Hallo Robo- und Elektronik-Freaks! Das mag sich jetzt etwas merkwürdig anhören: Ich möchte einen Roboter bauen und habe null Ahnung von Elektronik. Dafür aber um so mehr von CNC fräsen. Eine Firma beauftragen, das kann ich mir als Azubi nicht leisten. Deshalb schlage ich einen fairen Deal vor. Ihr helft mir mit meinem Robi und ich fräse für euch die ein oder anderen Teile. Referenzen meiner Fräsarbeiten findet Ihr unter aufschrauben.de (Rubrik Spezialprodukte, das ist mein kleiner Hobby-Shop). -= Der Roboter =- Er soll mir dabei helfen Kleinteile zu archivieren. Habe mir das so vorgestellt: Man legt ein Kleinteil (z.B. eine Unterlegscheibe, eine kleine Mutter, eine Feder oder sonstiges) in eine Box. Nun soll der Roboter über dieses Kleinteil so viele Daten wie möglich sammeln, nämlich: A) 6 Fotos (wie beim Würfel, also von jeder Seite) B) Bestimmung der Größe, um herauszufinden wie gross die Ablage für dieses Teil mindestens sein müsste C) Bestimmung des Materials (Metall oder Kunststoff?) D) Wenn leicht realisierbar, Bestimmung der Farbe E) Prüfen ob das Material eine Magnetische Kraft hat F) Prüfen ob ein Magnet das Material anziehen kann G) Gewicht hat der Roboter diese Daten gesammelt, soll er sie in Form einer CSV Datei (Kommata getrennte Werte) abspeichern. Die Kleinteile erhalten so eine Art fortlaufende "Seriennummer" in der Datenbank. Alle Fotos die der Roboter macht müssen den einzelnen Kleinteilen zugeordnet werden können und die Dateinamen sollen eine bestimmte Struktur aufweisen, z.B. "5412-3.jpg" für das Kleinteil Nr. 5412 aus Perspektive Nr. 3 (z.B. draufsicht von oben). Für das Fotos-machen kann man vielleicht eine/mehrere Digicams zerlegen und ein bisschen verkabeln, dachte ich. Diese Daten soll der Robi an einen Computer übertragen können, d.H. der Ordner mit all den Fotos und die CSV Datei. Für die Mechanik hätte ich schon einige Ideen parat und auch zu einigen Messverfahren nur von der genauen elektronischen Umsetzung habe ich keine Ahnung. Ich hoffe das hier der ein oder andere Zeit und Lust hat mich bei meinem Projekt zu unterstützen. Für Materialkosten komme ich natürlich selber auf, auch wenn ich im Gegenzug für Euch Robo-Teile fräse. Ich kann Euch z.B. aus einer Aluplatte ein Chassis mit perfekt massgeschneiderten Bohrungen und Schlitzen bauen, kein Thema. Oder auch aus Acrylglas. Was Ihr wollt! :-) Noch ne Gegenleistung die ich anbieten kann währe PHP / MySQL Programmierung (habe z.B. das Fun-Portal megacontest.de für ne Firma geproggt). Meldet Euch ich würde mich sehr freuen!!! MfG Franz
Hallo Franz Ich Studiere E-Technik und muß Dir sagen das das was Du da vor hast eine wirkliche Herrausforderung ist. Du brauchst drei wesentliche Komponenten - eine Vermessungssystem (z.B. mit ner Stereokamera, Laserscanner oder ähnliches), eine Objekterkennung und einen Greifer der alle Deine Objekte greifen kann. Im Prinzip kann man den optischen Teil mit einer (Stereo)Kamera totschlagen - die Bildverarbeitung wird jedoch ziemlich anspruchsvoll. Für Bildverarbeitung gibt es schon fertige Pakete - (z.B http://www.mvtec.com/halcon/). Da kannst Du so Sachen wie: "Wie groß ist mein Objekt, welche Farbe hat es, zu wieviel Prozent gleicht es einer M3 Mutter) einfach zusammenklicken. Ich kann Dir nur Anregungen geben - Zeit zum helfen hab ich leider keine. Gruß Dom P.S: Mit micorcontrollern kommst DU da nicht sehr weit - vielleicht für ne Schrittmotorsteuerung oder so - das wars aber auch schon.
