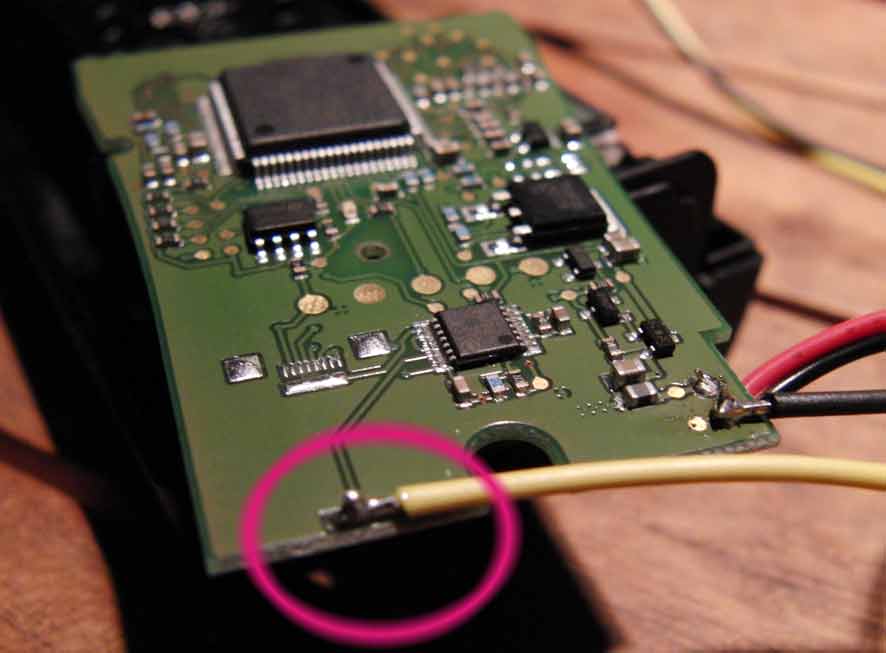
Liebes Forum, fuer einen autonomen Haushaltsroboter moechte ich aus einem guenstigen Laser-Entfernungsmesser einen 2D-Laserscanner bauen. Dazu habe ich mir einen "Stabila LE-20" fuer ca. 100 Euro zugelegt, weil der einen Dauerbetrieb bei ausreichender Genauigkeit erlaubt. Vor dem Strahl-Austritt soll ein Spiegelprisma auf einem Servo montiert werden, dass nach einer Messung immer um ca. 1° weitergedreht wird... Jedenfalls muessen aus dem Geraet irgendwie die Messwerte herausgezogen werden. Einen vielversprechenden Abgriffspunkt habe ich auch auf der Platine gefunden. Hier wird ca. 1 mal pro Sekunde ein 3,3 V Puls-Signal ausgegeben. Es beginnt mit einem laengeren LOW und darauf folgen 14? Pulse von ca. 0,2 ms abwechselnd HIGH und LOW. Bei Veraenderung der Messentfernung aendert sich hauptsaechlich die Laenge der ersten LOW-Phase. Leider habe ich kein Digital-Oszi 8-(, so dass ich Euch keine genaueren Informationen geben kann. Meine Hoffnung, dass es sich hier um Standart-rs232-Signale handelt, hat sich leider nicht erfuellt. Hat jemand von Euch schon mal mit so einem Geraet experimentiert, oder erkennt jemand in meiner zweifelhaften Beschreibung des Signal ein genormtes Protokoll? Bin fuer jeden Hinweis dankbar, arne p.s. auf dem dicksten Chip steht ein LEICA 752912 38024B83HV
Angehängte Dateien:
-

LE-20.jpg
30 KB
Es gibt sowas doch auch mit serieller Schnittstelle.
Ist blos fast um den Faktor 10 teurer. Darum das Selbstbauprojekt.
> Es gibt sowas doch auch mit serieller Schnittstelle.
Wo? Auch für Entfernungen um die 500 Meter?
Schau doch mal was an den goldenen Testpunkten so rauskommt...
