Hallo,
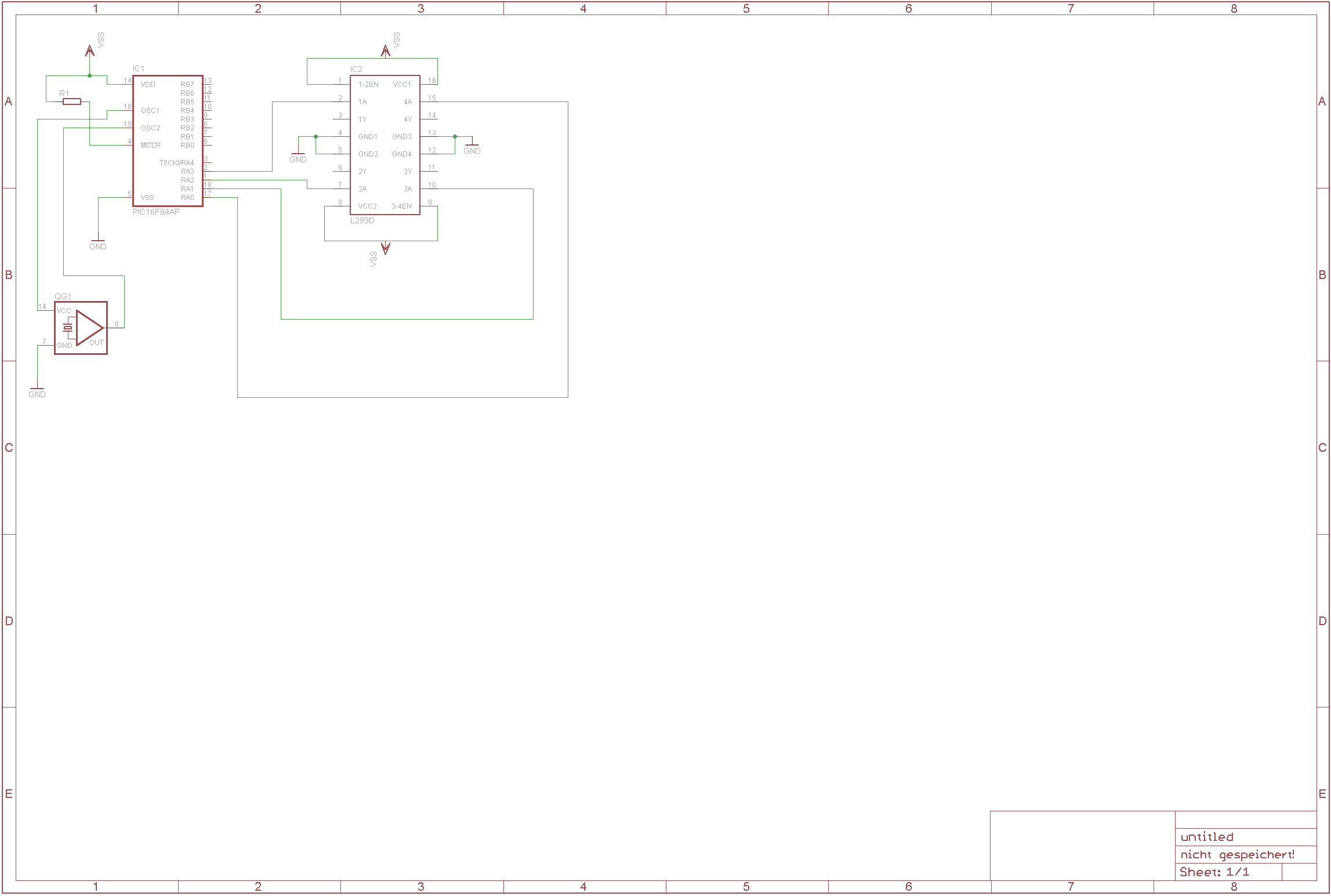
emoment versuche ich mit einem PIC16F84A und dem Treiber-IC L293D einen
bipolaren Schrittmotor anzutreiben. Der Motor bewegt sich beim
Einschalten auch um ein paar Schritte, doch dann erhitzt sich der PIC
sehr stark. PORTA habe ich mit dem Treiber-IC L293D verbunden wie im
Anhang zu sehen ist. Am Treiber-IC lege ich aber statt 12V 5V an.