Hallo Dominic, danke für Deine Anregungen :-) Ja im Prinzip währe das ganz praktisch wenn ein PC die Steuerung übernimmt und quasi das "Hirn" der Maschine darstellt. Platzprobleme habe ich da keine... Zu der Grössenbestimmung hatte ich mir mal gedanken gemacht. Bei einem Montagetechnik-Unternehmen hatte ich bei einer Führung mal in der Qualitätssicherung eine Anlage gesehen, die mit so "Mess-Stiften" auf die Teile getippt hat um zu sehen wie dick sie sind. Ich dachte die Maschine könnte so vorgehen: 1) das Kleinteil landet auf einer quadratischen Auflage, die an einer Ecke eine Wand hat. Die Auflage liegt schräg so das das Kleinteil dank der Schwerkraft immer unten in der Ecke liegt 2) dann kommt erstmal von links ein solcher Mess-Stift der vorne eine grosse quadratische Platte hat und schiebt sich gegen das Kleinteil, so lange bis es nicht mehr geht. Dann weiss es schon mal welche Breite es hat. 3) die Platte entfernt sich wieder vom Kleinteil 4) nun kommt von rechts auch so ein Mess-Stift mit einer Platte und misst die Länge. 5) dann entfernt auch diese sich wieder vom Kleinteil 6) und dann kommt eine solche Platte noch von Oben und misst die Höhe. das währe vielleicht eine mechanische Lösung. Es soll ja festgestellt werden, wie gross die Ablage für dieses Teil mindestens sein müsste. Nachteile sehe ich: - wenn das Kleinteil eine Druckfeder ist die sehr weich ich, dann würde die Messung die Feder vielleicht zusammendrücken und das Ergebnis währe falsch, denn die Feder ist in wirklichkeit ja grösser. - oder auch bei weichen Schaumteilen etc. die sich sehr leicht zusammendrücken lassen... Vielleicht kann man statt den Messplatten/Messstiften ja auch eine Lichtschranke nehmen die sich langsam dem Teil nähert bis sie untberbrochen wird und damit dann die höhe breite länge rausfindet. oder die optische Vermessung :-) MfG Franz
Für mich würde sich erstmal die Frage stellen wozu das ganze überhaupt gut sein soll. Das ganze hört sich nach wirtschaftlichem Nonsens an. Wer braucht schon 6 Fotos von jeder Schraube etc., wenn ich Schrauben sortieren will dann kann ich das z.B. über das Gewicht machen. Es sei denn hinter der Sache steckt mehr als Du verraten willst. mfg
wie schon gesagt, hier gehts ja nicht um Schrauben / Muttern sondern um Kleinteile aller Art. Damit meine ich auch wirklich aller Art. - abgesägte Rohrstückchen - Musterbeutelklammer - Bilderhaken - Dichtung - Bleistiftspitze - 3,5 ccm Klinkenstecker - Lötstift - Nagel - Sicherung - Widerstand - Transistor - LED - Faden - Gummiring - Glöckchen vom Weihnachtsschmuck ... eben jeden Kram den man sich nur vorstellen kann. Das soll ein Kleinteil-Archiv werden, hab halt tonnenweise von diesem Zeug und möchte da System rein bringen damit ich genau weis was ich hab. Ich zwinge keinen sich das anzutun und mir zu helfen, und sage auch nicht das es wirtschaftlichen Sinn ergeben soll. Hat Autotuning z.B. auch nicht und trotzdem machts fast jeder :-) MfG Franz
die kernaussage ist aber schon richtig: ein solches projekt verschlingt ne menge zeit und arbeit. das wird man nicht mal eben auf die beine stellen können. da würde ich mich eher damit befassen ein sortiersystem zu bauen, bei dem du die zahlreichen daten nicht über messungen sondern über deine eigenen eingaben am pc übergibst. Das fräsen interessiert mich sehr, aber das projekt ist (fast) nicht zu schaffen.
