und die
Wahrscheinlichkeit dass in 50 Millionen Abtastungen irgend eine Sequenz
enthalten ist die einen Zählfehler ergibt ist höher als bei 1000
Abtastungen.
> Wenn schon, dann RICHTIG (tm). Etwa so.
Es gibt kein "richtig" und "falsch", es ist alles ein Kompromiss
zwischen Aufwand und Nutzen. Ein CE an ein FlipFlop zu legen kostet
weder Zeit noch FPGA-Ressourcen.
@ Andreas Schwarz (andreas)
>Genau darum geht es doch, die Wahrscheinlichkeit zu reduzieren.
Das reicht aber nicht! Statt 10 Fehler pro Sekunde hast du dann immer
noch 1 Fehler pro Sekunde (als Beispiel).
>Ein einziger Störimpuls den man zufällig bei der Abtastung erwischt>ändert nichts am Ergebnis.
Ohh doch. Damit kannst du genauso Schiffbruch erleiden, wenn gleich die
Wahrscheinlichkeit geringer ist. Wasserdicht ist es denoch nicht, erst
mit RC-Filter oder digitlem Filter.
>Nach 10 -> 11 -> 10 ist der Zählerstand immer>noch der selbe.
Sicher, das ist er aber auch bei 50 MHz.
>Wenn ich dagegen mit 50 MHz abtaste werte ich GARANTIERT>jeden Fehler in der Schleiferbahn des Drehgebers aus. Und die
Nein, das ist schlicht falsch.
>Wahrscheinlichkeit dass in 50 Millionen Abtastungen irgend eine Sequenz>enthalten ist die einen Zählfehler ergibt ist höher als bei 1000>Abtastungen.
Ja, aber ist dennoch nicht wasserdicht.
>Es gibt kein "richtig" und "falsch",
Oh doch!
> es ist alles ein Kompromiss>zwischen Aufwand und Nutzen. Ein CE an ein FlipFlop zu legen kostet>weder Zeit noch FPGA-Ressourcen.
In einem FPGA! sind immer ein paar FlipFlops noch frei, um die digitalen
Filter einzubauen.
MfG
Falk
Falk Brunner wrote:
> @ Andreas Schwarz (andreas)>>>Genau darum geht es doch, die Wahrscheinlichkeit zu reduzieren.>> Das reicht aber nicht! Statt 10 Fehler pro Sekunde hast du dann immer> noch 1 Fehler pro Sekunde (als Beispiel).
Und wenn das reicht um die Spezifikation zu erfüllen? Wenn ich einen
Drehgeber zur Eingabe von Parametern verwende, dann darf es nicht
passieren dass man einen Schritt dreht und der Drehgeber um 5 Schritte
springt, aber ist es völlig egal wenn bei 100 Schritten mal nur 99
erkannt werden.
>>Ein einziger Störimpuls den man zufällig bei der Abtastung erwischt>>ändert nichts am Ergebnis.>> Ohh doch. Damit kannst du genauso Schiffbruch erleiden, wenn gleich die> Wahrscheinlichkeit geringer ist. Wasserdicht ist es denoch nicht, erst> mit RC-Filter oder digitlem Filter.
Es gibt keine wasserdichten Lösungen, nirgendwo und auch nicht bei der
Drehgeberauswertung. Auch dein Filter kann Fehler nicht völlig
ausschließen.
>>Nach 10 -> 11 -> 10 ist der Zählerstand immer>>noch der selbe.>> Sicher, das ist er aber auch bei 50 MHz.
Bei 10 -> 11 -> 01 -> 00 -> 10 aber nicht. Und das kann bei 50 MHz eher
passieren als bei 1 kHz.
>>Wenn ich dagegen mit 50 MHz abtaste werte ich GARANTIERT>>jeden Fehler in der Schleiferbahn des Drehgebers aus. Und die>> Nein, das ist schlicht falsch.
Wieso ist das falsch?
@ Andreas Schwarz (andreas)
>Und wenn das reicht um die Spezifikation zu erfüllen? Wenn ich einen
Dünnbrettbohrerei. Wenn ich wenig Aufwand ein Design wasserdicht machen
kann, dann tu ich das. Egal was die Spezifikation fordert.