Mein Quelltext sieht folgendermaßen aus:
1
//Schrittmotorsteuerung:
2
charschleifenschritt=1;//diese Variable zaehlt immer von 1 bis 4 und //sorgt dafuer das immer der richtige Ausgangszustand an die Statoren //weitergegeben wird
3
4
voidschrittefahren(signedcharschritte);//dreht den Schrittmotor um eine //bestimmte Anzahl an Schritten
5
6
#define statoren PORTA //an PORTA sind die Statoren ueber den IC verbunden
7
/*PORTA:
8
1.Bit: Stator 1 Anschluss 2
9
2.Bit: Stator 1 Anschluss 1
10
3.Bit: Stator 2 Anschluss 2
11
4.Bit: Stator 2 Anschluss 1
12
*/
13
14
voidmain(void){
15
//Initialisierung
16
TRISA=0;
17
PORTA=0;
18
schrittefahren(50);//vorwaertsdrehen um 50 Schritte
19
schrittefahren(-50);//rueckwaertsdrehen ''
20
}
21
voidschrittefahren(signedcharschritte){
22
intn;//Zaehlvariable fuer die bisherigen Schritte
23
if(schritte>0)//Vorwaerts
24
for(n=0;n<schritte;n++){//Schritte abfahren
25
delay_ms(250);
26
switch(schleifenschritt){//je nach Stellung des //Rotors wird ein anderer Zustand weitergegeben
27
case1:statoren=0b00000101;break;
28
case2:statoren=0b00001001;break;
29
case3:statoren=0b00001010;break;
30
case4:statoren=0b00000110;
31
schleifenschritt=0;
32
break;
33
}
34
schleifenschritt++;
35
}
36
else//Rueckwaerts
37
for(n=0;n<-schritte;n++){
38
delay_ms(250);
39
switch(schleifenschritt){
40
case1:statoren=0b00001001;break;
41
case2:statoren=0b00000101;break;
42
case3:statoren=0b00000110;break;
43
case4:statoren=0b00001010;
44
schleifenschritt=0;
45
break;
46
}
47
}
48
}
Hat jemand eine Idee warum sich der Mikrocontroller so stark erhitzt?
MfG Sebastian
Also bei starker Erwärmung des PIC würde man am ehesten einen
Kurzschluss vermuten.
Vielleicht schaust dir die 4 Ausgänge des PORTA einmal an, ob da
vielleicht irgendwo was falsch verbunden wurde.
Wenn da alles passt, klemm deine PORTA-Ausgänge mal ab und schau, ob der
µC ohne Anschluss des Treiberbausteins im Betrieb auch warm wird – dann
weißt zumindest, dass das Problem nicht am Treiberbaustein liegt.
Wird er auch in diesem Fall warm, dürfte ein Fehler in der
Grundbeschaltung des µC vorhanden sein, oder er ist im schlimmsten Falle
kaputt.
Ich glaube, dass der Rückwärtslauf nicht funktionieren wird, da dein
„schleifenschritt“-Zähler nicht inkrementiert wird im else-Zweig!
Hallo und vielen Dank für die Hilfe,
den Fehler in dem Skript habe ich repariert. Der PIC wird ohne Treiber
nicht heiß - mit Leuchtdioden habe ich schon die Funktionalität geprüft.
Wenn ich die LEDs anschließe wird der PIC ebenfalls nicht heiß (mit
1k-Widerständen). Wenn ich dann den Treiber-IC dazu schalte, blinken die
Leds nur mal kurz und hören auf zu leuchten.
Die Schaltung habe ich schon zweimal aufgebaut und bei beiden Malen gab
es das Problem.
