Falk Brunner wrote:
>...
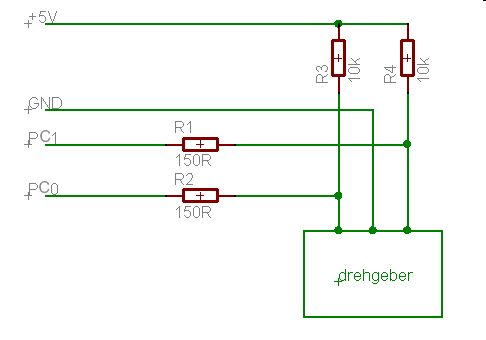
>>#define PHASE_A (PINC & 1<<PINC0) // PINC.0
>>#define PHASE_B (PINC & 1<<PINC1) // PINC.1
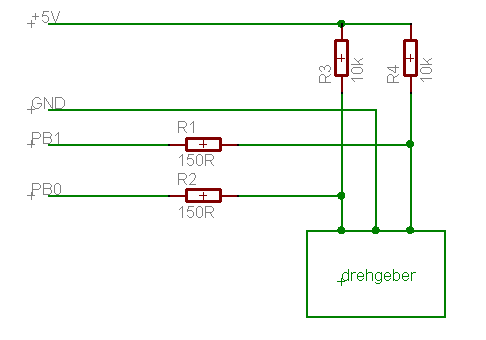
> Hier steht PINC, in deinem Schaltplan PINB?!?
ach, verdammt, der schaltplan ist falsch PINC ist natürlich richtig.
wie oben beschrieben: der drehgeber arbeitet auch.
auf meinem display ausgegeben gibt mir ja ein "+1" bei rechts- und ein
"-1" bei linksdrehung. das scheint mir doch ok zu sein??
wenn ich da nicht verkehrt liege müßte doch dann mit folgenden Zeilen:
1 | cli();
|
2 | encoder += enc_delta;
|
3 | enc_delta = 0;
|
4 | sei();
|
...die Variable
ihren Wert entsprechend dem Drehgeber ändern ??!