Hiho Kann mir jemand verünftige Quellen für eine Slope Compensation nennen ? Vor allem wie man die Widerstädne dafür berechnet. Suche schon eine Ewigkeit ... aber die Application Notes der Hersteller ... ich verwende einen ucc3813-3 von TI geben nicht wirklich was her. Zumindest funktionieren die Vorschläge daraus bei mir leider nicht. Greez & THX Themistokles
Hi, Themistokles, (ah, die Verwendung großer Namen als Nick macht mir immer leichtes Bauchgrimmen) Du: "Kann mir jemand verünftige Quellen für eine Slope Compensation nennen..? Weiss keiner einen Rat ?" Die Problematik ist: 1. Google nennt 22.000 Hits. 2. Die wirst Du abgegrast haben, bevor Du uns um Rat fragst. Denn du bist sicher höflich, und unhöhflichen Personen antworte ich eher nicht, die lass ich eher zappeln als meine Tastatur abzunutzen. 3. Die Applikationsschriften leuchten mir ein. Sie scheinen mir vernünftig. Letztlich: Dein Wunsch nach "vernünftigen Quellen" erscheint mir angesichts dieser Sachlage unvernünftig zu sein. Ich kann die Applikationsschriften jedenfalls nicht toppen. Solltest Du eine konkrete Frage haben, weil Dir in der besten Applikationsschrift eine Aussage unverständlich scheint, dann nenne genau diese Schrift und Deine konkrete Frage. Ciao Wolfgang Horn
Angehängte Dateien:
-

slope.PNG
11 KB
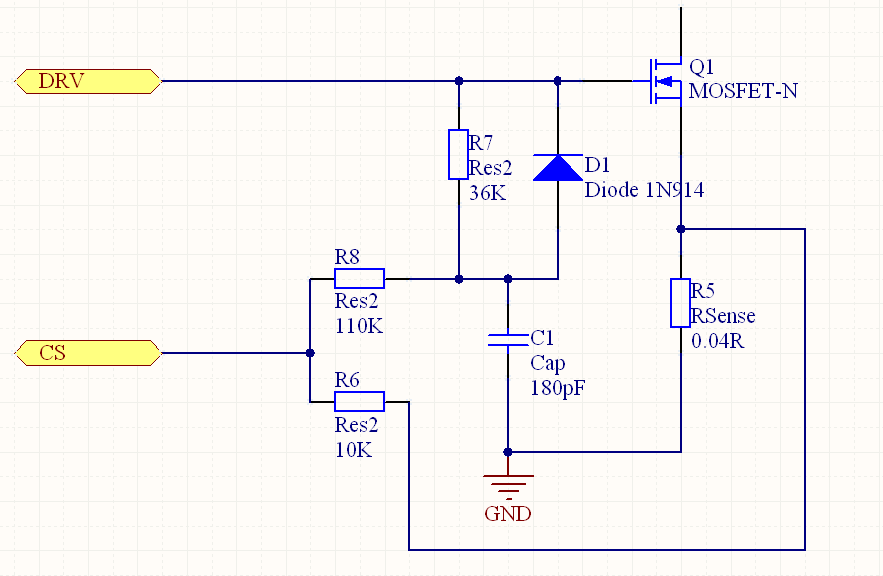
Hi merci für die Antwort. Da du mir ja gerade angeboten hast ich könne mich nach genauerem erkundigen. Also ich habe einen Boost Converter in CCM mit folgendem Problem: Bis 50 % Duty-Cycle (ungefähr) funktioniert alles besten ... jedoch danach. ich wandle oder besser will von 8 V auf 20 V bei 6 A Ausgangsstrom. Wandlerfrequenz liegt bei ungefähr 170 KHz ... hmm was gibt es noch .. das Controller IC ist ein UCC3813-3 von TI. Mein Sense Widerstand für den Strom habe ich auf 0.04 R berechnet ... So nun zur Slope Compensation: Mein Schaltplan schaut wie oben aus. Berechnet habe ich das ganz mit hilfe von http://www.onsemi.com/pub/Collateral/AND8029-D.PDF Jedoch funktioniert das ganz nicht :( Zumindest bleibt mein Wandler immer bei 15 V hängen. Vielleicht kann mir ja jetzt jemand helfen ;) Achja meine GS Spannung ist ungefähr 8 V Greez and THX Themistokles
Jojo das liebe ich blöd daher reden, klugscheissen ... aber dann nix dahinter Hab ich mich wohl doch schon schlau gemacht ... du bist nicht der einzige der Google bedienen kann ... es gibt auch ncoh mehr intelligentes Leben auf der Erde als dich ... warum wird man hier eigendlich immer dumm angepflaumt ..., wenn ich frage ob noch jemand andere Quellen hat dann kann man ja wohl stark annehmen dass ich viele Application Notes gelesen habe oder ? Wenn ich mal ehrlich bin ... bist der einzig unhöfliche hier wohl du ... Greez Themistokles
Wie hoch sind denn die ohmschen Widerstände Deiner Spule ? 120W sind ja mal 'ne Nummer...