Der Treiber-IC ist auch nicht defekt, den habe ich auch schon überprüft.
MfG Sebastian
Habe selbst neulich einen Schrittmotor angesteuert, allerdings über
MSP430, sollte aber keinen unterschied machen.
Dein Code ist etwas kompliziert: Verwende vieleicht eine Variable
Schritt, die je nach Richtung entweder aufwärts oder abwärts zählt,
und zwar von 0 bis 3:
schritt = (schritt + richtung) & 3; // richtung = -1,0,1
dann brauchst Du nur noch eine Case-Anweisung und der Code wird
erheblich einfacher zu lesen. Noch einfacher wirds, wenn Du
die Portausgabewerte zur Motoransteuerung in eine Tabelle (mit
vier Werten) ablegst => minimaler Code:
statoren = table[schritt];
Einen Anschlussfehler habe ich auch nicht gefunden: der L293 ist
richtig angeschlossen.
Gruss
Jörg
Die Ausgänge des PIC halten soweit ich weiß 20mA aus - aber das kann
eigentlich nicht überschritten werden (da Eingänge des Motortreibers
TTL-kompatibel).
Deine Versorgungsspannung für die beiden ICs ist ja 5 V - bekommst du
die von einem Festspannungsregler (7805)? Evtl. ziehst du beim
Anschließen des Motortreibers und den zwei Schrittmotoren zuviel Strom,
wodurch die Spannung einbricht und der µC nicht mehr richtig arbeiten
kann.
Hallo und vielen Dank für die Ratschläge,
@ holger: Ja ich betreibe das ohne Abblockkondensatoren.
Wo und was für Abblockkondensatoren sollte ich den einbauen?
@ Jörg: Vielen Dank für die Ratschläge - Ich änder gleich mein Skript.
Mal eine Frage, hast du bei deiner Schaltung zwischen dem
Treiber-IC-Anschlüssen für den Mikrokontroller und der Masse Widerstände
angeschlossen?
@ Daniel R.: An der Spannungsversorgung liegt es nicht - ich verwende
ein hochwertiges geregeltes Labornetzteil, was mich bis jetzt noch nie
enttäuscht hat. Es ist übrigens nur ein Schrittmotor angeschlossen.
Ich habe noch eine allgemeine Frage: Könnte es sein, dass der Mic. an
den Ausgängen Dioden hat, die entweder 5V oder gar nix durchlassen? Dann
gäbe es dort keine Masse und ich müsste zwischen Ausgang und Masse einen
Widerstand packen? Richtig oder? Der Mic. würde sich deswegen erhitzen,
weil ein hoher Strom an den Dioden ist!????
MfG Sebastian
@Sebastian,
ich habe die Ausgänge direkt mit dem Treiber verbunden, frag aber lieber
eine E-Techniker, wie Du die PIC-Ausgänge mit den TTL-Eingängen des
Treibers verbinden solltest. Meine Testschaltung läuft aber auch nur mit
5 Volt, es ging mir nur um die Funktionalität/Ansteuerung per C-Code.
Gruss,
Jörg
PIC-Ausgänge an TTL-Eingänge geht eigentlich problemlos. Schon eher
könnten die offenen Eingänge 1Y bis 4Y am L293D Probleme bereiten ...
Als Abblockkondensator sollte ein 100nF (Keramik) an VSS und GND des PIC
ausreichen.
Nice weekend,
Zardoz
Hallo - danke für die Informationen,
zunächst erstmal habe ich den Code überarbeitet- statt PORTA nehme ich
PORTB:
1
//Schrittmotorsteuerung:
2
//Def.
3
#define statoren PORTB
4
//Initial.
