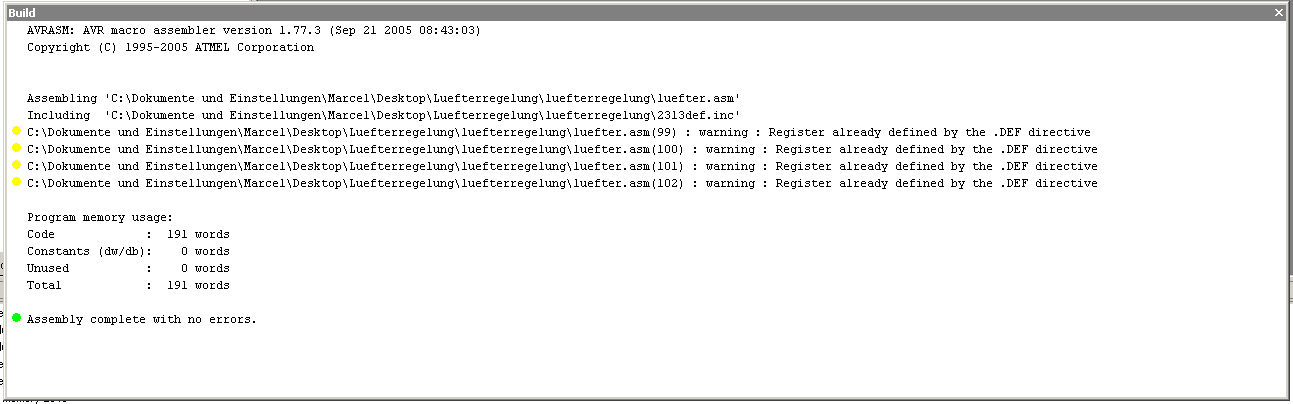
Hallo, Ich habe hier ein älteres Projekt von:"http://www.uwe-freese.de/"; für eine Lüfterrregelung. Beim compilieren bekomme ich 4 Warnungen (siehe Bild). Kann ich die vernachlässigen? ; ##################################################################### ; ### Lüfterregelung 1.0 07/2004 (c) Uwe Freese ### ; ### http://www.uwe-freese.de mail@uwe-freese.de ### ; ### ### ; ### You can use this program freely, but please always include ### ; ### this copyright information when you share it. ### ; ### ### ; ### Diese Software kann frei verwendet werden, aber bitte immer ### ; ### diesen Copyright-Hinweis hinzufügen, wenn es weitergegeben ### ; ### wird! ### ; ##################################################################### .CSEG .ORG 0x00 .include "2313def.inc" ; ------------------ Diese Werte dürfen geändert werden ------------------ .equ MotorThrMIN = 40 ; min. Lüfterleistung x/255 (im Bereich 1..254) ; Muss kleiner als MotorThrMAX sein. So einstellen, dass der Motor bei dem Wert nicht stehenbleibt. .equ MotorThrMAX = 254 ; max. Lüfterleistung x/255 (im Bereich 1..254) .equ MotorThrSTART = 150 ; Lüfterleistung am Anfang x/255 .equ anatest_every = 60 ; alle x Schleifendurchgänge nur Temperatur messen ; ein Schleifendurchgang dauert ca. 43,5 ms ; bei Wert von 150 also Messung alle 6,5 s ; damit dauert einmal komplett herunter (Maximal- zu Minimaldrehzahl) ca. 12,6 Min. ; damit dauert einmal komplett herauf (Minimal- zu Maximaldrehzahl) ca. 5 Min. ; Der Wert ist abhängig vom verwendeten Lüfter. Bei einem Lüfter mit hoher Luftleistung z.B. 200 nehmen. ; bei einem Lüfter mit niedriger Luftleistung (Papst 4412F/GL) niedrigen Wert nehmen (80). .equ STARTUPDELAY = 60 ; Wie lange am Anfang Motor komplett einschalten? (x * 50 ms) ; ------------------ Für die Regelung irrelevante Werte (dürfen geändert werden) ------------------ .equ LEDBLINK_LOOPVAL = 7 ; in welchem Rythmus blinken (Taktverhältnis LEDBLINK_LOOPVAL/LEDBLINK_LOOPVALMAX) .equ LEDBLINK_LOOPVALMAX = 14 ; in welchem Rythmus blinken (Taktverhältnis LEDBLINK_LOOPVAL/LEDBLINK_LOOPVALMAX) .equ LEDBLINKQUICK_LOOPVAL = 2 ; in welchem Rythmus blinken (Taktverhältnis LEDBLINKQUICK_LOOPVAL/LEDBLINKQUICK_LOOPVALMAX) .equ LEDBLINKQUICK_LOOPVALMAX = 4 ; in welchem Rythmus blinken (Taktverhältnis LEDBLINKQUICK_LOOPVAL/LEDBLINKQUICK_LOOPVALMAX) ; ------------------ Folgende Werte möglichst nicht ändern ------------------ ;Port B pins .equ AIN0 = 0 .equ AIN1 = 1 .equ MOTOR = 5 ; Bargraph: ; 0-6 ist PortD Pin 0-6 ; 7-8 ist PortB Pin 2-3 ;Belegung