Hallo an Alle, ich versuche gerade einen Brushless Motor in Betrieb zu nehmen. Grundsätzlich funktioniert das auch schon sehr gut, nur leider mit Spannungen < 7,5 Volt. Sobald ich die Spannung auf 8 Volt oder 11,1 Volt (spätere Betriebsspannung) erhöhe hält der Motor einfach an. Mit ist grade völlig unklar warum dies passiert. Grundsätzliches zum Aufbau: Der Motor ist ein Brushless Motor ohne Hall Sensoren, ich nutze also die Induktion des Motors um dessen Position zu erkennen und entsprechend zu kommutieren. Dazu habe ich einen virtuellem Stern (bestehen aus Widerständen und Kondensatoren zur Filterung des PWM Signals) aufgebaut und dessen drei Phasen mit je einem analogen Comparator mit dem Mittel der drei Phasen verglichen. Die Ausgänge des Comparators sind mit einem FPGA gekoppelt, der die Steuerung vornimmt. Momentan macht das FPGA eigentlich nichts anderes als eine Flanke an den drei analog Comparatoren zu erkennen und direkt in die nächste Phase zu schalten. Das PWM Signal (15 KHz) wird auch durch das FPGA erzeugt und ist mit den einzelnen Ausgängen für die Mosfets verundet. Als Mosfets benutze ich die BTS7960, da diese sich für diesen Zweck sehr gut eignen. Mich wundert das sehr, dass der Motor einfach stehenbleibt, sobald ich die Spannung erhöhe. Vor allem ist es nicht so, dass der Motor sich bei leichter Erhöhung der Spannung schlechter dreht, er bleibt sofort stehen. Ich wäre sehr dankbar, wenn mir jemand weiterhelfen könnte. Gruß, Christoph
hast du dir mal die Polradspannung am oszilloskop angesehen? schau sie dir mal bei erhöhung der spannungan, vielleicht wird sie verzerrt und es ist keine eindeutige positionserkennung mehr möglich ;)
Was genau meinst du mit Polradspannung? Wo genau messe ich die? EMV ist natürlich etwas worauf man achten muss, aber hatte damit noch nie Probleme und würde mich wundern wenn das Problem was ich habe durch EMV entsteht...
