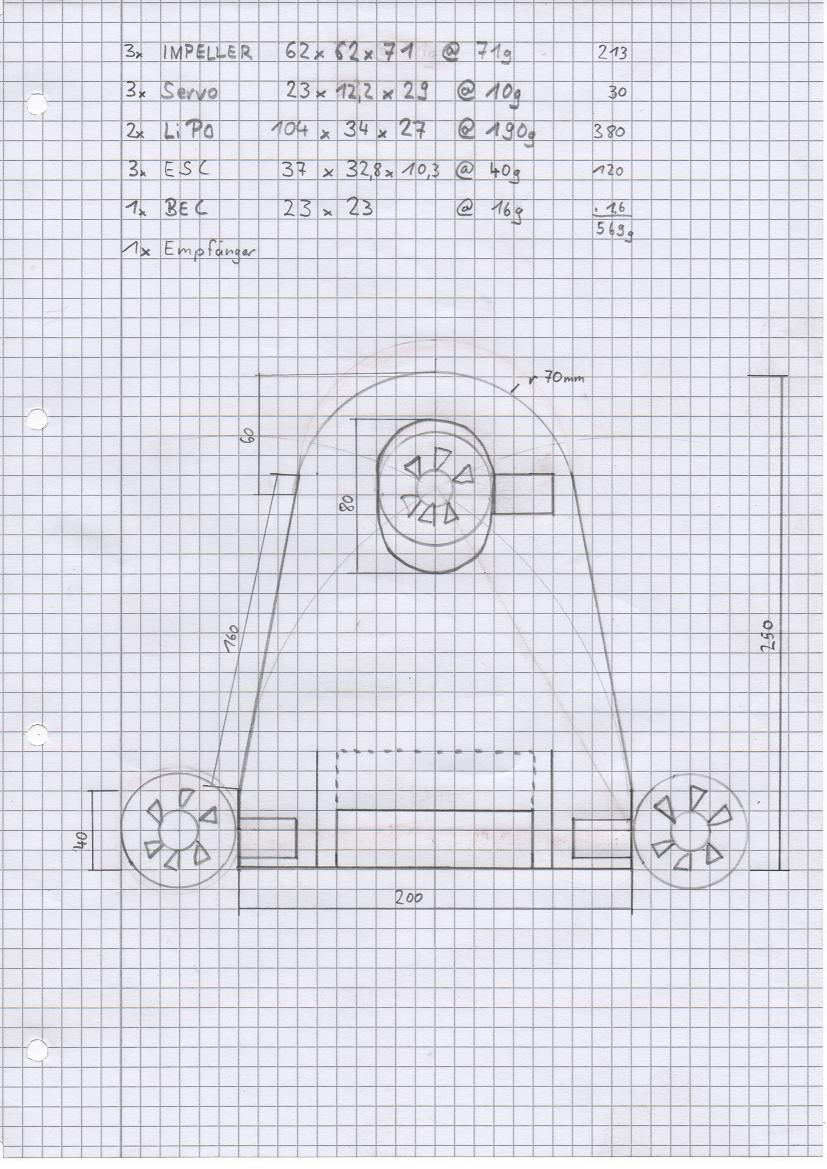
Hallo, Ich habe mein neues Projekt schonmal in ein anderes Forum geschrieben, aber ich glaube das war das falsche, also versuche ich es mal bei euch :-) Hier ist mein Projekt: Ich möchte einen Senkrechtstarter (VTOL) bauen, der zum Schluss auch autonom fliegen soll. 1. Technik: Als Antrieb verwende ich 3 Brushless- Motore mit Impeller- Aufsatz, die jeweils einen Schub von ca. 680g erzeugen. Die Steuerung der Motore wird über Brushless- Reglern reallisiert, die man über PWM ansteuert. Um auch wirklich damit fliegen zu können sind noch 3 Servos als Aktuatoren an den Motoren montiert, die eine Schub- Vektor- Steuerung ermöglichen. Somit sind die Motoren in der X- Achse schwenkbar. Die Servos sind auch mit einer PWM ansteuerbar. Die Sensorik beinhaltet 3 Gyros zur Stabilisierung der X- und Y Achse. Als Maßnahme gegen Drifts müssen auch Beschleunigungssensoren eingebaut werden. Die Spannungsversorgung des VTOL Liefert ein Li-Po Akku mit 22,2V und 2500mAh und 20C. Nun muss noch ein Mikrokontroller als Steuerung ausgesucht werden. Leider habe ich da noch nicht so viel Ahnung und wende mich damit an euch, ich hoffe jemand kann mir da helfen. Nun Zur Funktionsweise: Das VTOL in die Höhe bewegen. Dies bedeutet, das bei einem Anstieg des Schubs die Erdanziehundskrafte überwunden werden. Um Drifts und den Bodeneffekt entgegenzuwirken müssen die Servos dementsprechend die Impeller in die entgegengesetzte Richtung steuern, um gerade nach oben zu kommen. Sollte das nicht ausreichen, muss die Drehzahl eines Impellers nachgeregelt werden, um einen Absturz zu vermeiden. Dazu ist ein 3- Achsen Gyro nötig. Das VTOL auf einer Position halten Um das VTOL nach erfolgreichen Aufstieg auf einer Position halten zu können, ist ein Beschleunigungsmesser für nick und roll nötig. Der Beschleunigungssensor gibt der Steuerung Auskunft darüber, in welche Richtung der VTOL wegdriftet, die Steuerung wird dann versuchen, dies durch die entsprechende Anstuerung der Servos zu unterbinden. Sollte auch dies nicht ausreichen, wird auch hier die Drehzahl der Impeller nachgeregelt. Vorwärtsflug des VTOL Um nach vorne zu fliegen, werden die Impeller durch die Servos solange in der Nick Achse gedreht, bis die gewünschte Geschwindigkeit erreicht ist (Vektorsteuerung?). Die Geschwindigkeit kann dann durch Zurückstellung wieder gedrosselt werden, bis zum Stillstand. EIne Art Schubumkehr kann auch realisiert werden, wenn die Servos um 180° gedreht