PortD ; Pin 0 = LED 0 (Bargraph) ; Pin 1 = LED 1 (Bargraph) ; Pin 2 = LED 2 (Bargraph) ; Pin 3 = LED 3 (Bargraph) ; Pin 4 = LED 4 (Bargraph) ; Pin 5 = LED 5 (Bargraph) ; Pin 6 = LED 6 (Bargraph) ;Belegung PortB ; Pin 0 = AIN0 ; Pin 1 = AIN1 ; Pin 2 = LED 7 (Bargraph) ; Pin 3 = LED 8 (Bargraph) ; Pin 4 = LED 9 (Bargraph) (ROT) ; Pin 5 = Motor-Ausgang ; Pin 6 = Temperatur-Test Pin 0 (Standard = aus) ; Pin 7 = Temperatur-Test Pin 1 (Standard = ein) ; Temperatur-Test-Pins ; normale Einstellung ist: Pin 0 ein, Pin 1 aus ; durch Schalten von beiden Pins auf aus, kann überprüft werden, ob die Temperatur gerade "stark" fällt ; durch Schalten von beiden Pins auf ein, kann überprüft werden, ob die Temperatur gerade "stark" steigt ; Werte, ab denen die LEDs an sind .equ LED0_on_if_higher = 23 .equ LED1_on_if_higher = 46 .equ LED2_on_if_higher = 70 .equ LED3_on_if_higher = 93 .equ LED4_on_if_higher = 116 .equ LED5_on_if_higher = 139 .equ LED6_on_if_higher = 162 .equ LED7_on_if_higher = 185 .equ LED8_on_if_higher = 209 .equ LED9_on_if_higher = 232 .def temp = r16 ; allgemein verwendbare temp-Variable .def temp2 = r17 ; Level zur Anzeige von Geschwindigkeit für 10 LEDs (0..10) .def mydelay = r18 .def startuploopcounter = r19 .def motorloopcounter = r20 ; Motor-Schleifenzähler .def MotorThr = r21 ; momentaner Wert, bis zu dem Motor ein ist .def anatest_loop = r22 .def history = r23 ; von den letzten 8 Messungen abspeichern, ob current_motor_thr ; erhöht (1) oder erniedrigt (0) wurde .def history_quick = r24 ; von den letzten 8 Messungen abspeichern, ob current_motor_thr ; schnell erhöht/erniedrigt (1) oder nur normal erhöht/erniedrigt wurde (0) .def LED_loop = r25 .def LED0_on = r26 .def LED9_on = r27 .def ledblink_loopval_current = r28 ; für tatsächliches Blinkverhalten verwendet (abhängig von Temp-Differenz stark/schwach) .def ledblink_loopvalmax_current = r29 ; für tatsächliches Blinkverhalten verwendet (abhängig von Temp-Differenz stark/schwach) ; --------- Initialisierung --------- ; Stack initialisieren ldi temp, 0xB5; RAMEND == 0xDF out SPL, temp ; Watchdog einschalten ldi temp, 0b00001111 out WDTCR, temp ; Rest ldi LED0_on,0 ldi LED9_on,0 ldi LED_loop, LEDBLINK_LOOPVALMAX ldi anatest_loop,1 ; gleich nach Start die erste Messung machen ldi temp,0b11111100 ; initialise port B as I/O, 6 OUT 2 IN out DDRB,temp ldi temp,0b00101111 ; key columns all low and out PORTB,temp ; active pull ups on rows enabled ldi temp,0b01111111 ; initialise port D as I/O, 7 OUT out DDRD,temp rcall RESET_HIGH_TEMP_DIFF_PINS ; damit der Motor anläuft 5 Sek. einschalten