Polradspannung ist die zurück induzierte Spannung mit der du die Position ermittelst, um zu richtigen Zeit zu kommutieren ;) Auch EMK genannt. die EMK misst du zwischen Phase und Sternpunkt. bei drei phasen jeweils phase gegen sternpunkt. z.B. http://www.elektroniknet.de/typo3temp/pics/5fd1f0ad35.jpg
Polradspannung ist die zurück induzierte Spannung mit der du die Position ermittelst, um zu richtigen Zeit zu kommutieren ;) Auch EMK genannt. die EMK misst du zwischen Phase und Sternpunkt. bei drei phasen jeweils phase gegen sternpunkt. z.B. http://www.elektroniknet.de/typo3temp/pics/5fd1f0ad35.jpg im englischen Back EMF: http://zone.ni.com/cms/images/devzone/ph/42517a871151.gif
Angehängte Dateien:
-

Bild1.jpg
480 KB
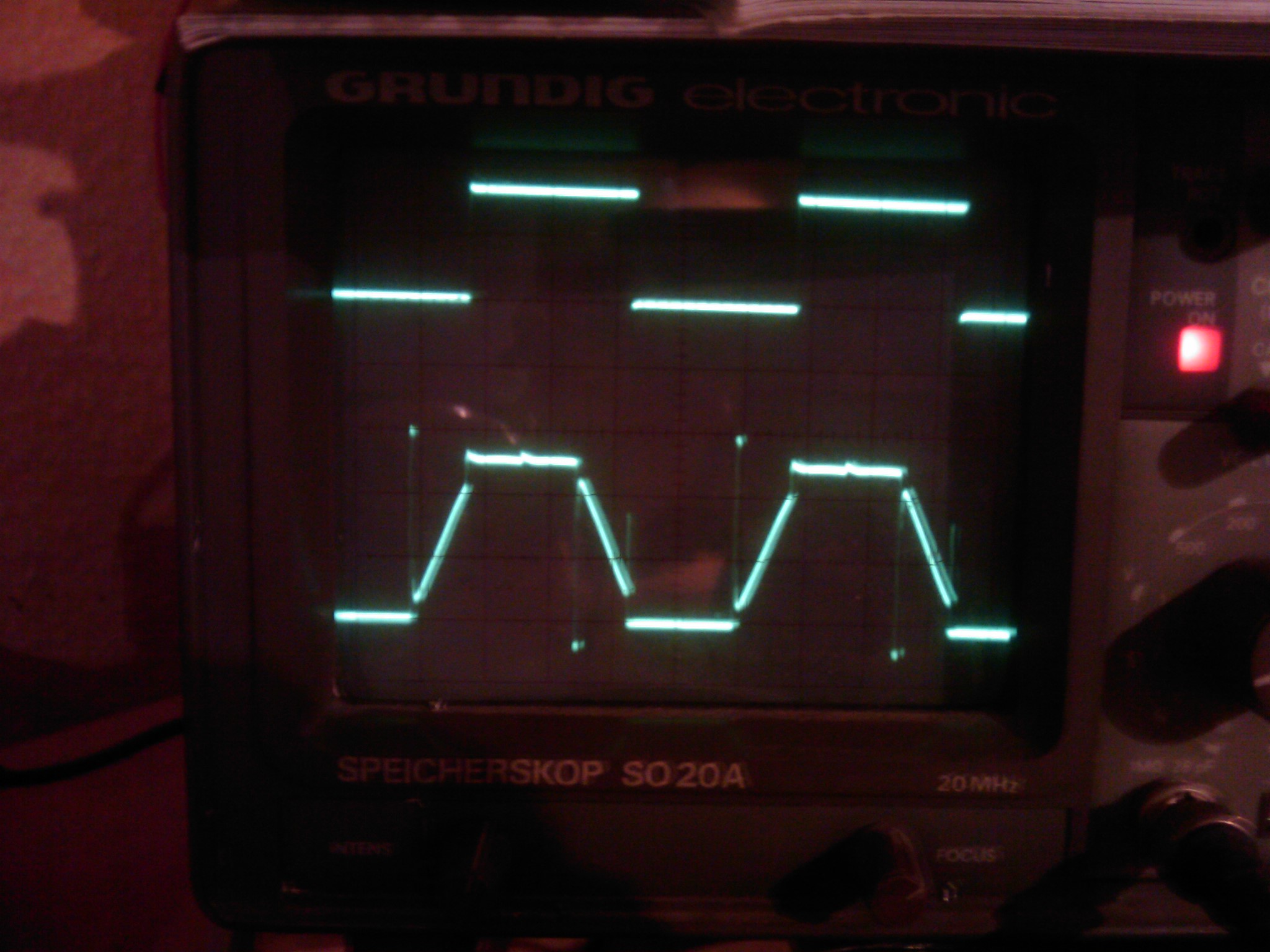
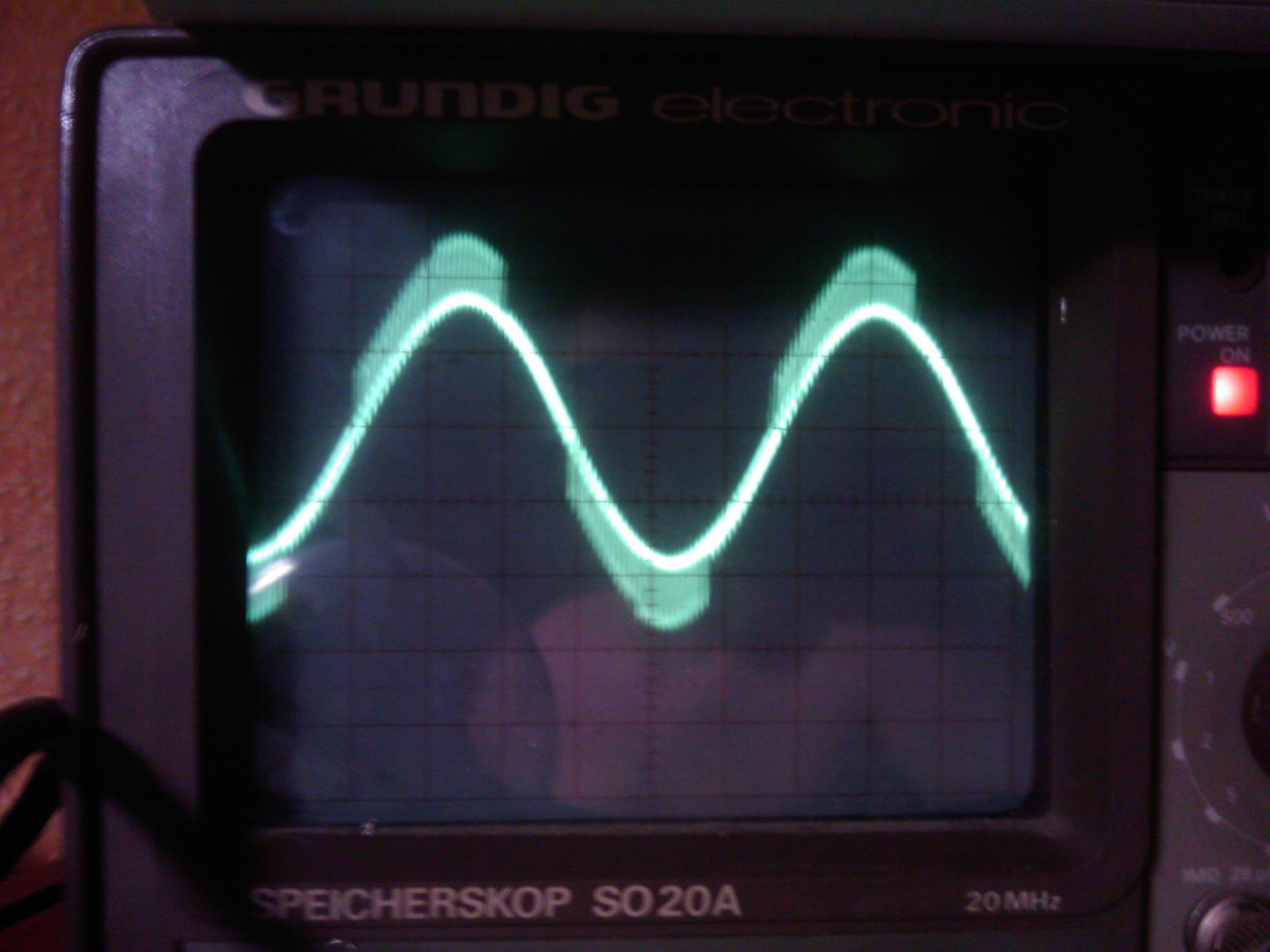
So bin jetzt mal eingeloggt, wusste garnicht dass ich hier shconmal nen Account erstellt habe. Anbei mal 2 Fotos vom Oszi. Das erste Bild (Bild1.jpg) zeigt oben den Ausgang des analog Comparators von Phase C (in Beziehung zum Mittel) und unten die Phase C direkt am Mosfet. Warum dort gerade diese zwei Spikes pro Periode (einmal nach unten, einmal nach oben) zu sehen sind weiss ich auch gerade nicht, der Sache muss ich nochmal auf den Grund gehen. Das PWM Signal ist auf 100% und ich glaube mein Netzteil geht auch in die Strombegrenzung, da es nur 5A kann. Das zweite Bild (Bild2.jpg) zeigt auch Phase C, jedoch gemessen zwischen den beiden Eingängen des analog Comparators, also Mittel und Phase C. Hier habe ich das PWM Signal auf cs. 30% geregelt (mit 15kHz). Ist generell ja eine schöne Sinus-Schwingung, jedoch sieht man deutlich die Ripple vom PWM Signal, obwohl ich ein RC-Glied einsetze. Die Ripple werden mit Erhöhung der betriebsspannung größer. Im Bild habe ich die Betriebsspannung gerade so hch gewählt, dass der Motor gerade noch flüssig läuft. Ein kleines bisschen mehr und der Motor bleibt sofort stehen. Vielleicht hilft das bei der Analyse weiter. Ich weiss