Ich weiss wie es billiger und schneller geht: Stell' einfach einen Polen ein, natürlich musste dem erstmal erklären was er zu tun hat, aber dann geht die Post ab. Unter dem Strich ist das viel billiger als einen popeligen Roboterarm zu entwickeln der am Ende nichtmal fehlerfrei laufen wird. Du kannst ausserdem mit Sieben, Magneten, Wasserbecken, Wind etc. schonmal vorselektieren. Die einfachsten Lösungen sind eben immer noch die besten. mfg
Angehängte Dateien:
-

laser.JPG
7,2 KB
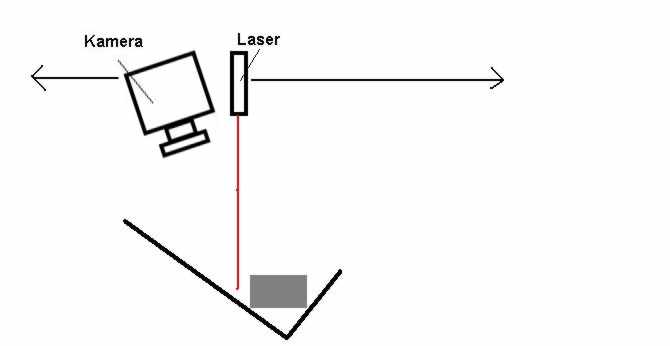
Ich hätte auch noch einen Vorschlag zur Objekterkennung. Du befestigst über dem Teil eine Kamera und einen Laser daneben. Vor den Laser kommt eine Linse, die den Laser so aufspaltet, dass eine Linie auf dem Objekt entsteht. Also wie die Barcodescanner in etwa. Kamera und Laser müssen auf einer Schiene befestigt sein, um damit man sie über das ganze Objekt hinwegbewegen kann. Wenn du jetzt das Bild fotografierst und den roten Strich suchst, hast du in etwa die Konturen deines Objekts auf einer bestimmten Linie. Jetzt wird die Kamera + Laser weiterbewegt und noch ein Bild. Man müsste die Kamera nur etwas auf den Laser zuneigen, damit man nicht eine gerade Linie sieht. Wenn das ganze Objekt abgetastet ist, hat man denke ich genug Daten um es eindeutig als etwas bestimmtes erkennen zu können, so dass der PC dann weiß dass das eine Schraube ist und sie richtig einsortiert. Du müsstest halt dann vorher eine Datenbank erstellen, in der einige charakteristische Daten deiner Teile hinterlegt sind bzw eine Software zu schreiben, die die Daten mit denen alter Teile vergleicht und sich merkt, welche Teile in welche Kiste kommen. PS: Hoffe man kapiert was ich meine, im Anhang is nochmal eine Skizze. mfg Michael
Hi. Das Projekt an sich ist absolut interessant. Der Aufwand dafür ist aber immens (nur mal um das ganze abzuschätzen). Leider habe ich selbst auch relativ wenig Zeit, um dich tatkräftig zu unterstützen. Aber vielleicht hab ich ja den einen oder anderen wertvollen Tipp für dich. Die Erkennung bzw. Vermessung eines Gegenstandes würde ich auf keinen Fall auf mechanische Art und Weise vornehmen. Du hast ja selbst schon einige Fehler beschrieben, die dabei auftreten können. Und um diesen Fehlerfällen beizukommen, wird die die Messanordnung sehr groß, kompliziert und damit natürlich immer noch fehleranfällig! Die beste Art wie man Objekte vermessen kann, ist sicherlich auf optischem Wege. Möglichkeiten wie den Laserscanner oder die Stereokamera hatten wir ja bereits. Die Berechnungen würden aber für einen Mikrocontroller viel zu weit führen und dessen Grenzen (zumindest die des Speichers) auf jedenfall sprengen. Deshalb gibts da ein paar Alternativen... * du nimmst einen PC als "Gehirn" für deinen Roboter, was natürlich nicht sehr schön aussieht und den Roboter auch relativ großen machen wird (die IOs werden auch nicht das wahre sein). * du nimmst den PC als externe Station zur Berechnung der Daten und gleichzeitig zur Speicherung der Daten in einer Datenbank. Die Steuerung des Roboters übernimmt ein Mikrcontroller! Damit hast du ne schöne modulare Trennung und da du sowieso nen PC als Datenspeicher benötigst, ist das wahrscheinlich eine gute Lösung (Übertragung der Daten könntest auch noch Wireless machen, dann brauchst nichtmal ein Kabel). * Der PC dient nur als Datenspeicher. Berechnungen machst du hardwaremäßig direkt beim Roboter mit einem eigens dafür programmierten FPGA (Programmierbare Logik). Auch eine wunderbare Lösung, wobei hier auch noch der PC entlastet wird. Nachteil ist die Programmierung des FPGA (könnte nicht gerade einfach sein ;-)). Ach ja... noch was. Wenn du die Dinge, die der Roboter untersucht, ordnen willst, dann bieten sich neuronale Netze an. Neuronale Netze sind eine Vorstufe zu KI (künstliche Intelligenz). Es gibt auf dem Gebiet einige Netze, die sich besonders für das Ordnen von Objekten eigenen. Du könntest zum Beispiel einige Merkmale definieren nach denen der Roboter die Gegenstände ordnen soll. Hast du das gemacht, erkennt der Roboter die Dinge und ordnen sie selbstständig nach den eingegebenen Kriterien! TOLL, oder ;-)). Damit ersparst du