Das Du nicht über 15Volt kommst, könnte mit Deinem Aufbau ansich zu tun haben. Der von Dir verwendete Controler besitzt bereits eine leading edge kompensation. Datenblatt Seite 1 • Internal Leading-Edge Blanking of the Current Sense Signal. Die Rampenspannung kannst Du am Pin4 "RC" hochohmig per Transistor(Emitterfolger) abgreifen und mit der SenseSpannung "vorsichtig" addieren. Das Datenblatt, welches ich gefunden habe (war gleich der erste Link) ist allerdings auch nicht besonders aufschlussreich, was die Dimensionierungshinweise betrifft. hier habe ich was gefunden: http://www.ti.com/litv/pdf/slua149 (ka. ob der Link so funktioniert) in der slua149 von TI auf Seite 9/10 findest Du etwas zum Thema SLOPE COMPENSATION Slope compensation can be added in all current mode control applications to cancel the peak to average current error. Slope compensation is neces- sary with applications with duty cycles exceeding 50%, but also improves performance in those below 50%. Primary current is sensed using resistor Rcs in series with the converter switch. The timing resistor can be broken up into two series resistors to bias up the NPN follower. This is needed to provide ample compliance for slope compensation at the beginning of a switching cycle, especially with continuous current converters. A NPN voltage follower drives the slope compensating programming resistor (Rsc) to provide a slope compensating current into Cf. Ich finde auf Anhieb meine Schaltung jetzt nicht, sonst könnte ich da mal nachsehen, wie bei mir die Werte aussahen. Ich mach aus 12V 40V bei 2.5Ampere (ok. bricht auf 36V zusammen, aber nicht weitersagen...:-)) Viel erfolg Axelr. Edith Beitrag "Re: Polizeisirene mit Mega8" nochmal edith Hier ist gar keine Slopekompensation drinn :((
Angehängte Dateien:
-

Boost_amp.png
39 KB
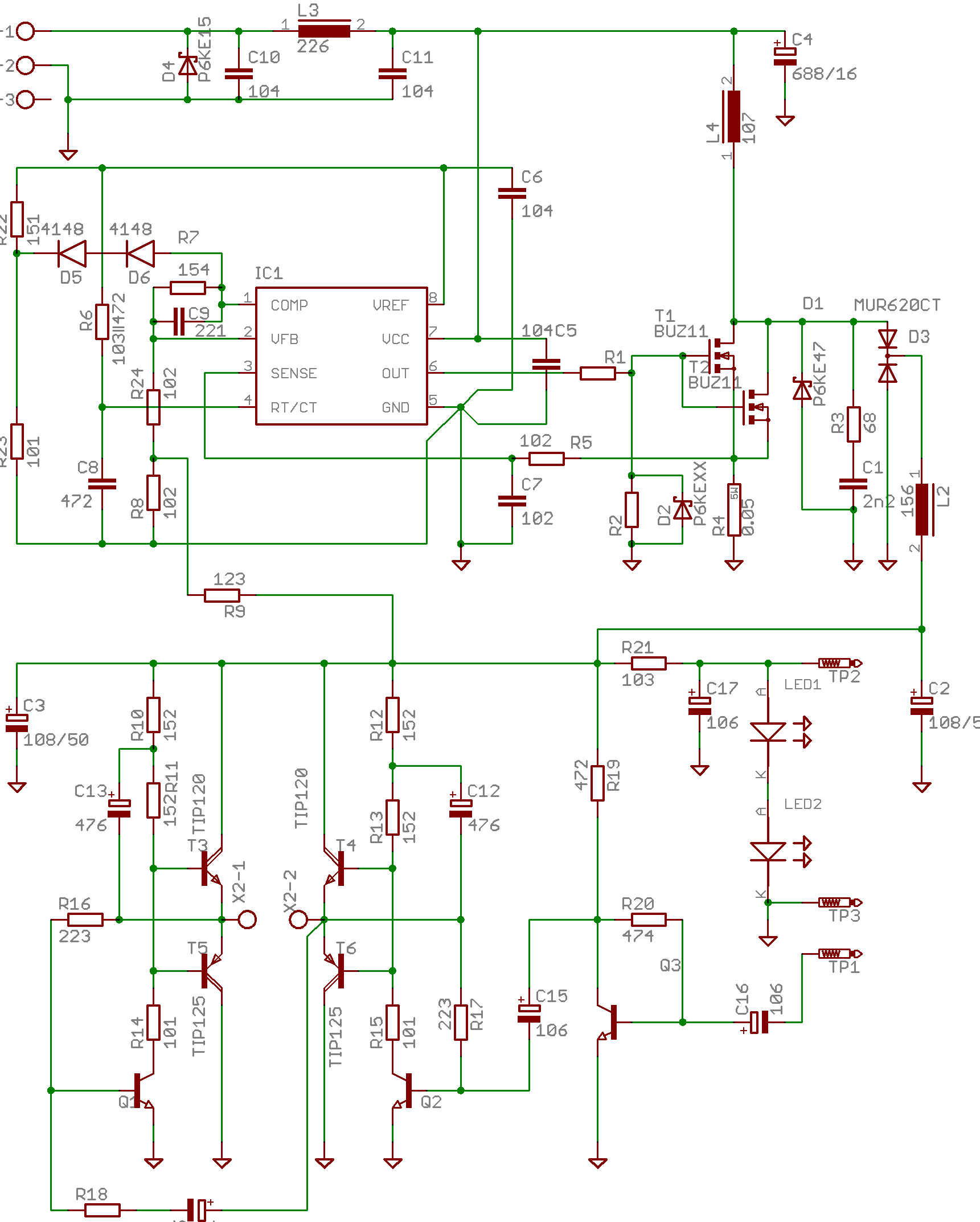
hier nochmal 'ne Schaltung mit Bauteilwerten. Verwendeter SMPS Controller: UC3843 http://focus.ti.com/docs/prod/folders/print/uc3843.html http://www.ti.com/lit/gpn/uc3843 http://focus.ti.com/docs/prod/folders/print/uc3843.html#applicationnotes