Ach und mach doch bitte mal ein zwei Fotos von dem Sensor ansich - würd mich mal interessieren wie das ausschaut ;)
Da liegt nichts weiter an. Ich glaube, ueber diese Testpunkte wird die Firmware oder die Kalibrierung in das eeprom geladen. Dies kann auch bei geschlossenem Gehaeuse erfolgen. Im Batteriefach sind die Loecher ueber den Punkten nur mit Klebeband verschlossen.
Hast Du ALLE überprüft? Also nicht nur die 5 großen da sondern auch die ganzen kleinen?
Also zu den kleinen auf dem Foto: - die links haben entweder 0V oder 3,3V und ein konstantes Rechteck Signal von ca 0,05 ms (wahrscheinlich interner Takt) - hinten links (wegen Unschaerfe nicht sichtbar) die Ansteuerung fuer das Display - vorne rechts die Versorgungsspannungen vor und hinter dem Spannungsregler LM 317 - hinten rechts wird es interessant. Dort wird der Takt an den Sensor geschickt und kommt zurueck. Die unterschiedlichen Messpunkte repraesentieren wahrscheinlich verschiedene Signalaufbereitungen durch den Prossessor, weil sie mal mit mehr oder weniger Rauschen unterlegt sind. Bei diesen aendert sich auch das Signal, wenn sich die Messentfernung aendert. An den anderen Messpunkten tut sich bei Entfernungsaenderungen nichts.
Tjo - kann ich so auch nix zu sagen - aber evtl. kannst Du auch die Signale vom Display abgreifen und entsprechend dekodieren. Umständlich wegen dem Multiplexing, sollte notfalls aber auch klappen.
Hi Ich würde an deiner stelle eine kleine Tabelle von den Signal machen, in Abhänigkeit von der Entfernung. Wenn die 12 Takte immer gleich sind, dann könnten sie eine Zeitbasis bilden zum Signal davor. Das ist alles Schwer zu sagen, wenn du nicht zusammengehörende Paare sammelst.
Für die Anwendung des Laserscanners auf einem mobilen Roboter scheint mir die Sampling-Rate entscheidend. Ein professionieller Lasscanner enthält einen schnell drehenden Spiegel und die Abtastzeit für einen Einzelschuss ist sehr hoch. Bei den Billigentfernungsmessern vermute ich, dass man nur ale 2 Sekunden einen Messewert bekommt, was das Ganze für mobiel Roboter unbrauchbar macht, wenn man nicht im Schneckentempo fahren will. Mit welcher Samplinrate kann man beim Billigentfernungsmesser wirklich rechnen? Gruß, zero
Interessantes Projekt. Findet die Signalauswertung noch innerhalb des Sensors statt oder macht das die Elektronik auf der Platine? Wie sieht der Sensor aus, kannst Du da mal ein Foto von machen? Oder mehrere?
@zero so auf 3 Samples pro Sekunde im kontinuierlichen Betrieb kommt der schon. Bei einem Wunschueberwachungsbereich von 60 Grad und einer Aufloesung von 1 Messung pro Grad, haette ich einen Scan in 20 Sek abgeschlossen. Die Hindernisserkennung soll mit diesem Sensor eh fuer den Bereich zwischen 2 und 5 Meter laufen, so dass der Roboter noch genuegend Zeit haette zu reagieren. @tom die Auswertung passiert erst im Prozessor auf der Entfernungsmesserplatine. Fotos von dem Sensor mache ich noch. Man kann da nicht viel erkennen. Der Sensor inst in einem Magnesium Gehaeuse. Vorn ist der Austritt von dem Laser, daneben eine ca. 15 mm Sammellinse, fuer den Empfaenger. Das Gehaeuse moechte ich nicht oeffnen, weil ich befuerchte, das dort vielleicht etwas (z.B. der Fokus) verstellt wird.
>> Das Gehaeuse moechte ich nicht oeffnen, weil ich befuerchte, das dort >> vielleicht etwas (z.B. der Fokus) verstellt wird. Das ist vielleicht besser so auf Bilder wartend
Hab gerade mal gegoogled und gesehen, dass es sowas schon für 50€ gibt: http://www.plus.de/is-bin/INTERSHOP.enfinity/WFS/Plus-PlusDE-Site/de_DE/-/EUR/ShopViewShortLink-Product?ProductSKU=45819800&RefID=PSM_813_0909_10_01 Werd ich mit wohl mal bestellen
Der Plus Einhell NLD 20 ist scheinbar genau der gleiche. Die Platine sieht zumindest gleich aus.