dir die Erstellung einer Datenbank, die alle nur erdenklichen Gegenstände enthält. So... jetzt noch eine Kleinigkeit in eigener Sache. Du bietest ja über deine Homepage das Fräsen von diversen Teilen an, oder?? Was kostet es denn, wenn ich dir einen genauen Plan des Teils gebe und du mir das fräst?? Um es etwas genauer zu machen... ich bin am Bauen eines MP3 Players und da ich nicht sehr glücklich über diverse 0815 Plastik Gehäuse bin, suche ich jemanden, der so ein Gehäuse machen kann. Von der Größe her würde es etwa in der Größenordnung von 100x70x15 mm liegen. mfg Andreas -- Andreas Auer aauer1 (at) sbox.tugraz.at Student of Telematics http://home.pages.at/aauer1 Graz, University of Technology
Ich danke für Eure Anregungen und Tipps. Am meisten interessiere ich mich jetzt für die optischen Lösungen, vor allem die neuronalen Netze. Davon hörte ich schon des öfteren. Frage mich aber ob sowas bezahlbar ist, bzw. ob man es überhaupt irgendwo bekommt? Jetzt habe ich diese "Vision" ;-) Ein Fliessband transportiert das Kleinteil an einer oder am besten an mehreren Kameras vorbei, die unter einem Blitzlichtgewitter ruck-zuck Aufnahmen von dem Objekt machen. Dann kommt das neuronale Netz ins Spiel und entscheidet was das für ein Teil sein könnte. Wenn es keine Ahnung hat, werden immer noch die Fotos gemacht (farbig) und man muss die Daten später nachträglich eingeben. Die Farbe des Teils kann das neuronale Netz ja vielleicht noch definieren, und vielleicht ja auch die grösse? Später muss man diese nicht erkannten Teile dann manuell definieren und das neuronale Netz wird mit den Daten automatisch gefüttert, so das es beim nächsten mal etwas schlauer ist als vorher. Das Problem liegt in der vielzahl unterschiedlicher Teile. Schwer zu erklären...stellt euch vor in einem Haus werden alle Gegenstände (Geräte, Maschinen, Möbel... weis der Fuchs) auseinander genommen, kleingehackt und durchgemixt. Dann haben wir einen LKW voll Kleinteilen, völlig ungeordnet und keiner weis welchen Zweck welches Teil haben könnte (ausser es ist gerade ne Schraube oder sowas). Es gibt eine Reihe unterschiedlich grosser Ablageplätze für die Kleinteile, deshalb währe die Frage für den Roboter auch: "In welche Ablage würde dieses Teil passen?"... sagen wir mal es gibt 10 verschiedene Grössen... hatte auch überlegt das der Roboter einfach mit der mittlersten Schachtel anfängt, das Teil rein legt und schaut ob es rein passt ohne oben raus zu gucken (Lichtschranken). Passt es, probiert er die nächst kleinere. Passt es nicht, probiert er die nächst grössere. Würde aber ewig dauern, und sagen wir mal bei 1 Mio Kleinteile (gar nicht mal so übertrieben, auf lange Sicht).... (da hilft auch der Pole nichts, der mir empfohlen wurde... bräuchte eine Armee) @Andreas: Schick mal ne Zeichnung an folien@handelsking.de MfG Franz
@Franz, der Pole sorgt höchstens dafür, daß Du weniger Teile zu zählen hast. Aber diese Zeiteinsparnis schwebt Dir sicher nicht vor. Das optische Vermessen von Objekten ist selbst von der einschlägigen Industrie noch nicht wirklich gelöst. Ähnliche Teile oder verdeckte Kanten sowie Schattenbildung (an Kantenerkennung) sind nachwievor ein großes Problem. Eine hohe Verarbeitungsgeschwindigkeit setzt extrem teure Hardware voraus (ohne eine Erfolgsgarantie bei Projektstart) und ist sebst als anspruchvolles Hobbyprojekt sicher nicht zu bewerkstelligen. Bildverarbeitung (im geforderten Sinne)ist immer noch ein komplexes Spezialgebiet und wird es auf absehbare Zeit auch bleiben. MfG Manfred Glahe
hi, du musst Maikaefer, Marienkaefer und Ameisen zuechten , etwas an den Genen aendern etwas spezifische Intelligenz einspritzen..... das werden deine Arbeiter sein. Ich glaube du wirst schon daran scheitern das ganze zeugs so zu entwirren damit es vernuenftig auf deinem foerderband zu liegen kommt ....also keine mutter mit einer bleistiftspitze im gewinde,kein weihnachtsgloeckchen im abgesaegten rohrstueckchen und der gummiring will sich einfach micht von der musterbeutelklammer trennen...so ein JAMMER. genuegt dieser Anfang? amen ed ps: habe vor jahren eine sortieranlage gebaut, die kupfer von anderen metallen trennt.