Vielen vielen Dank für deine Hilfe erstmal. Ich schaue mir das ganze morgen an und melde mich dann nochmals falls ich darf Verwendest du bei deiner Schaltung auch einen UCC3813 oder auch Vorgänger ? Ich bin da auf ein Problem gestossen das ich mir nicht so recht erklären kann: Ich habe als RT/CT Eingang ungefähr 170 kHz. Jedoch taktet mein Ausgang undgefähr mit 260 kHz. Wenn ich im Datenblatt nachschaue passen diese Werte eher zu der 1. Formel für UCC3813-5 statt für UCC3813-3
der Zweier kommt von mir und auch nur von einem Datenblatt vom Vorgänger ich bräuchte aber laut Datasheet
. Den zweier habe ich jetzt einfach mal als Fehler von TI angesehen. Ich hänge einfach mal den ganzen Schaltplan an, vielleicht wenn du Zeit hast weisst du ja noch was .. die Slope Compensation ist noch nicht eingebaut ... die ist wie der obere Schaltplan. Vielen Dank schonmal Themistokles P.S. Erwähne dich auch als Helfer bei meiner Bachelor Arbeit ;) ... wenn es dir recht ist grinz
Verdammt falsch gemacht die Formeln sollten natürlich
und [math] f = 1.5/(2*R*C) [math] heissen
Themistokles wrote: > Verdammt falsch gemacht die Formeln sollten natürlich > >
und
heissen nicht so schlimm, ist schon spät:)) den UC3843 hatte ich verbaut
Angehängte Dateien:
-

boost_converter.PNG
9,5 KB
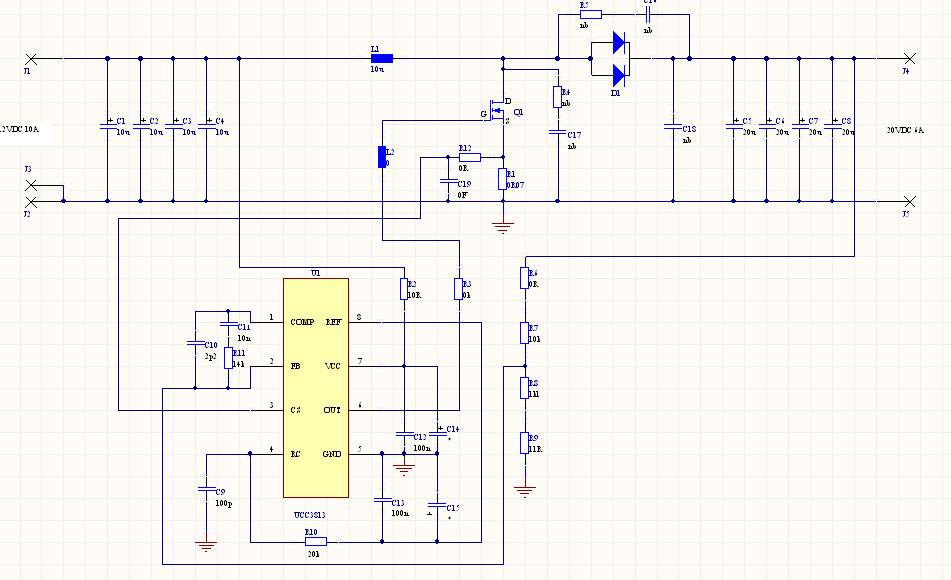
Verdammt es ist schon so spät, dass ich nur noch Fehler mache Anhang vergessen P.S. Was ich gesehen habe der Controller den du verwendet hast hat ja so ne Art Compensation schon intern ... zumindest soweit ich zu dieser Uhrezeit noch fähig bin was zu erkennen ... wenn ich den anderen nicht hinbekomme verwende ich doch deinen ... obwohl der Ehrgeiz schon schreit ;)
@Axel: sorry, aber warum hast Du eine Doppel-Diode als Gleichrichterdiode genommen (D3, zweite Diode an Masse)? Das ist komplett falsch und macht die ganze Boost-Topologie zunichte.