Da an der Stelle und gegenüber das Signal 180° Phasenverschoben ausgegeben wird scheint mir das für einen Akustischen Signalgeber zu sein. Hab gleich mal einen Pizo drangehängt und bei jeder erfolgreichen Messung kommt ein Beep.
Und noch mehr: durch die 5 Löchern im Batteriefach kommt man mit Aufsetzkontakten scheinbar an eine Art RS232 Serviceschnittstelle. ?, RX, TX, GND, VCC. Datenrate 19200 3,3V TTL Pegel. Beim Einschalten kommt ?<CR><LF>. Reaktion auf gesendete Zeichen hab ich nicht bekommen. Gruß Chris
Angehängte Dateien:
-

lasermeter6.jpg
150 KB
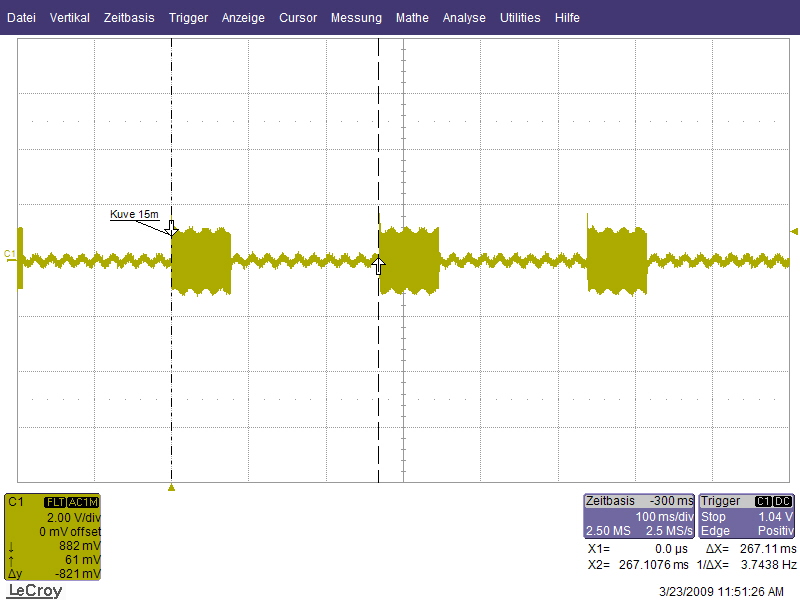
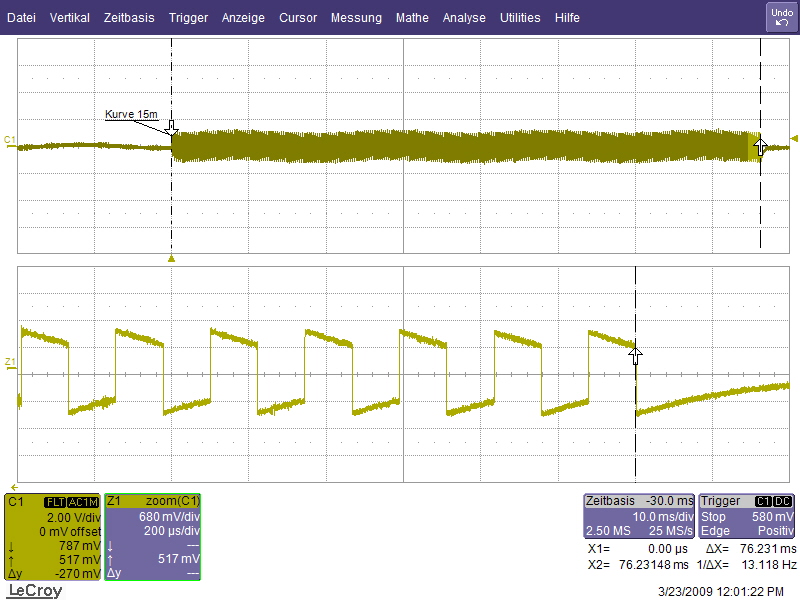
Ich glaube, dort wird das eeprom nach dem Zusammenbau mit Firmware oder Korrekturdaten gespeisst... Ein Kollege mit gutem Oszi hat mir meinen vermeindlichen Ausgang mal vermessen. Ich poste hier mal die Bilder. Hier eine ganze Messperiode (ca. 0,3 Sek) bei 15 m Entfernung. Leider hat es keine Veränderung der Daten bei Änderung der Messentfernung gegeben. Er versucht nochmal, brauchbare Signale an anderen Punkten zu finden.