ldi temp,0b01111111 ; alle LEDs an PORT D out PORTD,temp sbi PORTB,2 ; LED an Port B sbi PORTB,3 ; LED an Port B sbi PORTB,4 ; LED an Port B ldi MotorThr,MotorThrMAX ; volle Drehzahl rcall STARTUPLOOP ; 3 sec Motor komplett einschalten ; history mit "normal höher" oder "normal niedriger" füllen, damit auch gleich PRO_ADJUST anspringen kann, wenn es stark unterschiedlich ist. ldi history_quick,0b00000000; clear history sbic ACSR,ACO ; skip next instruction if output is low rjmp INIT_HOEHER ldi history,0b00000000 ; clear history rjmp MOTOR_SLOWDOWN INIT_HOEHER: ldi history,0b11111111 ; clear history ; Motor langsam von Maximalwert auf Default stellen MOTOR_SLOWDOWN: subi MotorThr,3 ; mit 3-facher Geschwindigkeit herunterregeln (ergibt etwa 2-3 Sek für's Herunterregeln) rcall BARGRAPH rcall MOTORLOOP cpi MotorThr,MotorThrSTART ; schon auf Defaultwert? brlo MAINLOOP ; dann nicht verringern rjmp MOTOR_SLOWDOWN MAINLOOP: ; --------- Spannung vergleichen --------- rcall MOTORLOOP rcall LEDBLINK ; nur von Zeit zu Zeit einen anatest machen dec anatest_loop cpi anatest_loop,0 brne MAINLOOP ldi anatest_loop,anatest_every lsl history ; Platz in History schaffen (Bit 0 auf 0) lsl history_quick ; Platz in History schaffen (Bit 0 auf 0) ldi ledblink_loopval_current, LEDBLINK_LOOPVAL ; Blinkwerte auf Standard ldi ledblink_loopvalmax_current, LEDBLINK_LOOPVALMAX ; Blinkwerte auf Standard sbic ACSR,ACO ; skip next instruction if output is low rjmp HOEHER ; Ist-Temperatur stark höher -> MotorThr um 5 erhöhen ; Ist-Temperatur normal höher -> MotorThr um 1 erhöhen ; Ist-Temperatur stark niedriger -> MotorThr um 2 verringern ; Ist-Temperatur normal niedriger -> MotorThr um 1 verringern NIEDRIGER: ; Auswertung, ob "stark fallend" ; Wenn Temperatur fallend, dann hat Temp.fühler höheren Widerstand. Spannung an AIN2 ist dann höher. ; Jetzt also Spannung an AIN1 auch höher machen, um zu sehen, ob sie dann an AIN2 immer noch höher ist. ; Spannung an AIN1 wird erhöht, in dem Temp 0 auch EINgeschaltet wird. sbi PORTB, 6 rcall MY_DELAY ; ca 1 ms warten, damit die Spannung sich anpasst, falls Kapazitäten rcall MY_DELAY rcall MY_DELAY rcall MY_DELAY rcall MY_DELAY sbic ACSR,ACO ; skip next instruction if output is high rjmp NIEDRIGER_NORMAL NIEDRIGER_STARK: sbr history_quick,1 ; setze Bit 0 auf 1 in history_quick ldi ledblink_loopval_current, LEDBLINKQUICK_LOOPVAL ; Blinkwerte auf schnell-blinkend ldi ledblink_loopvalmax_current, LEDBLINKQUICK_LOOPVALMAX ; Blinkwerte auf schnell-blinkend rcall DEC_MOTORTHR NIEDRIGER_NORMAL: rcall DEC_MOTORTHR rjmp HISTORY ; und springe dann zu HISTORY HOEHER: sbr history,1 ; setze Bit 0 auf 1 in history ; Auswertung, ob "stark steigend" ; Wenn Temperatur steigend, dann hat Temp.fühler niedrigeren Widerstand. Spannung an AIN2 ist dann niedriger. ; Jetzt also Spannung an AIN1 auch niedriger machen, um zu sehen, ob sie an AIN2 dann immer noch niedriger ist. ; Spannung an AIN1 wird erniedrigt, in dem Temp 1 auch AUSgeschaltet wird. cbi PORTB, 7 rcall MY_DELAY ; ca 1 ms warten, damit die Spannung sich anpasst, falls Kapazitäten rcall MY_DELAY rcall MY_DELAY rcall MY_DELAY rcall MY_DELAY sbis ACSR,ACO ; skip next instruction if output is low rjmp HOEHER_NORMAL HOEHER_STARK: sbr history_quick,1 ; setze Bit 0 auf 1 in history_quick ldi ledblink_loopval_current, LEDBLINKQUICK_LOOPVAL ; Blinkwerte auf schnell-blinkend ldi ledblink_loopvalmax_current, LEDBLINKQUICK_LOOPVALMAX ; Blinkwerte auf schnell-blinkend rcall INC_MOTORTHR rcall INC_MOTORTHR rcall INC_MOTORTHR rcall INC_MOTORTHR HOEHER_NORMAL: rcall INC_MOTORTHR ; --------- History-Auswertung --------- HISTORY: ; zunächst HighTempDiff-Pins wieder auf Normalzustand rcall RESET_HIGH_TEMP_DIFF_PINS ldi LED0_on,0 ; LED 0 Blinkmodus AUS (default) ldi LED9_on,0 ; LED 10 Blinkmodus AUS (default) mov temp,history andi temp,0b01111111 ; letzte 7 Bits betrachten cpi temp,0b01111111 ; wenn alle 6 Bits EIN breq LEVEL_HOCH rjmp LEVEL_WEITER LEVEL_HOCH: ldi LED9_on,1 ; LED 10 EIN rjmp HISTORY_END LEVEL_WEITER: mov temp,history andi temp,0b01111111 ; letzte 7 Bits betrachten cpi temp,0b00000000 ; wenn alle 6 Bits AUS breq LEVEL_RUNTER rjmp HISTORY_END LEVEL_RUNTER: ldi LED0_on,1 ; LED 0 EIN HISTORY_END: rcall BARGRAPH rjmp MAINLOOP ; ---------- ENDE ----------- ; --------- Bargraph-Anzeige --------- BARGRAPH: ; Anzahl LEDs = (MotorThr - MotorThrMIN) / 20 ; dadurch max = (254 - 25) / 24 = 9,6 ; dadurch min = (25 - 25) / 24 = 0 BARGRAPH_LEDCHECK0: ; Test, ob LED0 gerade blinkt (dann nichts ändern) cpi LED0_on,0 brne BARGRAPH_LEDCHECK1 ; normaler Check (wie bei anderen LEDs) cbi PORTD,0 cpi MotorThr,LED0_on_if_higher brlo BARGRAPH_LEDCHECK1 sbi PORTD,0 BARGRAPH_LEDCHECK1: cbi PORTD,1 cpi MotorThr,LED1_on_if_higher brlo BARGRAPH_LEDCHECK2 sbi PORTD,1 BARGRAPH_LEDCHECK2: cbi PORTD,2 cpi MotorThr,LED2_on_if_higher brlo BARGRAPH_LEDCHECK3 sbi PORTD,2 BARGRAPH_LEDCHECK3: cbi PORTD,3 cpi MotorThr,LED3_on_if_higher brlo BARGRAPH_LEDCHECK4 sbi PORTD,3 BARGRAPH_LEDCHECK4: cbi PORTD,4 cpi MotorThr,LED4_on_if_higher brlo BARGRAPH_LEDCHECK5 sbi PORTD,4 BARGRAPH_LEDCHECK5: cbi PORTD,5 cpi MotorThr,LED5_on_if_higher brlo BARGRAPH_LEDCHECK6 