Ich hab als Praktikant mal an einer Bilderkennung mitprogrammiert. Wenn du das mit Neuronalen Netzen und allem drum und dran machen willst, dann ist das ein Fulltime-Job für viele viele Monate. Gruß Oliver
Das ist klar, dass du Bilderkennung + neuronales Netz nicht auf nen Tag oder ne Woche programmieren kannst. Aber es ist sicher eine sehr brauchbare Erfahrung sowas zu realisieren! @Franz: Ein neuronales Netz ist eigentlich nichts was du kaufen musst/kannst. Es ist im Prinzip nur ein Stück Software. Und bei manchen ist es so, dass du sie gar nicht trainieren brauchst. Sie ordnen Gegenstände selbstständig nach bestimmten Merkmalen und trainieren sich so selbst. Damit werden sie im Laufe der Zeit immer besser! Nur wenn sie Fehler machen, dann musst das korrigiert werden. Bezüglich der Zeichnung... im Moment hab ich leider noch keine vorliegen und leider auch keine Zeit um welche anzufertigen. Wenns recht ist, komme ich später nochmal auf dich zurück und schick dir mal eine Zeichnung. Könntest mir noch größenordnungsmäßig nen Preis sagen?? mfg Andreas
Die Aufbereitung der Kleinteile zum archivieren ist eine Sache für sich, das ist schon richtig. Dafür habe ich aber schon eine gute Lösung, die völlig ausreicht. Das was wirklich das Problem ist, ist die Archivierung an sich, sprich die gewinnung der Daten über die Kleinteile. @Andreas: Kommt drauf an wie das Gehäuse aussieht, ich kann nur halb-3D fräsen, d.h. ich kann z.B. keine Gussform für einen Gartenzwerg erstellen. Aber so Dinge wie in meinem Shop unter aufschrauben.de die sind weniger das Problem (d.h. Platten kann ich fräsen mit bis zu 20 Tiefen-Stufen). Für "richtiges" 3D-Fräsen muss ich mir erst noch eine CAD/CAM Software zulegen die nicht gerade billig ist. Wenn Du mir bei meinem Projekt aktiv hilfst gebe ich mein Bestes Dir ein schönes MP3 Player Gehäuse zu bauen (kostenlos natürlich) MfG Franz
@Franz: Tja... für volle aktive Hilfe hab ich erstmal relativ wenig Zeit! Muss noch für ne Firma ne Software entwickeln. Ich kann dir vielleicht ein bisschen bei der Unterteilung des Roboters in kleinere Module helfen. Für die konkrete Entwicklung/Realisierung einzelner Module fehlt mir aber momentan - wie gesagt - leider die Zeit (geht frühestens anfang September). Vorallem die optische Einheit (Laserscanner) würde mich stark interessieren, wobei die wahrscheinlich nicht gerade billig werden dürfte! Ich bin aber auf jedenfall durch diesen Thread mal am laufenden, und ich kann dir ja auch mal ne Mail schreiben, wie's so geht mit deinem Projekt! mfg Andreas
Hi Andreas, es eilt ja auch nicht so sehr. September ist schon ok. Werde für das Projekt eine Website mit Login-Bereich erstellen, für alle die mir dabei helfen. Möchte das übersichtlich gestalten :-) MfG Franz
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.