werden (falls dies technisch möglich ist). Kurvenflug des VTOL Der Kurvenflug wird durch die Drehzahl der beiden hinteren Impeller geregelt. Wenn man beispielsweise eine Rechtskurve fliegen will, dann verringert sich die Drehzahl des rechten Impeller zeitgleich erhöht sich die Drehzahl des linken Impeller. Landen des VTOL Falls dies alles in 100 Jahren geklappt hat, gestaltet sich der Landevorgang umgekehrt des Startvorgangs. Eine Skizze mit der groben Aufbauweise habe ich auch dazugefügt. Vielleicht könnt Ihr mir ja bei der Auswahl des richtigen Controllers und ein bei paar programmfragen helfen ;-) Greez Alex
Angehängte Dateien:
-

vtol1.jpg
170 KB
> Eben kein Quadrokopter,... ist doch wurscht, ob tri-,quad-,hex-,okto oder sonstwie das prinzip bleibt immer das selbe. nur die motor-vektoren werden unterschiedlich berechnet. und das geht mit der UAVP-Platine für alle varianten http://uavp.ch/moin
allerdings, ... Fliegen heisst landen, und wer noch nie etwas geflogen hat, wird wohl die probleme, selten in den griff bekommen. ;-)
eben doch quadrokopter. oder wo sind deine tragflächen? ob du das ganze teil über den schub drehst, oder nur die schubachse ist doch egal. ideen: - programmier dir einen simulator am pc - bau es erstmal als flächemodell auf und guck ob es fliegt. ansonsten nimm die quadrocopter steuerung und 3 brushless controller und bau dir eine platine für die servos. (i2c)
> oder wo sind deine tragflächen? der rumpf kann im marschflug tragen. sowas gibts schon als modell. hier noch eine andere variante mit impeller. http://www.taileron.de
Hallo Jürgen, Der Taileron ist schon genau das, was ich bauen will,... Nur der Teileron 900 wiegt 7,5 Kg :-( Mein Vtol soll aber nur 700- 800g wiegen. @ jo, wenn Du es so willst dann ist es ein "quadrokopter" Wobei der Quadrokopter ja 4 Achsen hat, also ein Trikopter. Aber ein Quad- oder Tri. Kopter hat keine Schub- Vektorsteuerung. Wenn ich einen Simulator programmieren könnte O.o dann würde ich. Aber ich hab leider das know how nicht. Ich möchte gerne wissen, welchen avr ich benötige, Ich hab gelesen, um das Ding via pwm zu steuern, benötige ich pro pwm signal jeweil einen 16bit Timer. Stimmt das? Das wären insgesamt 6 kanäle, 3 für die Servos und 3 für die motore. Hinzu kommt noch, die Sensorik, die Winkegeschwindigkeitsmesser, und die Beschleunigungsmesser. Keine Ahnung wie man die auswertet. Anscheinend mit PID Regelungen. Ich schlage mich weiter durch mit dem Lesen des Forums.