momentan nicht genau woran das liegen kann. Meine Vermutung jedoch ist das PWM Signal, evtl muss das besser gefiltert werden. Eine weitere Möglichkeit wäre eine falsche Ansteuerung des Motors. Optimal wäre ja auch 30° zu warten nach jedem Null-Durchgang. Dies lasse ich momentan noch komplett weg.
{kind=link}
{kind=link}
Ich habe mir noch ein paar Gedanken zu den Bildern gemacht. Ist es denn richtig, dass das PWM Signal der Phase C genau bei dem Nulldurchgang der Phase C anfangen muss und bis über die Kurve hinaus anhält? Wie müsste das idealerweise aussehen, damit der Motor so effizient wie möglich ist?
Ich habe das Problem soeben gelöst. Es lag an der Back EMF ermittlung. Ich hatte die Schaltung von Mikrokopter.de nachgebaut und die Ausgänge an einen externen Analog Comparator gehangen. In der Schaltung von der Mikrokopter-Seite sind alle Widerstände 4,7K groß und die Kondensatoren 100nF, ich habe nun einfach die Widerstände, die direkt an den Phasen hängen verdoppelt, damit die Spannung am Comparator kleiner wird und dadurch funzt es. Erklären kann ich mir dies leider bisher noch nicht, aber ich vermute der Comparator kam mit den höheren Spannungen nicht klar. Jetzt geht es auf jeden Fall erstmal, trotzdem wüsste ich gerne welches eigentlich die beste Methode ist, wie man die Widerstände und Kondensatoren dimensioniert und verschaltet, da ich inzwischen schon viele verschiedene Lösungen gesehen habe: - Ganz ohne Kondensatoren (wobei ich da nicht weiss wie das PWM Signal rausgefiltert wird) - Die Schaltung von Mikrokopter.de - Eine ähnliche Schaltung wie auf Mikrokopter.de, jedoch mit wesentlich größeren Widerständen und Kondensatoren um 10nF - und ich habe auch eine Schaltung gesehen, die das Mittel was der Comparator mit Phase A vergleicht aus Phase B und Phase C bildet. Im moment funktioniert das ganze zwar, aber ich tendiere gerade zur letzten Variante.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.