>Drehgeber zur Eingabe von Parametern verwende, dann darf es nicht>passieren dass man einen Schritt dreht und der Drehgeber um 5 Schritte>springt, aber ist es völlig egal wenn bei 100 Schritten mal nur 99>erkannt werden.
OK.
>Es gibt keine wasserdichten Lösungen,
Aber sicher gibt es die. Und das nicht nur bei Uboot-bau ;-)
> nirgendwo und auch nicht bei der>Drehgeberauswertung. Auch dein Filter kann Fehler nicht völlig>ausschließen.
Aber er kann sie um Zehnerpotenzen verringern, mehr als eine niedrigere
Abtastrate.
>Bei 10 -> 11 -> 01 -> 00 -> 10 aber nicht. Und das kann bei 50 MHz eher>passieren als bei 1 kHz.
Ja EBEN. Du bist dir noch immer nicht über die Bedeutung der
Wahrscheinlichkeit im Klaren.
>>>Wenn ich dagegen mit 50 MHz abtaste werte ich GARANTIERT>>>jeden Fehler in der Schleiferbahn des Drehgebers aus. Und die>> Nein, das ist schlicht falsch.>Wieso ist das falsch?
Weil ich mit 50MHz Abtastung NICHT GARANTIERT JEDEN Fehler auswerte,
allerdings ist die Wahrscheinlichkeit höher.
MfG
Falk
Falk Brunner wrote:
> @ Andreas Schwarz (andreas)>>Es gibt keine wasserdichten Lösungen,>> Aber sicher gibt es die. Und das nicht nur bei Uboot-bau ;-)
Und trotzdem hat das U-Boot Lenzpumpen...
>> nirgendwo und auch nicht bei der>>Drehgeberauswertung. Auch dein Filter kann Fehler nicht völlig>>ausschließen.>> Aber er kann sie um Zehnerpotenzen verringern, mehr als eine niedrigere> Abtastrate.
Die "mehreren Zehnerpotenzen" klingen ziemlich aus der Luft gegriffen.
>>Bei 10 -> 11 -> 01 -> 00 -> 10 aber nicht. Und das kann bei 50 MHz eher>>passieren als bei 1 kHz.>> Ja EBEN. Du bist dir noch immer nicht über die Bedeutung der> Wahrscheinlichkeit im Klaren.
?
>>>>Wenn ich dagegen mit 50 MHz abtaste werte ich GARANTIERT>>>>jeden Fehler in der Schleiferbahn des Drehgebers aus. Und die>>>> Nein, das ist schlicht falsch.>>>Wieso ist das falsch?>> Weil ich mit 50MHz Abtastung NICHT GARANTIERT JEDEN Fehler auswerte,> allerdings ist die Wahrscheinlichkeit höher.
Das ist genauso "garantiert" wie deine Lösung "wasserdicht" ist.
Um das mal abzuschließen: in der Praxis scheint die Abtastung mit vollem
Takt ausreichend zu sein, ich konnte zumindest mit meinem mechanischen
Drehgeber keine Fehler feststellen. Aber mir war unwohl dabei, ein
Signal das sich nur sehr langsam ändern darf so auszuwerten als würde es
sich um einen Faktor 10^6 schneller ändern dürfen. Es ist einfach
unnötig, es verbessert nicht die Auswertung des Nutzsignals, aber wertet
potentiell mehr Störungen aus. Deshalb habe ich das CE eingebaut und
damit die selbe Lösung implementiert wie sie bei Mikrocontrollern weit
verbreitet und bewährt ist.
@ Andreas Schwarz (andreas)
>Und trotzdem hat das U-Boot Lenzpumpen...
Feiglinge ;-)
>potentiell mehr Störungen aus. Deshalb habe ich das CE eingebaut und>damit die selbe Lösung implementiert wie sie bei Mikrocontrollern weit>verbreitet und bewährt ist.
Womit alles im grünen Bereich ist. Bei nen Drehknopf isses ja nun nicht
wirklich superkritisch.
Amen!
MFG
Falk