sbi PORTD,5 BARGRAPH_LEDCHECK6: cbi PORTD,6 cpi MotorThr,LED6_on_if_higher brlo BARGRAPH_LEDCHECK7 sbi PORTD,6 BARGRAPH_LEDCHECK7: cbi PORTB,2 cpi MotorThr,LED7_on_if_higher brlo BARGRAPH_LEDCHECK8 sbi PORTB,2 BARGRAPH_LEDCHECK8: cbi PORTB,3 cpi MotorThr,LED8_on_if_higher brlo BARGRAPH_LEDCHECK9 sbi PORTB,3 BARGRAPH_LEDCHECK9: ; Test, ob LED9 gerade blinkt (dann nichts ändern) cpi LED9_on,0 brne BARGRAPH_LEDCHECK10 ; normaler Check (wie bei anderen LEDs) cbi PORTB,4 cpi MotorThr,LED9_on_if_higher brlo BARGRAPH_LEDCHECK10 sbi PORTB,4 BARGRAPH_LEDCHECK10: ret ; MotorThr erhöhen INC_MOTORTHR: cpi MotorThr,MotorThrMAX ; wenn schon Maximalwert breq INC_MOTORTHR_RET ; dann nicht erhöhen inc MotorThr ; sonst erhöhe Wert INC_MOTORTHR_RET: ret ; MotorThr verringern DEC_MOTORTHR: cpi MotorThr,MotorThrMIN ; wenn schon Minimalwert breq DEC_MOTORTHR_RET ; dann nicht verringern dec MotorThr ; sonst verkleinere Wert DEC_MOTORTHR_RET: ret ; TempDiff-Pins auf Standard setzen RESET_HIGH_TEMP_DIFF_PINS: cbi PORTB, 6 sbi PORTB, 7 ret MOTORLOOP: ; Dauer ca. 90 ms ;von current_motor_thr bis 0 runterzählen mov motorloopcounter,MotorThr sbi PORTB,MOTOR ; Motor ein MOTORLOOP_EIN: rcall MY_DELAY dec motorloopcounter brne MOTORLOOP_EIN cbi PORTB,MOTOR ; Motor aus ; von (255-current_motor_thr) bis 0 runterzählen und Motor aus ldi motorloopcounter,255 sub motorloopcounter,MotorThr MOTORLOOP_AUS: rcall MY_DELAY dec motorloopcounter brne MOTORLOOP_AUS ret LEDBLINK: ; Schleifenzähler immer modulo 256 zählen dec LED_loop brne LED0BLINK ; ist = 0? ; LED_loop zurücksetzen. Dabei high_temp_diff beachten. mov LED_loop, ledblink_loopvalmax_current LED0BLINK: cpi LED0_on,0 ; Test, ob Blinken (LED 0 für "Temperatur runter") überhaupt erwünscht breq LED9BLINK ; LED einschalten? cp LED_loop, ledblink_loopval_current brlo LED0_EIN LED0_AUS: cbi PORTD,0 rjmp LED9BLINK LED0_EIN: sbi PORTD,0 LED9BLINK: cpi LED9_on,0 ; Test, ob Blinken (LED 9 für "Temperatur rauf") überhaupt erwünscht breq LEDBLINK_ENDE ; LED einschalten? cp LED_loop, ledblink_loopval_current brlo LED9_EIN LED9_AUS: cbi PORTB,4 rjmp LEDBLINK_ENDE LED9_EIN: sbi PORTB,4 LEDBLINK_ENDE: ret MY_DELAY: ; Dauer: 193,25 us wdr ; Watchdog zurücksetzen ldi mydelay,255 MY_DELAY_LOOP: dec mydelay brne MY_DELAY_LOOP ret STARTUPLOOP: ldi startuploopcounter,STARTUPDELAY STARTUPLOOP_INNER: rcall MOTORLOOP dec startuploopcounter brne STARTUPLOOP_INNER ret
Angehängte Dateien:
-

Build.jpg
160 KB