Angehängte Dateien:
-

lasermeter7.jpg
150 KB
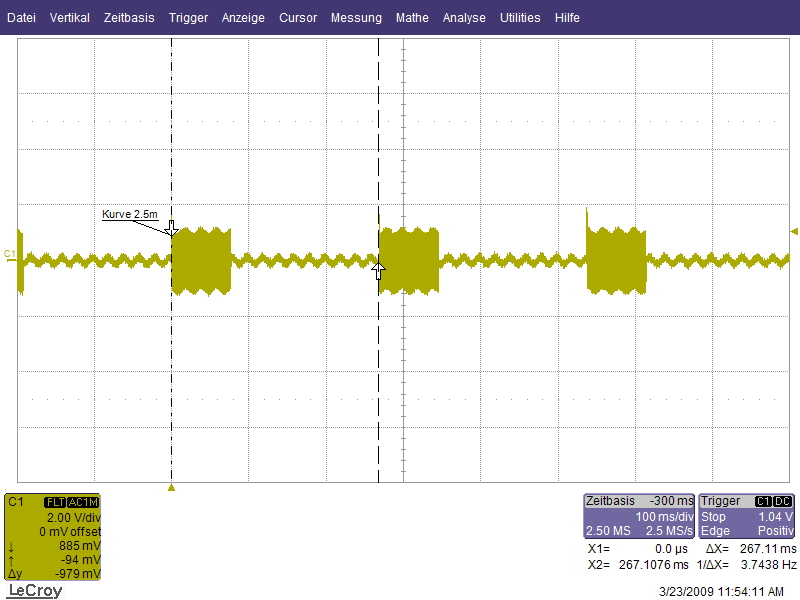
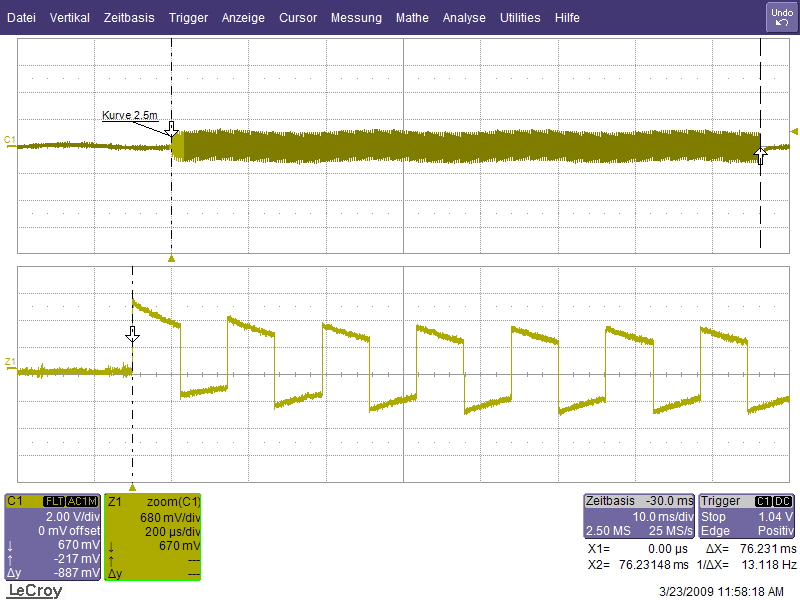
Eine ganze Messperiode (ca. 0,3 Sek) bei 2,50m Entfernung
@Chris Du hast wahrscheinlich recht, dass der Ausgang nur fuer einen Beeper gut ist 8-(
Hallo, mal wieder hochkram.... hat sich in der Richtung noch irgendwas ergeben???
bin auch grade auf den beitrag gestoßen hat sich was getan?
Hallo, hast du dem Entfernungsmesser irgendwas entlocken können? Viele Grüße Patrick
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.