5
charstatorenstellung=0;
6
charstatoren_stellung[4];
7
voidschrittefahren(signedcharschritte);
8
9
voidmain(void){
10
TRISB=0;
11
PORTB=0;
12
statoren_stellung[0]=0b00000101;
13
statoren_stellung[1]=0b00001001;
14
statoren_stellung[2]=0b00001010;
15
statoren_stellung[3]=0b00000110;
16
17
schrittefahren(50);
18
schrittefahren(-50);
19
}
20
21
voidschrittefahren(signedcharschritte){
22
intrichtung=0;//Richtung des Schrittmotors
23
24
if(schritte==0){
25
return;//keine Schritte fahren
26
}elseif(schritte>0){//vorwaertsfahren
27
richtung=1;
28
}else{//rueckwaertsfahren
29
richtung=-1;
30
schritte=~schritte;
31
}
32
while(schritte>0){
33
statoren=statoren_stellung[statorenstellung];
34
statorenstellung=(statorenstellung+richtung)&3;
35
schritte--;
36
delay_ms(250);
37
}
38
39
}
Mein Logiktest blinkt in richtigen Abständen ohne Anschluss an den
Treiber (schon mal ein gutes Zeichen) - aber ich bin mir nicht sicher ob
das invertieren mit dem Sigmazeichen so klappt (schritte = ~schritte;) ?
Beim Anschluss an den Treiber-IC kamen aber nur für einige Millisekunden
5V an. Es scheint als würde der Treiber-IC die Spannung von 5V sofort
auf Low ziehen?
Wie ist so etwas mögl.?
MfG Sebastian
Hallo,
Du verwendest einen Dopplbrückentreiber. Bei diesen sind 2 Transistoren
in Reihe geschaltet zwischen Ub und GND. Wenn Du jetzt deine Schaltung
einschaltest besteht die Möglichkeit (je nach verwendetem IC) dass beide
Transistoren durchgeschaltet sind und deine Spannung zusammenbricht
(Kurschluss über die Transistoren). Was wäre eine Lösung? Nun, den
Baustein erst nach dem "Hochfahren" des PIC mit der Enable-Leitung
aktivieren (die momentan an Ub hängt). Oder die Eingänge auf definierte
Pegel legen. Vielleicht helfen am Ausgang des PIC Pull-Down oder
PUll-Ups. Das sind aber bisher nur Vermutungen die erst noch geprüft
werden müssen. Also ran ans Messgerät ;-).
Olaf
@Sebastian,
Der Operator "~" invertiert bitweise, bei 16-Bit-Integer wird aus
50 glaube ich 32718 (oder etwas in der Grösse), bei 32-Bit-Integer
sowas wie 2.147.483.598
D.h. bei 16 bit stört der Fehler bzgl. Laufzeit ein wenig, im
32-Bit-Fall erreichts fast schon das Ende der Motorlebenszeit.
Schreib vieleicht noch
char statoren_stellung[4] = {0b00000101, ... };
und lass die Initialisierung derstatoren_stellung-Werte in <main> weg.
Gruss
Jörg
Vielen Dank für die Ratschläge,
@Olaf: Jo mein Messgerät steht nicht mehr still ;-)
@Jörg:Schade, dass das Sigmazeichen nicht so funktioniert wie ich das
gerne hätte: Ich wollte eig. folgendes: schritte = (-1)*schritte; - Ich
dachte das bekäme ich durch das invertieren. Nur mit RISC-Proz. kann man
nur über bestimmte Algorithmen multiplizieren, die wieder Speicherplatz
kosten. Gibt es dafür eine andere Mögl. oder muss ich "richtung" als
Parameter übergeben lassen?
MfG Sebastian
@Sebastian,
das was ich da mit Invertierung und 32718 als 16-Bit-Ergebnis
geschrieben habe, war natürlich Quatsch (sorry, ist kurzfristig
in einer Werbepause entstanden), bezog sich auf das Invertieren
von 50 statt von -50!!!!!
Beim Negieren hast Du ja das 2er-Komplement, und das erreichst
Du durch
schritte = -schritte;
statt
schritte = (-1)*schritte;
Multiplizieren musst Du also nicht.