Hi >.def LED0_on = r26 >.def LED9_on = r27 >.def ledblink_loopval_current = r28 ; für tatsächliches >Blinkverhalten verwendet (abhängig von Temp-Differenz stark/schwach) >.def ledblink_loopvalmax_current = r29 ; für tatsächliches Die Register r26..r31 sind in der 2313def.inc schon mit einem 'Namen' versehen worden: XL,XH,YL,YH,ZL,ZH. Daher die Warnungen. Persönlich halte ich .def-Gedödel mit Registern, milde gesagt, für sinnfrei. Mag bei kleinen Programmen noch gehen. Bei grösseren Programmen, wenn die Register für verschiedene Aufgaben benötigt werden führt das schnell zu Konfusion und bewirkt genau das Gegenteil. MfG Spess
Um das zu ürüfen, müsste man anhand der Zeilennummer in der Warnung die Zeilennummer in deinem Code suchen und entscheiden, ob die dortige Benutzung des Registers sich mit der übrigen Benutzung des gleichen Registers im Programm logisch beisst. Leider geht das in der jetzigen Form nicht, denn du hast den Quellcode als normalen Text gepostet und die Forensoftware hat zusätzliche Zeilenumbrüche eingefügt. Dadurch führen die Zeilennummern in den Warnings zu nichtssagenden Stellen im Quellcode...
Hi Nochmal: Die Register r26..r29 sind schon mit einer .def-Anweisung belegt! MfG Spess
Spess hat bereits den richtigen Hinweis geschrieben. In deinem Programm sind die Warnungen vernachlässigbar, weil die Alternativnamen XL,XH,YL,YH,ZL,ZH nicht benutzt werden. Du musst allerdings aufpassen, wenn du das mal änderst.
>Beim compilieren bekomme ich 4 Warnungen (siehe Bild). Das Compilieren heisst hier übrigens Assemblieren... >Kann ich die vernachlässigen? Ja. Die X,Y und Z Register werden nicht verwendet.
Angehängte Dateien:
-

FUSE_BITS.jpg
140 KB
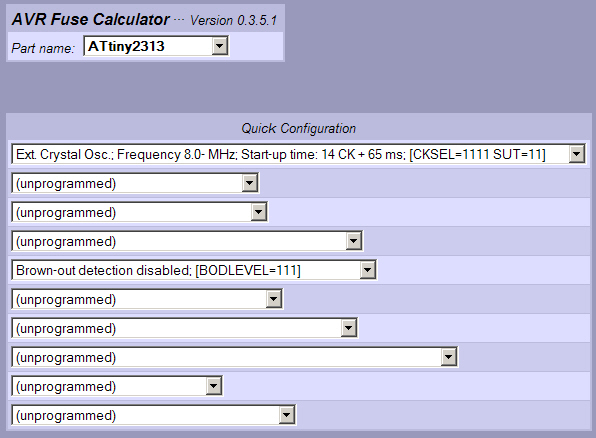
Vielen Dank für die superschnellen Antworten. Das sollte ja dann auch auf den ATtiny2313 zutreffen, den ich einsetzen möchte? "tn2313def" antelle von "2313def.inc" Das ganze soll mit einem 8Mhz Quarz laufen. Sind die Fuse Bits o.k.?
>Sind die Fuse Bits o.k.? ja >Das sollte ja dann auch auf den ATtiny2313 zutreffen, den ich einsetzen >möchte? "tn2313def" antelle von "2313def.inc" auch ja
Hi! >.def LED0_on = r26 >.def LED9_on = r27 >.def ledblink_loopval_current = r28 ; für tatsächliches >Blinkverhalten verwendet (abhängig von Temp-Differenz stark/schwach) >.def ledblink_loopvalmax_current = r29 ; für tatsächliches schreibe mal: .def LED0_on = XL .def LED9_on = XH .def ledblink_loopval_current = YL ; für tatsächliches Blinkverhalten verwendet (abhängig von Temp-Differenz stark/schwach) .def ledblink_loopvalmax_current = YH ; für tatsächliches dann sollten die Meldungen weg sein. Gründe siehe oben. Viel Erfolg, Uwe
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.