Du brauchst definitiv einen Simulator. Verwende Flightgear, jede UAV Anwendung verwendet entweder den, Microsoft Flight Simulator, da gibt es aber Probleme wegen der Terrains laden, weil propietaeres Format, oder einen Eigenenes wenn GLASS oder dergleichen implementiert wird. Du musst den nicht programmieren, sondern nur konfigurieren, ok es ist ein bisschen Arbeit, aber es geht nicht ohne.
Du brauchst definitiv einen Simulator. Verwende Flightgear, jede UAV Anwendung verwendet entweder den, Microsoft Flight Simulator, da gibt es aber Probleme wegen der Terrains laden, weil propietaeres Format, oder einen Eigenenes wenn GLASS oder dergleichen implementiert wird. Du musst den nicht programmieren, sondern nur konfigurieren, ok es ist ein bisschen Arbeit, aber es geht nicht ohne, wenn du selbst eine Steuerung entwickelst. Du brauchst einen Hardware in Loop steuerung, die du am Simulator anschliessen kannst.
> Aber ein Quad- oder Tri. Kopter hat keine Schub- Vektorsteuerung. IRRTUM , ;-) dieser hat flugzulasung in den USA, bis 2m flughöhe. http://www.moller.com da später eh durch coprozessoren navigiert wird, reicht eigentlich für die steuerung ein ATMEGA168, der hat auch genügend PWM-ausgänge. hier, ist sicherlich stoff zum studieren für die nächsten 3 jahre. ;-) http://forum.xufo.net/bb/viewtopic.php?p=37323
@ Criss als Sim hab ich den phoenix ;-) ( Als Alter Hubschrauberflieger ist ein Sim Pflicht!) Mal sehn, ob ich da dieses Modell zum laufen bringe. @jürgen Moller ist Cool!!!!! Ähhh,... Coprozessoren? Wie meinst du das?
> Ähhh,... Coprozessoren? Wie meinst du das?
Häää? ;-)))
zum beispiel sind im MK inzwischen bis zu 9 prozessoren am wirken.
1x lagesteuerung, 4x motorensteller, 1x kompass, 1xGPS, 1x navi,
1x OSD, .... und viele werden folgen.. ;-)
Ah ja, hab verstanden glaub ich,... :-) Wenn ich das richtig verstehe, brauche ich den 169 als Main, der mir die Lagekontrolle macht. Der 169er steuert dann die Servos und die Motore mittels an. Aber ich brauche die Co dann für spätere Erweiterungen. Also reicht für die Grundfunktionen der 169er, der mittels Sensorik und PID berechnung die Aktuatoren per pwm ansteuert. Wenn ich also meinetwegen die GPS Funtkion hinzufügen möchte, brauche ich einen Co der mir die ausgerechneten GPS Daten mittels I²C an den Main schickt. Richtig?
Eventuell auch mal beim XMega umschauen. Der hat so einiges mehr an Peripherals und Power.
warum nicht gleich, einen ARM9 drinne verbauen ?? wie in der MK-NC, STR911FAM ;-)))
jürgen wrote:
> wie in der MK-NC, STR911FAM ;-)))
Kenn ich beides nicht und google spuckt auch nix aus,...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.