Hi wieso ist das falsch ? Wenn eine das ganze nicht schafft, dann muss ich halt zwei nehmen ... oder habe ich da einen Denkfehler ? Bis 10 V Eingang funktioniert das ganze auch perfekt nur unter 10 V da geht leider nix mehr :(
@fat.wobat @all Danke für dein Interesse. wie groß ist die Spannung am Pin1 von L2, wenn T1/T2 durchgesteuert sind und welchen Wert hat diese, wenn beide MOSFETs gesperrt sind? Was macht L2 überhaupt? Wird die Spannung am PIN1 von L2 zu einem Zeitpunkt x negativ gegenüber GND? Wenn ja, wann? Das sind die Gedanken, die ich mir gemacht hatte. Um den Stromfluss durch L2 aufrecht zu erhalten, Wenn beide Mosfets durchsteuern, habe ich die Doppeldiode mit einem Bein an Masse gelegt. Das ist falsch? Warum? Gruß auch an alle anderen, die mitlesen (und sich Gedanken machen) AxelR.
Hallo, mit RT/CT machst Du auch gleichzeitig eine maximale Dutycycle Begrenzung. Da liegt vermutlich auch Dein Problem. Der PWM Ausgang ist nur High während der RT/CT Ausgang von 0.75V auf 2.5Volt hochläuft. Danach kippt das FlipFlop auf low. Ich habe mal ein Matlab Skript geschrieben um die richtige R/C Kombi bei gewünschter maximaler Dutycycle und Frequenz zu ermitteln. Funktioniert bei meinem UCC38c43 gut. Bei bedarf kann ich es Dir mailen. Leading edge blank hat nichts mit Slopekomensation zutun. Es ist nur eine alternative zu dem RC Filter am Current Sense Eingang. Durch die Indukitivät des Shunts werden Spitzen verursacht, die damit ausgeblendet werden. Gruss Micha
Vielen Dank für die Hilfe ... gerne hätte ich das Matlab Skript ... nur eine Frage .. wie kommt man da drauf ? habe ich irgendwo was überlesen ? wo steht das ? Also ich glaube es dir ... aber ich finde es schwach dass das nicht vernünftig beschrieben wird von TI. bitte schick das Skript doch an fs at themistokles dot net Vielen Dank schonmal Themistokles
Hi Axel: na ja, die 2.Spule ist eigentlich gar nicht nötig, jetzt hast Du einen Buck-Boost, der wahrscheinlich auch nach unten regeln kann (Uaus<Uein), doch kostet das extra Geld (und gilt, wenn die 2.Spule wirklich eine Speicherspule und keine Stabkerndrossel ist)... Bzgl. hoher Ausgangsleistung: ich habe die Erfahrung gemacht, dass die PWM-Treiber eigentlich sehr schwache MOSFET-Treiber drinnen haben; bei den Leistungen, die Ihr vorhabt, ist sicher entweder ein wirklich starker PWM-Treiber nötig (etwas von MAXIM oder Linear oder National, MAX5095, LM3478, LTC3783...), der in Lage ist, ca. 3nF Gatekapazität innerhalb von 20-30ns zu schalten (und das ist echt hart, glaubt mir), oder eben ein externer MOSFET_Treiber. Versucht keine Push-Pull-Treiber-Stufe mit BJT-Transistoren, das funktioniert nur mit speziellen BJTs (Zetex, NXP), die man nicht so leicht findet. BTW, ich glaube, die LM3478 und LM5020 und LTC3783 haben interne Slope-Compensation, für LTC3783 bin ich mir eigentlich absolut sicher.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.