Gruss
Jörg
Hallo,
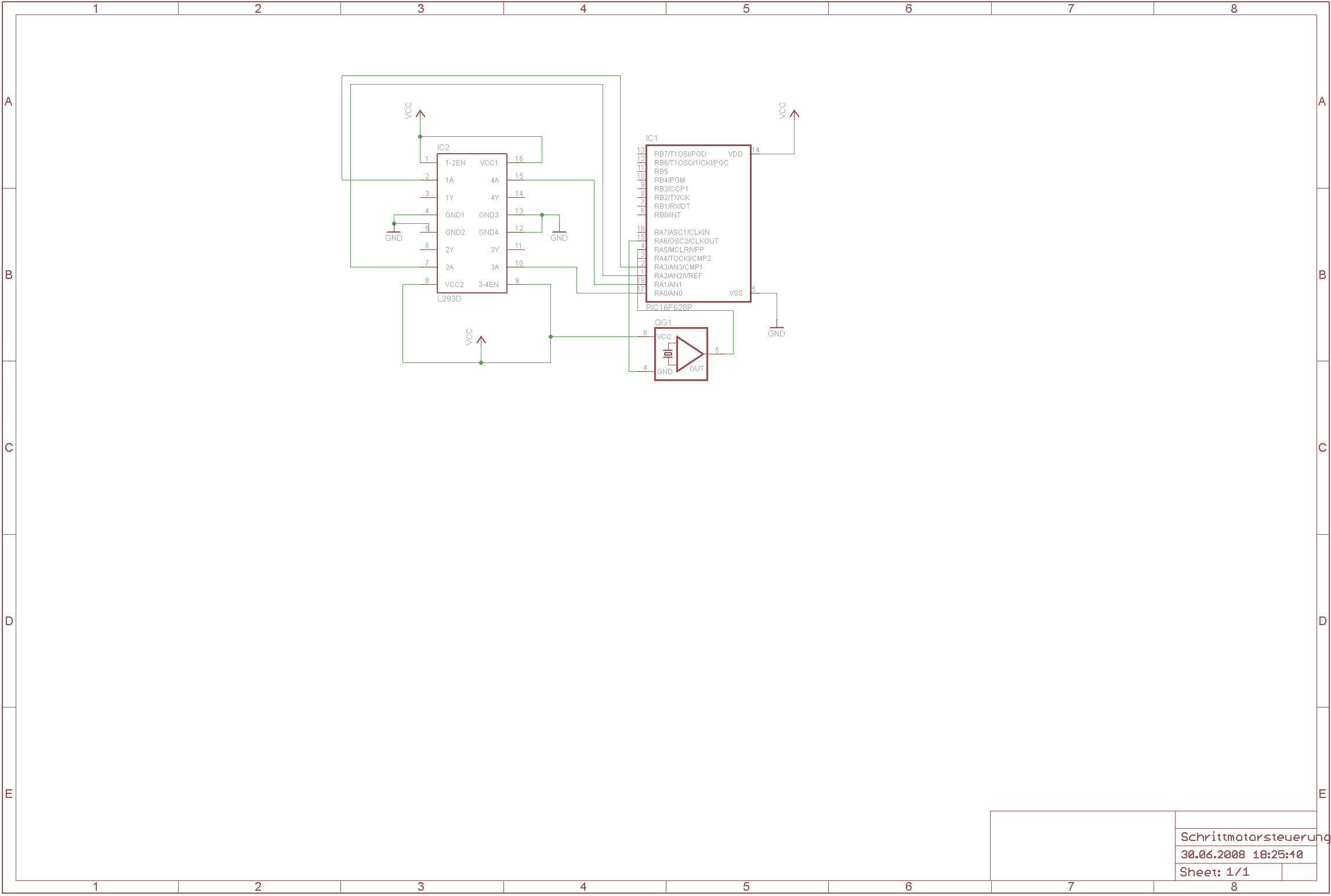
es funktioniert!!! Es läuft mit einem anderen Prozessor (PIC16F628).
Mein 2. PIC16F84A hat wohl Herz-Rhytmusstörungen und kann bald wohl
wegen Altersschwäche begraben werden. ;-)
Ich hab hier noch mal mein Skript aufgelistet: